平行砂轮磨削球头立铣刀后刀面的轨迹算法研究
2023-08-18 06:37:32马忠宝马术文
机械设计与制造 2023年8期
唐 军,马忠宝,马术文,江 磊
(西南交通大学机械工程学院,四川成都 610031)
1 引言
球头立铣刀在加工复杂曲面时展现出了较好的加工适应性和较低的震动表现,在加工复杂腔体结构以及其他复杂型面上,球铣刀同样十分便捷,因而,球头立铣刀广泛应用于加工航空航天,汽车等制造产业[1]。球头后刀面是保障球头立铣刀加工质量的关键结构,对刀具的使用寿命影响巨大[2]。球头立铣刀的后刀面加工质量很大程度上决定了球头立铣刀的回转精度及刃线质量。
立铣刀后刀面依据所处的刀具结构不同可分为:周刃后刀面和端刃后刀面。对于刀面的类型定义,文献[3]根据磨削方式将后刀面分为偏心型、凹面型和平面型三种,其中偏心型后刀面的特点为:刀尖具有较大的强度,刃口加工性能良好。而平面型后刀面的刃口强度介于其他两种后刀面之间。针对立铣刀后刀面的研究,文献[4]对后刀面的磨削工艺进行了研究,给出了磨削周刃后刀面的三种砂轮初始姿态定义方式;针对端刃后刀面,文献[5]提出了一种用于制作具有等法向后角后刀面球头立铣刀端齿部分的数学模型,并计算了砂轮的位置、方向和干涉的条件。文献[6]在五轴磨床上设计并采用圆锥滚子磨削球头铣刀后刀面,建立了等间隙角后刀面的数学模型,并对后刀面的不同形状进行了设计和优化。文献[7]基于现有的常见五轴数控磨床传动轴的运动特点,采用运动几何原理,基于正交螺旋“S”形刀刃曲线,分别就磨削球头立铣刀前刀面和后刀面的刀位轨迹求解模型进行了建模。文献[8]基于已建立的球头立铣刀前刀面加工数学模型,通过分析加工中前刀面与后刀面坐标系的空间运动关系,根据微分几何理论建立了后刀面的加工数学模型。文献[9]基于等导程的球面切削刃螺旋曲线,提出了球头端刃后刀面的等径向后角刃磨模型。综上,目前的球头后刀面磨削工艺的研究主要关注于端刃加工,且对于后刀面的加工工艺研究将端刃与周刃分割开来,导致磨削连贯性不佳,端刃与周刃后刀面衔接表面质量低。
针对上述研究不足,这里研究了利用平行砂轮回转面加工球头立铣刀后刀面的磨削工艺,并提出了球头立铣刀端刃及周刃后刀面连续加工的磨削轨迹算法。该算法主要围绕周刃偏心型后刀面的磨削工艺展开,通过砂轮磨削姿态过渡,实现了后刀面衔接部分的光滑过渡。通过仿真及试验验证可知,该算法在加工效率,后刀面质量等方面得到了较为明显的改善。
2 球头立铣刀刀刃曲线建模
2.1 周刃建模
前人针对周刃刀刃曲线模型开展了大量研究[10−11]。这里建立工件坐标系Ow−XwYwZw,令Zw轴重叠于刀体轴线,定义周刃起点所在的径向截面为坐标平面XwOwYw,刀具轴线于XwOwYw平面内的垂足为坐标系原点Ow,如图1所示。
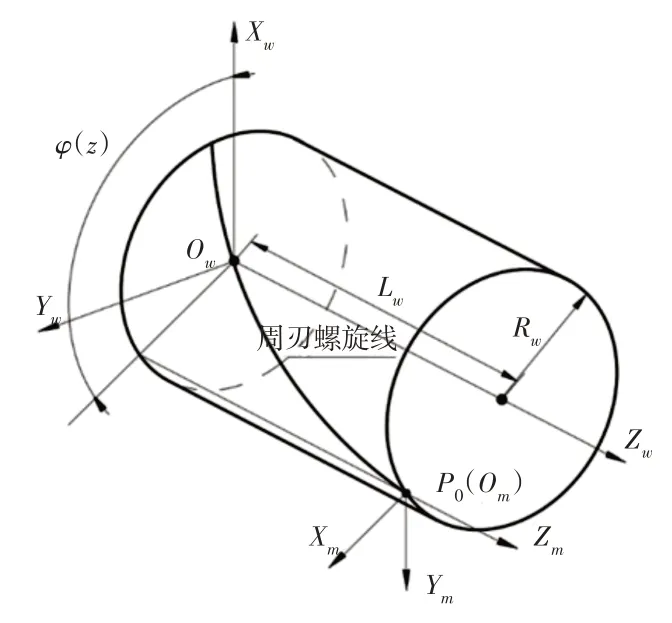
图1 周刃刀刃曲线建模示意图Fig.1 Schematic Diagram of Modeling of Circumferential Blade
以刃线沿Zw轴正方向的运动量为自变量,不妨设为z,则建立周刃上任意点P0的坐标为:
式中:Rw—刀具回转半径;Lw—周刃长度;φ(z)—点P0相对于Xw轴绕Zw轴的回转角度。
2.2 端刃建模
建立端刃坐标系Od−XdYdZd,以刀具回转轴为Zd轴,以球头端刃刃线起点所在径向截面为XdOdYd平面,令端刃圆心重合与坐标系原点Od。建立该坐标系到工件坐标系的变换矩阵Td−w如下:
将在端刃坐标系下进行端刃曲线建模描述:
(1)非正交“S”形刀刃曲线模型
以文献[12]设计的一种具有齿偏中心量h的非正交“S”形球头刀刃曲线进行建模,如图2所示。
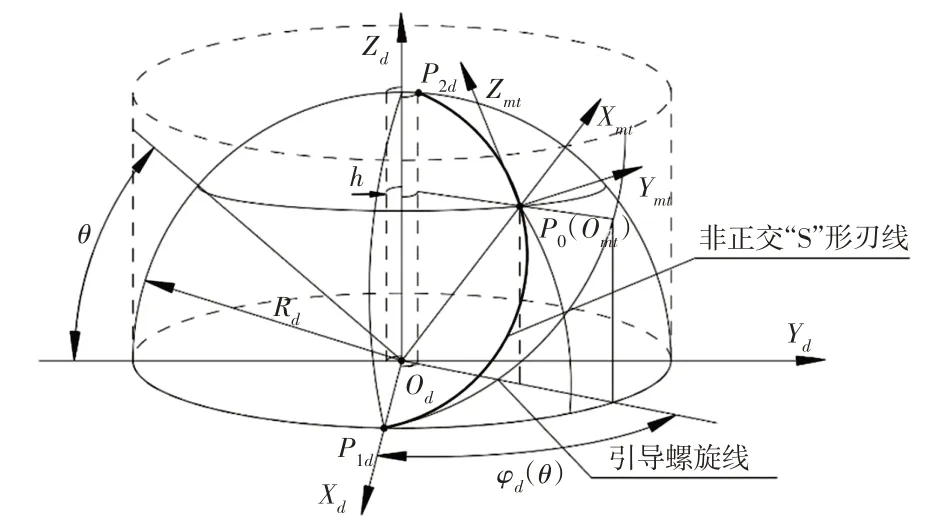
图2 非正交“S”形球头刀刃曲线建模示意图Fig.2 Schematic Diagram of Modeling of Non−Orthogonal“S”Shape Ball Nose Curve Surface
P1d P2d段曲线上刀刃点P0坐标可表达为:
式中:θ—自变量纬度角;
Rd—球头半径;
φd(θ)—刀刃点P0处回转角。
如图3所示,θ其取值范围为[0,θd],同时受齿达中心量lh的影响,“S”形曲线末点处P2d的纬度角θd为:
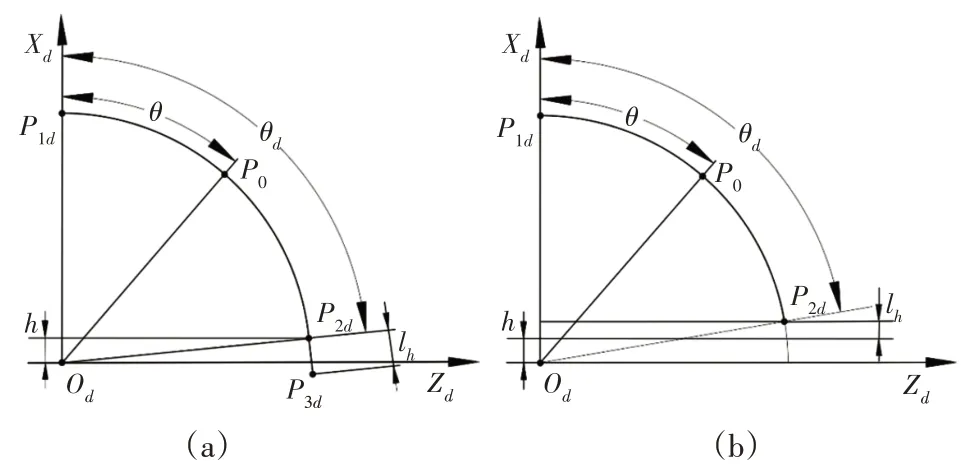
图3 纬度角取值范围示意图Fig.3 Schematic Diagram of the Range of Latitude Angle
(2)齿过中心曲线建模
齿过中心曲线段P2dP3d为端刃螺旋刃线末点的延长线,如图3(a)所示。由式(3)可求得端刃曲线末点P2d的坐标及切矢量Fp,可得齿过中心曲线上任一点P0坐标表达为:
式中:t—自变量。
2.3 后刀面坐标系及转换
为实现后刀面相关参数和计算磨削轨迹的简化描述,基于前文定义的刀刃曲线模型,建立坐标系如下:
(1)周刃坐标系
定义周刃坐标系为周刃上的动坐标系Om−XmYmZm,如图1所示。将坐标系Om−XmYmZm原点Om建立在周刃曲线P0点上,定义坐标轴Zm重合于过P0的周刃母线,以刀体轴线过点P0的垂线为Xm轴,Ym轴可由右手定则确定。最终,建立周刃坐标系转换到工件坐标系的坐标变换关系Tm−w为:
其中,自变量z的取值范围同式(1)所示。
(2)“S”形曲线坐标系
定义坐标系Omt−XmtYmtZmt为“S”形曲线坐标系,令其为沿非正交“S”形刀刃曲线运动的动坐标系,如图2所示。建立坐标原点Omt为非正交“S”形曲线上的点P0,以Omt点对应的回转体母线切线方向为Zmt轴,以Od与点P0的连线为Xmt轴,Ymt同由右手定则确定。则可建立“S”形曲线坐标系到端刃坐标系的变换矩阵Tmt−d为:
其中,自变量θ的取值范围同式(3)。
(3)齿过坐标系
定义齿过坐标系为跟随齿过中心曲线的活动坐标系Oms−XmsYmsZms。其以齿过中心曲线刀刃点P0为坐标原点Oms,Zms轴平行于非正交“S”形曲线末点的Zmt轴,Yms轴平行于非正交“S”形曲线末点的Ymt轴。同样,可建立齿过坐标系到端刃坐标系的矩阵变换Tms−d为:
其中,自变量t的取值范围同式(5)。
3 砂轮磨削后刀面轨迹计算
3.1 砂轮初始磨削姿态及工艺参数定义
砂轮初始磨削姿态是指,各项工艺参数为零时的砂轮姿态。各项工艺参数均以初始姿态为基准,对砂轮实际磨削姿态进行参数化调整。处于计算砂轮姿态便捷性及对磨削连续性的考虑,分别建立周刃和端刃后刀面的砂轮初始磨削姿态在其刀刃曲线对应的坐标系下。
(1)周刃偏心型后刀面的初始磨削姿态
由周刃偏心型后刀面的磨削成形原理[4],定义砂轮端面在初始磨削姿态下重合于平面XmOmZm,定义抬角α为砂轮端面在平面XmOmZm内与Xm轴的夹角(其为关于周刃后角λm和螺旋角β的参数),如图4所示。
图4 周刃和非正交“S”形部分后刀面砂轮磨削姿态示意图Fig.4 Schematic Diagram of Grinding Posture of Peripheral Edge and Non−Orthogonal“S”−Shaped Part of Flank Face Grinding Wheel
(2)端刃非正交“S”形部分后刀面的初始磨削姿态
如图5所示,定义砂轮回转面母线在平面XmtOmtZmt内的投影与Zmt轴的夹角为纬度角θ,定义“S”形后角λmt为砂轮端面在平面XmtOmtYmt内的投影与Ymt轴的夹角。
图5 齿过中心部分后刀面磨削姿态示意图Fig.5 Schematic Diagram of the Grinding Posture of the Flank Face of the Tooth Passing the Center Part
(3)端刃齿过中心部分后刀面的初始磨削姿态
针对齿过中心部分后刀面,如下图所示,令非正交“S”形部分末点P2d的砂轮磨削姿态为端刃齿过中心部分后刀面的初始磨削砂轮姿态,定义纬度角θd为砂轮回转面母线在平面XmsOmsZms内与Zms轴所成夹角,且定义齿过中心后角λms为砂轮端面在平面XmsOmsYms内与Yms轴的夹角。
(4)工艺参数定义
考虑到实际加工过程中为控制磨削质量,避免干涉,在保证后刀面形貌的同时砂轮姿态通常要进行一些调整。定义后刀面的法矢为Fg0,砂轮可绕矢量Fg0旋转砂轮摆角μ避免干涉,如图6所示。

图6 砂轮摆角定义示意图Fig.6 Schematic Diagram of Grinding Wheel Swing Angle Definition
3.2 后刀面连接处的过渡设置
(1)从周刃和非正交“S”形曲线连接处的砂轮姿态过渡
根据初始姿态定义可知,周刃和端刃部分砂轮磨削姿态不一致,可能导致后刀面干涉或参数突变。为了保证磨削过程的流畅,需考虑后刀面连接处的砂轮磨削姿态过渡。易知,周刃与端刃刃线光滑连接,因此,该点处的周刃坐标系重合于“S”形曲线坐标系。因此,这里在此处设置的过渡方式为:夹角α沿某一规律递减为0,同时,砂轮磨削点P0切矢量与Ymt轴在平面XmtOmtYmt内的夹角从零以线性规律变化到圆弧回转面后角λmt,如图7所示。

图7 砂轮磨削姿态过渡示意图Fig.7 Schematic Diagram of Grinding Wheel Grinding Attitude Transition
(2)后刀面连接处参数的过渡设置
实际生产中各段后刀面结构参数和工艺参数会出现不一致的情况,需要在各段后刀面之间设置过渡方式。首先根据每条刃线段的起始点定义磨削参考点。端刃非正交“S”形曲线两端分别于周刃螺旋线和端刃齿过中心曲线相连接,故定义四个磨削参考点,分别是:周刃螺旋线起点S1,周刃螺旋线末点S2,端刃非正交“S”形曲线末点S3,端刃齿过中心曲线末点S4,如图8所示。
图8 磨削参考点示意图Fig.8 Schematic Diagram of Grinding Reference Point
此时,每个磨削参考点对应的后刀面角度和砂轮摆角参数名称,如表1所示。
表1 各磨削参考点后刀面宽度和砂轮摆角参数名称Tab.1 Parameter Name of the Flank Width of Each Grinding Reference Point and the Swing Angle of the Grinding Wheel
将参数在各个参考点之间的过渡形式描述为线性过渡。从而,周刃、端刃非正交“S”形曲线和齿过中心部分后刀面角度和砂轮摆角过渡的参数表达式为:
3.3 磨削轨迹计算
为简化求解过程,这里分别在对应的后刀面坐标系下开展砂轮磨削轨迹的相关计算,即砂轮圆心点坐标Og以及砂轮轴矢量Fg的计算。这里的磨削轨迹过程主要针对第一后刀面的加工展开。为统一刀位表达,结合磨削过程及式(2)、式(6)~式(8)对端刃及周刃后刀面在工件系下建立砂轮的磨削轨迹表达。
(1)周刃后刀面
根据周刃初始磨削姿态定义,并考虑到周刃到非正交“S”形曲线连接处的砂轮姿态过渡,建立砂轮端面圆心点Og在周刃坐标系的表达为:
式中:Rg—砂轮端圆半径。
同理,砂轮轴矢量Fg在周刃坐标系下的表达如式(12)所示:
(2)端刃非正交“S”形部分后刀面
根据磨削非正交“S”形端刃后刀面砂轮初始姿态定义,则在“S”形曲线坐标系下的砂轮端面圆心点Og表达为:
在“S”形曲线坐标系下,其砂轮轴矢量单位矢量Fg可表达为:
(3)齿过中心部分后刀面
根据端刃齿过中心部分后刀面的砂轮初始姿态定义可知,齿过坐标系下的砂轮端面圆心点Og坐标可表达为:
齿过坐标系下,其砂轮轴矢量Fg可表达为:
(4)添加砂轮摆角后
为便于进行计算,引入绕空间任一单位矢量N=Nxi+Nyj+Nzk旋转角度θ的旋转矩阵通式:
其中,versθ=1−cosθ。
根据砂轮摆角的定义,在周刃坐标系下则有:
其中,后刀面法矢量Fg0在周刃坐标系下表达式为:
端刃部分添加砂轮摆角在对应的坐标系下同理。
4 算法验证
这里砂轮磨削轨迹算法的验证流程,如图9所示。这里基于VC++环境开发了一套算法模块,以实现球头立铣刀后刀面的刀位计算(即Og和Fg的计算),以及机床NC的处理。实现流程为:首先,在参数列表中输入磨削球头后刀面的相关结构工艺参数,通过算法模块,输出包含砂轮圆心坐标及轴矢量的刀位文件;再以刀位文件为输入,进行后置处理,将刀位文件转换为指定数控机床的NC代码。其后置过程在此不在赘述。三维仿真在Veri⁃cut8.0环境下实现,本仿真选用具有4切削刃结构的球头立铣刀进行,仿真设计数据,如表2所示。

表2 四刃球头立铣刀后刀面相关参数Tab.2 Relevant Parameters of Flank Face of Four-Blade Ball End Mill
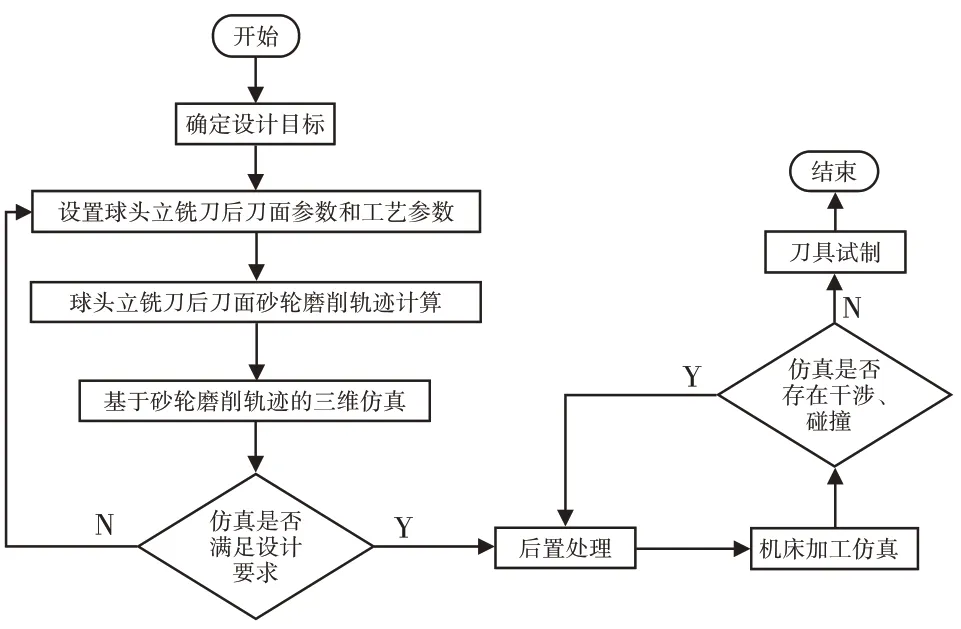
图9 球头立铣刀后刀面磨削算法验证流程Fig.9 Flowchart of Algorithm Verification of Flank Grinding Trajectory of Ball End Mill

图10 四刃球头立铣刀后刀面仿真结果图Fig.10 Simulation Results of the Flank Face of a Four−Flute Ball End Mill
实际加工在精利五轴数控工具磨床上进行,刀具结构参数测量在刀具检测仪PG−1000 上进行,实物结果,如图11 所示。通过刀具检查仪可以看出,周刃、端刃后刀面实现了光滑连接。除砂轮安装位置误差和砂轮圆角造成的后刀面宽度和角度误差外,均与设计值基本保持一致,满足精度要求。综上所述,对加工实物进行测量的结果证明了磨削轨迹算法在实际加工中的正确性与有效性。

图11 在刀具检测仪上的球头立铣刀实物图Fig.11 The Physical Picture of the Ball End Mill on the Tool Detector
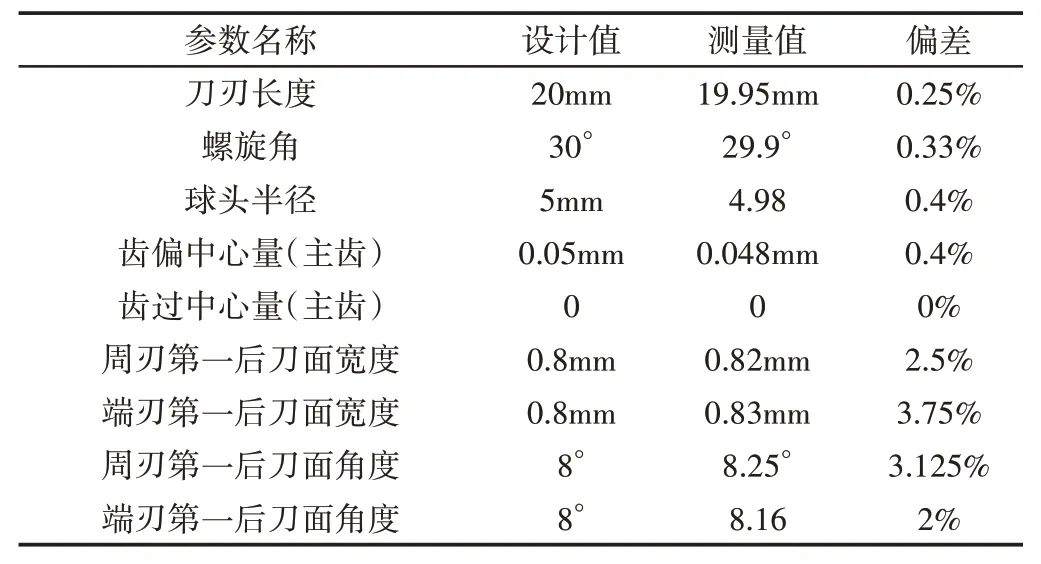
表3 四刃球头立铣刀实物参数测量结果Tab.3 Measurement Results of Physical Parameters of Four-Flute Ball End Mills
5 结论
(1)基于一种具有齿偏中心量的球头立铣刀刀刃曲线建模和周刃偏心型后刀面成形原理,提出了球头立铣刀端刃后刀面的磨削工艺,提出了一套得到光滑的偏心型后刀面的砂轮磨削轨迹算法。(2)通过磨削仿真和实际加工,成功制造了半径为5mm的四刃球头立铣刀,且其参数精度误差不超过0.4%,验证了该磨削轨迹算法的正确性和有效性。
猜你喜欢
工具技术(2023年9期)2023-10-24 02:21:54
中国机械工程(2022年16期)2022-09-03 01:47:16
金属加工(热加工)(2021年8期)2021-08-26 06:15:14
装备制造技术(2020年2期)2020-12-14 03:09:32
计量学报(2020年7期)2020-08-07 02:55:36
制造技术与机床(2019年12期)2020-01-06 03:18:06
汽车实用技术(2019年7期)2019-04-18 07:55:52
金属加工(冷加工)(2018年3期)2018-03-26 09:37:07
伴侣(2017年6期)2017-06-07 08:55:22
电气化铁道(2016年2期)2016-05-17 03:42:34