全天候全景监控摄像用光学系统设计
2023-06-05 09:21:48王晓檬王春艳赵义武
应用光学 2023年3期
王晓檬,陈 宇,王春艳,赵义武,孙 昊,刘 欢,张 桐
(1.长春理工大学 光电工程学院,吉林 长春 130022;2.中国移动通信集团吉林有限公司长春分公司,吉林 长春 130022)
引言
随着时代的发展,全景光学系统备受安防监控领域青睐[1]。目前采用全景观测的器件主要是鱼眼镜头,可获得接近或大于半球的视场[2-3],但边缘视场存在很大的负畸变,位于此区域的目标很难分辨,且第一片弯月形透镜的口径随着视场的增大会急剧增大,增加了生产成本。折反射全景成像系统是另一种实现全景观测的方法,通常采用普通镜头加前置反射镜组合的结构形式[4-5],虽然结构简单,但是反射镜面型复杂,装配公差严格,且大视场下反射镜体积较大,难以满足监控系统结构紧凑要求。全景环带光学系统(panoramic annular lens,PAL)是一种新型的全景观测系统[6],由匈牙利布达佩斯大学Greguss 教授团队于1986年首先提出[7],将2 个反射面和2 个折射面集成到一个模块上,可对围绕光轴360°侧向视场范围的场景成平面的环形像[8]。近几年,长春光机所也对全景环带镜头进行了研究和应用,设计了视场角为360°×(65°~95°),总长为69.7 mm 的周视监控全景镜头[9]。2015 年,周向东博士利用Q-type 非球面设计了一款视场角为360°×(30°~110°),F数为5,系统总长为28.7 mm 的全景环带光学系统[10]。2016 年,浙江大学姚远提出使用多非球面扩大视场和控制畸变,设计了具有水平方向上对称视场的全景环带成像系统[11]。全景环带光学系统能够在较小的体积下获得很大的视场,且f-θ畸变小,像面照度均匀性好,在监控领域具有广泛的应用前景。因此,本文采用全景环带系统结构形式作为初始结构,鉴于日夜成像的监控要求,需要该广角镜头带有红外功能[12],搭配IR-CUT 双滤光片(红外截止和全透光谱滤光片),可广泛应用于零售店、银行等小视距、大视角的场所。
1 全景环带镜头设计原理
传统光学系统成像是基于中心投影定理,物与像满足y′=f′tanθ的一一映射关系。本文设计的全景环带成像系统是一种比较新颖的成像方式,无需转动镜头,即可以实现360°目标的实时监测。该成像方式基于平面圆柱投影法原理[13],如图1 所示。将图1(a)中的 α区域绕光学系统Z轴旋转360°,形成的圆柱视场投影到二维平面上一个环形区域内,如图1(b)所示。像平面上的环形区域与物空间 α视场角相对应,环形区域内每个同心圆代表与光轴有一定夹角的光锥面上所有点的投影。因为在环带成像系统中,存在第二块反射镜,会遮挡中心视场的光线,形成一个中央视野盲区,即图1 中β区域。采用平面圆柱投影法的系统一般遵循等距物像投影关系,即y′=f′θ,获得的环带像可以很好地恢复成矩形全景图,且该全景图与扫描一周形成的矩形全景图保持一致,是一种理想的全景成像系统。

图1 平面圆柱投影原理示意图Fig.1 Schematic of principle of flat cylinder perspective
全景环带透镜的成像光路图如图2 所示。物平面一物点 P发出的光线依次经过折射面1、反射面2、反射面3 和折射面4 后在头部单元后方形成虚像 P′,该虚像再通过中继透镜组在像面上生成一个实像 P′′,被位于像面的CCD 接收。在该成像光路中,头部单元的作用主要是对光线进行转折,以获取较大视场。中继透镜组由多个透镜组成,承担将头部单元对景物所成的中间虚像进行二次成像,并将其转化为一个具有合适放大倍率、合适成像位置的实像的任务,同时辅助校正系统像差[14]。

图2 全景环带透镜成像光路图Fig.2 Imaging optical path of panoramic annular lens
2 全景环带监控镜头设计过程
2.1 技术指标分析
本文设计的全景环带镜头具备日夜成像功能,工作在可见光及近红外波段(840 nm~860 nm),侧向视场范围为40°~100°。可将其应用于零售店,银行等小范围(l≤ 20 m)场所内,能够分辨出100 mm大小(人的手部,需要3 个像素进行分辨)的物体,即系统的角分辨率需要满足:
式中:d表示像元尺寸;f′为光学系统焦距;y为目标物的大小;l为目标到成像系统的距离。根据公式(1)可知,为了得到较大的角分辨率,可以减小d或者增大f′,但长焦距全景环带系统结构复杂,设计难度较大。综合考虑,取d≤ 4 μm,焦距为-2.75 mm,F数为3.28,此时入瞳直径D=0.83 mm。光学系统衍射极限角分辨率公式为
1) 可见光条件下,取主波长λ=0.587 μm,则该系统 δθ为0.86 mrad;
2) 近红外光条件下,取主波长λ=0.85 μm,则该系统 δθ为1.24 mrad。
由此可知,即使考虑实际设计及加工因素的影响,镜头成品亦可满足1.67 mrad 角分辨率要求。
通常使用调制传递函数(MTF)评价镜头成像质量。已知光学系统垂直视场角范围为40°~100°,使用2.54 cm(1 英寸)的CCD 接收图像,其像元尺寸d≤ 4 μm,由此可确定系统传递函数的奈奎斯特频率为
为了获得较好的成像质量,要求全视场MTF曲线在125 lp/mm 处高于0.4。
全景环带光学系统可通过光阑像差提高像面照度的均匀性。为防止监控画面出现暗角,要求该光学系统的相对照度大于0.9。为充分利用像元,降低图像处理难度,要求畸变在2%之内。
综上所述,光学系统的各项指标如表1 所示。

表1 光学系统技术指标Table 1 Technical indices of optical system
2.2 设计过程
首先对可见光波段设计头部单元,中继透镜组采用具有一定焦距的薄透镜代替,图3 给出了头部单元的光学结构图。为抑制杂散光,提高成像质量、减小结构尺寸,将头部单元的最后一面设置为光阑[15]。像面采用曲面形式,使中继透镜组承担校正大部分场曲的作用。
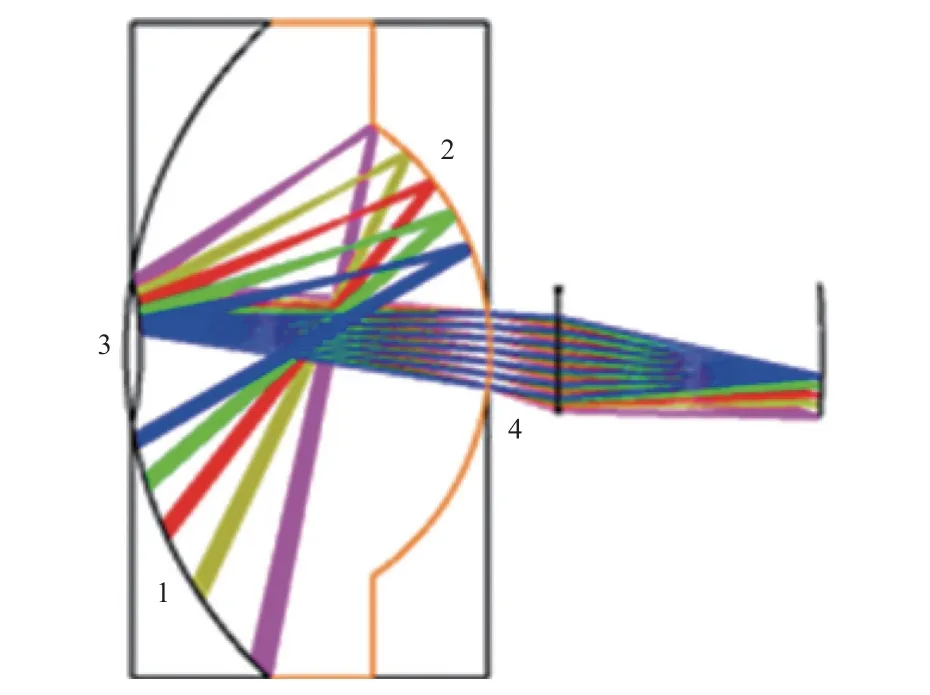
图3 头部单元光学结构Fig.3 Optical structure diagram of head unit
在进行仿真与优化过程中发现,第一面透镜曲率半径对畸变的影响最大,改变第一面透镜的曲率,将畸变控制在3%以内。第二面透镜的曲率半径较小,因其影响第一面透镜边缘光线的入射和第四面透镜光线的出射。为了便于加工,第四面透镜随第二面透镜曲率一起变化,可校正部分场曲和畸变。第三面透镜曲率半径对彗差和像散的影响较大,精确调整此镜面的曲率半径可大大减小彗差和像散。单独的头部单元无法校正轴向色差和垂轴色差,所以头部单元一般采用低色散的冕牌玻璃进行设计。
设计初期,头部单元均采取全球面面型,设计系统的MTF 曲线图如图4(a)所示。由图4(a)可以看出,各视场的曲线不够平滑,说明像面边缘与中心一致性差;子午和弧矢曲线分离,光学系统存在较大像散。为提高头部单元成像质量,减轻中继透镜组校正像差的压力,在头部单元设计中尝试引入非球面。因第二面透镜和第四面透镜具有相同的曲率,将其设为非球面,像差可以进行2 次校正。非球面头部单元MTF 曲线图如图4(b)所示。由图4(b)可以看出,全视场MTF 曲线在截止频率处大于0.3,曲线聚拢且较平滑,在此基础上添加中继透镜组完成全部设计。

图4 头部单元MTF 曲线图Fig.4 MTF curves of head unit
将图3 中的中继透镜组实体化,镜片表面均为球面,像面改为平面接收。因光学系统结构确定之后畸变难以校正,因此使用DISC 操作数对畸变进行严格控制。为消除色差,中继透镜组中引入多组双胶合透镜。为便于后续机械结构设计及传感器安装,需控制光学系统后截距。当光学系统在可见光下具有良好成像质量后,采用多重组态功能,添加近红外波段,在可见光和近红外光条件下继续优化,使日、夜最佳像面不断逼近,最终实现全天候离焦量小于0.002 mm(小于0.01 mm 视为日夜共焦)。在最后一片透镜后添加薄滤光片,不影响成像质量,设计完成的光学系统结构图如图5所示。
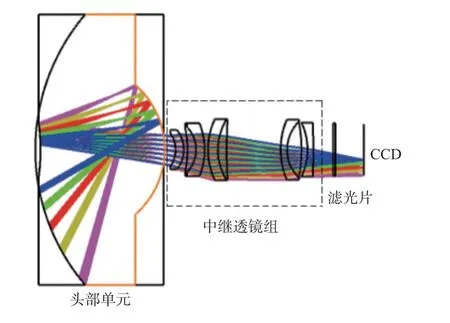
图5 光学系统结构图Fig.5 Structure diagram of optical system
3 设计结果分析
全天候全景监控摄像光学系统最终设计结果见图5 所示。图5 中第二面透镜和第四面透镜为偶次非球面透镜,考虑到加工和检测技术,全景环带透镜的设计不使用高的非球面系数。镜头的具体结构参数如表2 所示,表3 为非球面面型参数。该系统总长为60.13 mm,后工作距离为9 mm,后工作距离能够保证探测器安装。该系统除第二面和第三面为反射面外,其他面均为折射面,其中反射面镀反射膜,折射面镀减反膜。

表2 镜头结构参数Table 2 Parameters of lens configuration

表3 非球面面型参数Table 3 Aspheric surface parameters
系统在可见光和近红外光波段的MTF 曲线图如图6 所示。其中黑色曲线为衍射极限MTF 曲线,其他颜色曲线分别为各视场下子午和弧矢MTF曲线,在125 lp/mm 处MTF 值均大于0.4,接近衍射极限,说明系统具有较高的分辨率和较好的成像质量。

图6 系统MTF 曲线图Fig.6 MTF curves of system
设计的系统点列图如图7 所示。由图7 可以看出,在可见光和近红外光条件下,最大视场弥散斑均方根半径均小于一个像元尺寸。另外,图8 给出了该系统的场曲曲线和畸变曲线。在可见光和近红外光下系统最大畸变值分别为1.87%和1.83%,均小于2%,全视场范围内相对照度>0.9,照度分布相对均匀,设计结果满足各项指标要求。

图7 系统点列图Fig.7 Spot diagram of system
4 公差分析
完成理论的光学系统设计后,在投入生产加工之前,需要对镜片在加工组装过程中可能存在的公差进行模拟分析。结合国内外研究现状及应用需求,该光学系统公差分析项目和取值范围如表4所示。
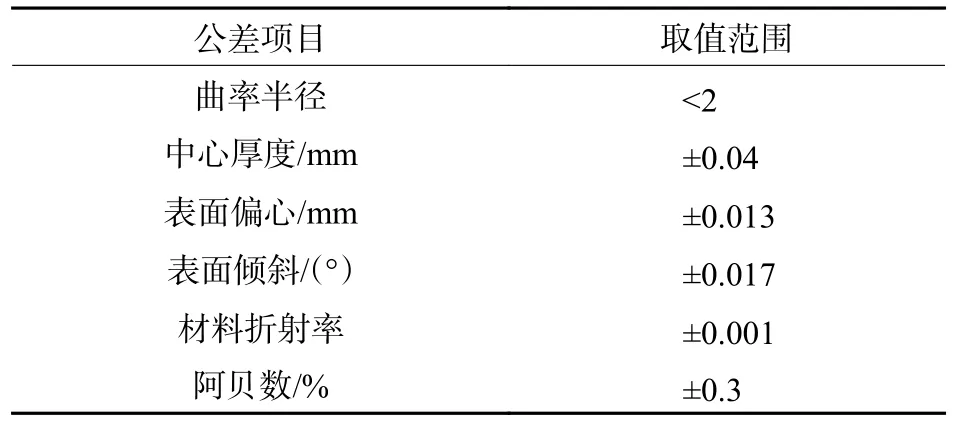
表4 公差分析项目和取值范围Table 4 Tolerance analysis items and value ranges
以125 lp/mm 处MTF 衍射平均值为评价标准,对设计的光学系统进行蒙特卡罗公差分析后发现,影响MTF 值最大的参数是第8 光学面的偏心公差,以及第7~8 光学面和第14~17 光学面的厚度公差,生产加工时需要对这几个公差严格控制。表5 为对像质影响较大的光学面控制后的公差分析结果。从表5 可以看出,90%成像区域的MTF 值大于0.323,公差范围合理,具有较高的可加工性。
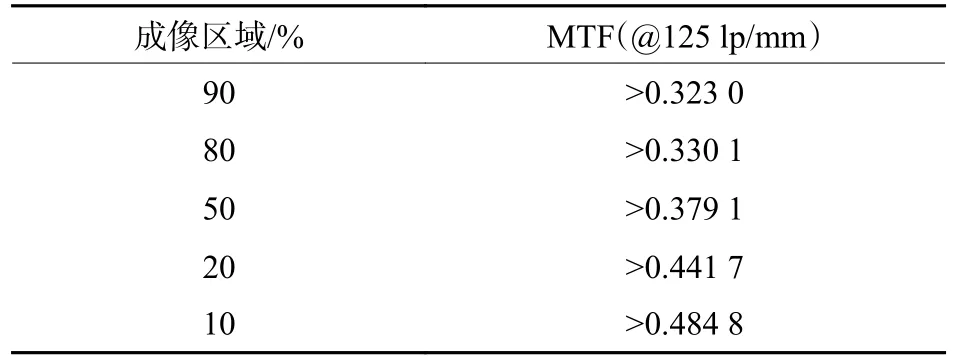
表5 蒙特卡罗分析结果Table 5 Monte Carlo analysis results
5 结论
基于平面圆柱投影法,设计了一款全天候全景监控摄像光学系统。首先在可见光条件下对该系统进行设计,在针对全景头部单元设计时发现,采用偶次非球面的头部单元相对于全球面头部单元具有更好的成像质量,可以减小中继透镜组校正像差的压力。可见光条件下具有良好成像质量后,利用多重结构优化方式,添加近红外波段,最终实现日夜离焦量小于0.002 mm,满足24 h 监控需求。设计结果表明,该系统具有结构紧凑、畸变小、像面照度分布均匀、昼夜清晰成像等特点,可满足电梯箱、银行、零售店等场所应用需求。最后经公差分析可知,该镜头满足实际生产加工要求,并给出了生产加工中需要着重把控的光学面。
猜你喜欢
中国光学(2021年6期)2021-11-25 07:48:32
工程力学(2021年6期)2021-07-06 07:01:40
生物学通报(2019年7期)2019-07-08 06:04:02
中国医疗设备(2019年1期)2019-01-15 12:10:54
天文爱好者(2016年7期)2016-12-20 09:30:16
航天制造技术(2016年6期)2016-05-09 08:32:43
传感技术学报(2016年1期)2016-03-22 02:26:59
激光与红外(2015年10期)2015-03-23 06:07:18
组合机床与自动化加工技术(2014年12期)2014-03-01 02:22:58
中国光学(2012年3期)2012-10-30 08:48:54