
基于HRRP时频特征和多尺度非对称卷积神经网络的目标识别算法
2023-07-19 08:36云涛潘泉郝宇航徐蓉
西北工业大学学报 2023年3期
云涛, 潘泉, 郝宇航, 徐蓉
1.西北工业大学自动化学院, 陕西 西安 710129; 2.中国人民解放军63768部队, 陕西 西安 710600;3.信息融合技术教育部重点实验室, 陕西 西安 710114
由于雷达作用距离远、可全天候工作,基于雷达测量数据的目标身份识别在现代目标识别中发挥着关键性作用[1]。由于HRRP获取容易、携带信息丰富、运算量小、实时性强,同时可以避免ISAR图像在成像过程中的运动补偿和识别中的旋转、伸缩、变形等问题,得到了广泛研究和应用。
决定HRRP目标识别准确率的关键是特征提取、选择和分类识别算法,这也是研究的热点。利用HRRP的特征提取和识别算法已有很多,如基于散射点模糊匹配的算法[2]、基于字典学习的噪声鲁棒性特征提取方法[3-4]、基于流形学习的特征降维方法[5]、基于中心矩特征的BP神经网络识别方法[6]、基于样本紧密度的HRRP目标识别[7]等。这些算法在各自的数据集上实现了较高的准确率,但需要人工设计和提取特征,严重依赖于研究人员的经验。在缺乏先验知识时,难以有效保证算法的准确性和稳定性。
深度学习是人工智能领域一个新的研究热点,被广泛应用于文本处理[8]、图像识别[9-11]、语音识别[12]、工业控制[13]、交通运输[14]和医疗健康[15]等领域,并取得了超越传统算法,甚至人类的表现。
文献[16]将CNN和循环神经网络相结合,提取雷达图像像素之间蕴含的上下文信息。文献[17]设计了一种混合型复数域CNN,消除了目标散焦、方位模糊,提高了三维转动舰船目标识别准确率。文献[18]提出一种迁移学习方法解决车辆目标雷达图像识别中大样本训练难的问题。由于HRRP获取容易,信息丰富,可以避免雷达图像识别中的各种问题,因此更有利于目标识别。文献[19]提出一种堆叠自动编码的深度架构,可以获得比浅层模型更好的识别准确率。文献[20]利用CNN网络和目标的全极化HRRP数据进行舰船目标识别。文献[21]将深度适配网络引入到HRRP目标识别中,以增强模型在杂波背景下的识别能力。文献[22]利用双向长短时记忆网络提取目标HRRP中的时序信息,实现雷达目标的识别。文献[23]提出了一种利用CNN网络对多基地雷达获取到的HRRP信号进行目标分类的方法。
为了解决空中飞机目标和太空人造航天器目标识别中HRRP特征提取难、准确率低等问题,本文提出了一种基于HRRP时频特征和多尺度非对称卷积神经网络(multi-scale asymmetric convolutional neural network,MsACNN)的目标识别算法。首先采用离差标准化、多特显点绝对对齐消除目标的强度敏感性和平移敏感性,利用雷达多普勒测速数据消除目标高速运动对HRRP产生的展宽、畸变、波峰分裂等影响。然后对HRRP进行时频分析,提取其时频特征。通过不同尺度的非对称卷积,实现时频特征不同精细程度和不同方向的特征提取。之后利用2层全连接层实现目标分类识别。最后,分别利用飞机和卫星2组实测数据验证了本文算法的性能。
1 雷达高分辨率距离像
雷达主要通过增大发射信号带宽,实现更高的距离分辨率[24]。当距离分辨率由米级提高到分米、厘米级时,雷达“眼中”的飞机或卫星将由一个“点状”回波变为一个沿着距离方向分布的一系列“点状”回波。因此,HRRP是目标被雷达波照射到的所有散射点在距离方向的投影,是对目标结构的真实反映,包含了目标大部分散射点的信息,可以用于目标识别。图1所示是一个仿真卫星的散射点模型及其对应HRRP。
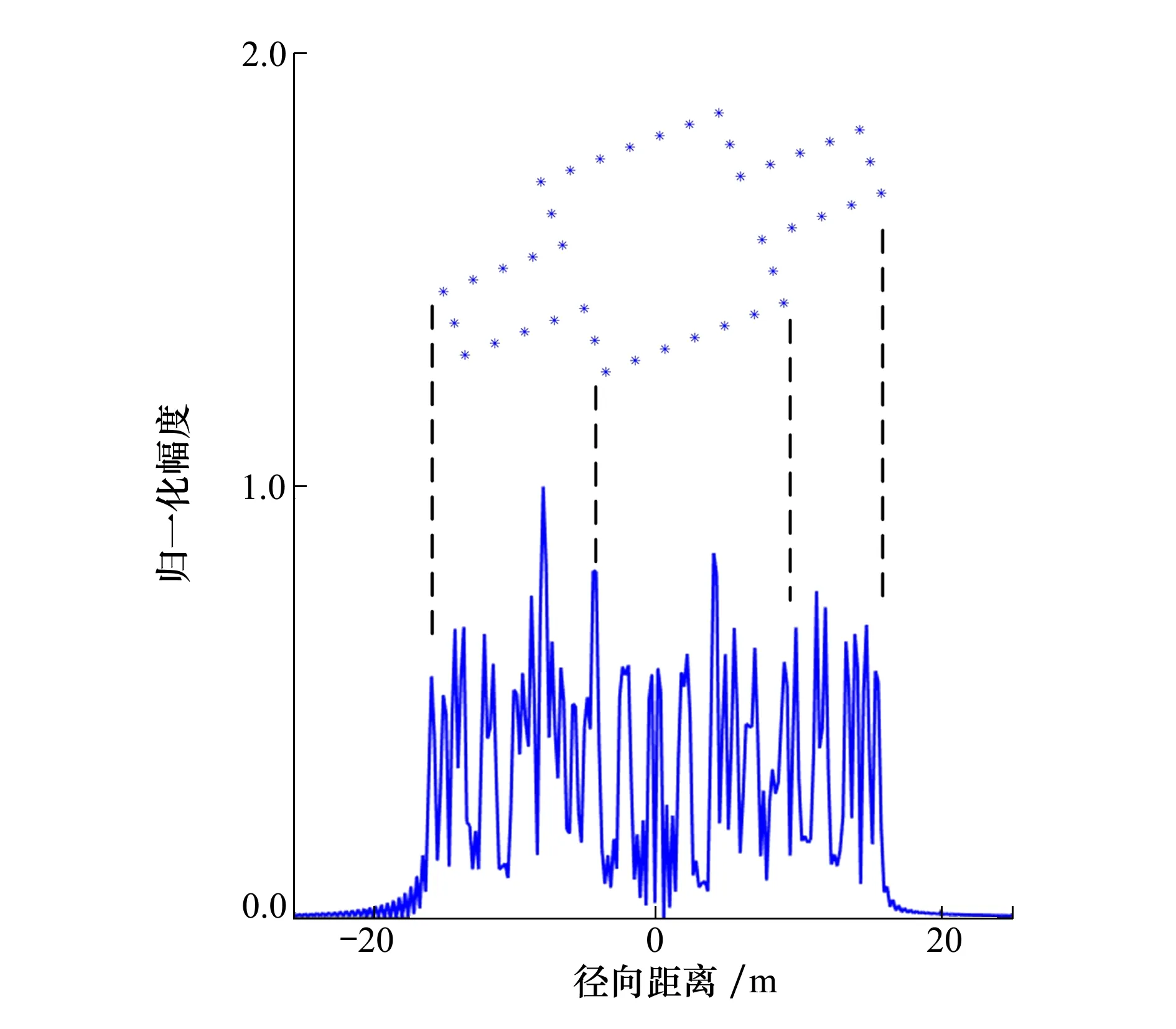
图1 仿真目标及其HRRP对比示意图
2 基于多尺度非对称卷积神经网络的HRRP识别算法
针对HRRP的平移、姿态、强度敏感性以及高速运动的影响,本文采用多特显点绝对对齐、离差标准化等方式进行预处理,消除其影响,利用短时傅里叶变换将HRRP从一维距离域转换到二维时频域,输入设计好的卷积神经网络,进行目标分类识别。
2.1 数据预处理
1) 高速运动补偿。雷达多普勒测速结果精度较高,可以用于补偿目标高速运动对HRRP造成的谱峰展宽、分裂和信噪比降低等影响。
已知径向速度v,构造补偿信号:
(1)

图2所示为目标高速运动补偿前后的HRRP,均采用补偿后HRRP的最大值进行归一化。由图中可以看出补偿后的HRRP信噪比更高,谱峰展宽和分裂已被消除。

图2 目标高速运动补偿前后HRRP
2) 采用多特显点绝对对齐法消除平移敏感性。计算每个距离单元的归一化幅度方差,确定特显点单元,利用多特显点法对HRRP序列进行对齐。为了简化CNN的参数量和训练难度,对齐时统一利用多特显点法将HRRP的重心对齐到距离窗的中心。
3) 采用离差标准化消除幅度敏感性。采用离差标准化方法,通过线性映射,将每一帧HRRP的幅度范围变换到[0,1]区间。通过归一化,可以使深度学习的重点聚焦在不同目标HRRP形态的差异,减少了同一目标不同回波强度HRRP对训练的影响,使模型更快收敛,并实现更高的识别准确率。
4) 合理设计数据集和模型训练过程,削弱姿态敏感性影响。在构建训练数据集时,选择尽可能多的不同姿态下的数据,提高数据集对目标姿态表征的完备性。在模型训练时,尽可能使每个批次包含不同姿态的目标数据,避免神经网络过早陷入少量姿态的“局部最优解”。
2.2 特征提取
利用时频分析将HRRP从一维距离域转换到二维时频域,可以将HRRP携带的目标信息更加直观地呈现给神经网络。时频分析方法中最常用到的就是短时傅里叶变换(short-time Fourier transform,STFT),通过时间窗内的一段信号来表示某一时刻的信号特征。定义如下

(2)
式中:z(u)为原信号;g(u-t)为窗函数。
图3所示为图2中的HRRP利用STFT时频变换后的谱图。

图3 HRRP的STFT谱图
2.3 卷积神经网络
1) 卷积层
卷积层是卷积神经网络中最重要、最常用的结构。卷积层其实就是将不同的卷积核应用到一个张量的所有点上,通过卷积核在输入矩阵上的滑动,产生经过处理的新张量。不同于传统全连接层,每个节点是通过上一层所有节点计算得到的,卷积层每个节点只和上一层的一部分节点有关。此时,卷积核可以理解为一种滤波器。在卷积神经网络中,卷积核的个数一般是多个,以便利用不同的卷积核(滤波器)提取输入矩阵中不同的特征。图4所示为卷积层示意图。
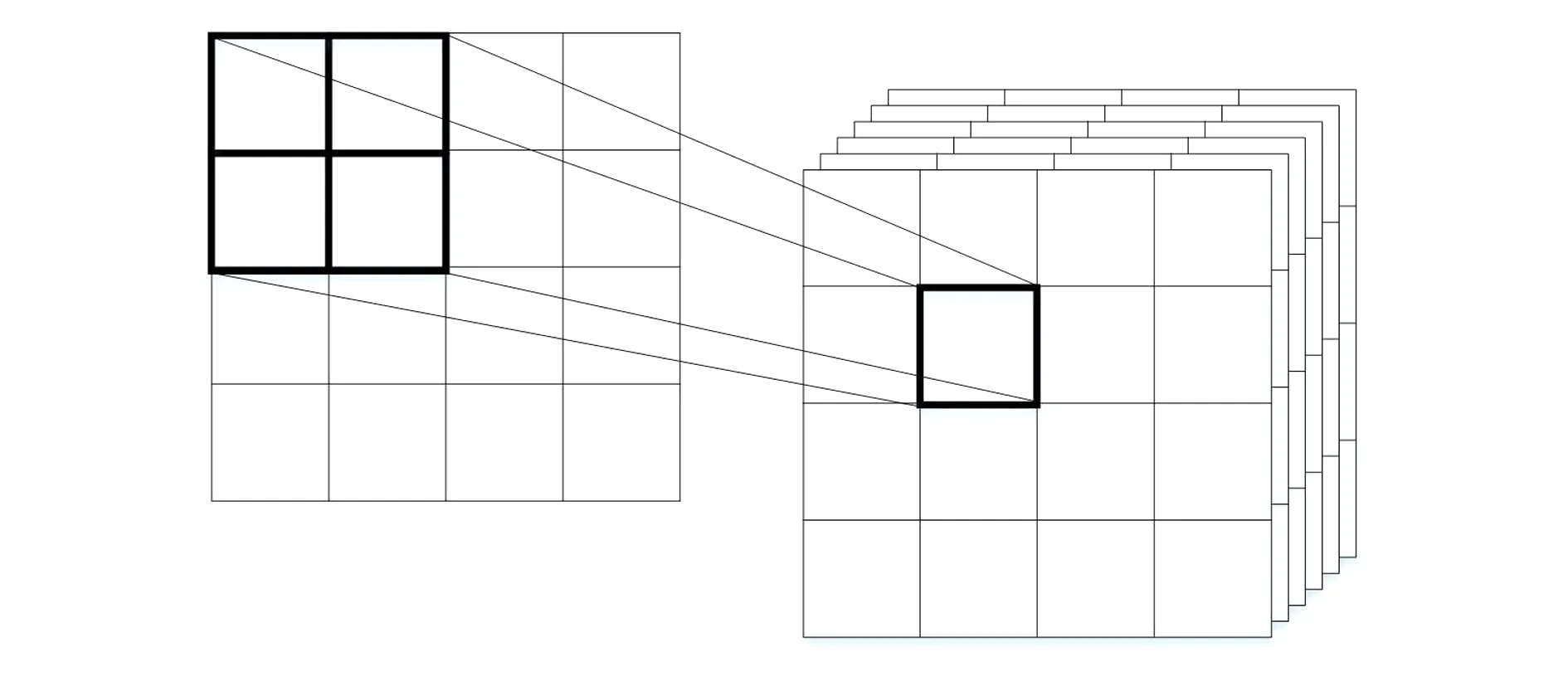
图4 卷积层示意图
假设一张二维的图像I作为输入,使用一个二维的卷积核K,其输出可以表示为:
(3)
2) 多尺度非对称卷积模块
共设计了2种不同的卷积模块,分别是多尺度二维卷积模块和多尺度非对称一维卷积模块,如图5~6所示。2种模块都包含4个分支。

图5 多尺度二维卷积模块

图6 多尺度非对称一维卷积模块
在多尺度二维卷积模块中,第1个分支包含64个1×1卷积,主要是在控制网络通道数的同时,提供跨层连接,使网络损失可以更容易地传递到网络的前面几层,防止梯度消失。损失进行后向传递时,从最右侧分支传递,需要经过3层卷积才能传递到上1个模块,从最左侧分支则只需要经过1层卷积。
其余3个分支的基础卷积模块都使用3×3的小尺度卷积。不同的是,3个分支的卷积层数不同,分别是1,2,3层。这是为了利用多层小尺度卷积实现大尺度卷积效果。利用2,3层3×3的卷积分别可以实现5×5,7×7卷积的感受野,但是参数数量更小。以1层7×7卷积和3层3×3卷积的对比为例,每一层中C个通道,3层3×3卷积的参数数量为3×32×C2,1层7×7卷积的参数数量为72×C2。所以3层3×3卷积以约55.10%的参数量实现了1层7×7卷积同样的感受野。4个分支分别实现了1×1,3×3,5×5和7×7卷积的感受野。尺度越大提取的精度越粗,尺度越小提取的精度越细。通过4种尺度卷积的融合,可以同时兼顾感受野和精度,减小网络参数,同时提供跨层连接,防止梯度消失,提高网络收敛速度。
在每个卷积层的后面都有一个批标准化层,以规范每层输入信号的均值和方差,保证每层的输出数据与输入数据具有相同的分布特征,确保神经网络层数增加以后不会更难训练。之后对4个分支的数据进行通道维合并。在合并之后进行池化操作,以减少数据量。
在多尺度非对称一维卷积模块中,第1个分支也包含64个1×1卷积。第2个分支通过3层3×1的卷积,实现7×1卷积的效果。第3个分支通过3层1×3的卷积,实现1×7卷积的效果。第4个分支通过串联1个1×7和1个7×1卷积,实现7×7卷积的效果。
采用非对称卷积是为了在保证感受野相同的同时,降低网络参数数量。以7×7卷积为例,参数数量为72×C2。如果串联1个1×7和1个7×1卷积,感受野同样为7×7,参数数量为2×1×7×C2,相比于7×7卷积,参数数量降低了约71%。
3) 网络结构
图7为本文设计的用于HRRP目标识别的网络结构。网络主要包含4个部分:初始卷积模块、多尺度卷积模块、多尺度非对称卷积模块、判别模块。
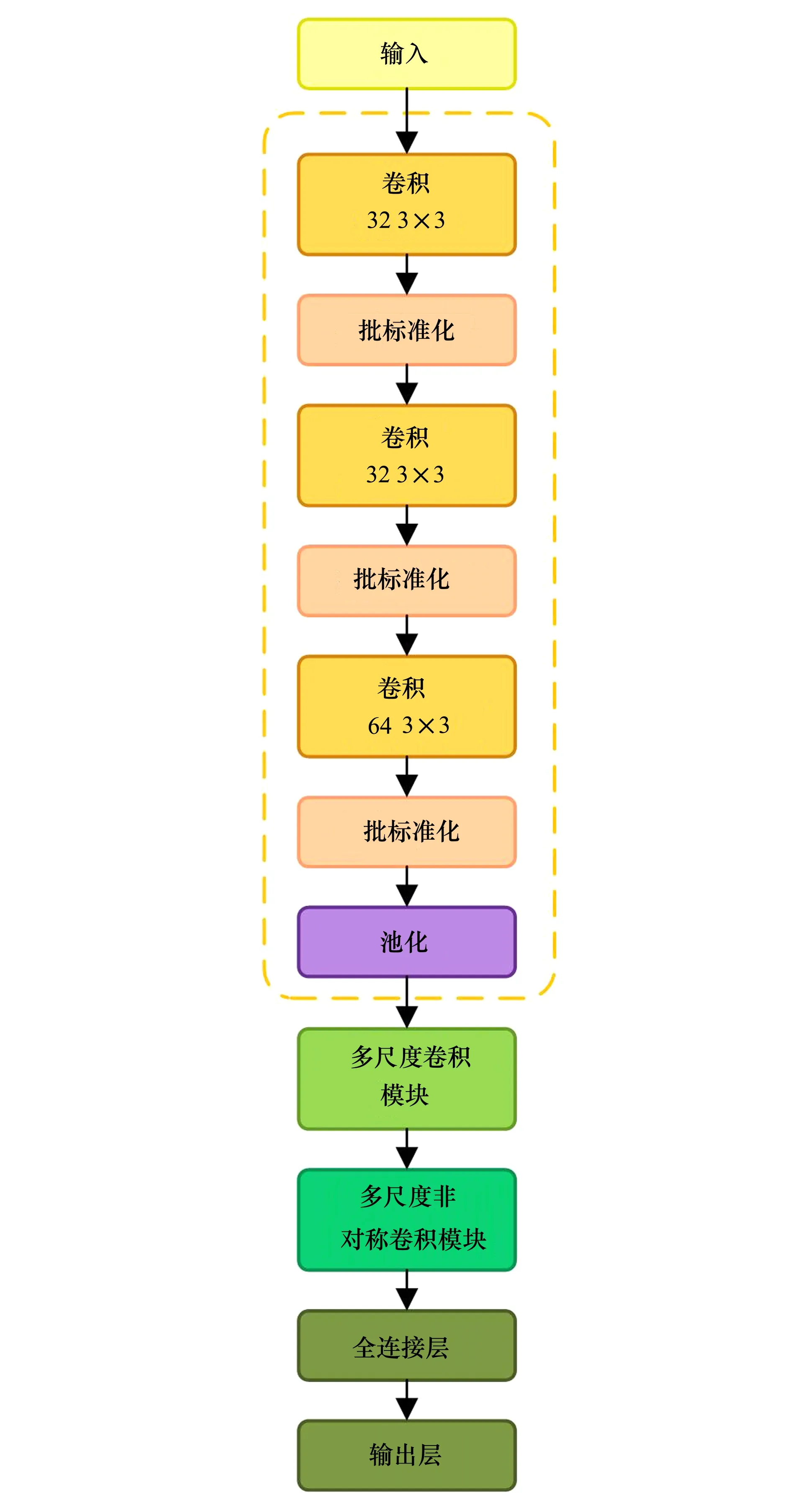
图7 MsACNN网络结构
初始卷积模块使用传统小尺度二维卷积模块,对时频数据进行初步特征提取。该模块主要包含3个3×3卷积层和1个池化层。在每个卷积层后使用批标准化对卷积输出结果进行规范。多尺度卷积模块主要提取数据中不同尺度的信息。通过小尺度卷积的叠加实现大尺度卷积的效果,以减少网络参数。通过1×1卷积提供跨层连接,提高网络的收敛能力。多尺度非对称卷积在进一步加深网络,提高特征提取能力的同时,极大地减小了网络参数。最后利用2层全连接层作为判别模块,输出目标类别。
3 实验结果与分析
3.1 数据集1及实验结果分析
1) 实验数据集1
实验数据集1为采用地基逆合成孔径雷达对三型飞机采集的实测宽带数据。安-26是一种尺寸中等的螺旋桨飞机,奖状和雅克-42分别是小型和中型的喷气式飞机,表1所示为三型飞机的尺寸参数。雷达中心频率为5.5 GHz,带宽为400 MHz。图8所示为三型飞机飞行轨迹在当地水平面上的投影。每型飞机的HRRP数量约为10万条,数据长度为256,训练、验证和测试的比例分别为60%,20%,20%。
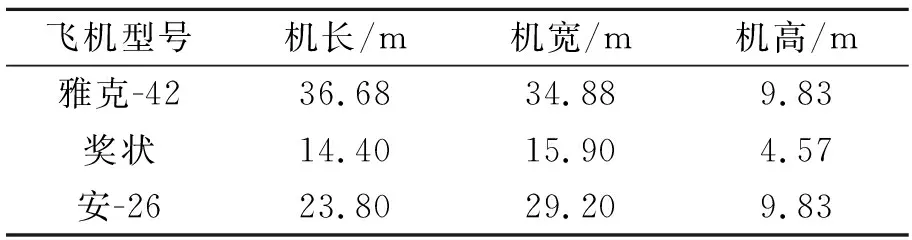
表1 三型飞机尺寸参数
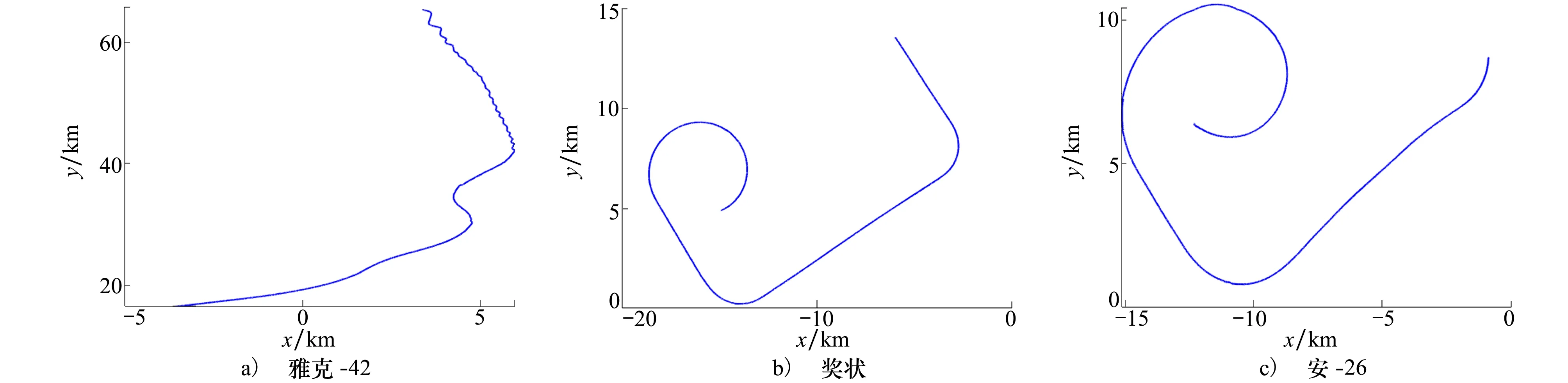
图8 三型飞机飞行轨迹在当地水平面的投影
2) 实验结果
为了验证本文方法的性能,在相同实验条件下,对于数据集1,分别使用不同方法进行训练和测试。在HRRP特征下,使用样本紧密度[7]、VGG16-1D、CNN[23]、一维多尺度卷积网络(one-dimensional multi-scale convolutional neural network,MsCNN-1D)4种方法或模型进行处理。将本文提出的MsACNN中多尺度非对称卷积模块替换为多尺度卷积模块,并将所有的二维卷积和二维池化替换为一维卷积和一维池化,记为MsCNN-1D。在时频特征下,使用VGG16-2D和本文提出的MsACNN-2D 2个模型进行处理。
表2给出了不同方法对数据集1的目标识别准确率,本文方法目标识别准确率达到了99.10%,显著高于其他几种方法。
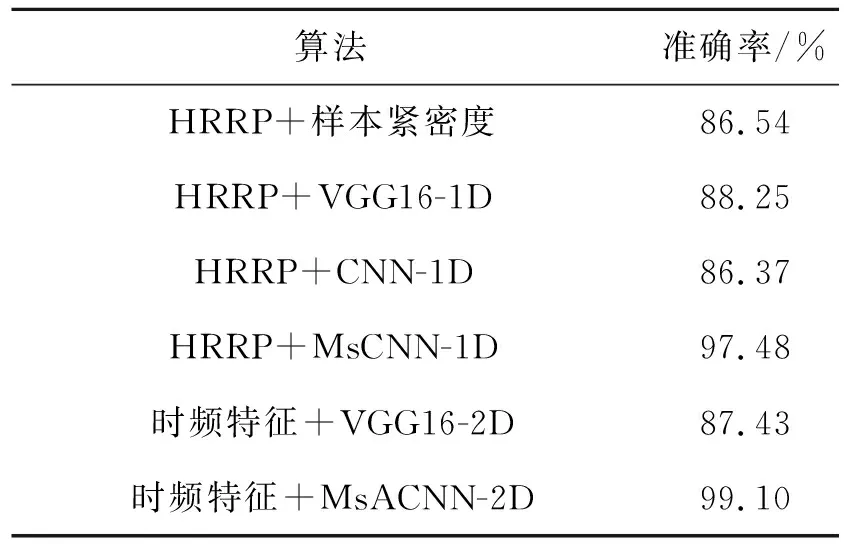
表2 不同目标识别算法对比
表3给出了本文方法在数据集1上的目标识别混淆矩阵。可以看出,每个目标都只有少量样本识别错误。
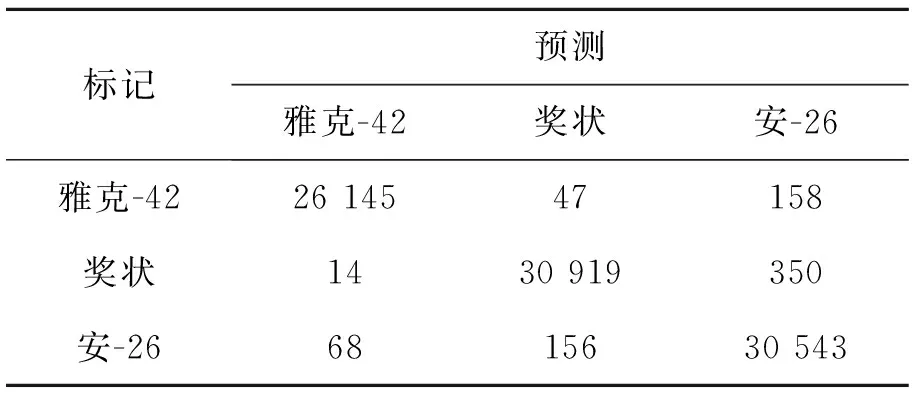
表3 数据集1目标识别混淆矩阵
表4所示为几种模型的参数量,可以看出本文方法模型参数量只有一维VGG16模型的85%,二维VGG16模型的35.52%,略高于文献[23]提出的CNN网络。

表4 不同模型参数量
3.2 数据集2及实验结果分析
1) 实验数据集2
不同算法在数据集1上都取得了不错的识别准确率。但从表1可以看出,这3种类型的飞机从尺寸和外形等方面比较,都有较大区别,易于识别。为了进一步验证预处理、同平台目标的识别准确率,建立了数据集2。
数据集2为采用地基逆合成孔径雷达对太空人造航天器的实测数据,有A1、A2、B1和B2共4个目标。其中A1和A2同为A系列的2个目标,B1和B2同为B系列的2个目标。每个太空人造航天器的HRRP数量约为4万条,数据长度为256,训练、验证和测试的比例分别为60%,20%,20%。
经公开资料、实测ISAR图像和自适应光学图像验证,同属一系列的2个目标具有几乎相同的尺寸和外形结构,人眼不具有可分性,这对目标识别算法产生极大的挑战。
2) 识别准确率
对数据集2,采用高速运动补偿、多特显点绝对对齐和离差标准化等预处理方法,并采用时频分析提取时频特征,而后进行模型训练和识别。在训练过程中,使用数据集1训练好的模型进行迁移学习,由于原模型权重已经平滑,为防止过拟合,采用了更低的初始学习率、学习率缓降和提前终止。
使用数据集1中的6种方法,对数据集2的HRRP和时频特征进行处理。表5所示为不同算法的识别结果,可以看出由于同平台目标具有较为相似的结构,6种方法识别准确率均有下降,但本文方法仍保持了较高的识别准确率。

表5 不同目标识别算法对比
表6为本文方法对4个目标识别的混淆矩阵,目标识别准确率为95.50%。表7为A、B 2个系列间识别的混淆矩阵,系列识别准确率为98.48%。从表6~7可以看出,即使对于差别较小的同平台目标,本文方法依然具有很高的识别准确率。目标识别准确率低于系列间识别准确率的原因是,同系列的2个目标采用相同的平台,具有极为接近的外形结构,系列间的差异性大于同系列的2个目标间的差异性,导致每个目标识别错误中,识别为同一系列另一目标的结果较多。

表6 数据集2目标间识别混淆矩阵

表7 数据集2系列间识别混淆矩阵
3) 各类预处理对识别准确率的影响
虽然深度学习可以实现基于数据的识别,降低了对于预处理和特征提取的需求,但在实际工作实践中发现,合理的预处理以及特征域转换对于识别算法的准确率有着极其重要的影响。为了验证不同预处理方法对识别准确率的影响,需验证不同预处理方式的有效性并探究其对算法性能的影响的程度。
从表8可以看出,4种预处理方法均不同程度提升了算法的性能。采用多特显点绝对对齐提升了0.41%的识别准确率,提升幅度较小,主要是由于卷积神经网络使用卷积核对整个数据进行特征提取,同时还要经过池化层的降采样,这在一定程度上降低了平移敏感性的影响。高速运动补偿提升了2.23%的识别准确率,这是由于通过高速运动补偿消除了高速运动对回波信号产生的谱峰分裂和展宽等影响,使得数据质量明显提升。时频特征提取提高了0.93%的准确率。
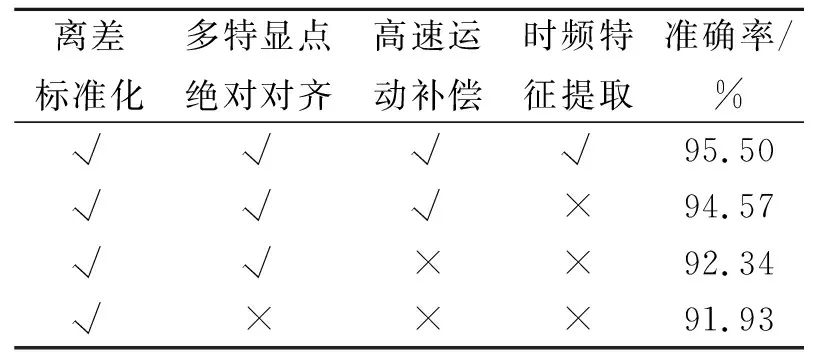
表8 不同预处理方式对算法性能的影响
4) 抗姿态敏感性分析
本节训练集和测试集划分时采用随机划分,训练集和测试集中具有相同或相近姿态条件下的数据,无法验证算法对于不同姿态回波数据的识别准确率。为了验证本文算法抗姿态敏感性能,设立新的测试集,图9所示为A1卫星5个观测弧段在极坐标系下的飞行轨迹。

图9 A1卫星在极坐标系下飞行轨迹
图中蓝色实线所示为训练和验证集使用的4个弧段,红色虚线所示为新的测试弧段,可以看出新的测试弧段和原训练集中的弧段雷达观测角区别较大。使用新弧段的测试数据,对识别算法进行测试,识别准确率为95.26%。由于姿态不同,识别准确率略有下降,可见本文方法具备较强的抗姿态敏感性。
4 结 论
针对太空目标识别中特征提取难、准确率低等问题,提出了一种基于深度学习的雷达HRRP目标识别算法。采用离差标准化、多特显点绝对对齐对目标HRRP进行预处理,消除幅度敏感性和平移敏感性,利用雷达多普勒测速数据进行高速运动补偿,消除回波距离像平移、谱峰分裂、展宽和信噪比降低等影响,利用短时傅里叶变换提取HRRP的时频特征,设计了用于太空目标识别的多分支非对称卷积神经网络模型,对时频特征进行特征提取和分类识别。实测数据处理结果表明:在由雅克-42、奖状和安-26 3个飞机组成的目标集上识别准确率达到了99.10%,明显优于其他识别算法;在由A1、A2、B1和B2共2个系列4个目标构成的目标集上识别准确率达到了95.50%,表明该算法在同系列目标集上依然具有较高的识别准确率;通过不同姿态下的目标数据测试,证实本文算法具有很强的抗姿态敏感性。
猜你喜欢
数学年刊A辑(中文版)(2018年2期)2019-01-08
电子制作(2018年19期)2018-11-14
自动化学报(2017年11期)2017-04-04
数学理论与应用(2016年4期)2016-05-17
电测与仪表(2015年4期)2015-04-12
舰船科学技术(2015年8期)2015-02-27
噪声与振动控制(2015年4期)2015-01-01
电测与仪表(2014年17期)2014-04-04
振动、测试与诊断(2014年6期)2014-03-01
太原城市职业技术学院学报(2014年9期)2014-02-27
