
精英举重运动员级别调整的关键技术特征变化研究:以石智勇69/73 kg级抓举为例
2023-08-07 00:52:30但林飞李建设石智勇闫家祥顾耀东
中国体育科技 2023年7期
但林飞,李建设,石智勇,闫家祥,顾耀东
举重是奥运会最古老的项目之一,1896年首届奥运会就被列为正式比赛项目,也是我国的传统优势项目。在中国举重队成绩的背后,得益于“训练-科研-保障”一体化的专项科学竞训监控(陈小平, 2018)。20世纪80年代,我国学者就开始采用高速摄影、三维测力及同步技术等生物力学手段对举重技术特征进行了探究(李岳生等, 1981; 王云德 等, 1984)。其中,因运动学参数采用非接触式测量方法,可以在比赛场景下采集数据,因而被广泛应用于动作技术诊断。关于抓举,我国学者总结出“近”“快”“低”“准”的技术原则,“近”指杠铃重心上升过程中须靠近人体重心;“快”指依靠伸膝伸髋发力提升杠铃上升速度;“低”指积极主动身体下蹲尽量降低杠铃回落距离;“准”指发力部位和节奏准确,提铃以伸膝为主,发力以伸髋为主(刘北湘 等, 2008;秦硒, 1998)。抓举不仅是绝对力量的反映,更取决于神经-肌肉-骨骼整合系统对动作完成的控制,因此可引入连续相对相角(continuous relative phase,CRP)作为评价神经肌肉对动作控制的运动学依据(林辉杰 等, 2012; Davis et al., 2019; Romanazzi et al., 2015)。
国际举联对2024年巴黎奥运会举重项目的级别进行了重新界定,将原14个级别缩减至10个级别,这就意味着有些运动员将不得不进行体质量级别的调整,而体质量级别调整对精英运动员是巨大的挑战,体质量增大需要运动员追求更大的杠铃重量,体质量降低必然导致运动员肌肉量的流失和绝对力量的下降,两者都可能导致举重技术的变化。石智勇(以下简称“石”)是2016年里约奥运会和2020年东京奥运会2届奥运会冠军,其体质量由69 kg级增大至73 kg级,在不同体质量级别上蝉联奥运冠军,是我国乃至世界举坛不可多得的成功案例。对石体质量级别上调前后的抓举技术进行生物力学分析诊断,既可为其个人巩固在新级别的技术优势提供科技支撑,又可为其他优秀运动员上调级别提供技术参考。
1 研究对象与方法
1.1 研究对象
以石2个体质量级别的抓举技术动作为研究对象,2016—2020年分别以69 kg级和73 kg级参赛的信息如表1所示。

表1 石智勇2016—2020年参赛信息Table 1 Participation Information of SHI Zhiyong from 2016 to 2020
1.2 研究方法
1.2.1 定点定焦摄像法
在2016—2020年中国举重队重大比赛现场,采用2台摄像机(SONY,日本)分别固定于举重台前方的左右两侧约45°方向上,2台摄像机距离举重台中心约15 m,在水平面上通过举重台中心主光轴之间的夹角约90°,拍摄频率为25帧/s,同步采集完整的抓举技术动作。拍摄前,预先采用PEAK三维标定框架对比赛场地进行三维空间坐标标定,标定后的拍摄过程中保持摄像机位置和焦距等拍摄条件不变(图1)。
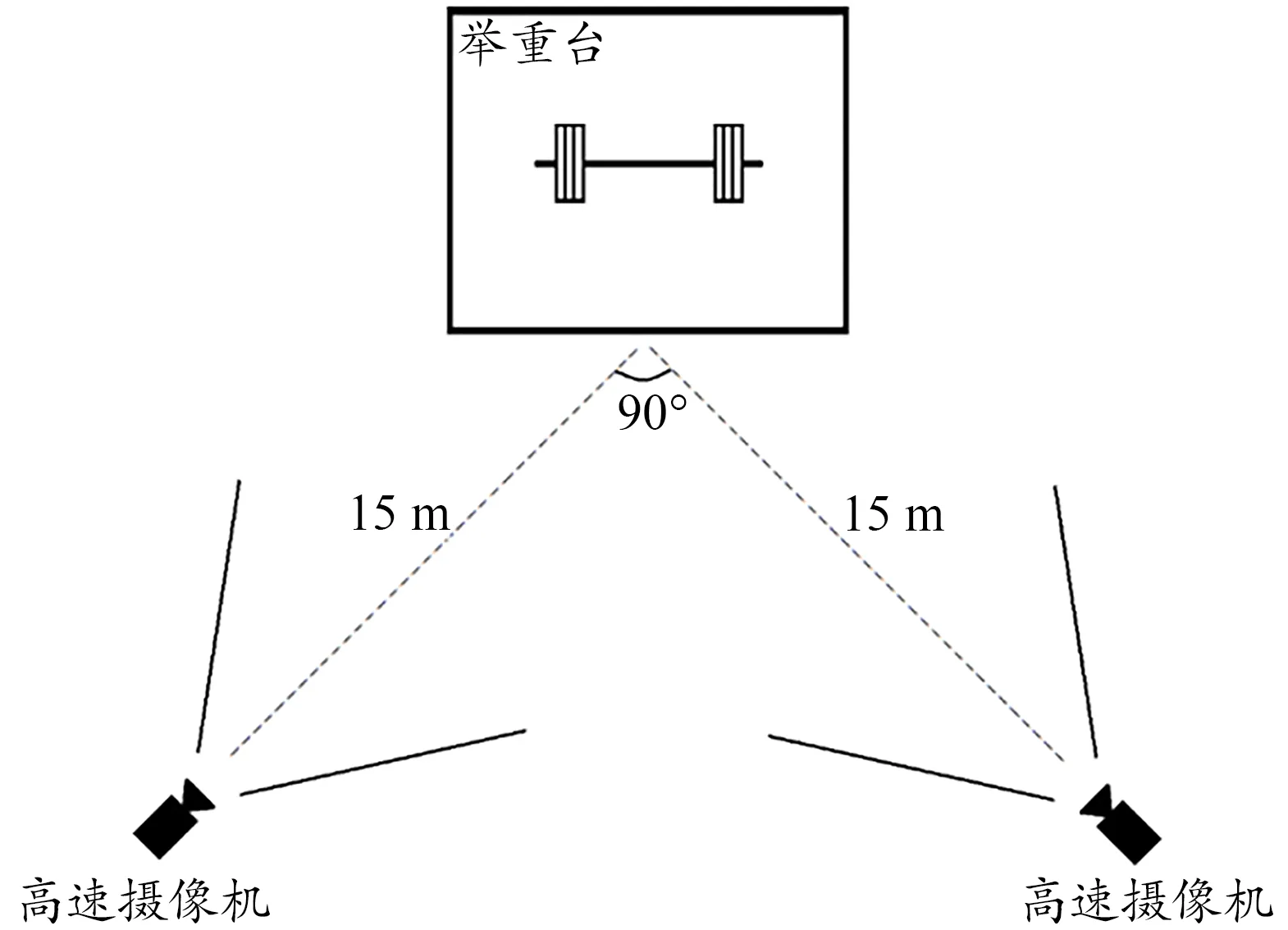
图1 摄像机现场设置示意图Figure 1. Schematic Diagram of Camera Site Setup
1.2.2 三维录像解析法
采 用SIMI-Motion7.50(SIMI Reality Motion Systems GmbH,德国)三维运动解析系统对视频进行处理,解析的采样频率为50 Hz,运用截断频率为6 Hz的低通滤波对原始数据进行平滑处理,使用DLT计算空间坐标(图2)。三维坐标系X轴为前后方向,Y轴为左右方向,Z轴为垂直方向。确立17个关键环节标定点包括头、左右肩、左右肘、左右腕、左右髋、左右膝、左右踝、左右脚尖和杠铃左右端点建立人体模型。
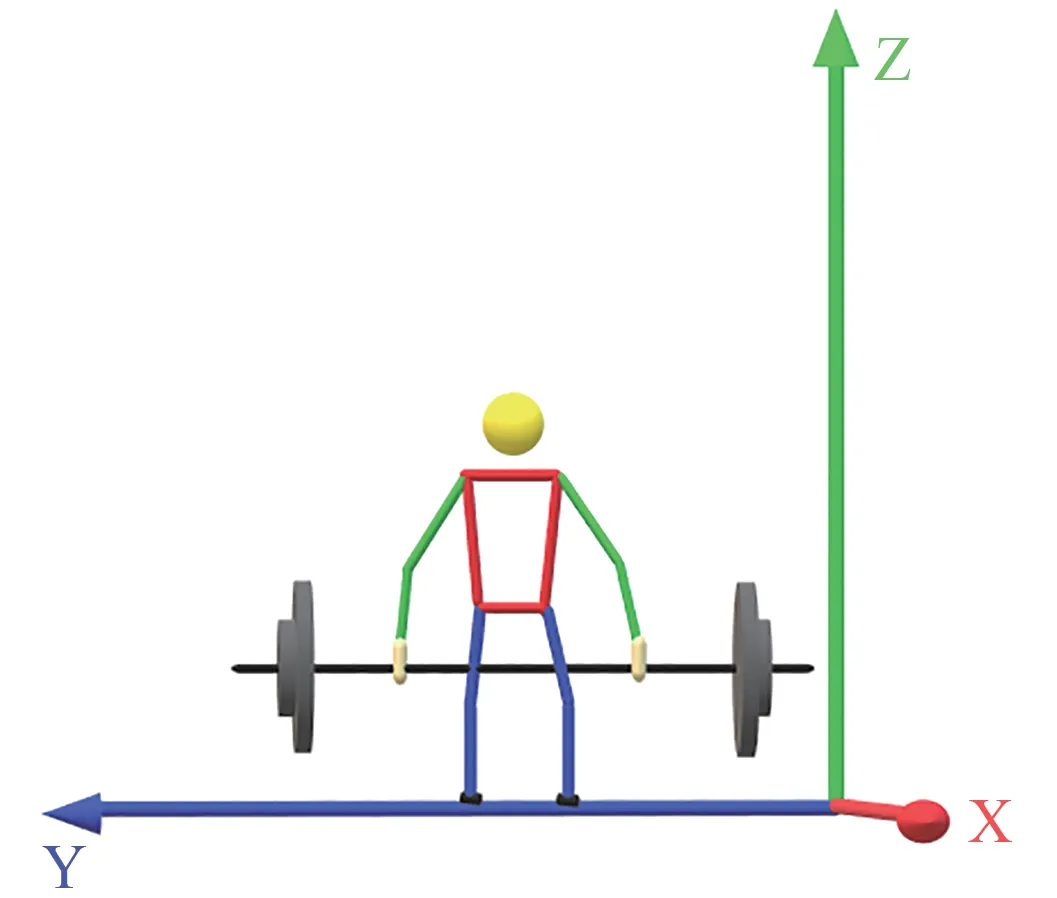
图2 三维运动分析直角坐标系示意图Figure 2. Schematic Diagram of the Cartesian Coordinate System for 3D Motion Analysis
1.2.3 下肢协调性
采用MATLAB软件(Mathworks,美国)分别对石69 kg、73 kg级数据进行处理,将解析所得运动学参数进行线性插值至时相100%。将下肢关节角度、角速度依据最大值、最小值标准化至+1~-1[公式(1)、(2)]。
将标准化后的关节角度、角速度带入公式(3)计算相角值。
同时,利用近端关节值减去远端关节值得出CRP[公式(4)]。
为定量评价抓举过程中关节间协调性,引入相对相位角均值(MARP)[公式(5)]。
引入抓举各个阶段内的相对相位角变异系数(DP),对各个关键环节内下肢关节间动作的稳定性进行量化[公式(6)]。
式中,θ代表关节角度,ω代表关节角速度,i代表抓举过程中某一时间点,选取抓举过程中P为时间点个数。
1.2.4 统计方法
使用SPSS 24.0进行统计分析,MARP和DP用平均值和标准差表示(M±SD)。采用独立样本t检验对2个级别MARP、DP进行检验,统计学显著水平设置为α<0.05。
2 抓举阶段划分
划分动作结构是抓举技术诊断的首要工作环节(金季春 等, 2020),根据抓举过程中的杠铃运动学参数和下肢关节角度变化,国内外学者多将完整的抓举动作划分为4~6个连续的动作阶段(刘功聚 等, 2019; 王雷等, 2011; 朱厚伟 等, 2017; Nagao et al., 2019)。为便于分析抓举过程中的力学原理,结合石个人技术特点,本研究将抓举动作划分为6个阶段(图3):M1伸膝提铃阶段(图3a→b)、M2引膝提铃阶段(图3b→c)、M3伸髋发力阶段(图3c→d)、M4惯性上升阶段(图3d→e)、M5制动接铃阶段(图3e→f)和M6接铃完成阶段(图3f→g)。
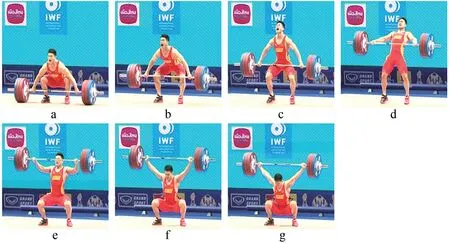
图3 抓举动作各阶段划分时刻特征画面Figure 3. Characteristic Screen of Each Stage of The Snatch Action
3 结果与分析
3.1 准备姿势参数分析
准备姿势的合理与否将直接影响发力的效率,合理的准备姿势是成功抓举的前提(但林飞 等, 2019)。本研究采用相对握距及相对站距计算方法(相对握距=握距÷臂展长度×100%,相对站距=站距÷下肢长度×100%),算得石69 kg级时的相对握距为60.24%、相对站距为56.70%,73 kg级时的相对握距为61.32%、相对站距为73.80%。相较于原级别,73 kg级时石的相对握距增宽1.08%(表2)。握距增宽有利于降低提铃所需送达的最终高度,且宽握距便于下蹲时重心的降低,但增宽的握距将对运动员固肘肌群的力量提出更高要求。相较于握距,73 kg级时石的相对站距变化更为明显,相对站距增宽17.10%。站距的增加将降低直立撑铃的最终杠铃高度,减小直立撑铃阶段的做功,且双足构成的支撑面更大,但过宽的站距可能会增加膝关节损伤的风险(吴紫莹 等, 2021)。

表2 石智勇69 kg级和73 kg级准备姿势参数表Table 2 SHI Zhiyong 69 kg and 73 kg Weight Class Prepare Posture Parameters
在抓举准备姿势控制中,双手锁握目的是增加握杠的牢固性(Musser et al., 2014),抬头挺胸是为了调动腰背大肌群参与提铃发力(吴紫莹 等, 2021)。73 kg级时石的躯干前倾角度较69 kg级增加4.38°,躯干前倾的目的一是为了减小提铃的“两心”距离,缩短提铃过程中的阻力臂;二是为了增加伸髋肌群、躯干伸肌的提铃发力参与度(王向东 等, 2009)。下肢关节角度的姿态控制是技术分析的重点,一般称为准备姿势的臀位。臀位的高低由运动员的伸膝、伸髋肌群力量和身体形态差异所决定,膝关节角度>90°即为高臀位,膝关节角度<90°即为低臀位(李建英 等, 2010)。石在2个级别均采用低臀位的身体姿位,73 kg级时的下肢关节角度更小(表2)。从人体力学角度来看,较小的下肢关节角度可充分拉长伸膝肌群肌肉初长度,对伸膝肌群参与提铃发力更加有利(刘功聚等, 2019)。
3.2 杠铃运动学参数分析
M1阶段是用时最长的阶段,石在2个级别的M1阶段用时均超过整个杠铃上升过程总用时的50%。较69 kg级,73 kg级时石的杠铃垂直速度增大0.14 m/s,杠铃垂直加速度峰值增大0.64 m/s2(表3)。提示,73 kg级别时石的M1阶段可能存在发力过度的问题,但这需要结合下肢蹬伸发力效果进一步深入讨论。有研究认为,优秀运动员提铃发力过程大致存在2种杠铃运动学参数变化模型,杠铃垂直速度在M1~M3阶段内持续上升更符合能量经济性(朱厚伟 等, 2019)。相较于69 kg级别,73 kg级时石的杠铃垂直速度在M2阶段增加了1.7 m/s,符合杠铃垂直速度变化模型中更优异的运动表现。根据瞬时功率计算公式可得,石69 kg级时的峰值功率为4 023.22 W,73 kg级时的峰值功率为4 190.05 W,更大的峰值功率说明发力效果提升明显(王雷 等, 2011)。虽然69 kg级时石的杠铃加速度峰值要比73 kg级时大,但在引膝阶段存在明显加速度负值(图4)。M2阶段中,73 kg级时石的杠铃所获发力初速度远大于69 kg级,这可能是影响M3阶段杠铃峰值速度的重要原因。

图4 石智勇69 kg级和73 kg级杠铃运动学参数“时变图”Figure 4. SHI Zhiyong 69 kg and 73 kg Weight Class Barbell Kinematics Parameters “Time-Varying Diagram”
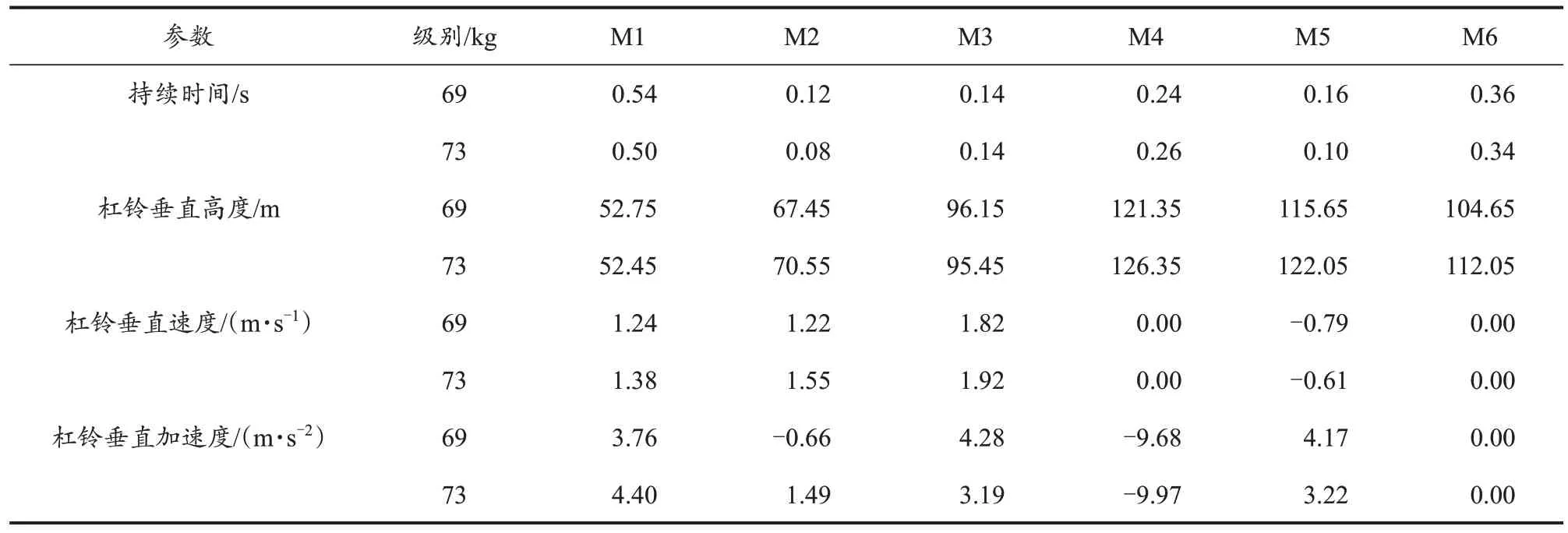
表3 石智勇69 kg级和73 kg级杠铃运动学参数表Table 3 SHI Zhiyong 69 kg and 73 kg Weight Class Barbell Kinematic Parameters
在M4阶段中,73 kg级时石的相对惯性上升用时较69 kg级时增加4%,杠铃推进距离增加5.70 cm,提示,73 kg级时石的甩臂翻腕对杠铃发力初速度利用更好。相对杠铃垂直高度峰值(相对杠铃垂直高度峰值=杠铃垂直高度峰值÷身高×100%)是影响抓举成功率的重要因素(刘功聚 等, 2019) ,石级别上调前后相对杠铃垂直高度峰值分别为72.66%和75.66%,均达70%以上。在极限抓举重量下,运动员身高(x)与杠铃垂直高度峰值(y)间存在线性关系:y=0.920x-0.295,由此可知,石在极限抓举重量下杠铃垂直高度峰值应为124 cm(朱厚伟 等, 2017)。根据所测数据,73 kg级别时的杠铃垂直高度峰值要高于该极限值,由此预测石的抓举成绩仍存在提升空间。接铃指标是影响抓举成败的重要因素,优秀运动员接铃用时和杠铃回落距离均小于普通运动员(刘北湘 等, 2008)。在接铃过程(M5~M6)中,69 kg级时石的杠铃垂直回落距离为16.70 cm、接铃用时为0.52 s,73 kg级时的杠铃垂直回落距离为14.30 cm、接铃用时为0.44 s,级别上调后石的接铃用时和杠铃回落距离均有所缩短(表3)。其中,73 kg级时石的制动接铃阶段用时缩短0.06 s,由此说明石级别上调后的接铃过程更加积极。M5阶段中,69 kg级时石的杠铃速度回落峰值为-0.79 m/s,73 kg级时为-0.61 m/s。有研究认为,杠铃回落速度越大,向下的冲量也将增大,这是导致接铃失败的重要成因(罗新功 等, 1997)。73 kg级时石的制动时间更短,杠铃回落速度峰值也更小,提示,石在下蹲接铃时的技术质量有明显提升。
3.3 下肢关节运动学参数分析
伸髋伸膝大肌群是2次发力过程中的“动力源”,在提铃发力阶段两大肌群又起着不同主导作用(但林飞 等,2021)。M1阶段中,69 kg级时石的髋膝踝角速度分别为156.25 (°)/s、250.75(°)/s、74.83(°)/s,73 kg级 分 别 为168.42 (°)/s、241.71 (°)/s、90.96 (°)/s,膝关节角速度快于髋踝关节角速度(表4)。该阶段中,膝关节是距离杠铃重心最近的关节,如果髋关节过早参与提铃发力,可能会影响腰背部大肌群参与引膝发力,也被认为是导致抓举失败的重要原因(Nagao et al., 2019)。在M2阶段中,69 kg级时石的膝关节回屈角度为11.23°,73 kg级为3.56°(表4)。73 kg级时石的引膝回屈角度比原级别小7.67°,原级别大幅度的引膝可能是造成杠铃上升过程中出现加速度负值的原因,在级别上调后的引膝技术明显改进。在M3阶段中,下肢蹬伸肌群应爆发出最大力量使杠铃上升速度到达峰值,下肢发力应以伸髋肌群发力为主,伸膝肌群发力为辅(但林飞 等,2021)。该阶段中,69 kg级时石的髋、膝、踝关节角速度峰值分别为409.16 (°)/s、459 (°)/s、323.73 (°)/s,73 kg级分别为413.80 (°)/s、504.62 (°)/s、374.18 (°)/s(表4)。2个级别石的伸膝角速度均快于伸髋角速度(图5),提示石的伸膝肌群参与下肢发力更多,建议关注其伸髋肌群力量。
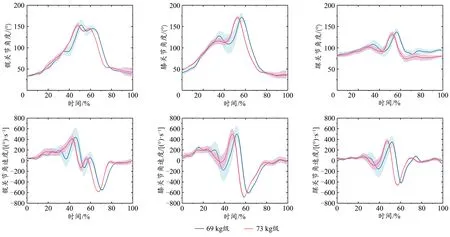
图5 石智勇69 kg级和73 kg级下肢关节角度参数“时变图”Figure 5. SHI Zhiyong 69 kg and 73 kg Weight Class Lower Extremity Joint Angle Parameters “Time-Varying Diagram”
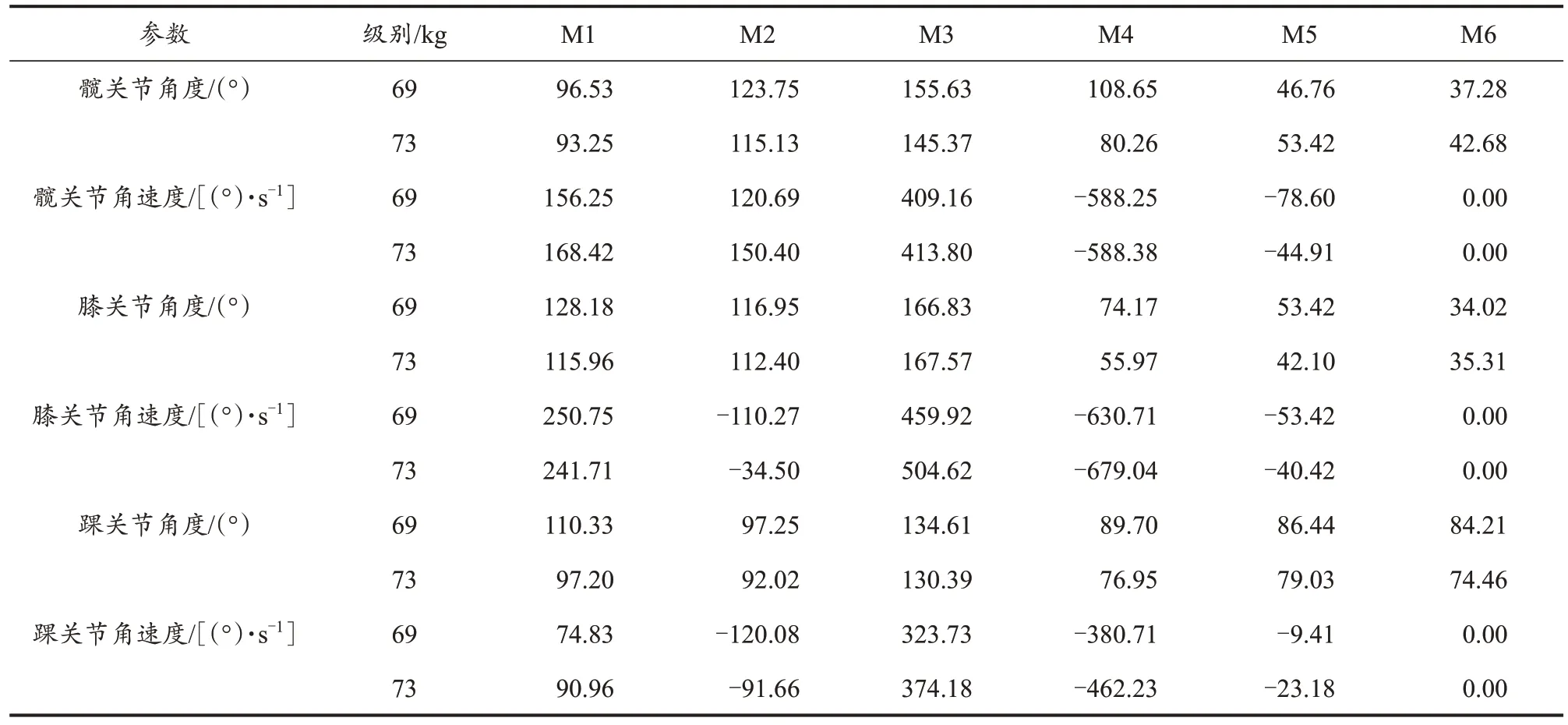
表4 石智勇69 kg级和73 kg级下肢关节运动学参数Table 4 SHI Zhiyong 69 kg and 73 kg Weight Class Kinematic Parameters of Lower Extremity Joints
在M4阶段中,运动员身体重心迅速下降以完成接铃准备,优秀运动员的身体重心下降加速度要大于重力加速度,即通过主动屈髋屈膝下蹲形成身体失重状态(王向东等, 2009)。该阶段中,69 kg级时石的髋、膝、踝关节角速度谷值分别为-588.25 (°)/s、-630.71 (°)/s、-380.71 (°)/s,73 kg级分别为-588.38 (°)/s、-679.04 (°)/s、-462.23 (°)/s(表4)。在2个级别中,膝关节回屈角速度最快,而踝关节回屈角速度最慢,说明主要由屈膝深蹲来降低身体重心。相较于69 kg级,73 kg级时石的膝踝关节回屈角速度更快,说明级别上调后屈膝深蹲更加迅速有力,伸膝肌群的抗离心收缩能力可能更强(图5)。接铃完成阶段,69 kg级时石的髋、膝、踝关节角度分别为37.28°、34.02°、84.21°,73 kg级分别为42.68°、35.31°、74.46°(表4)。2个级别均呈现出“屈髋屈膝”接铃,这是由运动员身体形态和技术特点所决定的(吴紫莹 等, 2021)。
3.4 抓举的稳定性参数
Rossi等(2007)研究了优秀运动员抓举过程中的杠铃重心运动轨迹,得出3种杠铃重心在矢状面的运动轨迹(图6)。在理想状态下,最优的运动轨迹应该是垂直于杠铃中线做直上直下运动。但人体并不是简单的机械杠杆系统,而是由骨骼、肌肉、韧带所组成的受高级神经活动控制的复杂运动系统。结合人体力学规律,最优的杠铃重心运动轨迹应呈现出“S”型(Mastalerz et al., 2019; Nagao et al., 2020)。有学者建立了抓举过程中的人体多刚体模型,通过对3种抓举模型的能量消耗计算,结果显示,图6b中的轨迹C可能是最为经济的杠铃运动轨迹(Lyons et al., 2017; Musser et al., 2014)。石在2个级别时的杠铃重心上升轨迹与轨迹C较为接近,符合优异的杠铃重心运动轨迹模型。但需注意的是,级别上调后石的提铃过程存在较为明显的杠铃重心前移,随后再通过引膝动作调整杠铃与身体位置(图7)。有研究认为,第一次发力过程中杠铃重心前移会增加提铃的机械功,不利于抓举的经济性(Nagao et al., 2020)。
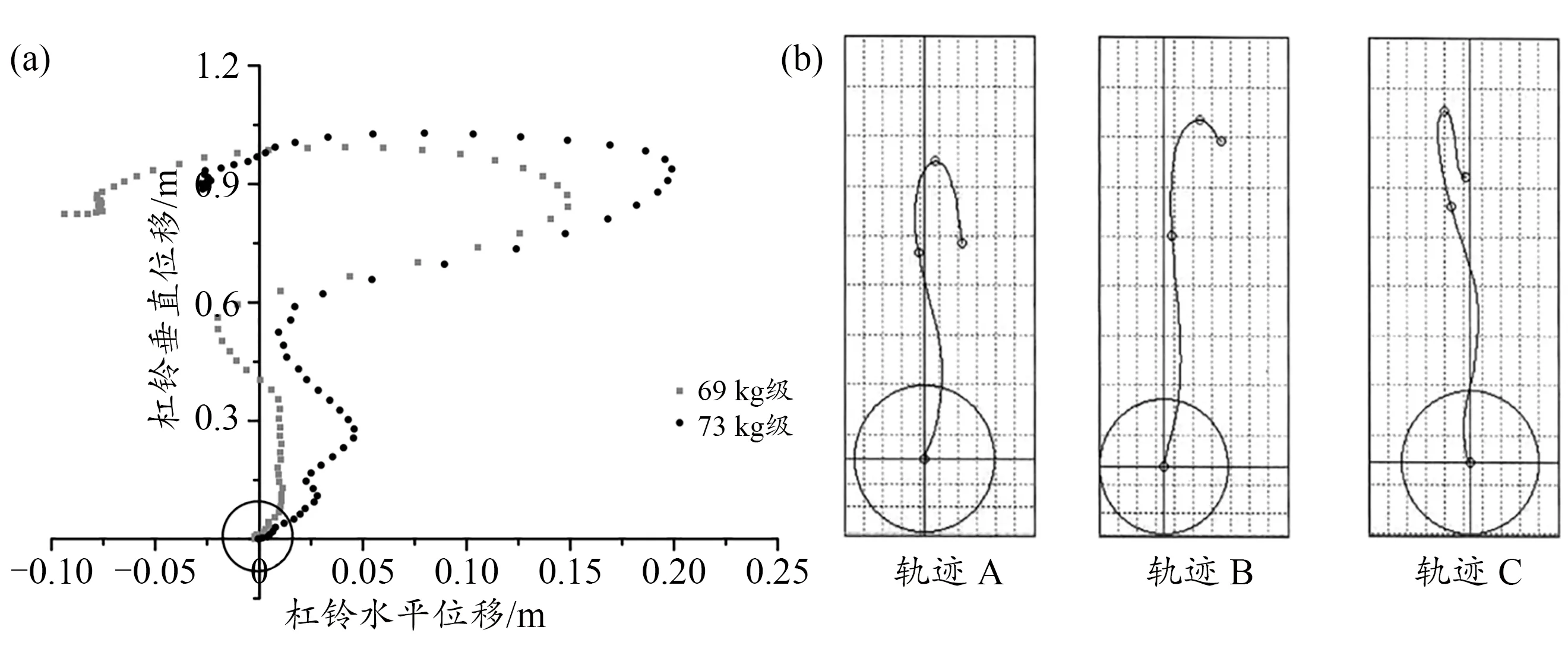
图6 杠铃重心在矢状面的运动轨迹Figure 6. Movement Trajectory of the Barbell Center of Mass in the Sagittal Plane
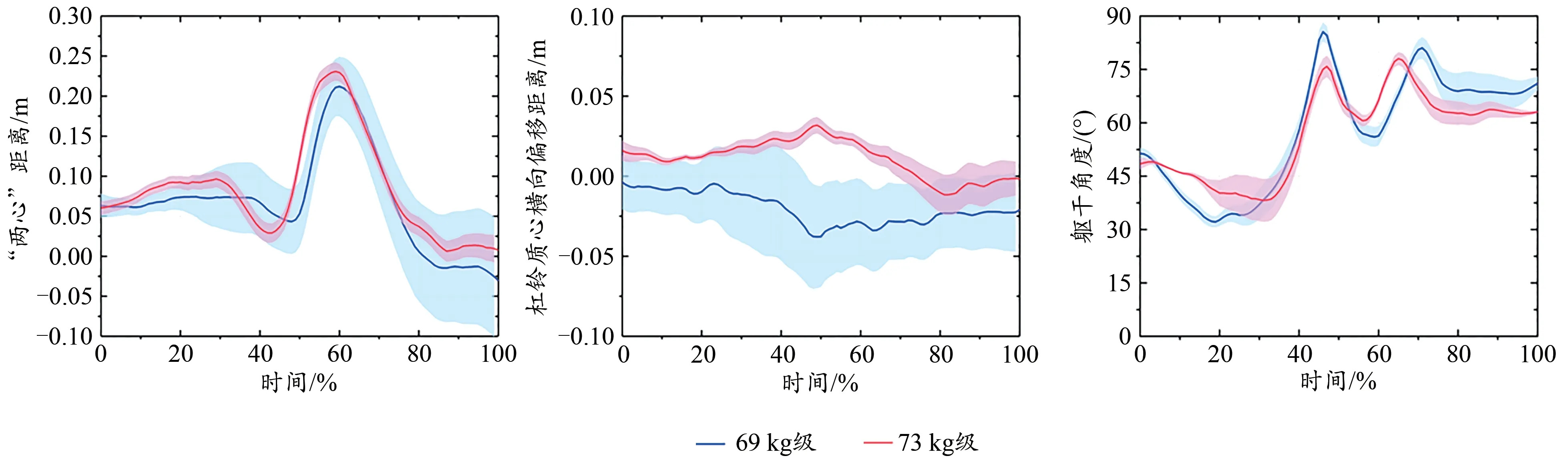
图7 石智勇69 kg级和73 kg级抓举稳定性参数“时变图”Figure 7. SHI Zhiyong 69 kg and 73 kg Weight Class Snatch Stability Parameters “Time-Varying Diagram”
在“两心”距离移动范围中,69 kg级时石的移动范围为22.20 cm,73 kg级为23.10 cm(表5)。有研究表明,优秀运动员抓举过程中的最大“两心”距离一般不超过20 cm(刘平 等, 2005; Liu et al., 2018),而石在2个级别中的“两心”距离均>20 cm,说明存在“两心”距离过大的问题,造成这一结果可能与翻腕提肘技术有关,建议石可以进行小公斤多次数的高抓、直立抓、悬垂抓等专项辅助动作的纠错练习。杠铃重心横向偏移是指杠铃重心在人体冠状轴上的偏移,代表左右方向上的平衡。69 kg级时石的偏移范围为3.70 cm,73 kg级为3.80 cm,2个级别的偏移范围均<4 cm(表5)。69 kg级时石M5~M6阶段躯干角位移为7.72 °,73 kg级为14.97°(表5),石级别上调后躯干前倾度增加说明接铃动作完成度高,腰背肌群参与支撑作用更大,有利于提升接铃过程的稳定性(刘平 等, 2005;Lyons et al., 2017)。原级别中躯干前倾度不够使背部肌群支撑不稳,可能是导致杠铃重心偏向身体重心后的重要原因。针对接铃过程躯干前倾度不足的问题,建议加强腰背部大肌群力量,进行次最大重量的抓支撑辅助练习。
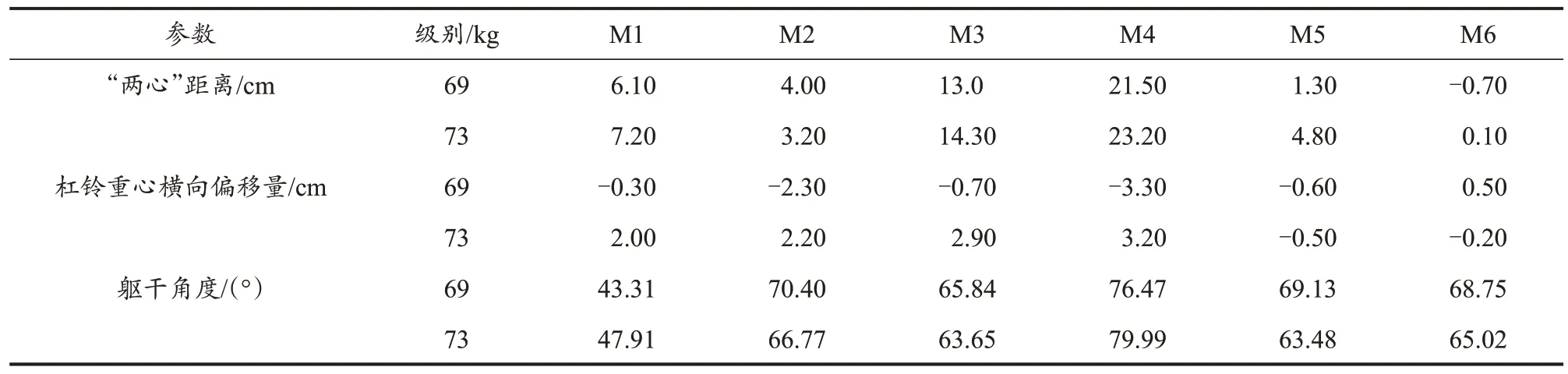
表5 石智勇69 kg级和73 kg级抓举的稳定性参数Table 5 SHI Zhiyong 69 kg and 73 kg Weight Class Stability Parameter of Snatch
3.5 抓举的协调性参数
发力指标是分析评价抓举技术优劣的重要依据(刘北湘 等, 2008),而发力效果取决于下肢主动肌、拮抗肌和协同肌的相互配合。CRP作为评价神经肌肉对动作控制的运动学依据,同相与反相的关节间协调特征被认为是一种相对稳定的动作控制策略,CRP越小表明动作控制稳定性越好(Davis et al., 2019)。对比2个级别的抓举过程,石的髋-膝、膝-踝关节间MARP均不存在显著差异,说明级别上调后的下肢关节间协调性无明显变化(表6)。有研究表明,髋-膝关节间MARP<30°,而膝-踝关节间MARP>30°,髋-膝关节间MARP越小则耦合性越强,发力协调特征越稳定(Davis et al., 2019)。DP越大说明关节间的协调性特征更加多变,下肢发力时的动作稳定性越差(Romer et al., 2019)。在73 kg级时石抓举过程中的髋-膝、膝-踝关节间DP均减小(表6),神经肌肉的控制稳定性更强(Khuyagbaatar et al., 2017)。由此可以认为,石在级别上调后,抓举技术较原级别更加固定,技术动作稳定性明显提升。
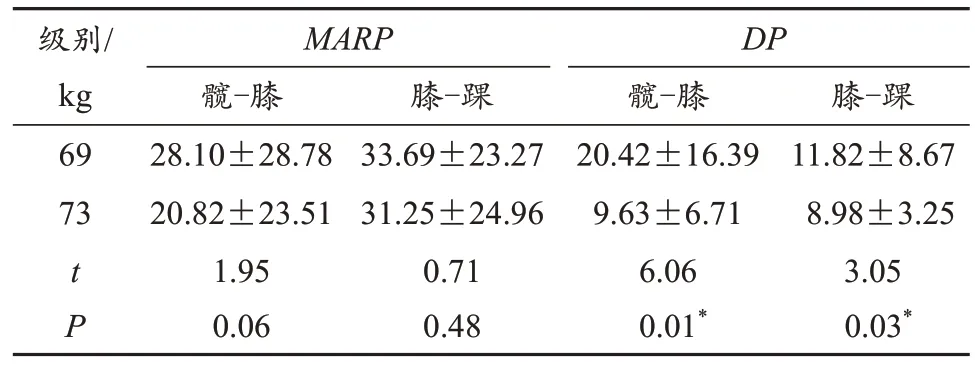
表6 石智勇69 kg级和73 kg级下肢关节相对相位角均值及变异系数Table 6 SHI Zhiyong 69 kg and 73 kg Weight Class MARP and DP of Lower Extremity Joints
抓举的2次发力过程中,不同阶段的下肢三大关节参与度也存在差异。下肢关节间CRP参数中,CRP为正值时代表近端关节引导远端关节,CRP为负值时代表远端关节引导近端关节(Park et al., 2021)。在M1阶段中,69 kg级时石的髋-膝关节间CRP更大,而73 kg级时的膝-踝关节间CRP更大,说明级别上调后石的伸膝关节占主导优势(图8)。这反映出石在2个级别时采用了不同的提铃发力策略,级别上调后的伸膝肌群参与提铃发力更多,提示石的提铃技术进行了明显的改进。M3阶段中,石在级别上调后的髋-膝、膝-踝间CRP均大于原级别(图8),说明髋关节逐渐起主导作用,伸髋肌群参与发力阶段更多。本研究结果与此前研究结论一致,提铃阶段以伸膝肌群发力为主,发力阶段以伸髋发力为主(但林飞等, 2021)。
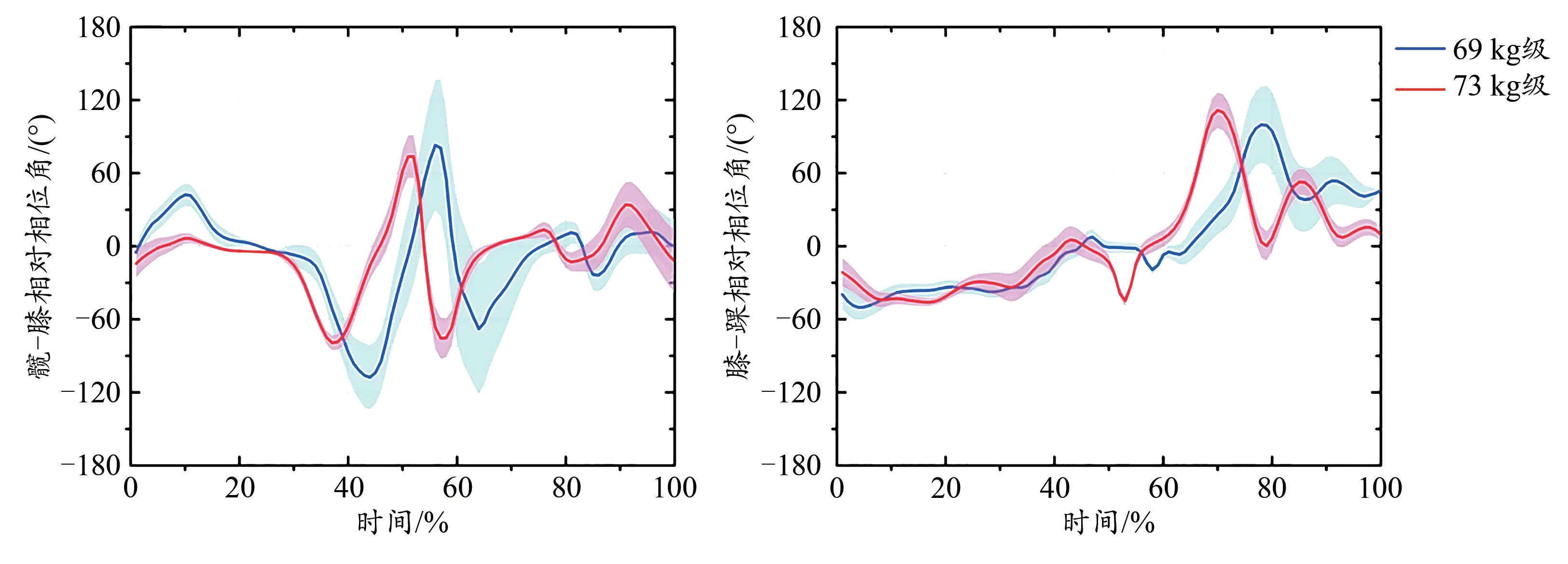
图8 石智勇69 kg级和73 kg级同侧下肢关节相对相位角“时变图”Figure 8. SHI Zhiyong 69 kg and 73 kg Weight Class CRP of Ipsilateral Lower Extremity Joints “Time-Varying Diagram”
4 结论与建议
4.1 结论
1)石在级别上调后,相对站距增宽,引膝过程的膝关节回屈幅度更小,下肢发力肌肉控制稳定性更强,抓举动作技术质量明显提升。
2)石在2个级别中,杠铃重心横向偏移参数均控制的比较理想,但“两心”距离移动范围均过大。
3)根据石杠铃最大垂直高度预测极限抓举重量,表明上调级别后的成绩仍有进一步提升的空间。
4.2 建议
1)石在2个级别中均出现“两心”距离过大和接铃不稳问题,建议加强其腰背部大肌群力量训练,进行高抓、直立抓、悬垂抓、抓支撑等专项辅助练习。
2)本研究仅对石级别上调前后的抓举技术变化进行了研究,但级别调整导致技术变化的生物力学机理,有待继续探究。
猜你喜欢
少年博览·小学低年级(2022年6期)2022-05-30 10:48:04
浙江体育科学(2022年3期)2022-05-08 09:22:28
运动精品(2022年1期)2022-04-29 08:58:08
太原理工大学学报(2019年1期)2019-03-05 05:13:52
人大建设(2018年10期)2018-12-07 01:13:54
领导决策信息(2017年42期)2017-12-15 03:34:58
领导决策信息(2017年12期)2017-05-17 04:49:17
反射疗法与康复医学(2017年7期)2017-01-16 01:11:02
农家书屋(2016年9期)2016-05-14 03:43:36
中学生英语·阅读与写作(2015年4期)2015-05-04 18:59:00
