基于数字孪生的压铸机器人模型构建与演化
2023-08-08 04:03侯远韶
安阳工学院学报 2023年4期
侯远韶
(河南工业贸易职业学院 机电工程学院,郑州 451191)
模型作为智能制造活动不可或缺的因素发挥了无法替代的作用,传统的实物模型面对物理对象时仅仅实现了简单的复制,在时间尺度以及空间尺度上不能很好地描述时间对于物理对象的影响,以及物理对象复杂的内部结构,具有一定的时空局限性[1]。随着信息技术以及计算机辅助功能的发展,利用数字技术建立物理模型的数字化应用,可以很好地解决物理模型的时空局限性[2]。数字孪生技术在物理模型的基础上,进行数据分析以及虚拟仿真搭建一对一的现实映射模型,并利用编程语言将物理现象与虚拟数字结合,实现物理对象的多维特征描述,达到虚拟数字模型与物理对象的共生,从而对物理实体进行仿真、辅助决策和运行诊断[3]。但如何构建具有一定通用性的数字孪生模型缺少相关的理论体系和建模准则,本文在前期相关工作的基础上设计了一种面向压铸机器人现场的数字孪生数据采集与处理系统为压铸机器人提供数据基础,并在数字孪生平台构建模型,最终通过研究压铸机器人数字孪生模型的运行状态以及辅助决策功能,验证模型的有效性[4-5]。
1 数字孪生理论分析与框架设计
1.1 数字孪生理论分析
数字孪生是指对物理模型的数字化表示,通过对感知技术、建模以及数据计算,系统性地实现信息技术与物理对象的交互融合,进而对物理模型实现描述、诊断以及决策分析等[6]。数字孪生的运行需要数据进行驱动,因此实时有效的真实数据是数字孪生的基础,确保数字孪生与物理模型的准确映射;数字孪生模型要求具有实时同步,能够及时的反映物理对象的状态,动态地描述物理对象以及持续动态跟踪;高度保真性,数字孪生以物理对象为主体,通过映射描述物体的运行机理,还原几何结构对象,物理框架与孪生模型称为数字双胞胎[7];互相关联性,单一模型的数字孪生对物理模型仅仅进行数据检测,孪生模型与物理框架间是单向映射,无法对物理模型进行反馈指导,面向对象的数字孪生模型,一方面受物理对象数据驱动,另一方面对物理对象进行状态检测以及数据分析,实现故障提前预警分析做出改变[8]。数字孪生模型涉及多方面知识,具体如图1 所示。
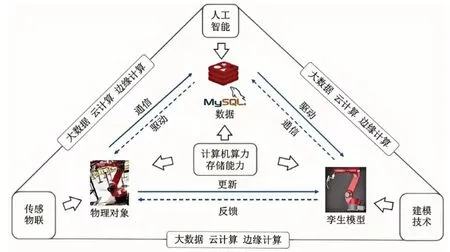
图1 数字孪生建模实施框架
1.2 压铸机器人数字孪生框架设计
通过分析压铸机器人功能参数和数字孪生框架,结合压铸工艺过程,在保证研究方向准确性的前提下,分析压铸机器人数字孪生对数据的要求以及数据的种类,针对不同类型的数据设计相应的数据采集计划,并结合对数字孪生功能的需求,将框架划分为4 个部分:(1)理论层,对数字孪生框架结构以及压铸机器人功能需求进行理论分析和概念辨析,构建设计方案;(2)数据层,确定物理模型所需数据种类,进而根据不同数据类型设计数采方案,继而通过传感器采集、人机交互等硬件采集终端,得到压铸机器人物理数据信息,并对采集的数据进行预处理和分类,动态模拟压铸过程,对模型进行验证和优化;(3)模型层,选择合适的孪生平台构建数字孪生模型满足数字孪生需求,在进行压铸过程中,充分考虑数字孪生环境下物理装配以及信息模型的需求,以压铸机器人本身三维模型出发,结合对数字孪生功能的具体要求,实现压铸过程中物理主体与数字框架的连接和映射,同时为了避免复杂物理本体建模带来的冗余计算,设计引擎利用物理实时数据驱动孪生模型的动态检测;(4)应用层,压铸机器人的压铸到应用作为一整套流程,通过结合数字孪生搭建虚拟环境,进行压铸质量预测,并根据不同参数比较分析,得到运行前、运行时的数据信息,进而在机器人进行压铸前确定最佳参数组合,保证物理框架与孪生模型的同步一致性,实现压铸机器人运行的精确性和鲁棒性[9]。压铸机器人数字孪生框架设计如图2 所示。
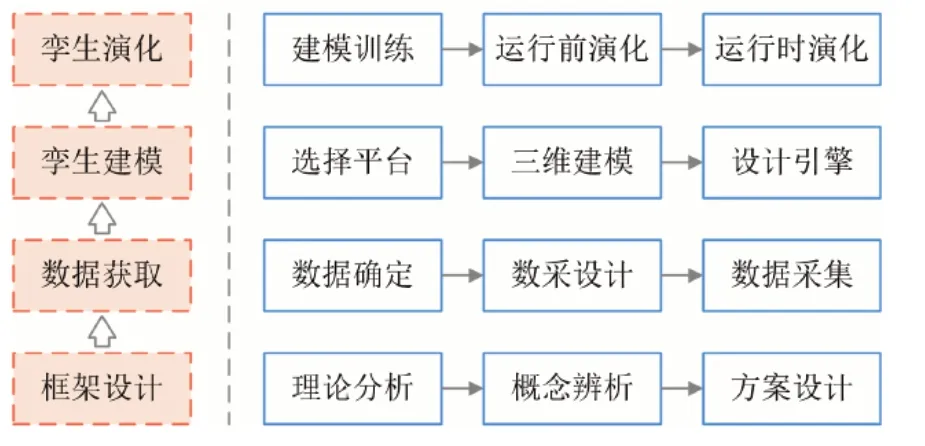
图2 压铸机器人数字孪生框架设计
1.3 数字孪生建模评价因子
数字孪生模型的性能指标需要通过评价因子进行检测,从而验证模型的准确性和有效性[10]。针对压铸机器人数字孪生模型的特点,本文通过以下评价因子进行模拟:
(1)模型虚实一致性。首先针对机器人几何模型,分析机器人的几何特征与拓扑结构,得到压铸机器人的物理数据,继而利用传感器采集、人机交互等硬件采集终端得到物理框架数据的一致性,针对压铸机器人运动特点,构建反映行为特征的状态图,建立机器人运动规则模型,从而利用压铸机器人几何特征得到物理数据,分析行为模式得到运动规则,验证模型的虚实一致性。
(2)准确性。主要包含构建数字孪生模型时采集物理实体几何特征创建的参数准确性A1,以及物理模型与数字孪生关联关系准确性A2,反映物理对象的状态,动态描述物理对象以及持续动态跟踪,同步参数的准确性A3。
上式中,r、m 分别为机器人拓扑结构中的维度数据,l1为物理模型参数量,l2为建立映射规则模型参数量,l3为物理模型同步参数量,l4为映射行为模型参数量,同时为了降低误差创建归一化函数f,将误差控制在[0,1]之间,分别代表压铸机器人目标模型与孪生模型间创建参数、同步参数、关联参数的误差值。
(3)高效性。对压铸机器人进行数字孪生建模时,通过采集大量的原始数据信息将物理框架与数字技术间建立映射,为了降低计算复杂度同时减少对硬件系统传输能力和算力的过度依赖,需要对模型的有效性进行优化,从而使数字孪生模型尽可能的简易,提高模型的性能,模型高效性A4
式(4)中,wij为维数模型架构所占数字孪生模型权重,n 为模型参数个数,lj 为基于数字孪生压铸机器人模型第j 层参数个数。
(4)通用性。数字孪生不仅可以应用于简单的目标对象,还可以应用于复杂的模型,具有迁移复用和重构优化的通用性,可以使数字孪生模块与多个对象之间进行灵活的配置和组合。因此,通过求解数字孪生模型伸缩性函数A5,可以提高系统的通用性。
式(5)中,m1和m2表示数字孪生框架是否可以拓展与删减,取值分别为0 和1,w1和w2表示m1和m2所占数字孪生模型权重,取值范围为 [0,1]。
2 数字孪生机器人多维模型构建
2.1 数字孪生机器人建模要求及内容
基于数字孪生的压铸机器人物理参数数字化建模要求:
(1)具有层次性。数字孪生机器人模型由多个运动部件组成,通过3D 模型绘制调整各个模型之间的关联进行整合优化,得到明确的框架结构,从而对机器人进行深入分析,有利于后续框架更好地展示特征。
(2)面向对象性。在进行3D 模型绘制时需要以事实为依据且绘制的子模型应具有面向对象的属性,按照机器人本体进行模型搭建,提高机器人模型绘制的可靠性和灵活性,且面向对象的绘制方法可以对模型属性进行分析,进而实现特征数据融合。
(3)机器人图形用户界面(Graphical User Interface,GUI)显示,机器人状态数据的显示需要通过图形用户界面,以及显示参数的配置、运动控制数据,功能完善的GUI 可以在压铸机器人运动过程中实现数据的清晰传输、实施过程,直观地显示物理状态的数字化表示。
(4)平衡性。机器人物理形态进行数字化建模时,需要根据机器人运动特征采集大量的原始数据进行数字化,导致占用大量计算机内存和算力,因此需要在不影响建模效果的前提下对机器人材质和运动进行优化找到系统平衡性,降低对硬件系统CPU、GPU 的依赖。
(5)行为特性,机器人进行压铸时遵循运动角度、方向等运动规律,基于此构建的模型要遵循这一规律,建模时应加入物理属性参数,使得构建的子模型具有真实机器人的行为特性,提高机器人模型的真实感[11]。
2.2 数字孪生机器人模型构建基本流程
数字孪生需要对机器人实体进行准确的映射,同时对模型做深层次的迭代优化,本设计框架利用Solidworks 2021 强大的建模功能,3D MAX 2021 对模型的轻量化处理以及质感增强处理,降低计算机算力的要求,利用Unity3D 2021 对机器人模型进行外部渲染,降低对硬件系统CPU、GPU 的依赖,具体建模流程如图3 所示:
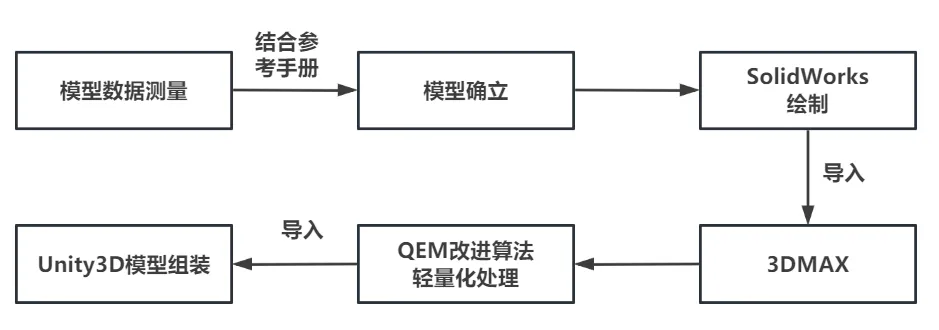
图3 压铸机器人模型构建基本流程
(1)利用Solidworks 2021 强大的建模功能,建立压铸机器人整体模型,保存相应的属性参数,如模型结构、大小。
(2)将构建的压铸机器人整体模型导入3DMAX 2021,为了提升模型整体的详细信息,通过点对点阈值分析以及QEM 算法,对三维模型进行分解,得到不含冗余数据的轻量级模型,降低系统冗余度的同时,保留机器人明显特征信息,提升算法的时效性。
(3)导出机器人不含冗余数据的轻量级模型,使用Unity3D 2021 对机器人模型相片信息、几何参数进行外部渲染,对机器人的三维模型进行二次编辑。
2.3 孪生数据驱动的机器人压铸过程动态建模
孪生模型作为数字孪生的核心包含压铸机器人三维模型,在此基础上分析了数据驱动引擎;作为数字孪生的载体,不同孪生平台有各自的特点以及适用场合,本设计采用基于压铸机器人构建的孪生平台Blender,但由于前期构建的模型缺乏数据驱动,只能对物理模型进行静态描述,不能随物理模型的变化而动态适用,因此不属于真正意义上的数字孪生模型[12]。本节将设计实现孪生数据驱动的机器人压铸过程动态建模,使用实时采集的物理模型数据作为三维模型的引擎驱动三维模型实时动态改变,建立真正的数字孪生模型,具体流程如下:
(1)通过多个传感器感知压铸机器人建模过程并进行信息融合。采集机器人模型数据是压铸过程物理模型搭建的前提和根本,本设计通过边缘协同数据收集构建环境模型,从而对压铸模型动态感知。
(2)压铸过程动态模型构建。提取机器人模型特征数据,建立物理模型与数字映射的动态分析机制,从而构建准确的机器人压铸动态变化原理框架,并通过调整动态优化,实现数字孪生模型的动态优化。
(3)压铸过程动态迭代演化。根据压铸机器人实际运动模型进行迭代更新,在实现自感知、自迭代的基础上,对数字孪生演化分析,从而实现孪生模型由采集到的实时数据驱动伴随机器人物理模型动态演化,得到机器人物理实体实时的状态变化,实现机器人压铸过程动态建模的高保真性,进而利用数字孪生为压铸机器人提供分析、判断、决策功能。
3 压铸机器人数字孪生状态检测实验及数据应用
3.1 压铸机器人数字孪生状态检测
(1)压铸机器人轨迹状态检测。通过观察压铸机器人6 个关节的压铸轨迹,保证机器人的自主运动,进而检测压铸机器人物理模型。
(2)GUI 端实时数据检测。利用Unity3D 2021 对机器人模型进行外部渲染,搭建服务器以及图形用户界面对机器人压铸过程进行数据跟踪,数字模型跟随机器人实体实时改变。
(3)实时数据记录。对机器人压铸过程产生的数据进行记录和保存。
3.2 压铸机器人数据应用验证
(1)建立机器人仿真模型。通过建立机器人运动学坐标系,对压铸机器人的正运动学和逆运动学进行分析,继而推导出压铸机器人的姿态变化以及末端位姿最终计算出机器人运动路径。压铸机器人仿真模型经Solidworks 仿真如图4 所示。
图4 压铸机器人仿真模型
(2)模型更新与数据交互。为了保证数字孪生系统决策的时效性和压铸过程的有效性,需要通过及时更新模型数据交互参数,以及对物理模块与数字孪生间数据准确交互,实现动态跟踪。
(3)数字孪生运行演化。利用演化思维校对数据在宏观、微观层面的有效性以及驱动数据的动态更新,验证应用于更新数字孪生模型数据的准确性,利用数字孪生的诊断作用,实现数字孪生对压铸机器人的实时稳定检测。
3.3 实验与仿真
为了验证本文所提方法基于数字孪生的压铸机器人模型构建与演化,能够满足实时性和动态性的要求且具有其他优势,与其他模型如压铸机器人能力建模(IRCMA)、DH 参数建模的平均误差、工作率、可拓展性以及更新延时进行比较,具体结果如表1所示。

表1 建模效果比较
通过比较分析可知,基于数字孪生的压铸机器人模型构建与演化在路径平均误差、工作率上都明显优于其他模型,且具有较高的可拓展性、应用范围较广,更新延时低能够实时对物理模型进行动态跟踪,使得数字孪生具备对压铸机器人预测分析、决策的功能,提高了系统的灵活性。
4 结束语
数字孪生功能的实现是以数字孪生模型建立为基础的。为使数字孪生能对物理模型进行故障预警决策且在进行离线分析时不依赖实际系统,具有较好的稳定性和动态追踪效果,本文在分析数字孪生理论的基础上,设计了压铸机器人数字孪生模型构建,根据模型评价指标对孪生数据驱动的机器人压铸过程进行动态建模,克服传统模型的数字孪生对物理实体仅仅进行数据检测的缺点,最终通过建模效果在平均误差、工作效率、可拓展性以及更新延时上的比较,验证了本模型的有效性及鲁棒性。
猜你喜欢
卫星应用(2022年7期)2022-09-05
卫星应用(2022年3期)2022-05-23
卫星应用(2022年1期)2022-03-09
小资CHIC!ELEGANCE(2022年1期)2022-01-11
中学生数理化(高中版.高考理化)(2020年11期)2020-12-14
数学物理学报(2020年3期)2020-07-27
环球慈善(2019年6期)2019-09-25
电子制作(2018年17期)2018-09-28
通信电源技术(2018年5期)2018-08-23
法大研究生(2017年1期)2017-04-10