智能网联汽车测试场平面布局设计研究
2023-08-11 07:35武汉软件工程职业学院湖北武汉市430205邹慧怡
石河子科技 2023年4期
(武汉软件工程职业学院,湖北武汉市,430205) 邹慧怡
智能网联汽车内部具有多种先进的技术,其最终的目的在于完全替代人类手动驾驶,并提升乘坐的安全性与舒适性。对于智能网联汽车的测试,如果在实际的道路中进行,很可能会由于设计不够完备导致其周围的安全系数降低。因此,需要在封闭的测试场中,采用科学合理的设计,将各类现实要素纳入其中,尽可能保证测试结果的真实性。
1 智能网联汽车测试场设计的特殊性
1.1 自我操控与通信交流
与传统汽车测试场不同,对智能网联汽车进行测试的主要内容在于车辆在自动驾驶过程中的自我操控性,以及车辆是否能够全程保持安全可靠。为此,测试场需要具有多种路况特征。此外,智能网联汽车还需要完成网联化条件下信息的交流,以及车辆与道路之间的协调等内容。因此,测试场的设计应确保在不同道路的两侧安排多种设施。
1.2 拥堵场景的排队与跟驰
智能网联汽车在拥堵的情况下,会产生排队机制,从而需要对影响各类拥堵场景的排队状态等相关情境进行设计。同时,跟驰现象也需要被考虑,受到车道数设计、车道功能性的影响以及稳定流拥堵的影响,跟驰现象会对车辆起到延迟与制约的作用。因此,需要综合考虑这些因素的影响,以更好地评估交通系统的性能和设计出更优的道路交通方案[1]。
1.3 多样化场景中性能的稳定性
为了确保智能网联汽车能在城市道路交通中将自身的特性完全进行发挥,基于相关规范标准,从城市道路的平纵横线型、道路功能等多个方面予以系统性考量。前者包括各类道路、立交、匝道等,后者包括各类公共设施等。这些交通场景的设计需要考虑智能网联汽车的特点和需求,以确保其能够在这些场景下安全、高效地行驶[2]。
2 智能网联汽车城市道路测试场平面布局设计策略
2.1 工程概况
某智能网联汽车测试场的总规划面积为1.5km2,设计总长度为1.5km,设计总宽度为1km。在本测试场的设计中,共设置了四个不同方向的车辆出口和车辆入口。
2.2 整体道路设计
根据城市道路工程设计标准等文件中对道路等级的分类情况,在测试的过程中应该对主干道路、次主干道路、支路、快速路等场景进行设计,并且,按照功能性方面的需要,对多种断面道路场景进行设计。具体来说,在基础的道路测试场景中,设计的时速为60km/h,弯道曲率半径的最小值为120m;在快速路测试场景中,设计的时速为100km/h,弯道曲率半径的最小值为400m。对于车道线,按照道路交通法规的要求进行设计,即黄色或白色的实线或虚线。
2.3 不同车道数量的道路设计
针对本测试场中双向2/3/4/6/8车道,也要按照不同的方式进行设计,使智能网联汽车在行驶的过程中,能够对不同场景下的自我操控、通信交流、以及排队与跟驰等情况进行测试。具体来说,双向2车道容易产生拥堵情况,因此其主要负责测试车辆跟驰,并加入速度与车道的保持、靠边停车等方面的测试内容。其直线与无加速条件下的弯道的设计时速为60km/h,有效长度的最小值为600m,同时,无加速条件下的弯道的曲率半径的最小值为120m。
其中双向4车道由于道路较宽,具备超车条件,因此除了以上测试内容外,还要负责超车与并道方面的测试。同时,大多数快速路的车道数最少为双向4车道,因此在该场景下,可以开展快速路的场景测试。在这一情况下,为了防止车速过快、车道过短而导致测试结果的有效性降低,因此,直道的有效长度的最小值为600m,无加速条件下弯道有效长度的最小值与之相同。其中,二者的主要测试范围在于公交专用道、非机动车专用道等方面的测试[3]。
2.4 匝道设计
在匝道的设计方面,在城市道路中,主要的场景为平面型十字交叉立交与组合型互联互通式立交两种,因此,在本测试场的平面设计中,要按照这两种立交的形态对匝道进行设计,主要包括负责左转弯的环形匝道、负责右转弯的平面交叉匝道与单曲线匝道等,在设计的过程中均要符合道路交通工程设计标准文件中的要求。
2.5 其他方面的设计
通过设计,能够对掉头位置的感应、掉头措施的判断、来车避让等方面进行测试,有效长度的最小值应为800m左右,便于整体化开展掉头的测试。在自动泊车的测试方面,主要分为平行车位、垂直车位、斜排车位等,当车位的长度为5m,则宽度设计为3m,如果长度为10m,则宽度设计为4m,以保证符合大多数车辆的情况。其中,如图1所示,斜排车位的倾斜角度应设置30°、45°、60°多种,以满足多种场景。
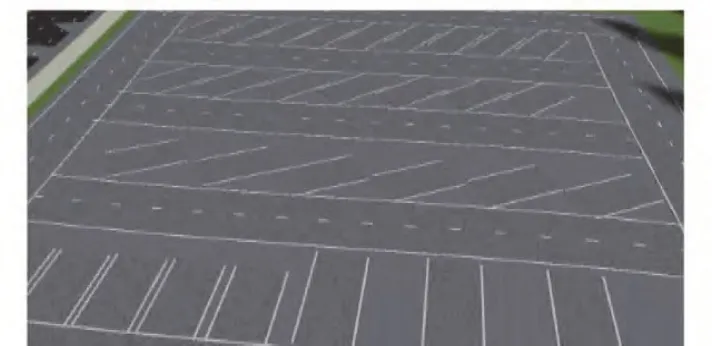
图1 斜排车位仿真模拟设计效果图
3 设计结果与验证
3.1 设计结果
结合以上的设计要点,本智能网联汽车测试场最终设计了一条主干道路、一条次主干道路、一条快速路、一架互联互通型,包含三个岔路的立交、以及一条隧道和一条环形道路。同时,在测试场中设计了10个交叉路口。此外,测试场中还包括一座平行式停车场和一座斜排式停车场、一条步行街、若干个市中心交叉口,以及地铁站、公交站、学校、加油站等,并按照要点中的规格对设计的效果进行进一步明确,以保证测试场的设计尽可能地符合城市的实际状况。
3.2 仿真验证
为了验证设计方案的有效性,本文利用仿真系统对测试场进行建模。仿真系统中包括道路设计元素,通过对这些要素进行组合设计或改变模型参数,能够对各类要素的各部分进行几何搭建,从而实现交通路网的整体化布局及其几何结构的实体化建模。智能网联所需的网联化环境,可通过仿真系统联合数字软件,对毫米波传感器、激光雷达、摄像头等进行仿真建模,通过计算分析,获取测试期间的动力学信息。通过对仿真验证的结果进行分析,能够反映出测试场是否能够有效开展测试。
4 结论
在对智能网联汽车进行测试的过程中,如果城市道路的测试场没有得到科学有效设计,则会导致智能网联汽车投入使用时,无法应对复杂的环境,并增加安全风险。为此,在对测试场进行平面设计时,首先要进行科学化的场景分类,其次要掌握设计布局的要点,并及时开展仿真验证工作,以保证测试场设计的有效性。
猜你喜欢
中国交通信息化(2022年7期)2022-10-27
中国交通信息化(2020年4期)2021-01-14
汽车画刊(2020年5期)2020-10-20
祝您健康·文摘版(2020年3期)2020-04-09
中国交通信息化(2018年11期)2018-03-01
现代家长(2018年11期)2018-01-05
武汉理工大学学报(交通科学与工程版)(2015年5期)2015-12-05
城市道桥与防洪(2014年8期)2014-02-27
城市道桥与防洪(2014年2期)2014-02-27
城市道桥与防洪(2013年8期)2013-03-11