异质分数阶非线性多智能体系统的预设时间一致性*
2023-06-06 07:27:02龚平
应用数学和力学 2023年5期
龚 平
(广东外语外贸大学 数学与统计学院, 广州 510006)
0 引 言
近年来,基于多智能体系统的分布式协同控制方法被应用于移动机器人[1]、无人机[2]、分布式传感器网络[3]和交通运输系统[4]等不同应用领域.这种控制方法的广泛应用是因为其克服了集中控制体系结构的某些能力的限制,如设备和传感器的空间分布,短距离通信和计算负担[5].分布式一致性问题[6-7]作为分布式协同控制的一个基本问题和热点问题,它要求每个智能体仅使用或获得有限局部信息,使得所有智能体的状态在任意初始条件下达成一致.文献[8-9]对多智能体系统一致性问题进行了综述,从中可知多智能体系统的分布式一致性问题研究成果丰富,但也存在一些未解决的问题.
分数阶微积分是传统整数阶微积分的扩展,它为描述各种材料和过程的记忆和遗传特性提供了一个极好的工具.近几十年来,分数阶微积分引起广泛关注并被应用于信号学、黏弹性理论、流体力学、计算机网络、电路和控制理论等领域[10-11].分数阶微积分数学模型的应用可以提高对实际动态系统的表征、设计以及控制能力,分数阶微积分在控制领域的应用成为一个研究热点.根据智能体工作环境的复杂性,许多自然现象的动力学特性不能应用整数阶方程描述,更适合用分数阶(非整数阶)动力学的智能个体合作行为来解释.例如在有大量微生物和黏性物质的海底工作的水下机器人和在复杂太空环境运行的无人驾驶飞行器等[12].基于此,分数阶多智能体系统分布式一致性问题研究已经得到了相当多的关注,如无领导者的分布式一致性问题[13-17]和有一个领导者的分布式一致性跟踪问题[18-22].
收敛速率是多智能体系统一致性算法设计的一个重要性能指标.存在的一致性算法大多是渐近收敛算法[8],这意味着智能体状态只能在无限时间内趋于一致.若需要及时完成某项控制任务,渐近收敛算法显然无法满足需求,这就需要设计有限时间内收敛的算法.针对分数阶多智能体系统,文献[16,21]设计了含分数次幂的有限时间收敛算法,并得到了依赖于系统参数和初始值的算法收敛时间上确界估计.有限时间收敛算法通过调节系统参数可以满足某一有限收敛时间的要求.基于固定时间稳定性理论[9,23],文献[24-30]针对不同阶数动态的多智能体系统设计了含分数次幂的固定时间一致性算法,并得到了仅依赖系统参数的算法收敛时间上确界估计.值得注意的是,固定时间控制算法和有限时间控制算法一样,只能得到依赖于系统参数的收敛时间上确界估计,因此具有保守性.另一方面,为了减小收敛时间估计值往往需要增加控制参数值,从而需要更大的控制能量或成本.为了实现不依赖于任何系统参数和初始值的收敛时间,文献[31-32]分别针对高阶单积分系统和二阶线性多智能体系统发展了基于时变函数的预设时间控制方法.此外,文献[33]针对一阶线性多智能体系统提出了一种基于时变函数的预先指定有限时间控制算法,实现了智能体在无需依赖系统参数和初值的指定有限时间达到一致.进一步地,文献[34]研究了具有饱和执行器的多智能体系统的指定时间一致性跟踪问题.我们注意到,已有的预设(或指定)时间控制方法要求所有智能体都具有线性或同质动态,但通常异质非线性动态广泛存在于现实场景[21].此外,由于传感器的感知范围不均匀,智能体之间的通信拓扑通常由非对称有向图而不是对称无向图来描述[20].基于预设(或指定)时间控制方法的已有研究成果大多基于无向拓扑下的线性动态多智能体系统,具有较大局限性.据笔者所知,目前还没有文献考虑具有异质非线性动态和有向拓扑的多智能体系统的预设时间一致性问题,虽然异质非线性动态和有向拓扑都增加了问题的研究难度,但更符合实际工程应用背景,具有重要而广泛的工程应用价值.
基于以上观察,本文研究了一类异质分数阶非线性多智能体系统在连通无向图和含生成树有向图情况下的预设时间一致性问题.一个主要问题是一些用于同质线性多智能体系统框架的工具不能用于异质非线性多智能体系统框架; 此外,异质分数阶非线性多智能体系统的复杂性与有向网络图的非对称性和局部性,都增加了解决本文研究问题的难度.为了处理具有复杂动态的异质分数阶非线性多智能体系统,在控制器的设计中同时引入了具有分数阶动态的滤波变量,一类非负时变函数和符号函数,将异质分数阶非线性多智能体系统在某个预设时刻转化成了易处理的一阶线性多智能体系统.通过矩阵变换方法来处理含生成树有向图中非对称的Laplace矩阵.
本文的主要贡献如下: 1)与文献[16,21,24-30]中设计的含分数次幂的有限时间或固定时间控制算法比较,本文设计的预设时间控制算法设计简单,控制成本低,收敛时间可以预先指定且不依赖于系统参数和初值.此外,文献[24-25,27-29]中仅考虑无向图,而本文考虑了含生成树的有向图.2)已有的预设时间一致性问题成果仅限于具有整数阶动态的多智能体系统,本文考虑了具有异质分数阶非线性动态的多智能体系统.本文将已有的预设时间一致性问题研究成果推广到更一般的,具有异质分数阶非线性动态的多智能体系统,丰富和发展了多智能体系统分布式协同控制理论和方法.
1 预 备 知 识
本节将给出符号说明、分数阶算子、符号图论和一些引理等预备知识.
1.1 符号说明
1.2 分数阶算子
定义1、定义2和引理1如下,可参见文献[11].
定义1 函数f(t)∈C([0,∞),)的α阶积分为
定义2 函数f(t)∈C([0,∞),)的Caputo分数阶(α阶,0<α≤1)导数为
引理1 当0<α≤1和f(t)∈C([0,∞),)时,有和Dα[Iαf(t)]=f(t).
1.3 代数图理论

1.4 重要引理
引理2[33]令h(t,T)∈为一个非负时变函数,如果存在一个常数γ>0使得
其中
(1)
(2)
m>2为一个实数,T>0为预设时刻.则当t≥T时,有limt→T-V(t)=0和V(t)≡0,这意味着V(t)的原点是全局预设时间稳定.此外
(3)
引理3[35]如果图G为包含有向生成树的有向图,L为图G的Laplace矩阵,
(4)
则存在某个全列矩阵M∈N×(N-1)和某个正定矩阵Q∈(N-1)×(N-1)使得L=ME和
QEM+(QEM)T>δQ
成立,其中0<δ<2mini∈{1,2,…,N-1}Re(λi(EM)),Re(λi(EM))表示矩阵EM的第i个特征值的实部.
2 系统模型和问题描述
考虑由N个智能体组成一个多智能体系统.令G为N个智能体之间的网络拓扑图.考虑如下异质分数阶非线性多智能体系统的预设时间一致性问题:
Dαxi(t)=ui(t)+fi(xi,t), 0<α≤1,i∈I={1,2,…,N},
(5)
其中Dαxi(t)=[Dαxi1(t),Dαxi2(t),…,Dαxin(t)]T∈n,xi(t)=[xi1(t),xi2(t),…,xin(t)]T∈n,xi(t)和ui(t)∈n分别表示智能体i的状态和控制输入,异质非线性函数fi(xi,t)∈n表示智能体i的异质非线性动态或异质时变扰动.
定义3(预设时间一致性[32-33]) 异质分数阶非线性多智能体系统(5)达到预设时间一致性,如果对于任意的初始状态xi(0)都有
(6)
成立,其中T>0为一个预先设定的时间点或时刻.
本文要解决的问题是: 为每个智能体i∈I设计一个分布式控制器ui,使得异质分数阶非线性多智能体系统(5)达到预设时间一致性,即实现控制目标(6).
下文中,为了简便将省去(t),如将xi(t)简写为xi等.
3 主 要 结 论
在本节中,通过设计基于时变函数的预设时间一致性算法,先解决分数阶非线性多智能体系统在连通无向图情况下的预设时间一致性问题,然后把上述结论拓展到含生成树的有向图情况.
3.1 连通无向网络图的预设时间一致性
本小节研究异质分数阶非线性多智能体系统(5)的网络拓扑图和异质非线性函数满足如下假设.
假设1[33]网络拓扑图G为连通的无向图.

注1 假设1中连通无向图的假设条件在无向网络中是一个基本的假设条件,如文献[33]; 此外,在下一小节中,考虑了更一般的含生成树有向图情况,进一步弱化了条件假设1.本文中为了保证控制输入信号全局有界,假设异质非线性函数fi(xi,t)满足假设2.当fi(xi,t)有界时显然满足假设2,存在很多有界函数fi(xi,t),如fi(xi,t)=(aiarctan(xi)+gi)3,其中ai为常数;gi=[gi1,gi2,…,gin]T∈n,gik为icos(t),ei-tsin(t),(i+t)-2或i2tanh(t)等有界的时变函数,k=1,2,…,n.注意到,当fi(xi,t)表示异质时变扰动时,其有界性假设是一个常见的假设条件,见文献[32].
当假设1成立时,则图G的Laplace矩阵L对称,且对称的Laplace矩阵L有N个特征值λi满足0=λ1<λ2≤…≤λN,详见文献[6].
首先,引入两类滤波变量yi和zi分别满足如下分数阶微分方程:
D1-αyi=xi-zi,
(7)
(8)

令
(9)
若图G为连通的无向图,考虑如下基于时变函数的预设时间分布式一致性控制算法(i∈I):
(10)
(11)
γj>0,j=1,2,b≥1/λ2,时变函数h(t,Tj)和exi分别由式(1)和(9)定义,T2>T1>0为预先设定时间点(时刻).
注2 实际上,由引理2中定义的非负时变函数h(t,T)可知
(12)

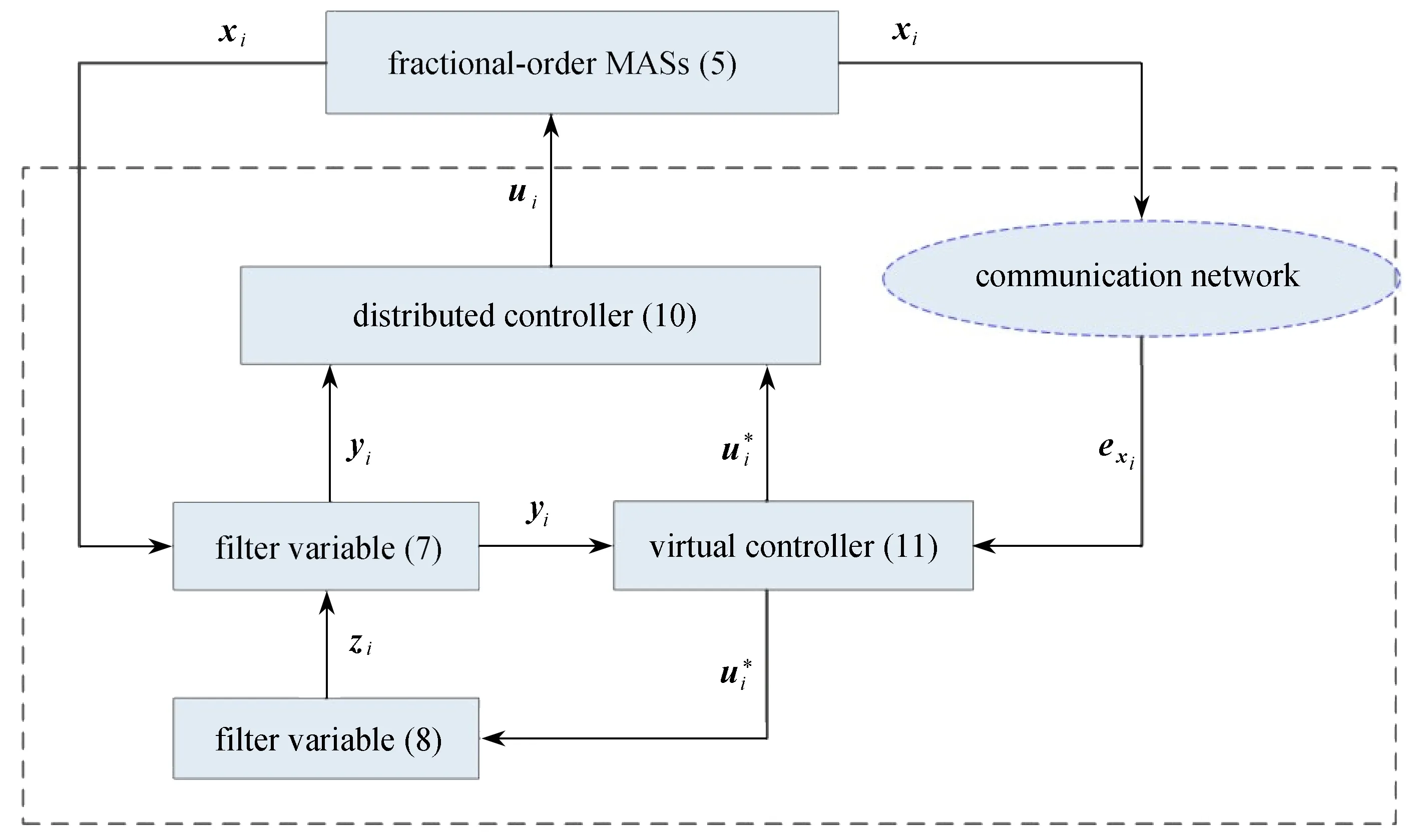
图1 闭环分数阶多智能体系统的框架
定理1 如果假设1和假设2成立,考虑分布式控制器(10),滤波变量(7)、(8)和虚拟控制器(11),则异质分数阶非线性多智能体系统(5)在时刻t=T2时达到预设时间一致性.此外,控制输入信号全局有界.
证明本定理的证明分为如下3步: 第一步, 证明滤波变量yi在原点是全局预设时间稳定; 第二步, 证明多智能体系统(5)的状态xi达到预设时间一致性, 即实现控制目标(6); 第三步, 证明控制输入ui全局有界.
第1步证明滤波变量yi在原点是全局预设时间稳定.
利用引理1,分数阶微分方程(7)和(8),有
(13)
将控制器(10)代入式(13)得
(14)
考虑Lyapunov函数
(15)
由式(14)和假设2可得到Lyapunov函数V1(t)的导数满足
(16)
(17)

(18)


(19)
将虚拟控制器(11)代入式(19)有
(20)
第2步证明多智能体系统状态xi达到预设时间一致性.
由假设1可知,Laplace矩阵L有N个特征值λ1,λ2,…,λN满足0=λ1<λ2≤…≤λN.令
Λ=diag(λ0,λ2,…,λN),Λ0=diag(0,λ2,…,λN),
其中λ0>0为某一常数.易知ex=(L⊗In)x.假设1成立,则存在一个酉矩阵U∈N×N满足UTU=UUT=IN,使得L=UTΛ0U.考虑如下Lyapunov函数:
(21)
注意到UTΛ-1U为一个正定矩阵.由文献[6]可知V2(t)=0当且仅当xi=xj,∀i,j∈I.取Lyaunov函数(21)的导数,有
(22)
事实上,由式(22)可知Lyapunov函数(21)等价于V2(t)=(1/2)xT(L⊗In)x.将式(20)代入式(22),可得
(23)
(24)
第3步证明控制输入ui全局有界.
下面分3种情况证明.

(25)
联立式(14)和(18)可得
(26)

(27)
(28)

(29)

□

(S1)设计滤波变量(7)和(8),将分数阶非线性多智能体系统(5)转化成含滤波变量的分数阶多智能体系统:
(30)
(31)
(32)
(S4)设计vi,即设计预设时间虚拟控制器(11)使得一阶线性多智能体系统(32)达到预设时间一致性.
3.2 含生成树有向网络图的预设时间一致性
本小节把上一小节中的连通无向网络图推广到更一般的含生成树有向网络图,即研究分数阶非线性多智能体系统(5)的网络拓扑图满足如下假设.
假设3 假设网络拓扑图G为含一条有向生成树的有向图.
若假设3成立,则由定理3可知,存在全列矩阵M∈N×(N-1)和正定矩阵Q∈(N-1)×(N-1)使得L=ME和
QEM+(QEM)T>δQ
(33)
成立,其中0<δ<2mini∈{1,2,…,N-1}Re(λi(EM)),Re(λi(EM))表示矩阵EM的第i个特征值的实部.
若图G为含有向生成树的有向图,考虑如下基于时变函数的预设时间分布式一致性控制算法(i∈I):
(34)
(35)
γl>0,l=3,4,c≥2/δ,时变函数h(t,Tl)和exi分别由式(1)和(9)定义,T4>T3>0为预先设定的时间点(时刻).
定理2 如果假设2和假设3成立,考虑分布式控制器(34),滤波变量(7)、(8)和虚拟控制器(35),则异质分数阶非线性多智能体系统(5)在时刻t=T4时达到预设时间一致性.此外,控制输入信号全局有界.
证明本定理的证明分为如下3步: 第一步,证明滤波变量yi在原点是全局预设时间稳定;第二步,证明多智能体系统(5)达到预设时间一致性;第三步,证明控制输入信号全局有界.
(36)
下面证明多智能体系统(5)达到预设时间一致性.令
选取Lyapunov函数为
(37)
(4)定义的矩阵E和式(36)可知
(38)
沿着轨迹(38),可得Lyapunov函数(37)的导数满足
(39)
其中最后一个不等式成立因为c≥2/δ.然后利用引理2知
(40)
□
特别地,当α=1时,分数阶非线性多智能体系统(5)简化为如下一阶非线性多智能体系统:
(41)
由定理2可直接得到如下定理.
定理3 如果假设2和假设3成立,则一阶非线性多智能体系统(41)在时刻t=T6时达到预设时间一致性,当
(42)

yi=xi-zi,
(43)
(44)
γp>0,p=5,6,d>2/δ,时变函数h(t,Tp)和exi分别由式(1)和(9)定义,T6>T5>0为预先设定时间点(时刻).此外,控制输入信号全局有界.
注6 注意到文献[16,21,24-30]中设计了含分数次幂的有限或固定时间控制器,并得到了依赖于系统初值或参数的收敛时间的上确界值估计.因收敛时间上确界值估计依赖于系统初值或参数而具有保守性,当无法预先观测到系统初值或系统参数不可测时就无法保证规定的收敛时间,从而无法及时完成某项控制任务.本文设计的基于时变函数的分布式控制算法(10)和(34)能在某一时刻实现一致性控制,该收敛时刻由时变函数预先给定且不依赖于系统初值和参数.因此本文设计的基于时变函数的分布式控制算法(10)和(34)能够保证预设收敛时间,从而及时完成某项控制任务.
注7 虽然本文设计的控制算法(10)和(34)能够以分布式的方式在预先给定的独立于系统参数和初值的时刻实现低成本和零误差的一致性控制,但算法(10)和(34)的控制增益依赖于全局信息,如b≥1/λ2和c≥2/δ.因此算法(10)和(34)都不是完全分布式的.如何消除本文设计的预设时间一致性算法中控制增益对全局信息的依赖性,是未来的一个重要研究课题.
4 仿 真 实 例
例1 注意到定理1和定理3都是定理2的一种特殊情况, 本例只验证定理2的理论结果.为了验证定理2中理论结果的有效性, 考虑如图2所示的6个智能体之间的含生成树有向图G,其中权重已在图中给出.令
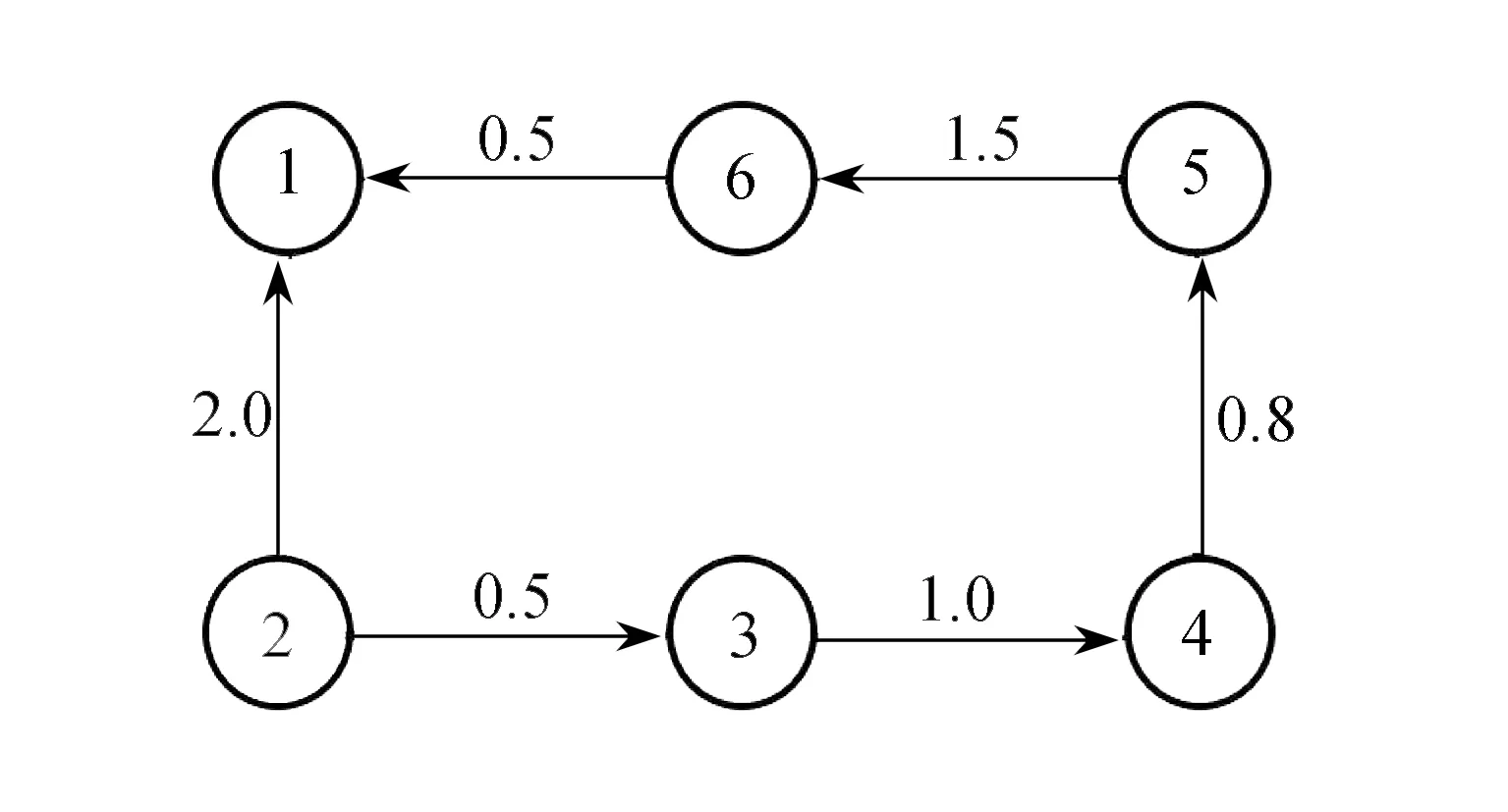
图2 含生成树有向图G
易知假设2和假设3都成立.此外,为了比较分数阶参数α对系统控制性能的影响,我们考虑具有不同阶数而其他参数和初值都相同的控制算法(34)和控制算法(42)(即考虑定理2和定理3中的控制算法).定理2中设计的控制算法的参数和初值分别选取为:α=0.8,γ3=γ4=1,m=3,T3=0.8 s,T4=2 s,
通过计算可得mini∈{1,2,…,5}Re(λi(EM))=0.5,故取δ=0.5和c=5>2/δ,
[x1(0),x2(0),…,x6(0)]=[1,5,-3,-4,3,2],
[y1(0),y2(0),…,y6(0)]=[5,-1,3,-5,1,-3],
[z1(0),z2(0),…,z6(0)]=[-1,1,2,-2,-3,3].


图3 当α=0.8时,滤波变量yi和一致性误差的轨迹
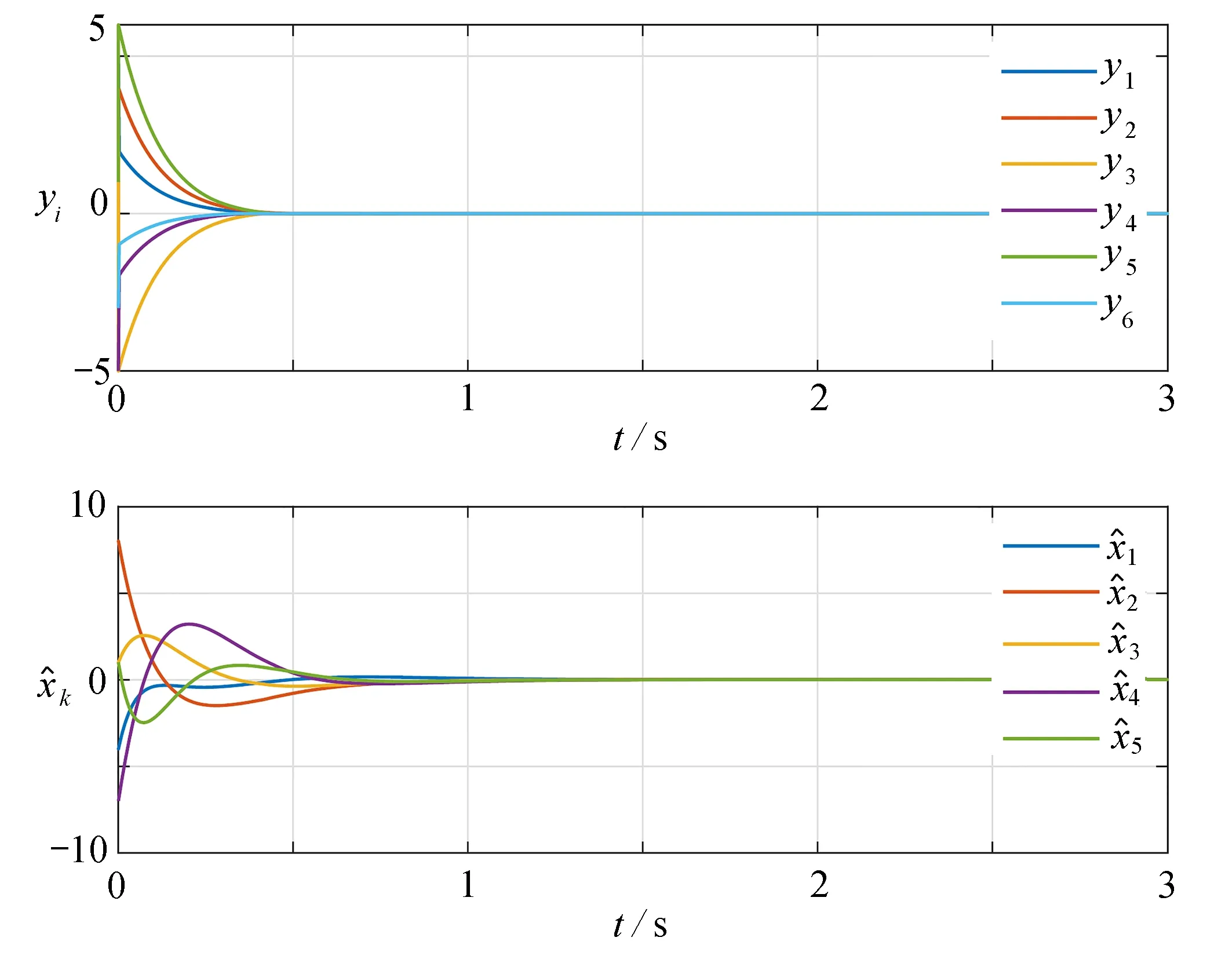
图4 当α=1时,滤波变量yi和一致性误差的轨迹

图5 当α=0.8时,控制器和ui的轨迹
进一步观察比较图5和图6可知,分数阶多智能体系统(α=0.8)比一阶多智能体系统(α=1)在达到预设时间一致性时所需消耗的控制能量更少,这说明分数阶控制算法能够获得比传统整数阶控制算法更好的控制性能.此外,我们注意到图5和图6中控制器ui在零附近线条比较粗,这是因为控制器ui含有在零点不连续的符号函数,而不连续符号函数易引起抖振现象,从而导致控制器ui在零附近线条比较粗.

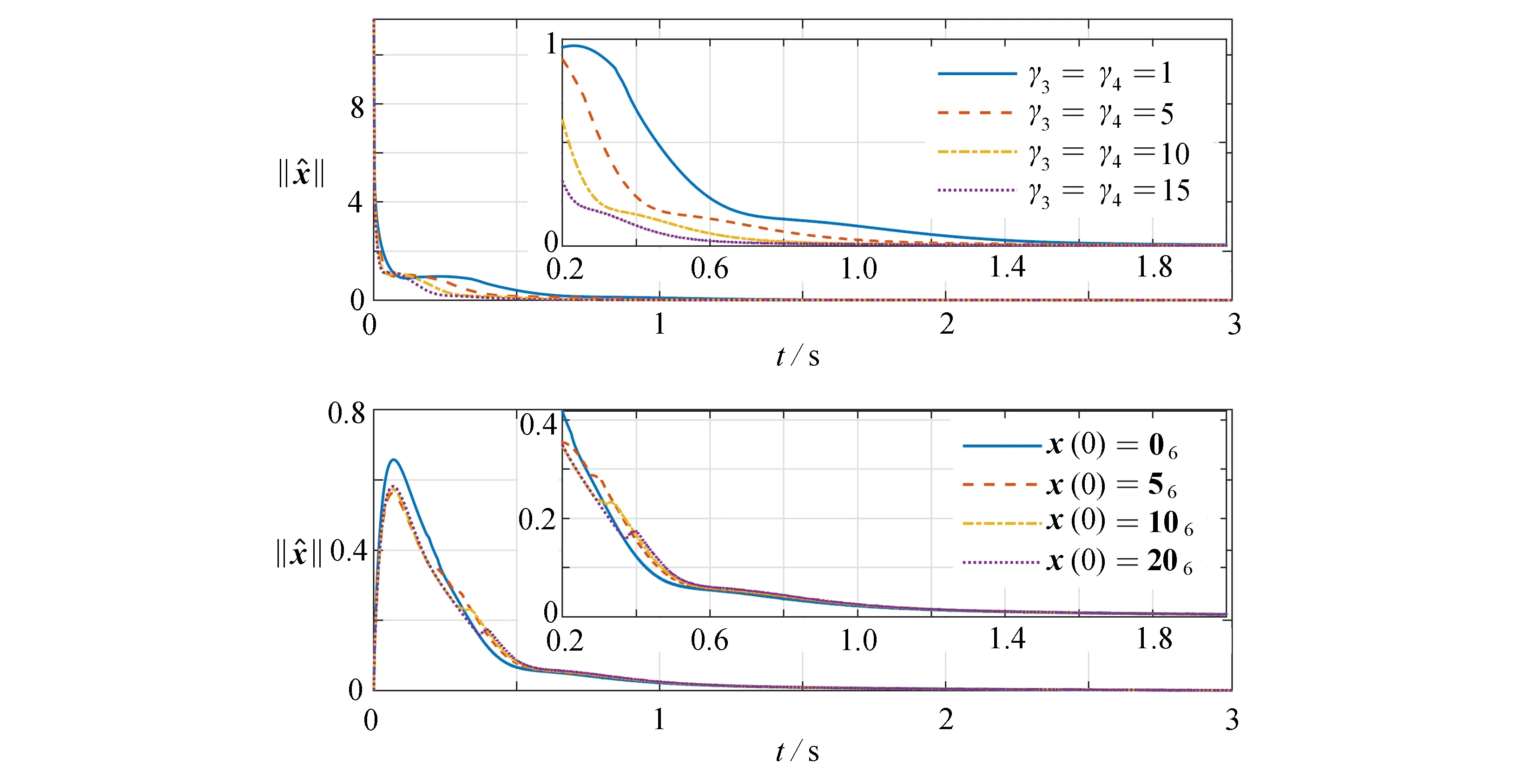
图7 取不同参数γ3,γ4和初值x(0)时,一致性误差的轨迹
注8 值得注意的是,文献[16,21,24-30]中设计了含分数次幂的有限时间或固定时间控制器,并得到了算法收敛时间的上确界估计值,该上确界估计值依赖于系统参数且估计具有保守性.为了得到较小的上确界估计值需要选取较大的控制增益, 从而需要更大的控制能量或控制成本.与文献[16,21,24-30]中设计的有限时间或固定时间控制器比较, 本文设计的预设时间控制器具有如下优点: 1)收敛时间与系统参数和初值无关; 2)能够预先保证精确的收敛时间; 3)低控制成本; 4)设计简单.
5 结 论
本文研究了一类异质分数阶非线性多智能体系统的预设时间一致性问题.当多智能体网络图是连通无向图和含生成树的有向图时,通过引入滤波变量和一类非负时变函数,分别设计了实现闭环系统精确预设时间一致性控制的分布式控制器.最后,通过仿真实例验证了所提出的预设时间控制算法的有效性.把本文的结果推广到更高阶的异质分数阶非线性多智能体系统中,是未来一个有趣的研究方向.此外,如何设计连续的控制算法,以消除本文设计的不连续算法容易引起的抖振现象,亦是未来的一个研究方向.
猜你喜欢
制造技术与机床(2017年6期)2018-01-19 02:41:07
智富时代(2017年4期)2017-04-27 17:08:47
广东石油化工学院学报(2016年6期)2016-05-17 05:17:43
云南师范大学学报(自然科学版)(2015年5期)2015-12-26 12:46:16
中国铁道科学(2015年4期)2015-06-21 06:46:08
中央民族大学学报(自然科学版)(2015年2期)2015-06-09 08:45:26
电源技术(2015年9期)2015-06-05 09:36:06
物理实验(2015年10期)2015-02-28 17:36:52
组合机床与自动化加工技术(2014年12期)2014-03-01 02:22:54
上海金属(2013年4期)2013-12-20 07:57:17