单电机驱动广义椭偏仪变角结构设计与实现
2023-06-05 09:21:58刘政杰陈媛媛刘燕霖谢大洋
应用光学 2023年3期
刘政杰,薛 鹏,陈媛媛,刘燕霖,谢大洋,张 瑞
(1.中北大学 信息与通信工程学院,山西 太原 030051;2.中北大学 电气与控制工程学院,山西 太原 030051;3.中北大学 前沿交叉科学研究院,山西 太原 030051;4.山西省光电信息与仪器工程技术研究中心,山西 太原 030051)
引言
在光伏太阳能、半导体、通信光电子、IC 集成电路等领域,通常采用光学方法进行纳米薄膜厚度及光学常数的精确测量。常见的方法有:红外光谱分析膜厚法、射线测厚法、光干涉法、激光测厚法、椭圆偏振测厚法等[1-2]。其中,椭圆偏振测厚法由于同时利用了反射光束的幅值衰减和相位改变,可以获得薄膜样品更多的光学参数和信息,且精度更高、速度更快、与样品非接触[3-4],可测样品更为广泛,因此在近几年得到快速发展和应用。
自1901 年德国Drude 教授推导了椭偏方程并首次提出椭偏测量装置至今,椭偏仪和相应的椭偏测量技术已有100 多年的历史[5]。目前,椭偏测量主要有穆勒矩阵部分元素椭偏测量和全穆勒矩阵椭偏测量两种方式。其中,穆勒矩阵部分元素椭偏测量系统仅能测量部分穆勒矩阵,不能获取完整的样品信息,但可用于非退偏或者各向同性样品的测量。测量系统主要有三类:1) 旋转单个起偏器或检偏器型椭偏测量方法[6];2) 旋转单个补偿器型椭偏测量方法[7];3) 同时旋转起偏器和检偏器型椭偏测量方法[8]。全穆勒矩阵椭偏测量系统能测量全部的穆勒矩阵,适用于各种样品测量[9],测量系统主要包括利用相位调制器的相位调制器型椭偏仪[10]和双旋转补偿器型椭偏仪(广义椭偏仪)。在全穆勒矩阵椭偏测量系统中,由于广义椭偏仪器标定简单,系统测量精度高,补偿器相位延迟稳定,此类椭偏系统具有更广阔的应用前景,是未来发展的主流趋势[11]。
目前,广义椭偏仪的变角方式主要分为卧式和立式。德国欧库睿因公司(Accurion Gmb H)提出一种由2 个电机分别带动起偏臂和检偏臂旋转的平面双摇杆机构式的立式变角结构,该机构原理简单,调试方便,变角精度也较高,但是杆件较多,整体比较复杂,对零件的加工、装配精度要求较高,而且需要2 个电机进行角度调整,控制精度要求高。刘世元、雷家宝等人在欧库睿因公司的基础上提出一种由单电机驱动丝杠滑台,并通过支杆连接同时带动双臂的立式变角结构[12],相对减少了支杆连接的复杂度,但对电机和装配精度要求较高。J.A.Woomllam 公司的VASE 型可变角光谱椭偏仪采用了一种双电机独立驱动检偏臂和样品载物台卧式结构[13],光路不宜对准,且此结构样品载物台需采用真空吸附的方式,较为复杂,对待测样品的局限性较大。
本文在现有广义椭偏仪变角结构的基础上,提出一种基于单电机驱动的椭偏仪变角结构。该结构主要由起偏臂、检偏臂、样品载物台、同步齿轮、步进电机旋转位移台构成,通过一个电机的运动带动同步齿轮,由同步齿轮带动样品载物台和检偏臂进行1∶2 的同步运动,完成椭偏仪的变角。其整体结构简单,极大地优化了椭偏仪变角的复杂度,且解决了卧式结构变角后无法自动对准光路的难题。
1 广义椭偏仪测量原理
广义椭偏仪测量原理如图1 所示,主要由起偏臂、样品台和检偏臂构成。起偏臂主要器件包括光源、起偏器A、相位补偿器C1;检偏臂主要器件包括检偏器P、相位补偿器C2和探测器。该系统可同时实现透射式和反射式测量。

图1 广义椭偏仪测量原理图Fig.1 Schematic diagram of generalized ellipsometer
光源发出的光经过起偏臂上起偏器P和旋转补偿器C1调制后,产生特殊的椭圆偏振光照射至待测样品表面,经样品反射(或透射)后的偏振光状态根据样品的性质发生变化,然后反射光经过检偏臂的旋转补偿器C2和检偏器A解调为线偏光后被探测器接收,最后通过分析整个过程中光的偏振状态变化,可以得到待测样品光学性质和样品结构等相关信息[14]。
若使用斯托克斯向量、穆勒矩阵分别表述偏振光束、光学元件,则经过相位补偿器C2和检偏器A解调后的斯托克斯向量Sout=(I,Q,U,V)T可表征为[15]
式中:MS为待测样品的穆勒矩阵;MC1(δ1)、MC2(δ2)、MA和MP分别是起偏臂相位补偿器C1、检偏臂相位补偿器C2、检偏器A和起偏器P的穆勒矩阵;δ1和δ2是旋转补偿器C1和C2的相位延迟;Sin为光线入射至起偏器的斯托克斯向量。
式中:角度θ为P、A、C1、C2所对应的的光轴方位角。整理上述矩阵表达式,可得探测器处光强表达式[16]:
其中,
式中:cj=cos2(δC j/2);sj=sin2(δC j/2);mjk(j=1,···,4;k=1,···,4)为样品的穆勒矩阵元素。取2 个旋转补偿器的转速比为m1:m2=5:3,对上述矩阵表达式进行傅里叶分析,可以得到如下表达式[17]:
联立方程(3)和方程(4),并通过锁相不同2nω系统获得样品穆勒矩阵MS中各元素mij。
2 单电机驱动椭偏仪变角系统结构设计
2.1 系统整体结构分析
本文提出并设计了一种结构简单、易于实现、误差小的全穆勒矩阵椭偏仪的单电机驱动椭偏仪变角系统,如图2 所示。椭偏仪整体还是采用卧式结构,固定起偏臂,由步进电机旋转位移台带动同步齿轮,并利用同步齿轮带动样品载物台和检偏臂进行1∶2 同步运动,从而实现椭偏仪的变角。样品载物台由XY二维旋转位移台和样品固定挡板组成,XY二维旋转位移台可以对椭偏光路进行微调,以确保入射光经起偏器、补偿器照射至样品表面,经样品反射后经补偿器、检偏器照射至探测器中心。样品固定挡板通过磁铁夹持的方式对样品进行固定,可以去除繁琐的真空吸附装置,并减少可测样品形状的局限性。
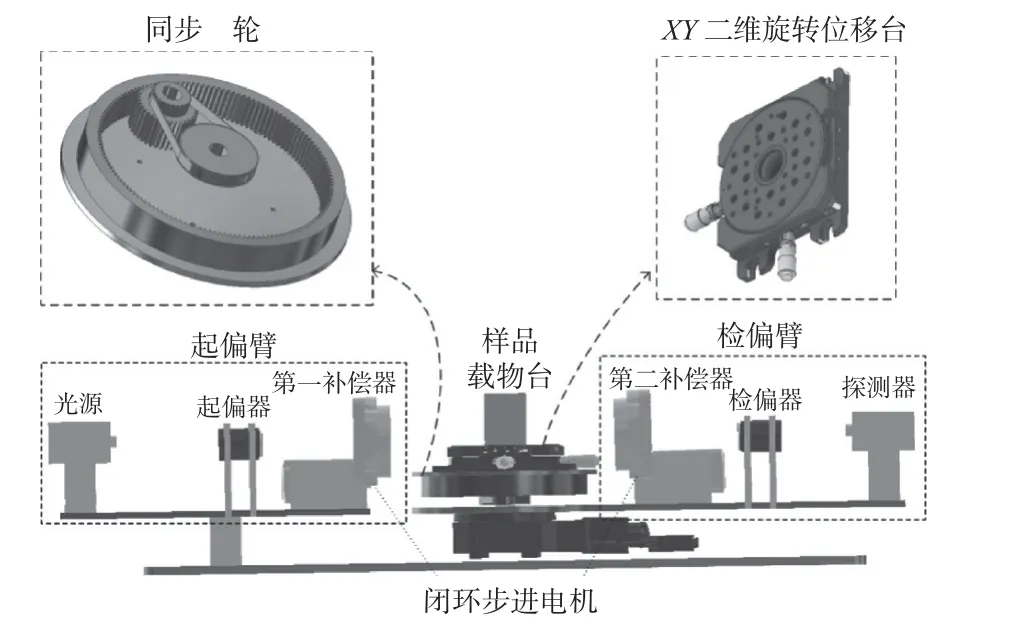
图2 单电机驱动椭偏仪变角系统结构示意图Fig.2 Structure diagram of variable angle mechanism of ellipsometer driven by single motor
为保证椭偏仪变角系统每次变角后光路准直,在起偏器固定条件下,变角过程中样品载物台与检偏臂应保持1∶2 的转速比进行同步旋转。因此本文设计了一种同步齿轮,如图3 所示。主要包括一个1∶2 传送比的皮带传送轮和一个1∶4 传动比的主从传动齿轮,通过齿轮传动在单电机条件下完成载物台与检偏臂之间1∶2 同步转动。
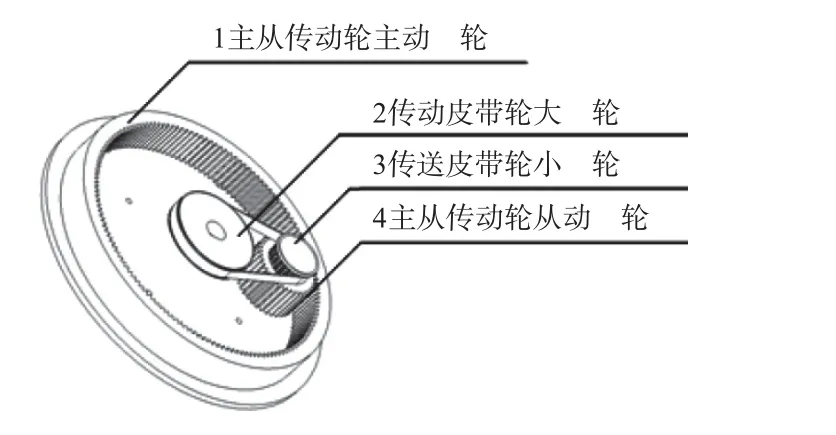
图3 同步齿轮结构图Fig.3 Structure diagram of synchronous gear
由于样品台和检偏臂同步旋转需要同轴旋转,因此本文采用一个主从同步齿轮和一个传送皮带轮相结合的方式来实现。其中所有齿轮齿宽相同,主动齿轮与从动齿轮传动比为1∶4,传送皮带轮大齿轮与小齿轮传动比为2∶1。皮带轮的小齿轮与主从同步齿轮的从动齿轮同轴同步转动,皮带轮大齿轮与主从同步齿轮的主动齿轮同轴,此时主动齿轮与传动皮带轮的大齿轮传动比为1∶2。
2.2 变角准直光路分析及仿真验证分析
变角准直光路原理图如图4 所示。图4 中起始光路法线为N、起偏臂与法线夹角为β,待测样品S旋转角度为ε,检偏臂旋转角度θ后光路法线为N',起偏臂与旋转后法线N'夹角为α。为保证光路正确,待测样品S应垂直于法线方向放置,故待测样品S旋转角度等于法线旋转角度,起始起偏臂与检偏臂夹角为2β。旋转后起偏臂与法线的夹角为
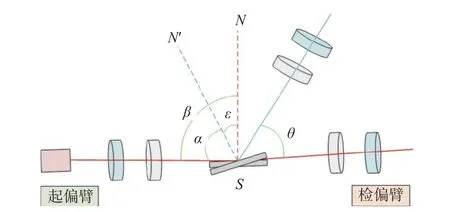
图4 变角准直光路原理图Fig.4 Schematic of variable angle collimation optical path
法线旋转角度为
运用Inventor 软件对单电机驱动椭偏仪变角结构1∶2 同步控制进行仿真验证[18-19]。图5(a)为单电机驱动椭偏仪初始位置(直通式空气测量光路);分别设置旋转位移台转速为4°/s、6°/s、9°/s,旋转10 s 后分别得到图5(b)所示70°测量光路;图5(c)为60°测量光路;图5(d)为45°测量光路。从图5 可以看出,旋转后的光路中,光线依然可以经过起偏器、第一相位补偿器调制后照射至样品表面,并经样品反射后经第二补偿器、检偏器解调后准确入射至探测器中心。由仿真结果可知,设计的椭偏仪变角系统可以完成椭偏仪自动变角,且在样品载物台和检偏臂保持1∶2 同步运动过程中依然可以保证光路准直。单电机驱动椭偏仪变角仿真运动曲线如图6 所示。其中图6(b)、6(c)、6(d)分别对应图5(b)、5(c)、5(d)时的运动曲线,图6(a)为45°测量光路下旋转至初始位置时对应的运动曲线。从图6 可以看出,运动过程中样品载物台和检偏臂的速度和位置一直保持在1∶2 的条件下,满足了变角需求。
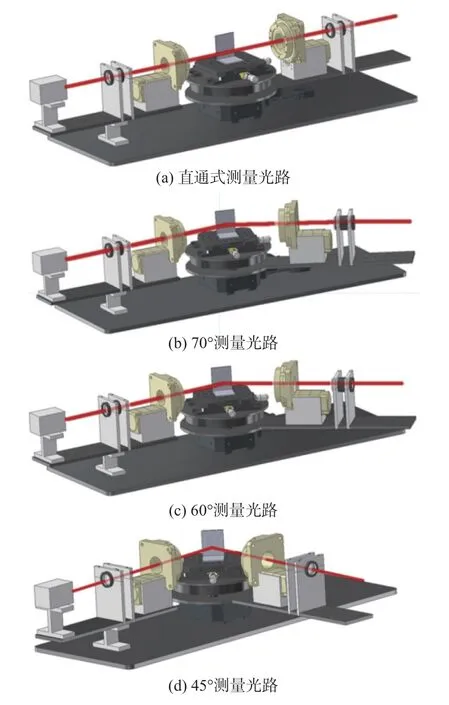
图5 单电机驱动椭偏仪变角仿真位置图Fig.5 Simulation position diagram of variable angle of ellipsometer driven by single motor
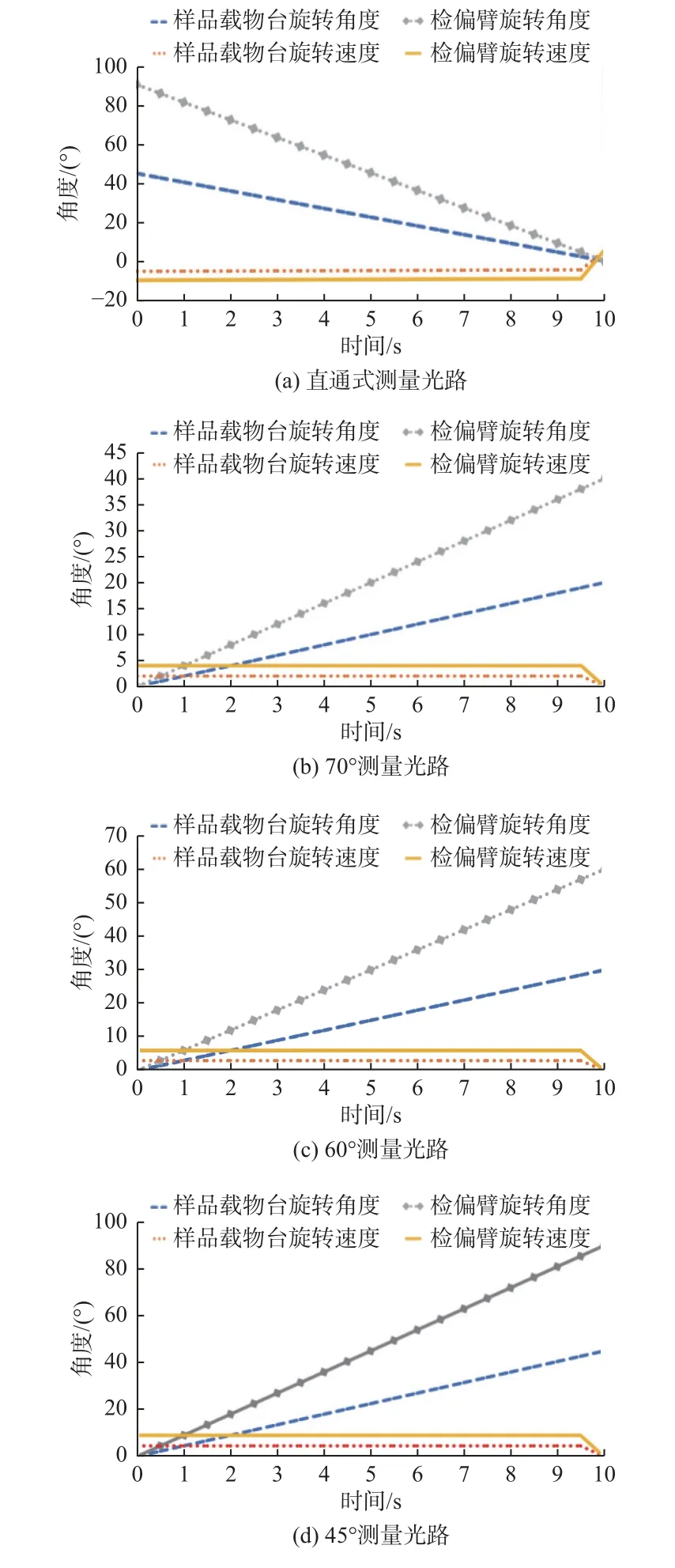
图6 单电机驱动椭偏仪变角仿真运动曲线Fig.6 Simulation motion curves of variable angle of ellipsometer driven by single motor
2.3 结果与讨论
根据搭建的单电机驱动椭偏系统对空气样本进行初步测试(选用波长635 nm 激光器),一个光学周期内测量得到的光强随时间的变化规律如图7 所示。从图7 可以看出,在接近0.4 s 和1.1 s附近产生消光,此时起偏臂的第一补偿器和检偏臂的第二补偿器的快轴方向相互垂直;在0.8 s 附近光强达到最大值,此时起偏臂的第一补偿器和检偏臂的第二补偿器的快轴方向相互平行。

图7 单电机驱动椭偏仪空气样本测量光强图Fig.7 Light intensity of air samples measured by ellipsometer driven by single motor
利用图7 所示数据,联立公式(1)~公式(4),计算得到空气样本的穆勒矩阵为
对比公式(8)与公式(9)可以看出,计算得到的MAir中最大穆勒矩阵元素误差为0.017,平均穆勒矩阵元素误差为0.004 5,与理论M′Air穆勒矩阵基本一致,进一步验证了本系统的可行性。
3 结论
本文首先介绍了椭偏仪的基本原理,并通过对椭偏仪目前现状的分析和研究,提出了一种单电机驱动广义椭偏仪变角系统结构。通过单电机驱动的旋转位移台驱动同步齿轮,由同步齿轮带动载物台和检偏臂进行1∶2 同步旋转,解决了目前椭偏仪多角度测量遇到的难题。通过对齿轮传动和皮带轮传动理论进行分析,解决了单电机无法同时驱动样品载物台和检偏臂进行同步旋转的问题。最后,对单电机驱动广义椭偏仪系统的运动进行仿真,并在透射条件下对空气进行测量,仿真和测量结果验证了单电机驱动广义椭偏仪系统的可行性。相比于传统的采用双电机分别驱动样品载物台和检偏臂的卧式结构椭偏仪变角系统,本文提出的方法省去了椭偏仪变角后光路难以对准的问题,极大地简化了椭偏仪系统的设计难度和操作难度。
猜你喜欢
内燃机工程(2021年6期)2021-12-10 08:07:46
湖南电力(2021年4期)2021-11-05 06:44:50
防爆电机(2021年3期)2021-07-21 08:13:00
防爆电机(2021年1期)2021-03-29 03:02:52
电机与控制应用(2021年12期)2021-02-28 07:55:22
少儿科学周刊·少年版(2020年9期)2020-03-04 11:38:12
少儿科学周刊·少年版(2020年9期)2020-03-04 11:38:12
制造技术与机床(2017年3期)2017-06-23 08:11:52
电子制作(2017年2期)2017-05-17 03:55:29
能源(2016年2期)2016-12-01 05:10:31