数字闭环光纤陀螺的无纹波最小拍控制
2023-06-05 09:22徐金涛田爱玲
应用光学 2023年3期
徐金涛,田爱玲
(1.西安工业大学 光电工程学院 陕西省薄膜技术与光学检测重点实验室,陕西 西安 71002;2.西安中科华芯测控有限公司,陕西 西安 710119)
引言
干涉式光纤陀螺仪(interferometric fiber-optic gyroscopes,IFOG)是一种基于Sagnac 效应的角速度传感器,具有全固态、抗冲击、成本低、体积小等优点,在航天、航空、航海、石油探井等领域得到了广泛的应用[1-2]。数字闭环IFOG 根据反馈信号进行相位调制,消除由转速引起的相移,改善了IFOG 的动态范围大和比例因子线性度,是目前中高精度IFOG 的主流方案[3-4]。在数字闭环光纤陀螺中需要根据本征频率进行控制,不同光纤陀螺本征频率存在差异,通常采用锁相环等技术产生本征频率[5]。然而,系统时钟会存在随机波动,锁相环产生的频率也存在起伏,这将导致控制系统输出中存在纹波干扰,严重影响数字闭环光纤陀螺的精度。
王夏宵等根据Faraday 效应对数字闭环IFOG的动态特性进行了测试,克服了角振动台测试的局限性[6-10]。王妍等提出了将正弦波信号叠加到反馈解调波中,实现在高带宽下IFOG 动态性能的测试[11-15]。赵政鑫等通过在Y 波导上叠加正弦电压来等效角振动,增大了IFOG 的带宽测试范围[16]。以上研究主要在数字闭环IFOG 的频率特性的测试上取得了很好的成果,但对数字闭环IFOG 控制系统缺乏较为深入的研究。
为了提高数字闭环IFOG 的可靠性和适应性,本文在四态方波调制解调原理的基础上,建立了数字闭环IFOG 理论模型,分析了数字闭环IFOG 的稳定工作条件和动态性能,指出了原有IFOG 数字闭环光纤陀螺控制系统的不足,并提出了无纹波最小拍的优化控制方案。通过实验对比了优化前后数字闭环光纤陀螺的性能,结果表明,方案优化后陀螺的零偏稳定性等性能指标得到了明显提升。
1 理论模型
数字闭环IFOG 结构如图1 所示,主要包括光源、耦合器、相位调制器(Y 波导)、光纤环、光电探测器、前置放大器、模/数转换器(ADC)、数字逻辑处理器、数/模转换器(DAC)和输出缓冲放大器。光源、耦合器、相位调制器和光纤环构成Sagnac 干涉仪。当光纤环旋转时,环路中相向传播的两束光波产生的相位差 φs与旋转速率Ω成正比,比例系数为

图1 数字闭环IFOG 结构框图Fig.1 Structure block diagram of digital closed-loop IFOG
式中:L为光纤长度;D为光纤环直径;λ为光波长;c为真空中的光速。
在数字闭环IFOG 中,光电探测器探测到的光强与相向行波相位差的函数关系为
式中:I0为光源光强;η为光电探测器响应度。为了提高检测灵敏度,通常采用方波调制使IFOG 工作在光强与相位差函数曲线的较大斜率处,并通过反馈阶梯波信号使数字闭环IFOG 总相位差为零,形成数字闭环光纤陀螺一次闭环。另外,由于相位调制器的电光系数依赖于温度,因此,需要通过第二闭环来稳定相位调制器的增益。对于方波调制,只能在阶梯波复位时才能检测相位调制器增益误差信号。然而,阶梯波复位频率取决于转速,从而导致方波调制的第二闭环不稳定,为了避免这一问题,工程实际中通常采用四态方波调制来提高第二闭环回路的控制效率,其原理如图2所示。
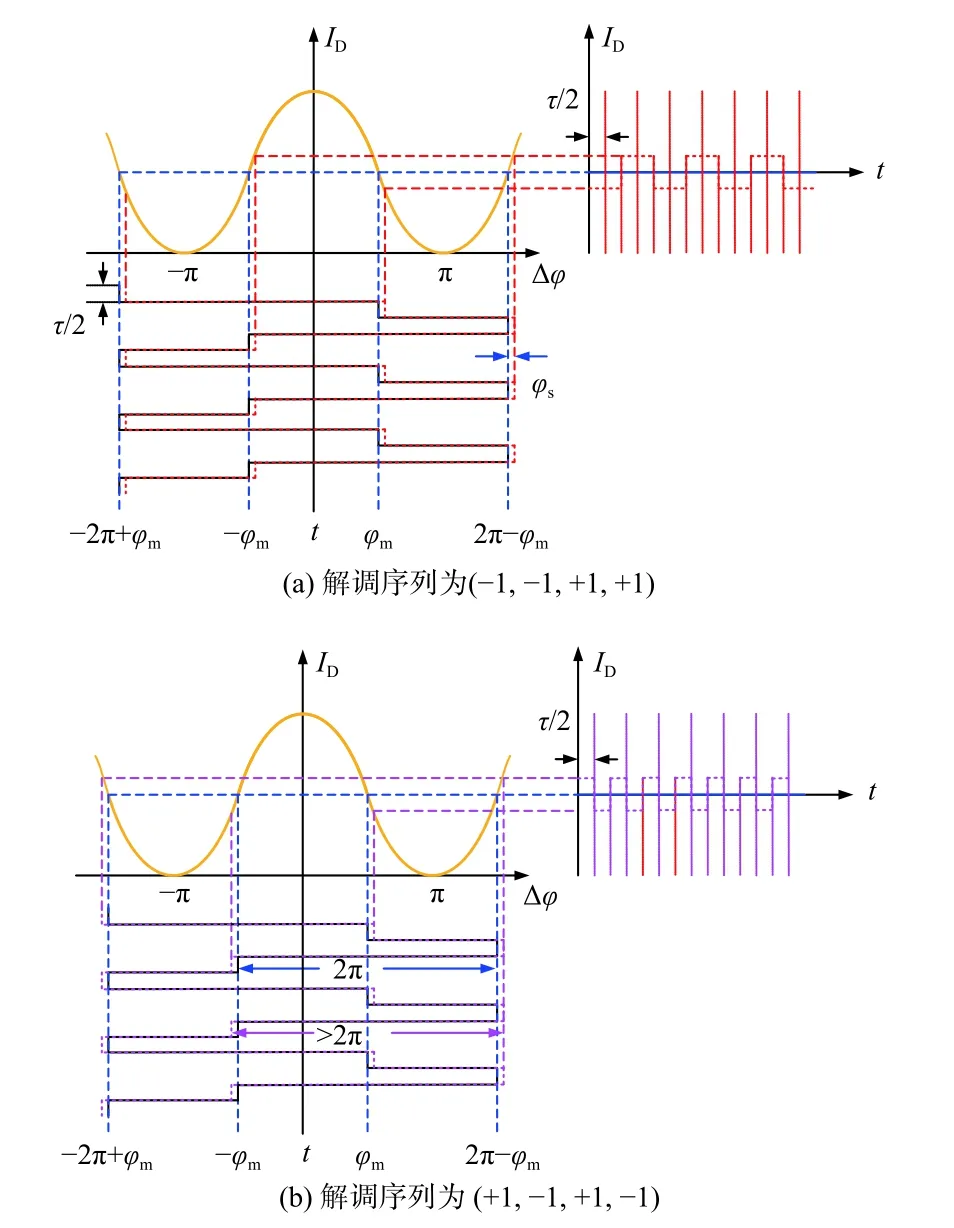
图2 四态方波调制原理Fig.2 Schematic of four-state square wave modulation
图2 中,四态方波调制序列为(-2π+φm,φm,2π-φm,-φm),状态持续时间为τ/2,τ为光纤环渡越时间,φm为调制深度。在四态方波调制下,对应的转速解调序列为(-1,-1,+1,+1),如图2(a)所示;对应的调制器增益误差的解调序列为(+1,-1,+1,-1),如图2(b)所示。因此,在本征频率下,可以同时获得转速误差信号和调制器增益误差信号,提高了第二闭环的控制效率。
在四态方波调制的数字闭环IFOG 中,Sagnac效应可以等效为比例环节,比例系数为Ks。闭环控制使光纤陀螺工作点稳定在光强相位曲线较大的斜率点上,因此,干涉效应可以等效为比例环节,比例系数K1=ηI0sin(φs)/2。光电探测器、前置放大器、A/D 转换器均可等效为比例环节,比例系数分别为K2、K3、K4;数字解调是在2τ的时间内对旋转误差进行采样,传递函数可以表示为K5z-1;采样误差经过控制器比例放大并累加,对应的传递函数为K6/(1-z-1);控制器输出信号再经过累加形成阶梯波信号,其传递函数为K7/(1-z-1);阶梯波信号经过D/A 转换及缓冲器放大,相应的传递函数可以表示为K8;在相位调制器中阶梯波信号被延迟的时间为τ,并与原有信号相加,其传递函数为K7/(1-z-1)。根据以上分析可得:四态方波调制下数字闭环IFOG 的控制系统框图如图3 所示。

图3 数字闭环IFOG 系统框图Fig.3 Block diagram of digital closed-loop IFOG system
令KF=K1K2K3K4K5K6为前向增益,K=K7K8为反馈增益,K=KFKB为开环增益。系统开环传递函数中包含1 个z=1 的极点,因此该控制系统为I 型系统。根据自动控制理论,IFOG 的闭环传递函数为
误差传递函数为
根据以上分析建立数字闭环IFOG 控制系统的理论模型,下面将在该理论模型的基础上对控制系统性能进行分析,并提出数字闭环IFOG 的优化控制方案。
2 性能分析与优化
2.1 控制系统性能分析
根据数字闭环IFOG 的传递函数,可得其特征方程为
令z=(w+1)/(w-1),可得:
根据劳思稳定判据,满足系统稳定的不等式组为
通过求解不等式组,可得数字闭环IFOG 控制系统的稳定性条件为
由于控制系统为I 型系统,在单位阶跃输入下,其位置误差为0。在单位斜坡输入下,根据终值定理,可知其稳态误差为
式(9)表明,当数字闭环IFOG 在角加速度输入下,其稳态误差不为零,该稳态误差与角加速度成正比,与开环增益成反比。当K=0.05、0.15、0.30、0.45 时,数字闭环IFOG 的幅频相频特性如图4 所示。

图4 数字闭环IFOG 的幅频相频特性Fig.4 Characteristics of amplitude frequency and phase frequency of digital closed-loop IFOG
图4 中,数字闭环IFOG 频率带宽随开环增益K的增大而增大,当开环增益大于0.2 时,在高频段,增益大于1。为了获得较大的带宽及稳定控制,0.2 开环增益为最佳开环增益。
2.2 闭环控制系统优化
IFOG 控制系统性能分析表明,其控制系统为I 型系统,在角加速度输入下存在稳态误差。在积分器和阶梯波的设计中引入的采样器增大了系统超调量,并降低了系统的稳定性。为了提高数字闭环光纤陀螺的稳定性,在积分控制及阶梯波生成过程中,从缓存区前级输出,可以消除两个采样器。根据二阶无纹波最小拍系统控制设计方法,对原有IFOG控制器进行修正,消除在斜坡输入下的静态误差,获得优化后的数字闭环IFOG 无纹波最小拍控制系统,如图5 所示。

图5 数字闭环IFOG 无纹波最小拍控制系统框图Fig.5 Block diagram of ripple-free minimum beat control for digital closed-loop IFOG
优化后的数字闭环IFOG 控制系统传递函数为
误差传递函数为
由于该控制系统为II 型系统,在单位阶跃及单位斜坡输入下,其误差均为0。
3 实验与结果分析
根据数字闭环IFOG 无纹波最小拍控制系统框图,可得控制器输入输出关系为
式中:x(k)为k时刻的误差量;y(k)为k时刻的输出量。以上分析表明,可以在FPGA 中通过寄存器将输出误差量和输出量分别延迟两个控制周期,用减法器获取误差量的变化和输出量的变化,并将其用于积分控制,从而在FPGA 中实现无纹波最小拍系统控制。
本文根据GJB2426A-2004 光纤陀螺仪测试方法,通过对比原有控制与无纹波最小拍控制在光纤陀螺零偏稳定性、角随机游走、标度因数非线性度等主要指标上的差异来评估无纹波最小拍控制方法的优劣。具体步骤如下,在常温下对70 型光纤陀螺分别采用原有控制方法和无纹波最小拍控制方法,进行1 h 的性能指标测试,实验过程中,光纤陀螺中光纤环长为800 m,光纤环平均直径为70 mm,光源为超辐射发光二极管,光波长为1 310 nm,ADC 位宽为12 bit,DAC 位宽为16 bit。测试结果如图6 所示。

图6 不同控制方法测试结果对比Fig.6 Comparison of test results of different control methods
测试结果表明,无纹波最小拍控制下光纤陀螺输出噪声明显降低,说明原有控制系统由于控制纹波的影响导致了较大的输出噪声。为了进一步评估无纹波最小拍控制的性能,对测试结果进行Allan 方差分析,结果如图7 所示。

图7 不同控制方法Allan 方差结果对比Fig.7 Comparison of Allan variance results of different control methods
分析结果表明,无纹波最小拍控制下光纤陀螺性能得到了明显提升,表1 给出了在不同温度下无纹波最小拍控制与原有控制方法在零偏稳定性、角随机游走、标度因数非线性度上的结果对比。

表1 原有控制与无纹波最小拍控制性能对比Table 1 Comparison of performances between original control and ripple-free minimum beat control
从表1 可以看出,相比于原有控制系统,无纹波最小拍控制系统增加了误差变化量和输出信号变化量的控制,因此能更好地跟踪载体角运动,减小跟踪误差。零偏稳定性提高约30%,角随机游走和标度因数非线性度均得到了提高。
4 结论
从理论上分析了四态方波调制下IFOG 数字闭环的理论模型,指出原有控制系统为I 型系统,在积分控制和阶梯波生成过程中产生的两级延迟降低了系统可靠性,并在角加速度输入下产生了与加速度大小成正比,与开环控制增益成反比的稳态误差。为了消除稳态误差的影响,设计了数字闭环光纤陀螺无纹波最小拍控制系统,从原理上消除了数字闭环IFOG 由采用频率引起的纹波误差。实验测试结果表明,无纹波最小拍控制有效提高了数字闭环IFOG 的性能。
猜你喜欢
光源与照明(2019年4期)2019-05-20
测控技术(2018年7期)2018-12-09
电镀与环保(2016年3期)2017-01-20
电镀与环保(2016年3期)2017-01-20
光学精密工程(2016年4期)2016-11-07
电子器件(2015年5期)2015-12-29
电源技术(2015年1期)2015-08-22
深圳大学学报(理工版)(2015年5期)2015-02-28
电测与仪表(2014年11期)2014-04-04
实验技术与管理(2014年9期)2014-03-11