基于文献计量的自动驾驶名词体系构建方法
2023-06-26 17:00史金鹏王海杜振雷
中国科技术语 2023年2期
史金鹏 王海 杜振雷


摘 要:作为新兴前沿交叉学科,自动驾驶领域名词亟须进行规范。文章使用VOSviewer软件作为工具,对Web of Science核心合集中1991—2021年自动驾驶领域的5087篇文献进行关键词计量与可视化呈现,并对自动驾驶领域的名词与科技前沿进行了分析。文章根据科技名词规范化工作原则,以关键词聚类图谱为基础,尝试构建自动驾驶名词框架,包括智能网联系统、智能驾驶信息和人机协同驾驶三个分支,并对名词框架体系进行了分析。文章的研究是名词审定工作流程中阶段性工作的一种创新尝试,以文献计量学方法为工具开展前沿交叉领域名词的规范化工作。
关键词:自动驾驶;文献计量;VOSviewer;科技名词;关键词图谱
中图分类号: H083;V323.19 文献标识码: A DOI:10.12339/j.issn.1673-8578.2023.02.005
Analysis on Term Standardization of Autonomous Driving Based on Bibliometrics//SHI Jinpeng, WANG Hai, DU Zhenlei
Abstract: As a frontier interdisciplinary subject, the scientific terms of autonomous driving needs standardization. Using VOSviewer, we carried out, bibliometric and visual analysis on the keywords of autonomous driving in 5087 publications of autonomous driving from 1991 to 2021 in the core collection of Web of Science. According to the principle of standardization of scientific term and keyword map, we constructed and analyzed scientific term framework for autonomous driving, including intelligent connected vehicle, autonomous driving and human-machine collaborative driving. This study explored an innovative method of scientific terms standardization in frontier interdisciplinary subjects.
Keywords:autonomous driving;bibliometric;VOSviewer;scientific term;keyword map
收稿日期:2022-05-17 修回日期:2022-09-02
基金项目:国家语言文字工作委员会“十三五”科研规划2020年度一般项目(全国中文学习联盟研究专项)“面向中文学习者的科技名词术语释义扩展生成研究”(YB135-155);全国科学技术名词审定委员会事务中心2022年度一般项目“基于文献计量的科技名词工作生态构建及创新路径研究”(SWZX2022003)
0 引言
科技名词是指各种表达科学和技术概念的语言指称。“凡百工作,首重定名;每举其名,即知其事,斯为上矣”[1],严济慈先生早在20世纪30年代就曾撰文阐述名词术语规范化在科技进步中的重要作用和意义。全国科学技术名词审定委员会成立于1985年(原“全国自然科学名词审定委员会”,以下简称“全国科技名词委”),是经国务院授权,代表国家审定、规范科技名词的权威机构。全国科技名词委成立30多年来,已经审定公布了150种规范名词,基本涵盖了基础科学、工程技术、农林医学、社会科学和军事科学等学科大类。
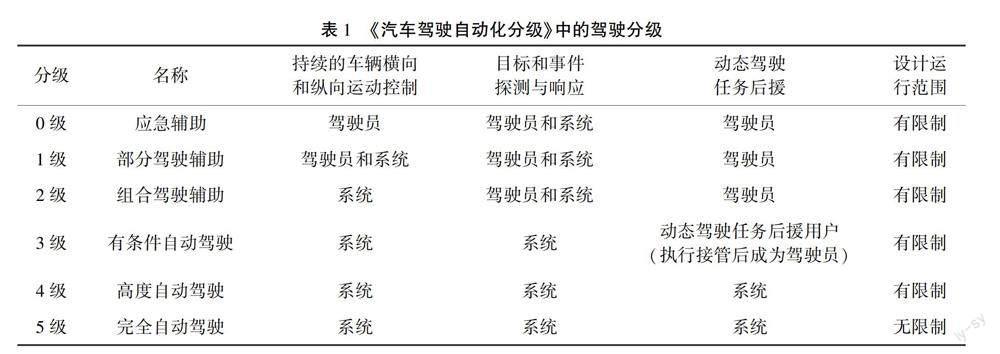
随着科学技术的持续进步,新兴的前沿交叉领域不断产生,新的科技名词、概念也大量同步产生,并广泛快速地传播。以自动驾驶为例,自动驾驶[2]是在20世纪被提出的概念,在当时受技術限制,仅处于试验阶段。到21世纪初,随着人工智能、车联网等技术的逐步成熟,自动驾驶技术在实际应用中快速发展,相关名词术语也在各类媒体中广泛传播。然而,对自动驾驶相关名词术语的过度宣传,造成人们对自动驾驶的功能产生了误解。因此,国家市场监督管理总局、国家标准化管理委员会于2022年3月1日实施了推荐标准《汽车驾驶自动化分级》(GB/T 40429—2021)[3],该标准规定了汽车驾驶自动化分级应遵循的原则、分级要素、各级别的定义和技术要求框架,将驾驶自动化等级划分为0~5级共6个级别(见表1),旨在解决我国汽车驾驶自动化分级的规范性问题。同时,该标准对23个驾驶自动化术语进行了解释(见表2),其中核心术语为驾驶自动化。但是,该标准也明确说明这23个术语和定义仅适用于当前文件,并不能体现自动驾驶领域名词术语的规范化体系。
因此,前沿交叉领域名词规范化的重要性和必要性不言而喻,而开展科技名词规范化工作首先是确定学科(或领域),其次是建立该学科(或领域)的概念体系,然后按照概念体系规范该学科(领域)的科技名词,其中最为核心的就是构建学科(或领域)的概念体系。但是,作为前沿交叉领域,其科技名词规范化工作相当复杂,一方面需要厘清与各学科交叉融合的内容,并构建名词体系;另一方面其自身的研究与发展处于不断的成长与变化中,名词体系的构建要与科学研究同步进行。
全国科技名词委以术语学理论和科技名词规范化工作实践为基础,制定了《科技名词审定工作原则与方法》[4],其中一条重要审定原则就是科技名词规范化工作首先应构建本学科的名词体系,而且该体系能囊括本学科全部基本概念。这个名词体系的构建关系到整个学科名词审定的系统性、平衡性与协调性。一个学科的名词体系要能厘清学科名词的审定范围,划清学科名词体系的层次结构,并划定各分支之间的“边界”,尤其是与其他分支存在交叉的内容,需要确定该内容归于哪个分支。这项审定业务工作一直都是依靠具有学科发展战略视野、精通学科专业知识的专家来完成。本文拟采用科技文献计量分析,研究自动驾驶技术与名词概念的关联,以及如何构建自动驾驶领域的名词体系,并探索名词体系的构建方法。
1 科技文献计量分析
科技文献是记录科研工作者用科学语言发表最新研究成果的重要媒介。科技文献计量是研究采用数学与统计学等定量方法对文献特征进行分析和处理,在一定程度上描述、评价某一研究领域的现状,反映该领域研究前沿和热点的一种方法[5]。通过这种方法,对某一领域的热门研究主题进行挖掘,可以快速地了解并掌握该领域的前沿知识、主流的理论和技术。近年来文献计量研究通过绘制工具将文字数据表格分析转化成更加形象易读的可视化知识图谱[6],常用软件如VOSviewer、CiteSpace、SPSS和TDA等。
1.1 研究对象
本文研究数据来自Web of Science核心合集,以自动驾驶技术为检索对象,因此检索式为:TS=(″autonomous driving″ or ″automated driving″ or ″self-driving″),文献类型为论文,共检索出1991—2021年的科技文献5087篇。检索时间为2022年7月8日。
1.2 研究工具
本研究使用VOSviewer知识图谱工具软件对样本文献数据进行计量分析[7-8]。VOSviewer是由荷兰莱顿大学科学技术研究中心的Nees Jan van Eck 和 Ludo Waltman在2010年联合开发的一款文献分析和可视化软件,可实现诸如关键词共现分析[9]、文献作者分析、研究机构分析和文献耦合分析等功能[10],并可将分析结果进行可视化展示。其中关键词共现分析是指关键词在同一篇文献中出现的次数越多,则代表它们表述的主题关系越密切。在全部的关键词网络中,联系强度大的关键词相互靠拢聚集在一起,形成概念相对独立的关键词聚类,进而可以根据聚类分析构建其名词体系。本次研究使用软件的版本是VOSviewer1.6.18。
2 自动驾驶名词体系构建
2.1 自动驾驶名词的范围
自动驾驶是一个涉及汽车工程、人工智能、计算机、微电子、自动化、通信等多学科的交叉领域。根据Web of Science的引文分析结果,自动驾驶领域内,发文量居前10的研究方向分别是工程、计算机科学、电信、交通运输、化学、仪器仪表、物理学、心理学、自动化控制系统、机器人学,发文量为4458篇,占总发文量的87.6%(图1)。
本文使用VOSviewer软件筛选文献中的关键词,在去除语义过宽和合并语义相同的词汇之后,将出现频次排名前20的关键词与全国科技名词委审定公布的规范名词进行比对,可以看出自动驾驶领域的名词既包括其他相关学科中的科技名词,也包括自动驾驶领域自身产生的新名词,如表3所示。可见自动驾驶名词体系是一个以本领域名词为核心,包含与之密切相关的多个学科名词的前沿交叉融合体系。
2.2 自动驾驶名词体系构建
2.2.1 自动驾驶名词聚类分析
科技文献中的关键词绝大多数属于科技名词的范畴,而且是经过作者筛选、能够代表该文献核心内容的科技名词,因此,通过关键词共现分析,所形成的聚类是由众多关联性强的名词组成的研究方向,如同“名词拼图”[11]。
本文通过VOSviewer软件将Web of Science核心合集中自动驾驶领域1991—2021年发表的文献中出现的关键词进行聚类分析,选取共现频次高于5的关键词,共有727个关键词,去除语义过于宽泛的词汇(如agency、comfort等),以及合并表述含义相同的词汇(如cav与connected and autonomous vehicles等)后,共保留564个关键词,所形成的可视化图谱中每一个节点代表一个关键词,节点之间的连线代表这两个关键词之间的共现关系,图中连线交叉密集、结构紧凑,说明该研究内容的关注度较高,关键词关联强度高,节点大小显示了关键词累计出现的频次高低。
本文首先采用默认聚类精度1(默认值),同时为了能够清晰显示图谱中的关键词及聚类结构,设置软件显示比例为0.5(最低),共形成9个聚类,其中最大的聚类(红色)包括了111个关键词,中间的7个聚类所包括的关键词数量分别是101、99、91、75、31、27和21,最小的聚类(粉色)只包括了8个关键词,如图2所示。此种聚类体系与科技名词规范化工作所要求的名词体系并不符合,各分支之间的“边界”并不清晰,存在分支之间相互交叉的现象,如radar、lidar、3d lidar等关键词均用于自动驾驶的环境感知功能,但却分布在多个不同的聚类之中。
为了研究自动驾驶领域关键词聚类的其他可能性,本文调整聚类精度(聚类精度越高,聚类数量越多),设置为0.5,同时为了能够清晰显示图谱中的关键词及聚类结构,设置软件显示比例为0.5(最低),共形成3个聚类,其中最大的聚类(红色)包括238个关键词,中间的聚类(绿色)包括206个关键词,最小的聚类(蓝色)包括120个关键词,如图3所示。
从以上两个关键词图谱初步对比来看,图2中的聚类较多,聚类之间相互交错,个别聚类显示不清晰,关键词相对分散;图3中的聚类较少,聚类显示清晰,关键词相对集中,基本符合名词体系构建的需要。为进一步判断关键词图谱二是否有助于名词体系的构建,还需研究自动驾驶技术。
2.2.2 自動驾驶名词体系构建
根据全国科技名词委的审定原则以及对自动驾驶名词与技术的分析,可以看出关键词图谱一的聚类不够清晰,存在各分支之间相互交叉,名词体系的层次结构不清的情况,而关键词图谱二的聚类相对清晰,相同研究领域的关键词也在同一聚类里,关键词图谱二更符合构建自动驾驶名词体系的需要。
聚类一:智能网联系统[12]分支。该聚类中的高频关键词,如自动驾驶汽车(autonomous vehicles)、机器学习(machine learning)、物联网(internet of things)和智能交通系统(intelligent transportation systems)等,这些关键词在文献中代表了自动驾驶研究中车辆、人工智能、互联网络和交通系统几个研究方向,并且几个研究方向关联紧密。因此,该聚类以自动驾驶汽车为基础,通过人工智能与云端网联平台对车辆的智能控制决策,结合车辆与道路的协同实现自动驾驶功能。聚类一中共现频次位于前40的关键词如表4所示。
单车自动驾驶的智能决策通过车上安装的传感器完成对环境的探测和定位功能[13]。计算决策一方面将传感器数据进行分析处理,实现对目标的识别;另一方面进行行为预测和全局路径规划、局部路径规划和即时动作规划,决定车辆当前及未来的运行轨迹。控制执行主要包括车辆的运动控制以及人机交互,决定每个执行器如电机、油门、刹车等控制信号。
车路协同自动驾驶[14]是在单车智能自动驾驶的基础上,通过先进的车、道路感知和定位设备(如摄像头、雷达等)对道路交通环境进行实时高精度感知定位,包括道路工程及配套附属设施,路侧通信设施(直连无线通信设施、蜂窝移动通信设施)和计算控制设施(边缘计算节点、各级云平台)等。通过车辆自动化、网络互联化和系统集成化,最终构建一个车路协同的智能交通系统。
车联网[15]是借助全新的信息和通信技术,实现车内、车与X(车、路、人、云等)连接的网络体系。其中,车与云平台间的通信是车辆通过卫星无线通信或移动蜂窝等无线通信技术实现与车联网服务平台的信息传输,接受平台下达的控制指令,实时共享车辆数据;车与车间的通信即车辆与车辆之间实现信息交流与信息共享,包括车辆位置、行驶速度等车辆状态信息,可用于判断道路车流状况;车与路间的通信借助地面道路固定通信设施来实现,用于监测道路路面状况,引导车辆选择最佳行驶路径;车与人间的通信是用户可以通过WiFi、蓝牙、蜂窝等无线通信手段与车辆进行信息沟通,使用户能通过对应的移动终端设备监测并控制车辆;车内设备间的通信是车辆内部各设备间的信息数据传输,用于对设备状态的实时检测与运行控制,建立数字化的车内控制系统。
聚类二:智能驾驶信息分支。该聚类中的高频关键词,如深度学习(deep learning)、目标探测(object detection)和同步定位与制图(simultaneous localization and mapping)等,这些关键词在文献中代表了自动驾驶车辆智能驾驶信息获取的研究方向。因此,该聚类以深度学习[16]为基础,通过环境感知[17]、高精度地图和定位技术[18]获取外部信息,进行信息分析实现自动驾驶的智能规划。聚类二中共现频次前40的关键词如表5所示。
环境感知与地图定位系统是由摄像头、激光雷达、毫米波雷达、高精度地图和高精度定位等组成,根据摄像头和GPS,自动收集信息绘制出高精度地图。系统通过传感器采集的信息进行图像处理,智能网络识别车辆周围障碍物,实现复杂道路自主躲避障碍、行车距离控制、车道线识别、导航等功能。系统可及时感知靠近车辆的方位、车速,对驾驶员的行驶意图进行预测。传感器主要包括车轮转速传感器、加速度传感器、微机械陀螺仪、转向盘转角传感器、超声波传感器、视觉传感器等,高精度地图与定位技术主要使用全球定位系统(GPS)、中国北斗卫星导航系统等,获取道路環境实时动态数据,以及同步地图与定位(SLAM),即一边计算自身位置,一边构建环境地图的过程。首先由感受传感器如里程计、陀螺仪等感知测量车辆轨迹,然后用激光雷达或视觉感知环境,通过主动或被动标识、地图匹配或导航信标进行定位。位置的计算方法包括三角测量法、三边测量法和模型匹配算法等。车辆在接收到环境感知系统的信息后进行融合,对道路、车辆、行人、交通标志和交通信号等进行识别,并按照从高精度地图路由寻址的结果,决策分析和判断车辆驾驶模式和将要执行的操作,对当前车辆进行规划(速度规划、朝向规划、加速度规划等),并产生相应的决策(跟车、换道、停车等)。
聚类三:人机协同驾驶[19]分支。该聚类中的高频关键词,如自动驾驶(autonomous driving)、自动驾驶系统(automated driving systems)、驾驶模拟器(driving simulator)和人机交互(human-automation interaction)等,这些关键词在文献中代表了自动驾驶车辆如何驾驶以及驾驶员与系统协同的研究方向。因此,该聚类以自动驾驶(autonomous driving)为基础,通过驾驶员的状态监测,驾驶员与车辆之间的人机交互[20],实现人机协同的自动驾驶。聚类三中共现频次前40的关键词如表6所示。
在国家标准《汽车驾驶自动化分级》中,将驾驶自动化等级划分为0~5级,其中0~3级都需要驾驶员与系统共同对车辆做出操控、响应的处理。人机协同控制是指驾驶员和智能控制系统同时在环,协同完成驾驶任务,大致分为三类:(1)通过人机交互增强驾驶员感知能力的智能驾驶辅助,这种智能辅助主要是指车载智能系统经由雷达、摄像头等感知设备进行人机交互,获得驾驶员不能了解或了解不全面的交通信息,通过智能系统分析并对驾驶员进行视听触多方位的预警,达到机器增强驾驶员感知的初级人机协同模式;(2)基于特定场景的人机驾驶权切换,在某些场景下,车辆控制超出驾驶员能力之外时,智能系统获取车辆驾驶权,相反,当车辆控制超出智能系统能力范围的工况发生时,系统需对驾驶员进行唤醒并移交控制权,如自动紧急制动系统、自适应巡航系统和自动泊车系统等;(3)人机共驾车辆的驾驶权动态分配则是人机协同自动驾驶的未来发展方向,会形成人机并行控制的复杂动态交互关系。另外,在人机协同控制的研究中,驾驶员的状态监测、意图识别和驾驶行为建模也是非常重要的内容。
基于以上分析,自动驾驶名词体系由“智能网联系统”“智能驾驶信息”“人机协同驾驶”3个一级分支和“智能决策规划”“车辆控制执行”“车路协同系统”“车联网技术”“环境感知”“地图与定位”“人机交互”“人机共驾”8个二级分支组成,如图4所示。
3 名词体系构建方法
《辞海》(第七版)对“体系”做出如下定义:“体系是若干有关事物互相联系、互相制约而构成的一个整体。如:理论体系;语法体系;工业体系。”[21]
由此,可以定义名词体系为:关于研究对象某些方面的联系的名词,聚集形成名词单元,规范化的名词单元通过相互联系、相互制约而构成的一个整体。
构建一个学科的名词体系,首先找到名词体系核心,即一个关于某学科知识的总称,并根据该学科的研究内容与任务,明确该学科名词体系构建的范围。其次确定领域,了解研究场景,列出该学科可能出现的名词、概念以及关系列表,分析研究知识单元——科技名词,对该学科越了解,所建的名词体系越完善。再次确定知识体系结构,当列出来所有的名词、概念以及关系列表之后,需要对名词进行层次结构的分类。确定分类层级通常有两种方法:自顶向下和自底向上。自顶向下就是从最核心的名词开始,逐层扩展添加各层名词;自底向上则是相反的过程。最后确定名词的概念以及名词之间的关系。做到这一步,名词体系就基本构建完成了。然而,新的研究、技术与名詞的产生,必然会对原来的名词体系造成冲击,需要勇于打破现有的名词体系,接受新的知识与概念,构建新的名词体系。构建流程如图5所示。
科技名词规范化工作是一项以学科为抓手的基础性工作。一个学科的知识体系是由该学科的一系列知识单元组合而成,且是具有秩序的知识结构,这些知识单元的外在表现形式就是科技名词,故知识体系[22-23]是形成名词体系的基础和前提。在以前的科技名词规范化工作中,名词体系构建是依靠具有学科发展战略视野、精通该学科专业知识的专家来主导完成。随着文献计量方法与可视化知识图谱技术的日渐成熟,科技文献中蕴含着大量的前沿交叉研究成果,本文尝试将其引入到名词规范化工作中,作为一种构建新兴的交叉前沿学科(领域)名词体系的有益探索,同时通过深入研究分析前沿学科的发展,为前沿学科的名词规范化工作奠定基础。
4 结语
自动驾驶技术近年来得到了飞速发展,而自动驾驶的名词规范化工作尚未全面展开。作为新兴的研究领域,自动驾驶有其特殊性,一方面自动驾驶属于多学科交叉领域,另一方面自动驾驶自身尚未形成一个学科,不具有学科体系。科技名词规范化的传统工作模式是以学科为抓手,在学科体系的基础上,依靠专家构建该学科的名词体系并开展科技名词审定工作。本文采用科技文献计量方法,针对新兴的前沿交叉领域——自动驾驶,开展自动驾驶名词体系的研究。本项研究分析了不同文献计量参数条件下的自动驾驶关键词聚类,选取符合自动驾驶名词规范化工作的聚类,构建自动驾驶这一前沿学科的规范化名词体系。同时,本文尝试了基于文献计量的名词体系构建方法,是对前沿交叉学科领域的名词规范化工作的一种创新性探索,下一步,将基于文献计量的科技名词规范化的“工作生态”进行研究。
参考文献
[1] 严济慈.论公分公分公分[J].东方杂志,1935,32(3):79-82.
[2] 王金强,黄航,郅朋,等. 自动驾驶发展与关键技术综述[J]. 电子技术应用,2019,45(6):28-36.
[3] 全国汽车标准化技术委员会.汽车驾驶自动化分级:GB/T 40429—2021[S].北京:中国标准出版社,2021:1-16.
[4] 全国科学技术名词审定委员会.关于下发《全国科学技术名词审定委员会组织条例》和《全国科学技术名词审定委员会科学技术名词审定原则及方法》的通知[Z]. 科词委字〔2010〕031号.
[5] 邱均平.文献计量学[M].北京:科学技术文献出版社,1988.
[6] NICOLAISEN J.Bibliometrics and Citation Analysis: From the Science Citation Index to Cybermetrics [J].Journal of the American Society for Information Science and Techno-logy, 2010,61(1): 205-207.
[7] 高凯.文献计量分析软件VOSviewer的应用研究[J].科技情报开发与经济,2015,25(12):95-98.
[8] 刘金花,崔金梅. 基于VOSviewer的领域性热门研究主题挖掘[J].情报探索,2016(2):13-16.
[9] 冯璐,冷伏海. 共词分析方法理论进展[J].中国图书馆学报,2006(2):88-92.
[10] KEVIN W, BOYACK, KLAVANS R. Co-Citation Analysis, Bibliographic Coupling, and Direct Citation: Which Citation Approach Represents the Research Front Most Accurately? [J]. Journal of the American Society for Information Science and Technology,2010,61(12): 2389-2404.
[11] 张奕骏,张晖,肖逸影,等. 基于科学知识图谱的汽车智能化发展研究[C]//世界交通运输大会执委会.世界交通运输工程技术论坛(WTC2021)论文集.北京:人民交通出版社,2021:1698-1703.
[12] 李克强,戴一凡,李升波,等.智能网联汽车( ICV ) 技术的发展现状及趋势[J]. 汽车安全与节能学报,2017,8(1):1-14.
[13] 彭育辉,江铭,马中原,等.汽车自动驾驶关键技术研究进展[J].福州大学学报(自然科学版),2021,49(5):691-703.
[14] 张云顺,华国栋,李宁,等.基于车路协同的智能驾驶研究综述[J].汽车文摘,2022(6): 49-57.
[15] 肖瑶,刘会衡,程晓红.车联网关键技术及其发展趋势与挑战[J].通信技术,2021,54(1):1-8.
[16] 张新钰,高洪波,赵建辉,等. 基于深度学习的自动驾驶技术综述[J]. 清华大学学报(自然科学版),2018,58(4):438-444.
[17] 崔胜民.智能网联汽车新技术[M].北京:化学工业出版社,2016.
[18] 《中国公路学报》编辑部. 中国汽车工程学术研究综述·2017[J].中国公路学报,2017,30(6):1-197.
[19] 胡云峰,曲婷,刘俊,等. 智能汽車人机协同控制的研究现状与展望[J].自动化学报,2019,45(7):1261-1280.
[20] 邹启杰,李昊宇,张汝波,等. 自主驾驶的人机交互控制[J].山东大学学报(工学版),2019,49(2):23-33.
[21] 辞海编辑委员会.辞海·语词分册[DB/OL].[2022-05-10].上海:上海辞书出版社,2021. https://www.cihai.com.cn.
[22] 李景,孟连生.构建知识本体方法体系的比较研究[J].现代图书情报技术,2004(7):17-22.
[23] 张晓林,李宇.描述知识组织体系的元数据[J].图书情报工作,2002(2):64-69.
作者简介:史金鹏(1980—),男,硕士,全国科学技术名词审定委员会事务中心审定业务二处副处长,承担物质科学、工程技术等领域的科技名词规范化及海峡两岸科技名词对照工作。从事先进制造与科技名词规范化理论与实践方面的研究,参与先进制造、产业咨询、国外技术标准翻译项目等19项,主持、参与国家语言文字工作委员会、中国科学院文献情报中心、全国科学技术名词审定委员会事务中心等的项目8项,组织审定公布6部科技名词。通信方式:shijp@cnterm.cn。
王海(1985—),女,博士,副研究员,全国科学技术名词审定委员会事务中心审定业务一处处长,负责生命科学和地球科学等领域的科技名词规范化及海峡两岸科技名词对照工作。主要研究方向为科技术语规范化、术语理论与实践、海峡两岸名词对照等。主持全国科学技术名词审定委员会事务中心重点项目1项,参与国家语言文字工作委员会基金项目2项、全国科学技术名词审定委员会事务中心项目2项,参与《两岸科学技术常用词典》《中华科学技术大词典》《大数据百科术语辞典》《学习强国·每日科技名词》等项目,组织审定公布6部科技名词。通信方式:wangh@cnterm.cn。
杜振雷(1985—),男,硕士,全国科学技术名词审定委员会事务中心宣传推广处副处长、“学习强国·每日科技名词”编辑部主任、全国语言与术语标准化技术委员会计算机辅助术语工作分技术委员会委员。主要研究方向为术语管理与传播、自然语言处理。主持“术语在线”术语知识服务平台运营,主持、参与国家语言文字工作委员会基金项目3项、国家自然科学基金项目2项,参与起草新闻出版行业标准1项,组织出版《学习强国·每日科技名词》系列图书。通信方式:duzl@cnterm.cn。
猜你喜欢
学生天地(2020年5期)2020-08-25
电子测试(2018年10期)2018-06-26
电子测试(2017年15期)2017-12-18
商周刊(2017年23期)2017-11-24
雷达学报(2017年6期)2017-03-26
汽车博览(2016年9期)2016-10-18
交通建设与管理(2015年15期)2015-03-20
中国卫生产业(2015年10期)2015-03-11
中国当代医药(2015年9期)2015-03-01
电子设计工程(2015年6期)2015-02-27