
组合体飞行器安全分离走廊及其生成方法研究
2023-07-19 08:36潘一华张青松张金城蔡成志贾山
西北工业大学学报 2023年3期
潘一华, 张青松, 张金城, 蔡成志, 贾山,3,4
1.西北工业大学航天学院, 陕西 西安 710072; 2.南京航空航天大学航天学院, 江苏 南京 211106;3.深空星表探测机构技术工信部重点实验室, 江苏 南京 211106;4.航天进入减速与着陆技术实验室, 江苏 南京 211106
组合体飞行器作为一种符合特定作战任务需求的新概念飞行器,伴随着空中作战的现代化及任务目标的多样化应运而生[1]。其可通过组合、分离的方式,调整整机气动构型及作战单位数目,综合了大型无人机长航程及小型无人机机动灵活的特点,能够充分发挥整机及各组成单机的作战优势。对于组合体飞行器而言,空中分离过程作为其任务剖面中的最关键环节,其完成情况将直接影响分离后任务执行的效果。而由于分离问题自身非线性、非定常、强耦合等特性,使得得到该问题的精确解变得极为困难。因此,如何设计简单、快速且精度高的研究方法,对该问题进行简化,从而获得安全可靠的空中分离区域,并给出适宜的分离策略,成为该领域研究的关键。
目前,国内外针对单体飞行器空中分离的研究方法,根据流程区别,可以划分为直接预测方法(DPM)和间接预测方法(IPM)[2]。DPM类方法最早正式应用于二十世纪九十年代的美国,伴随着大规模高速并行计算机的使用,该方法由于精度高而受到关注[3]。而在国内,二十一世纪初,郭正等[4]首次应用DPM方法分析外挂物投放;刘周等[5]将重叠网格和挖洞的思想引入DPM方法,对其进行了修正;铁鸣等[6]将该方法程序化,汇总成一种用于多学科耦合联动仿真的系统;董杨彪等[7]对该方法进行了改进,引入了分阶段网格重构的思想,改善计算效率,提高计算精度;蒋崇文等[8]基于该方法,提出了一种网格扰动域的更新方法,既提高了网格装配的效率,又有效地避免了“孤点”问题在多体分离动力学分析中的影响。IPM类方法最早应用于美国宇航局建立的NEAR系统[9],该系统采用简单的细长体理论,主要用于飞行器外挂物的分离分析。随后,该方法被国外诸多研究多体分离动力学的学者所采用和发展。在国内,二十一世纪初,王竞男等[10]采用IPM思想,用牛顿力学方法研究导弹;王鑫等[11]将拉格朗日方法应用到该方法的求解中,产生了明显的问题简化效果;蒋增辉等[12]将该方法的轨迹确定思想进行了修正,对分离时垂直加速度不足问题进行了补偿,提高了分析的精度;贾洪印等[13]利用该方法,采用灵敏度分析等手段,对多体动力学分离问题进行了快速度量,大大缩短了分析周期。另外在多体飞行器空中分离方面,宋威等、艾邦成等[14-15]先后对IPM类方法和DPM类方法的应用概况进行了综述。
然而,现行的2类方法,不论是IPM类方法还是DPM类方法,都相当繁琐。不仅需要建立大宗数据库,运行周期长,而且自身可移植性差,在工程领域以及精度要求较低的场合适用性不强。因而,为了提高分析速度,缩短分析周期,本文拟参考IPM类方法中网格测量法原理,设计一种易满足精度要求、速度快、可移植的分离问题数值分析方法,即影响箱-走廊法。本文将围绕该方法,对其逻辑、流程进行介绍,并结合一个应用案例给出研究结论。
1 组合体飞行器分离过程概述
本文研究对象为某并联构型组合体无人飞行器。该飞行器自身具备互联及分解的能力,并联的各个单体总质量均不超过35 kg,且单体自身不携带动力来源(但允许携带小型推力器用于辅助姿态调整),在分离后做无动力滑翔。
综合飞行器本身的使用环境、飞行性能,同时进一步考虑到飞行器本身需要具备良好的分离条件,所设计的组合体飞行器构型和单体构型如图1所示。

图1 某组合体飞行器整机及单机构型
组合体飞行器分离过程,是指其在空中分解时,从单体飞行器与组合体其余部分之间的连接机构分开开始,直到单体完全离开组合体的作用范围为止的整个时间段。
根据分离过程中受力特点的不同,将分离过程划分为分离机构作用区域(见图2a))及组合体对单体影响区域(见图2b))2个阶段。
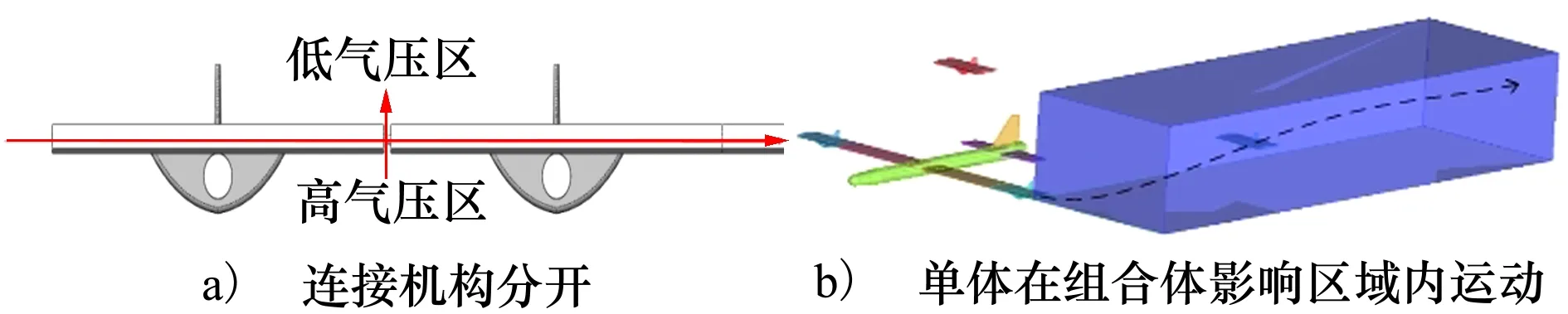
图2 组合体飞行器分离过程示意图
2个阶段中,第一阶段由于时间较短,可以简化为在恒力作用下的刚体瞬时冲击问题,直接采用多体动力学分析的方法即可求解,因而本文重点对第二阶段的分析方法进行研究。为了合理处理主体与单体之间不断变化的气动干扰影响,本文将以作用力的变化体现气动干扰。引入影响箱及走廊2个概念。其中,影响箱代表组合体通过干扰流场,对单体产生不可忽略气动力作用的区域,在影响箱中,组合体对单体气动干扰的影响不可忽略。走廊代表影响箱中满足单体安全分离条件的区域,在走廊中,单体具备安全分离的环境支持,仅通过简单调节自身控制系统,即可达成安全分离的目的。
由于分离过程本身呈现出非线性、非定常、强不确定性等特征,对该问题的精确求解难以实现。在确保精度的前提下,需要对该过程进行简化。常见的简化思想有准定常简化思想、线性化思想、参数化思想等。本文选用准定常简化思想,对问题进行简化。
2 影响箱-走廊法的介绍
2.1 影响箱-走廊法的简化思想及创新点
影响箱-走廊法通过准定常分析、解耦处理、切片拼接等技术手段,规避了传统分离问题IPM和DPM方法流程繁琐、周期长、适用性局限的缺点,可以用于解决飞行器空中多体投掷、空中多体分离轨迹设计与优化等技术难题,为实现飞行器空中分离轨迹的精确化与多影响因素参数化提供了切实可行的技术指导,其重点简化思想及创新点如下所述:
1) 借鉴了网格测量法的准定常分析思想,采用相对简捷的准定常方法来研究非定常问题,避免了对联立方程的求解,极大减少了方法所需数据库规模;
2) 通过合理设计影响箱的方式规避传统方法中需要搭建的大部分冗余网格,极大地减少了后续的运算量,缩短了运行周期;
3) 避免了传统方法与控制的耦合设计,巧妙结合切片理论,采用切片、拼接的方式对影响箱进行求解,得到完整的安全分离走廊,即可得出相应分离策略。
2.2 影响箱-走廊法的逻辑
影响箱-走廊法的逻辑图如图3所示。
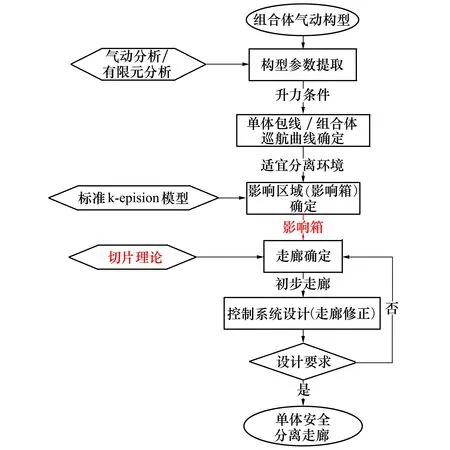
图3 影响箱-走廊法逻辑图
本方法通过对已知组合体气动构型进行分析,并配合气动分析及有限元分析的手段,提取相关构型参数,将其转化成升力取值范围,组成升力条件,并采用该条件依次确定单体包线及组合体巡航曲线,由所得曲线提取出单体适宜分离环境。以适宜分离环境为初始条件,选择k-epision湍流模型进行气动仿真分析,根据受力情况确定影响箱尺寸。采用切片理论对影响箱进行分割求解,将所得各切片拼接,即可得到单体初步分离走廊。最后,将该走廊用于控制系统设计,重复该流程,直到满足控制系统设计要求为止,所得到的走廊即为单体安全分离走廊。最终根据分离走廊得到单体分离策略。
与传统方法仅可以用于地面求解相比,影响箱-走廊法同样可以用于飞行器实际飞行过程中对于适宜分离区域的实时搜索,本文总结与展望部分对该情况进行了说明。
2.3 影响箱-走廊法的流程
影响箱-走廊法的流程图如图4所示。

图4 影响箱-走廊法流程图
影响箱-走廊法的主要流程分为构型参数提取、单体分离包线确定、组合体巡航曲线确定、典型方向受力分析、影响区域确定、走廊确定、走廊修正7个步骤。根据求解目标的不同,可以将步骤1~3划分为方法的预备阶段,即组合体适宜分离环境确定,将步骤4~7划分为方法的实施阶段,即组合体适宜分离区域确定。
2.3.1 组合体适宜分离环境确定
1) 构型参数提取
对表1所示参数进行提取。
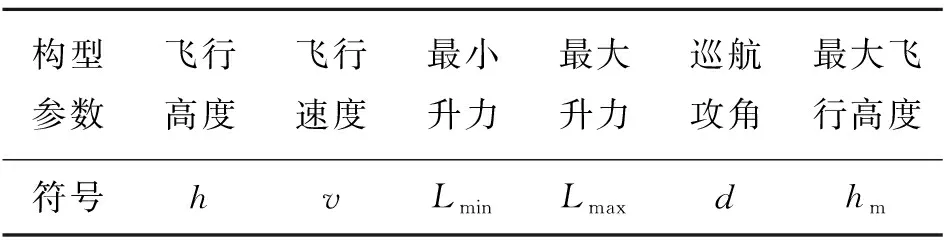
表1 待提取构型参数
2) 单体分离包线确定
基于初选的飞行参数,从取值范围中选定初始点,通过气动仿真得到该点的气动力数值。以初始点流体参数为已知条件,采用迭代法对单体飞行器气动构形进行计算,迭代计算格式如下:
(1) 保持高度不变,将速度视为未知数,根据升力系数的定义式给出速度求解公式(1),求得当前高度下为满足升力条件所需的速度。
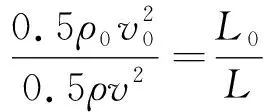
(1)
式中:ρ0为初始点气流密度;v0为初始点气流速度;ρ为待求点气流密度;v为待求点气流速度;L0为初始点升力,通过仿真获得;L为待求点升力,通过升力条件确定。
(2) 保持速度和升力不变,按照等间距的原则调整输入高度,将新高度对应速度视为未知数,根据升力的定义式给出速度求解公式(2),即可求得新状态下的速度。

(2)
式中:ρyz为已知点气流密度;vyz为已知点气流速度;ρwz为未知点气流密度;vwz为未知点气流速度。
以输入速度为横坐标、以输入高度为纵坐标,将迭代所得样本点逐点连接,形成的曲线即为所需的组合体飞行器单体分离包线,被该曲线半包围的区域即为单体适宜分离区域。
3) 组合体巡航曲线确定
基于得到的单体分离包线,以单体分离包线上的各点流体参数作为初始条件,对组合体进行气动仿真,输出各状态下组合体的升力,进而根据平飞原则,结合任务指标确定组合体质量的取值范围。随后,选择迭代步骤(2)中的初始点,对组合体进行流体动力学仿真,得到该点的气动力数值。最后,将升力条件中单体安全分离升力范围调整为组合体平飞时的升力取值,重复步骤(2)的迭代过程,将所得到的一系列离散点相邻点逐点连接,即可得到组合体巡航曲线。
2.3.2 组合体适宜分离区域确定
1) 典型方向受力分析
基于组合体巡航曲线,从曲线上选取某个巡航点,采用该点的流体参数作为后续气动仿真分析的初始参数;选取该环境下单体远离组合体的几个不同方向作为典型方向,选取各典型方向上单体相对于组合体的一系列不同的相对位置作为待分析离散点,保持组合体位置不变,将单体置于一系列离散点,得到一系列分离模型,对各分离模型进行气动仿真;对仿真结果进行六自由度受力分析,将得到的气动力变化情况作图表示。
2) 影响区域确定
根据各个方向受力情况的分析结果,从中选择升力、阻力和俯仰力矩变化情况作为判断标准,即第一评价指标,并由此界定各方向分离边界。将各个方向的分离边界点相互连接,所包围的封闭区域即为初步影响区域。
3) 走廊确定
根据获得的初步影响区域,结合任务指标进一步对其进行切割和筛选,得到用于分析的单体分离区域,即影响箱。对所得到的单体分离区域进行切片处理,即选取某个典型方向作为切片方向,按照一定间距对其进行切片,根据精度需求,可以将切片间距设定为百分之一至千分之一切片方向影响箱尺寸。对所得到的各切片,采用垂直于其切片方向的任意一个表面代替整个切片进行分析。对单体具有向组合体方向发生偏航、滚转、相对位移缩小3种姿态/位置变化趋势进行受力分析,确定满足相应情况时,偏航力矩、滚转力矩、侧向力的取值范围,作为第二评价指标。对各切片,利用第二评价指标作为判断依据,该方法的逻辑图如图5所示。

图5 切片处理算法逻辑图
如图5所示,在切片上选定初始标记点,而后通过气动仿真的方式获取标记点的气动参数,采用第二评价指标对其进行筛选,对筛选所获得的2种不同类型点进行连接,即为待分析连线。针对待分析连线采用二分法,确定连线上的临界点,将各临界点相连,获得迭代边界。判断所得边界是否满足切片精度要求,如果不满足要求,则返回,重新确定第二评价指标;直到满足要求后,对影响箱边界及迭代边界进行复合,所围成的区域即为该切片上的分离区域。最后,将所得各个切片进行拼接,其中位于各切片上的适宜分离区域相互拼接组成的区域即为单体初步分离走廊。
4) 走廊修正
基于所得到的单体初步分离走廊,选择控制策略、设计控制系统,并对其控制效果进行仿真检验,判断单体在现有外部分离环境及内部控制系统的共同作用下,能否沿该走廊脱离影响区域,并且精度满足任务要求。若单体可以满足上述要求,则该走廊即为单体最终分离走廊;若不满足上述要求,则返回步骤3)走廊确定过程调整第二分离指标及切片间距,对走廊进行完善和细化,重复走廊确定及走廊修正过程步骤3)~4),直到满足上述要求为止,则所得到的走廊即为单体安全分离走廊。
3 一种基于互联-分解的组合体飞行器单体分离走廊确定
3.1 组合体适宜分离环境确定
3.1.1 构型参数提取
根据组合体飞行器尺寸特征以及任务要求,初步确定组合体飞行速度为60~110 m/s,飞行高度为1 000~11 000 m。对组合体的升阻比情况进行分析,将气流作为不可压缩流处理,忽略雷诺数及马赫数对升阻比的影响,分析攻角变化对于组合体飞行器升阻比的影响情况,从初步确定的工况中,选择60 m/s飞行速度,1 000 m飞行高度作为气动仿真的初始环境,采用k-epision湍流模型,SIPMLE算法进行仿真,得到组合体飞行器升阻比随攻角变化如图6所示。

图6 组合体飞行器升阻比随攻角变化情况
由图6可知,组合体在攻角4°~8°范围内,升阻比可达14左右,具备良好的巡航特性。另外,在邻近取整的原则下,当组合体飞行器在5°攻角下巡航时,组合体具备最佳的巡航性能。因而,后续的所有分析均基于5°攻角展开。
对组合体的分离机构受力情况进行有限元仿真。对于组合体而言,其受力情况最恶劣的部位在内侧单体与主体交界面。如图7所示,当组合体仅受重力时,该交界面所所受最大应力为324.54 MPa(连接件材料TC4屈服强度895 MPa),安全系数为2.76,符合强度要求。

图7 组合体分离机构所在面应力分析图
如图8所示,当组合体巡航攻角增大时,组合体升阻比将急剧减小。取升阻比8作为临界状态,可得适宜组合体巡航的最大攻角为10°。此时,组合体中单个单体所受升力为712.57 N,取0.85的余度用作调整,即可认为单体分离时所受最大升力不可超过600 N。

图8 组合体升阻比随大攻角衰减示意图
3.1.2 飞行器包线确定
假设单体分离时,组合体处于巡航状态,因此可以确定,升力大于350 N,联合3.1.1节结构及发动机所给出的约束,即可得单体分离时升力范围为350~600 N,另外,对组合体发动机进行选型,可大致确定组合体发动机的工作环境不超过对流层,即不大于11 000 m,由此确定了单体安全分离需具备的升力条件。
选取初始点飞行速度为60 m/s,飞行高度为1 000 m,飞行攻角为5°,对单体进行气动仿真,测得升力为318 N,阻力为48.3 N。结合上述条件,选定速度迭代间隔为5 m/s,高度迭代间隔为1 000 m,按照方法的一般流程分别进行速度迭代和高度迭代。由此,得到由升力条件约束下单体分离时的速度、高度取值范围,作出单体适宜的分离包线如图9所示。

图9 单体适宜分离包线示意图
由图9可知:对应任意高度处,为了达成所给定的升力条件约束,单体需要具备一定的分离速度上下限,该限度随着单体分离高度的增加而增加,并且分离速度的涵盖区间也伴随着分离高度的增加而增大;在分离包线所围成的半封闭区域内,任意一点均可满足单体分离的升力条件,即单体在该环境下,具备安全分离的前提。
3.1.3 组合体巡航曲线确定
由分离发生在组合体巡航过程中的假设可知,由3.1.2节所确定的单体分离包线同样可以视为组合体所对应的巡航曲线。由此出发,对组合体展开气动仿真,仿真条件同3.1.2节所得单体分离包线上的某离散点。对仿真结果进行汇总,可得组合体主体在分离包线范围内升力范围为4 425.6~8 587.6 N,根据飞行器平飞时升力等于重力,反推选择相应条件下组合体主体的重力为4 500 N,进而可得组合体重力为5 900 N。由此知,当组合体处于巡航状态时,升力需保持为5 900 N。类似于3.1.2节,按方法一般流程进行速度迭代和高度迭代,由此即可算得一系列离散点数据。将所得的离散点按顺序进行整理,即可做出一条完整的速度-高度曲线,即为组合体巡航曲线,如图10所示。由图10可知:在图中曲线上任意一点进行飞行器分离,均满足单体安全分离时的升力条件,即升力大于重力、结构强度及发动机性能均满足要求。单体在图中任意一点分离的瞬间,组合体均处于平飞的巡航状态,组合体在该巡航状态下,具有最大升阻比,满足了整体任务对于组合体大航程、长航时的要求。
图10 组合体巡航曲线示意图
3.2 组合体适宜分离区域确定
3.2.1 影响箱的确定
从组合体巡航曲线中选择整体飞行环境相对良好的工况——巡航高度2 000 m,巡航速度66.6 m/s的样本点,对组合体展开气动分析。对于其他各点的分析与该点完全一致。
对影响区域做箱体假设。以分离点作为坐标原点,分别以侧向、上下向、前后向作为坐标轴,建立空间直角坐标系。根据对流场的定性分析,仅保留主体后上方的区域作为单体分离箱的分析范围;选取侧向、上向、后向作为3个典型方向,对最外侧两单体分离后的组合体进行气动仿真分析,并整理受力情况。选择采样点线性采集和指数采集相结合的方式。选取的初始采样侧向间隔单位为10 mm,上向间隔单位为500 mm,后向间隔单位为1 000 mm;对待分析对象采用非结构化网格生成策略,选择边界层初始厚度为2 mm,增长率为1.2,层数为5层,所生成的面网格如图11所示。

图11 待分析对象的面网格示意图
经过多次调整比对,最终确定仿真条件如表2所示。

表2 典型方向受力分析仿真条件表
对气动分析结果进行整理,以侧向受力情况为例,得到该方向的六自由度受力变化情况如图12所示。

图12 侧向六自由度受力变化示意图
选择各方向各采样点升力、阻力以及俯仰力矩作为评价指标,对相应指标与单体自由飞行时各方向受力做相对误差计算,当二者之间误差最后一次达到5%时,可以认为组合体对单体的影响忽略不计,即达到影响箱边界。经上述分析所得到的影响箱尺寸如图13所示,则该区域即为待分析的单体分离区域。

图13 影响箱尺寸示意图
3.2.2 走廊的确定
按照影响箱-走廊法的一般流程,沿展向对影响箱进行切片处理,选取切片间隔为10 mm。
对单个切片进行分析,给出走廊的评价指标。将单体具有向组合体方向发生偏航、滚转、相对位移缩小3种姿态/位置变化趋势简称为内卷、内滚、内吸(如图14所示)。

图14 内卷、内滚和内吸受力情况示意图
对3种情形受力情况进行分析可知,内卷、内滚和内吸对应偏航力矩、滚转力矩和侧向力取负值的情况,以相应受力情况作为单个切片上适宜分离区域的判断指标。
分别对影响箱内表面和外表面采用判断指标进行分析,选择的各分析点及得到的符合约束的区域如图15所示。

图15 典型切片适宜分离区域
将经过分析后的各切片进行拼接,各切片上分离区域所围成的封闭区域即为相应的单体初步分离走廊,该走廊即为后续分离策略研究中单体安全分离轨迹所形成的包络。
3.2.3 走廊的后续修正及结果
根据上文分析所得到的初始走廊,对组合体控制系统进行设计,并结合具体的设计结果及控制效果,判断初始走廊是否在组合体自身控制的范围内,从而对初始走廊进行相应的优化处理。
最终,将结果融合后,得到的区域(如图16所示)即为最终要求的单体适宜分离走廊,即单体最终适宜分离轨迹的包络区域,可用于指导后续分离策略的设计。

图16 单体安全分离走廊示意图
4 总结与展望
作为一种针对组合体飞行器安全分离走廊的实用快速生成方法,影响箱-走廊法通过舍弃一部分精度的方式,极大地缩短了运行周期,最终得到单体安全分离走廊,可以直接用于指导后续组合体分离策略的设计,并简化后续控制系统的设计流程。
而就该方法的应用领域而言,其应用范围并不仅限于文中所述的组合体飞行器分离问题。由于该方法自身具备的优势和特点,该方法在以下方面,也有着可预见的应用前景:
其一,在飞行器分离及空中投掷领域,该方法可以作为传统方法的先行方法,与传统方法有机结合,可得到高精度的飞行器分离轨迹,与单纯应用传统方法相比,该方法的引入可以极大地节约后续的计算空间和时间;
其二,在飞行测试领域,该方法作为一种快速性方法,由于其本身运算量较少、代码量低,经过适度改进,可以应用于组合体飞行器在空中实时确定相应单体的分离轨迹、作战单位在空中实时确定相应战斗部的抛掷轨迹等多种情景。通过在飞行器中植入该方法的分析程序,在空中飞行时,飞行器可以随时确定适宜分离轨迹,判断当前条件是否适宜于分离,从而给出适宜的分离策略,极大地提升了飞行器使用的灵活性。
猜你喜欢
宇航学报(2023年5期)2023-06-25
实验流体力学(2023年1期)2023-03-21
第二课堂(课外活动版)(2022年4期)2022-04-23
军民两用技术与产品(2021年10期)2021-03-16
装备制造技术(2020年1期)2020-12-25
文苑(2020年4期)2020-05-30
空间科学学报(2020年4期)2020-04-22
中学课程辅导·教育科研(2019年3期)2019-09-10
小学生学习指导(低年级)(2019年6期)2019-07-22
北京航空航天大学学报(2016年3期)2016-02-27
