受限空间隧道病害巡检机器人机构设计与研究
2023-08-14 02:15姚柏强陈赛旋李荣
河南科技学院学报(自然科学版) 2023年4期
姚柏强,陈赛旋,李荣
(1.上海工程技术大学机械与汽车工程学院,上海 201620;2.苏州融萃特种机器人有限公司,江苏 苏州 215000)
随着国家大力发展隧道建设,截至2021 年底,我国公路隧道总长已经达到了24 698.9 km.目前,隧道设计寿命为70~100 a[1],在漫长的运营期里,出现的地质灾害,形成不同程度的病害.宏观上看为横断面的收敛变形以及纵向的不均匀沉降;微观上看为隧道管片接缝的张开与错台[2],同时,隧道变形所引起的管片接缝的张开、错台等会对盾构隧道的防水效果产生巨大影响[3-4].当错台量超过一定的量值时[5],防水密封垫不再重叠, 防水失效, 有关隧道结构安全所引发的运营事故对人民生命财产安全造成极大威胁.因此,定期进行隧道病害检测是必要的[6].
目前,主要针对这类病害的常规监测手段仍然以人工巡检为主[7],即依靠人眼检测以及人工仪器检测.该检测方法一般是利用升降平台将人送到指定位置进行检测,在隧道运营状态下,易造成交通堵塞.尤其大直径过江盾构隧道,在满足机电、通风、消防、排水等要求的前提下,隧道顶部和侧壁可用于进行人工检测的空间极为受限.加之机电设备的运行、车辆尾气等,使得受限空间内隧道的安全检测变得极为困难.并且这种靠肉眼观测和借助工具检测的方法效率低、精度差,不能准确表达和记录病害的形态与性质,无法保证检测结果的客观性,已远不能满足现代化隧道高质量快速检测的需求.因此,自动化受限空间巡检机器人的使用必然成为隧道病害检测的趋势[8].
针对检测类机器人机构设计研究方面的问题,杨春等[9]设计的双轮足复合式串联机构具备交叉面过渡、跨越壁面障碍的能力,同时设计的多级密封装置,使机器人可以稳定吸附于粗糙壁面进行测量;范本等[10]研究了一种测量系统,采用徕卡TM30 测量机器人作为测量仪器,利用Visual Basic 开发了一套检测系统, 实现远程控制测量机器人进行检测数据的自动采集和存储,并由计算机自动进行数据分析处理、自动预警和报警,从而达到自动检测隧道变形的目的.
根据上述研究,常用的人工检测方式不仅效率低、精度差,而且无法检测危险狭小空间内的病害,目前,上述巡检机器人存在的共有问题是检测内容单一,虽然具有良好的检测精度,但是避障能力以及环境适应能力差,无法对受限空间内隧道进行检测.本文提出一种可实现隧道受限空间病害监测巡检机器人的新型机构,采用两段式轨道行走机构搭载四自由度的伞形机械臂的形式,使机器人实现大范围监测的同时可以穿过狭小空间实现隧道受限空间的安全检测.
1 隧道病害巡检机器人结构设计
1.1 整体结构
机器人主体结构包括,轨道行走机构、伞形折展机构、被动行走机构和末端传感器.如图1 所示,可实现机器人轨道移动和受限空间检测管片接缝张开和渗漏水病害功能, 达到以机器人代替人工实现快速化、常态化、高质量隧道病害监测的目的.
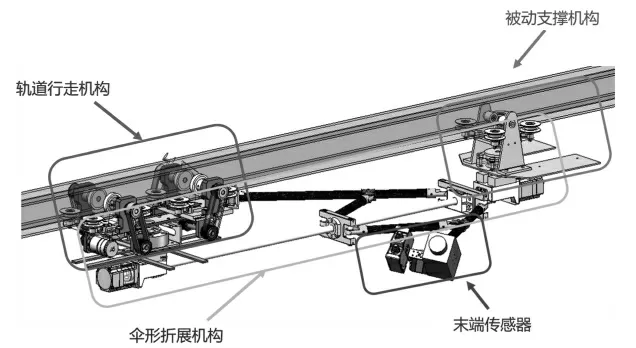
图1 机器人整体结构Fig.1 Overall structure of the robot
1.2 轨道行走机构
轨道行走机构用于实现机器人轨道稳定行走功能.轨道行走机构采用轨道悬挂式移动小车,如图2所示,可拆卸式滚轮与双电机提供双驱动.该机构采用前后两节形式,两节结构一致,每一节皆通过直流伺服电机带动同步带轮传动橡胶轮,实现在轨道上运动.两节移动主板通过角接触球轴承和中间连接板连接,使前后两节拥有足够的角度实现在工字轨道转弯.导向轮承担导向的作用,使机器人不会脱离轨道或者横向偏移.
1.3 伞形折展机构
根据受限环境设计的伞形折展机构,机构收拢状态下可满足受限空间的通过要求,如图3 所示;展开状态下可实现大范围检测要求,如图4 所示.该结构具有结构强度高和灵活性好的优点,机构设计采用左右对称设计,四自由度的长臂展设计使机械臂末端的监测传感器拥有较大的监测范围,电机①控制丝杆转动,使得丝杆上的移动螺母可以前后移动,实现伞形折展机构的张开与合拢,电机②控制整个伞形机构的翻转,机构末端的两个舵机实现传感器两个方向的转动,可实现隧道顶部壁面的各个位置的检测,如图5 所示.
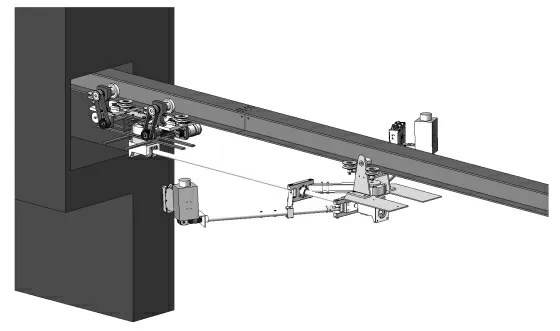
图4 巡检机器人张开姿态进行扫描示意Fig.4 Schematic diagram of the detection robot opening its attitude for scanning
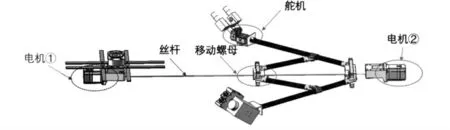
图5 伞形折展机构Fig.5 Umbrella folding mechanism diagram
1.4 被动行走机构
被动行走机构的设计能够有效减小丝杆所承受的剪切力,使丝杆不成为悬臂梁结构,同时提升机器人的工作稳定性.该机构主要包括支撑架、橡胶轮、止推球轴承组、导轮组,其中止推球轴承组使整个被动支撑机构拥有跟随驱动机构在轨道上转弯的能力,导轮的作用为限制小车横向偏移,提高运行稳定性,如图6 所示.
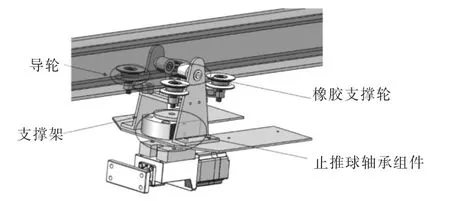
图6 被动行走机构Fig.6 Diagram of passive walking mechanism
2 伞形折展机构运动学
为提升隧道检测机器人的工作效率,伞形折展机构需要具备大工作空间的特点.在通过受限空间时需要收拢,收在驱动机构和被动支撑机构内,使得伞形折展机构上搭载的传感器能够安全通过受限空间,提升机器人整体运动稳定性.根据机载机构轻量化和大工作空间的需求,关节1 采用直流伺服电机搭配行星减速器和联轴器输出扭矩;关节2 采用丝杆螺母传动机构,将滑块移动推动连杆转动,利用连杆机构运动特性增大活动角度;关节3 和4 采用60 kg 大扭矩舵机,可实现机构末端的双自由度的转动,调节传感器方向,满足作业自由度要求.
在关节2 处建立伞形折展机构几何数学模型,如图7 所示,重点解决滑块移动变量与关节2 处的角度变量之间的转换.
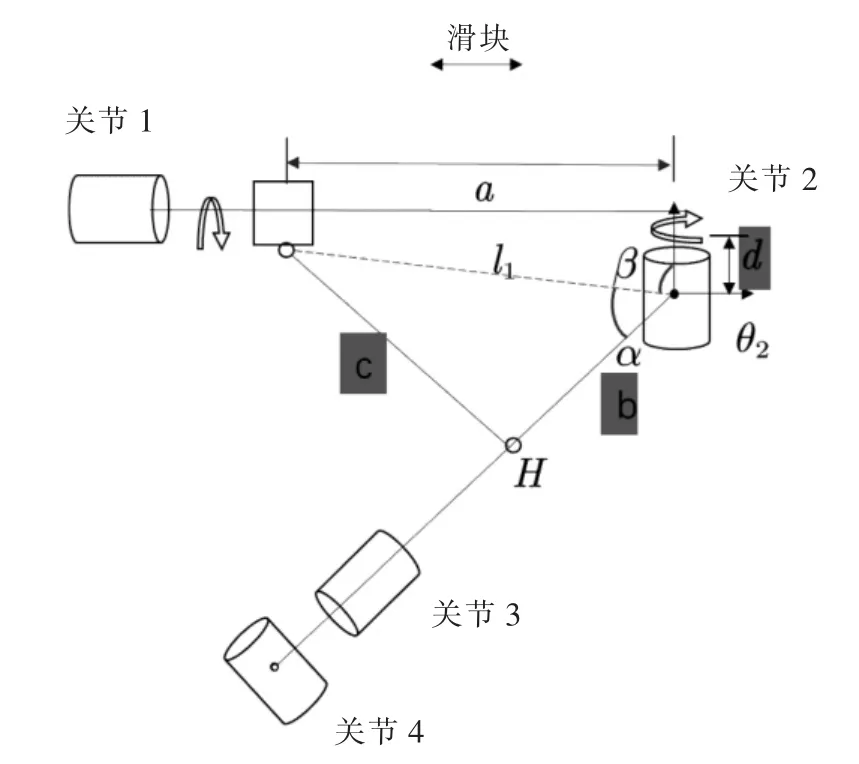
图7 伞形折展机构几何数学模型Fig.7 Geometric mathematical model of umbrella folding mechanism
图7 中θ2分别由α、β两 部分组成,β是 随a变化的变量角,α为铰链处的固定偏角
综上所述,直线位移量a 与关节二的旋转量θ2的转换如式(1)所示
对伞形折展机构采用D-H 参数法建立运动学模型[11].如图8 所示,以点O0为基坐标系原点建立机构各连杆的D-H 坐标系,各连杆的D-H 参数如表1 所示.

表1 伞形折展机构D-H 参数表Tab.1 Table of D-H parameters of umbrella mechanism
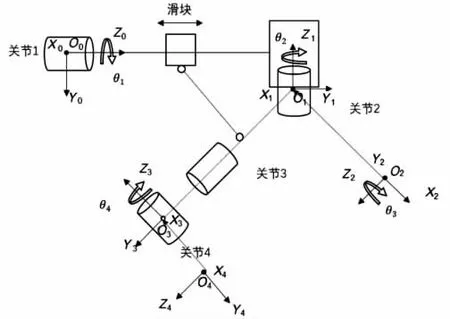
图8 伞形折展机构D-H 坐标系Fig.8 Umbrella actuator D-H coordinate system
其中相邻两坐标系转换遵循式(2)
机构的末端位姿可表示为式(3)
将表1 中参数带入公式(2)可得各坐标系转换公式(4)
式(4)中:αi为 连杆转角,ai为连杆长度,di为连杆偏距,θ为i关节角,d1=900 mm,a2=70 mm,d3=500 mm.根据坐标系之间的位姿变换关系,可以得到机器人传感器末端坐标系{O4}相对于基坐标系{O0}的位姿变换矩阵0T4如式(5)所示
其中
式(5)中:sθ1为sinθ1,cθ1为cosθ1,NR为机构末端姿态,NP为机构末端空间位置.根据机构末端状态求解出4 个关节角,运动学逆解解析式如式(6)-(9)所示
3 机器人运动学仿真
3.1 机器人轨道运动规划仿真
机器人轨道运动中重点解决机器人在工字轨道上转弯稳定性和位置偏移情况.依据过江隧道顶部空间,设计轨道的转弯半径为1 m,如图9 所示,为了使得机器人能够平稳度过轨道的弯道部分,机器人采用的是前驱形式,即行走驱动机构作为车头带动后面的被动支撑机构.
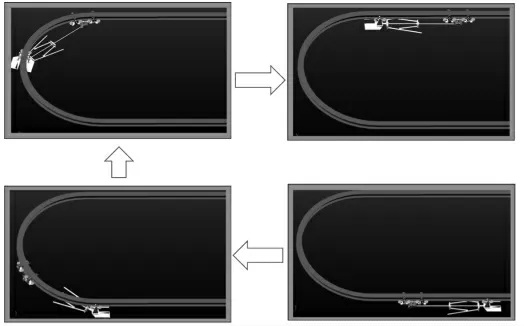
图9 机器人在轨转弯示意图Fig.9 Schematic diagram of robot turning in orbit
为了验证上文中提出的机器人轨道移动可以实现平稳转弯, 在ADAMS 2020 环境下对机器人进行了运动仿真模拟,得到了机器人在环形轨道上的运动情况.
将隧道机器人的3D 模型导入ADAMS 软件中,如图10-a 所示,设定重力方向为Y 轴,轨道平直方向为X 轴,右手定则确定Z 轴.在设置连接部分时,设置了35 个固定副,1 个圆柱副和62 个旋转副.其中圆柱副设置在伞形机械臂的丝杆螺母上,在设置驱动部分设置了驱动机构上的四个滚轮的旋转驱动,采用的驱动函数是速度关于时间变化的增量式STEP 函数,速度设定为140 mm/s,包含启动加速部分,中间匀速部分和停止减速部分,在金属导轮的导轮臂上设置0.6 N·m 的转矩,模拟弹簧对两侧弹簧拉紧的拉力.为了模拟还原滚轮与轨道的接触情况,本文中聚氨酯包胶滚轮与铝合金轨道接触,接触静摩擦系数设置为0.9, 动摩擦系数设置为0.7, 将铝合金导轮与轨道之间的静摩擦系数设置为0.3, 动摩擦系数设置为0.2.设置仿真时间75 s,步长为700.
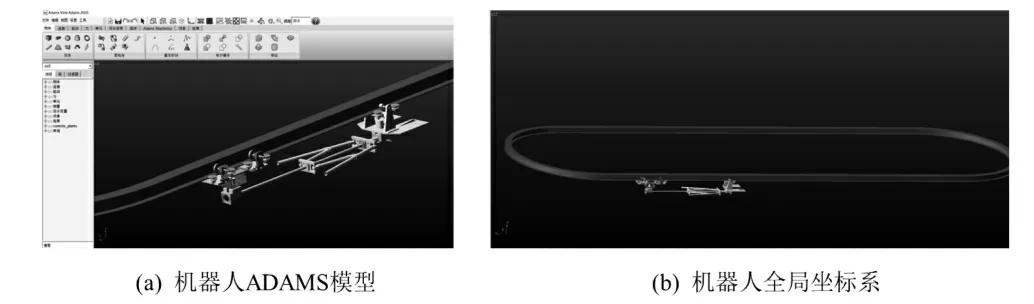
图10 ADAMS 中隧道机器人3D 模型Fig.10 3D model of tunnel robot in ADAMS
为方便观察机器人在运动过程中机身的稳定性和速度变化情况,如图10-b 所示,在环形轨道中心位置建立全局坐标系OXYZ.机器人位于轨道上,XOZ 平面平行于水平面,Y 轴正方向垂直于水平面向下,X 轴方向指向机器人起始位置的水平前进的方向.如图11 所示,机器人质心在X 轴和Z 轴方向位移稳定按照轨道变化,表明运动流畅平稳度较好.在重心方向Y 轴上,机器人机身虽上下略有波动,且波动最大幅度仅为0.2 mm,总体来说质心高度没有变化.这表明机器人在轨道上运行时,在导轮的辅助下,运动稳定性较高.此外,如图12 所示,质心速度的变化与预期设定速度一致.
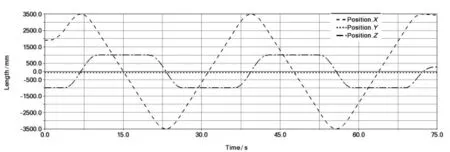
图11 隧道机器人质心XYZ 方向轨迹Fig.11 Tunnel robot centroid XYZ-direction trajectory
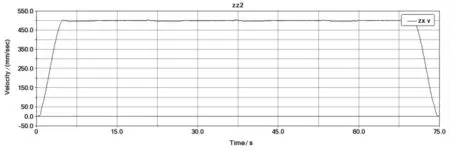
图12 隧道机器人速度变化Fig.12 Tunnel robot speed change diagram
3.2 伞形折展机构仿真
如图13 所示为伞形折展机构导入Adams 进行仿真分析,在运动设定中,设定丝杆螺母的移动为10 mm/s,时间为22.2 s,电机2 转动的角度为20°,转速为1°/s,舵机①和舵机②分别转动90°和60°,实现伞形机构末端运动到检测位置的动作.
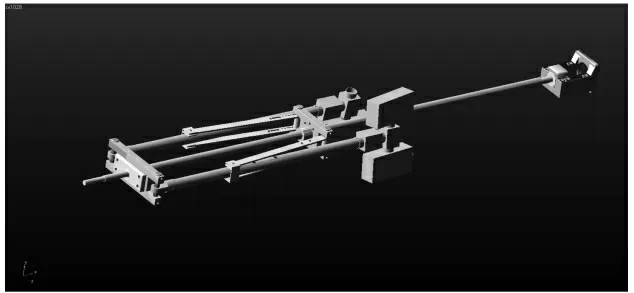
图13 伞形折展机构Adams 模型Fig.13 Adams model of the umbrella folding mechanism
得到伞形机构末端到达监测位置时的位置信息,如图14 所示,X 方向上的位置变化为221.953 mm,Y 方向上的位置变化为164.975 mm,Z 方向上的位置变化为387.389 mm.总位移为421.64 mm.
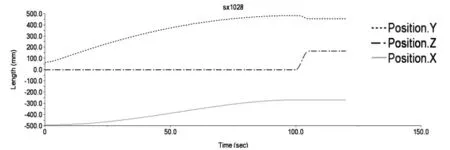
图14 伞形机构末端位置轨迹信息Fig.14 End position trajectory information of umbrella mechanism
4 机器人实验
通过8 组红外摄像头捕捉安装在机器人上的标记点来获取各点的位置信息.如图15 所示.
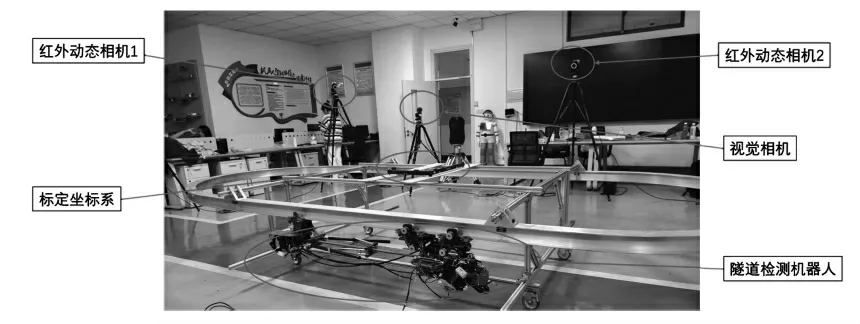
图15 伞形折展机构实验示意图Fig.15 Schematic diagram of the experiment of the umbrella folding mechanism
4.1 在轨移动稳定性实验
如图16 所示为移动机构质心位置的运动轨迹,机器人在X 方向的运动较为顺滑且稳定,在Y 方向的轨迹得出在机器人在25~35s 和65~75s 离开弯道进入直道,存在方向修正过程,反映了实际运行时由于惯性导致的移动机构在轨道中心的短暂偏离,在导轮的作用下又重新回到正方向,验证了机器人导轮拉簧设计选型的合理性.
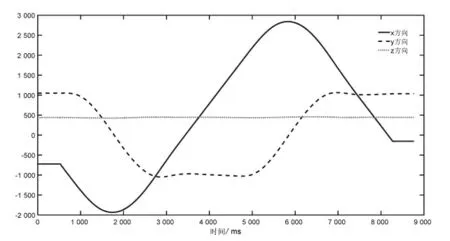
图16 样机质心运动轨迹Fig.16 Motion track of prototype centroid
综上实验表明,隧道机器人在ADAMS 仿真模拟的情况下选择的电机扭矩、机械结构设计以及导轮拉簧选型符合设计要求,隧道机器人拥有良好的运动性能和较高的稳定性.
4.2 伞形折展机构轨迹实验
伞形折展机构末端传感器世界坐标系X、Y、Z 三轴方向上的张开轨迹如图17 所示,X 方向上的位置变化为241.13 mm,Y 方向上的位置变化为159.1 mm,Z 方向上的位置变化为354.96 mm.相对移动距离为457.66 mm,通过15 次检测动作实验得到重复定位精度为0.04 mm.
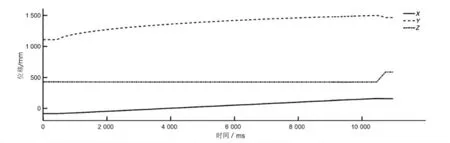
图17 伞形折展机构末端张开轨迹Fig.17 The opening track of the end of the umbrella folding mechanism
对比样机实验和仿真位移数据如表2 所示,得到样机与仿真数据相对一致,Y 方向误差最小,总位移误差仅为8.65%.结果表明,伞形折展机构满足受限空间的位置检测要求,拥有良好的工作性能.

表2 样机与仿真结果对比Tab.2 Comparison of trajectory displacement and simulation results of prototype
5 小结
所研制的受限空间隧道病害巡检机器人具有较强的环境适应能力, 轮式移动机构和伞形折展机构协调的方式可通过受限空间完成大范围、高效率的作业任务, 能够代替人员完成复杂环境下的病害检测,具备广阔的发展前景.
在多体动力学ADAMS 环境下,验证机器人在轨移动稳定性以及伞形折展机构结构合理性,对机器人样机进行的实验,采用三维动态捕捉系统对机器人进行实验验证,在轨移动轨迹顺滑,无明显偏移现象,伞形折展机构实验运动位置数据与仿真误差仅为8.65%,且重复定位精度为0.04 mm,表明机器人满足受限空间检测的工作要求,为隧道病害检测机构研究提供参考.
猜你喜欢
食品安全导刊(2021年20期)2021-08-30
农业装备与车辆工程(2021年8期)2021-08-28
电气化铁道(2021年4期)2021-08-28
装备制造技术(2021年1期)2021-05-21
南方农机(2021年1期)2021-01-20
空间科学学报(2020年6期)2020-07-21
港口装卸(2020年3期)2020-06-30
空间科学学报(2020年6期)2020-01-08
环球时报(2019-12-05)2019-12-05
现代营销·理论(2019年10期)2019-09-10