
秸秆收集机捡拾器仿真优化设计*
2023-06-05 01:31杨杰张征古冬冬王一言关阳仵峰
中国农机化学报 2023年5期
杨杰,张征,古冬冬,王一言,关阳,仵峰
(1. 华北水利水电大学机械学院,郑州市,450046;2. 华北水利水电大学水利学院,郑州市,450046)
0 引言
玉米是我国主要粮食作物,2022年我国玉米种植面积为4.02×107hm2,产量达2.59×108t,玉米收获后会产生大量的秸秆剩余,玉米秸秆有多种利用方式,其自身富含营养,可作为畜牧业的饲料来源,可以借助致密成型技术将其压缩成块状作为取暖材料或进行生物质发电[1]。但目前玉米秸秆利用率总量≤30%,剩余大量秸秆只能弃之田间地头被焚烧或自行腐烂,造成资源的巨大浪费,究其原因是玉米秸秆产量庞大,没有较好的设备能够将其系统的回收并运输。
秸秆收集机作为近些年收集回收农作物秸秆的重要机械[2],其关键部件捡拾器的工作性能直接影响着秸秆的利用效率,而捡拾刀具种类选择和在刀辊上的排布方式对秸秆收集效率有重要影响,祝英豪等[3]通过土槽试验对秸秆收集机刀具外形参数进行优化,在不降低秸秆埋覆效果的情况下功耗降低10.05%;刘鹏等[4]通过对比捡拾器不同转速情况下运动过程和受力变化规律,发现在碎秆破碎长度合格时,增大粉碎刀轴转速不利于抛撒均匀度提升,且作业功耗上升较大。因此研究优化秸秆收集机捡拾器的结构与运动参数非常关键。
本研究在4JQH-120秸秆收集机的基础上,设计了3种适用于该机型的捡拾器,分别对其进行模态分析、离散元-多体动力学仿真,对比分析得到收集质量更优的捡拾器刀具类型及排布方式。
1 整机结构及工作原理
1.1 整机结构
如图1所示,秸秆收集机主要由破传动装置、悬挂装置、捡拾装置、输送装置和风机收集装置等组成。
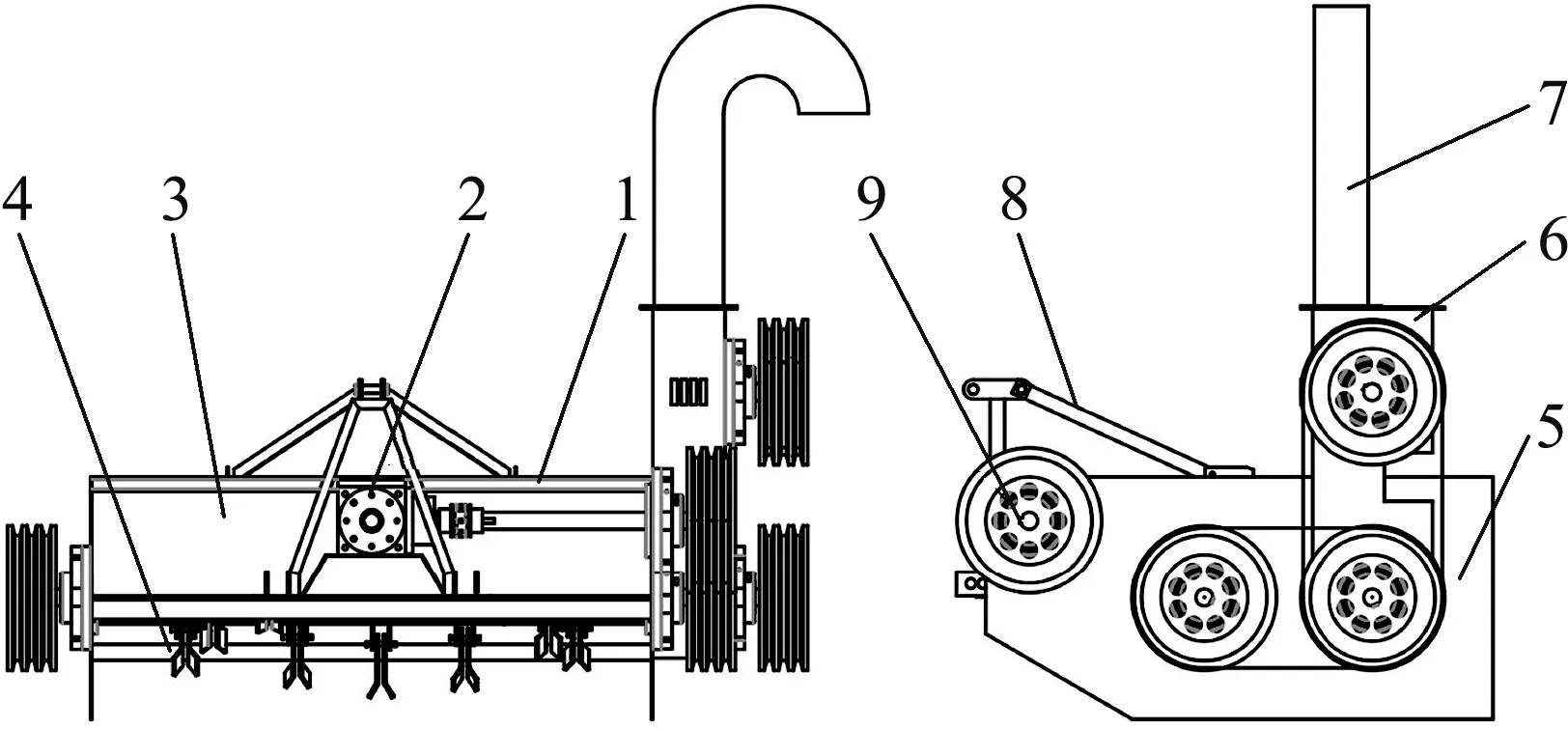
图1 秸秆收集机
1.2 工作原理与主要技术参数
秸秆收集机通过三角悬挂挂靠在拖拉机后方,依靠拖拉机后输出轴提供动力。作业时,平铺在田间的玉米秸秆经捡拾器捡拾并破碎抛送至后方输送搅龙,经输送搅龙旋转横向运输将秸秆物料输送至左侧风机处,然后秸秆物料经风机鼓风作用对其进行再次破碎并通过导流道将破碎后的秸秆输出。一般在出料口有农用三轮车或其他装货车辆收集破碎后的玉米秸秆。该秸秆收集机的主要技术参数如表1所示。

表1 玉米秸秆收集机的主要参数Tab. 1 Main parameters of corn stover collector
2 捡拾器设计
2.1 捡拾刀具选择
目前,市面上常见玉米秸秆捡拾刀主要有锤爪式、“Y”型刀和直型刀三种[5],如图2所示。其中锤爪式捡拾刀,处于高速旋转时的锤爪扫过的横截面积大,捡拾效果良好,但占用刀辊表面积大,动力消耗大,且对秸秆破碎效果较差;直型捡拾刀,高速旋转时受风阻横截面积较锤爪大大缩小,动力消耗小,秸秆粉碎效果好,但容易损坏;“Y”型捡拾刀,是在直型刀基础上对其进行改进,在直型刀原有优点基础上,捡拾效果方面也有所提升。

(a) 锤爪
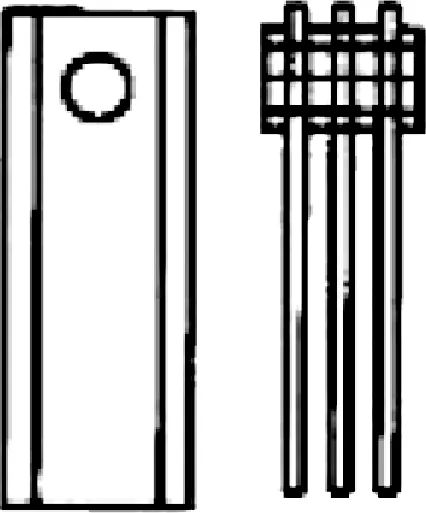
(b) 直型刀
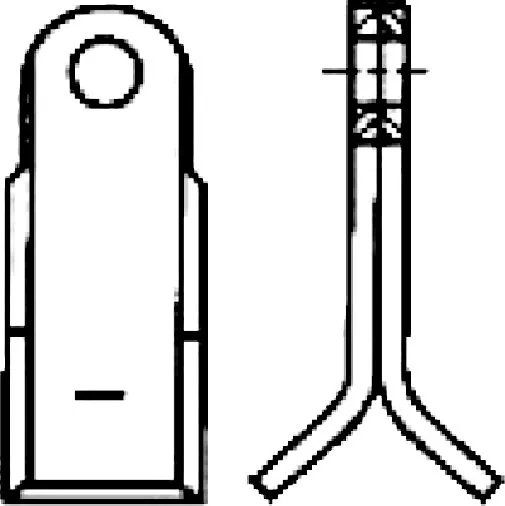
(c) “Y”型刀
s
2.2 捡拾刀具布置
本文在前人多次试验的基础上,综合考虑决定采用以下排布方式进行试验分析。全为“Y”型刀的双螺旋排布,以下简称Y捡拾器;刀具为锤爪和“Y”形刀混装的双螺旋排布,以下简称YC捡拾器;刀具为锤爪和“Y”形刀对称混装的螺旋排布,以下简称DC捡拾器。各捡拾器的刀具排布展开图如图3所示。

(a) Y捡拾器

(b) YC捡拾器

(c) DC捡拾器
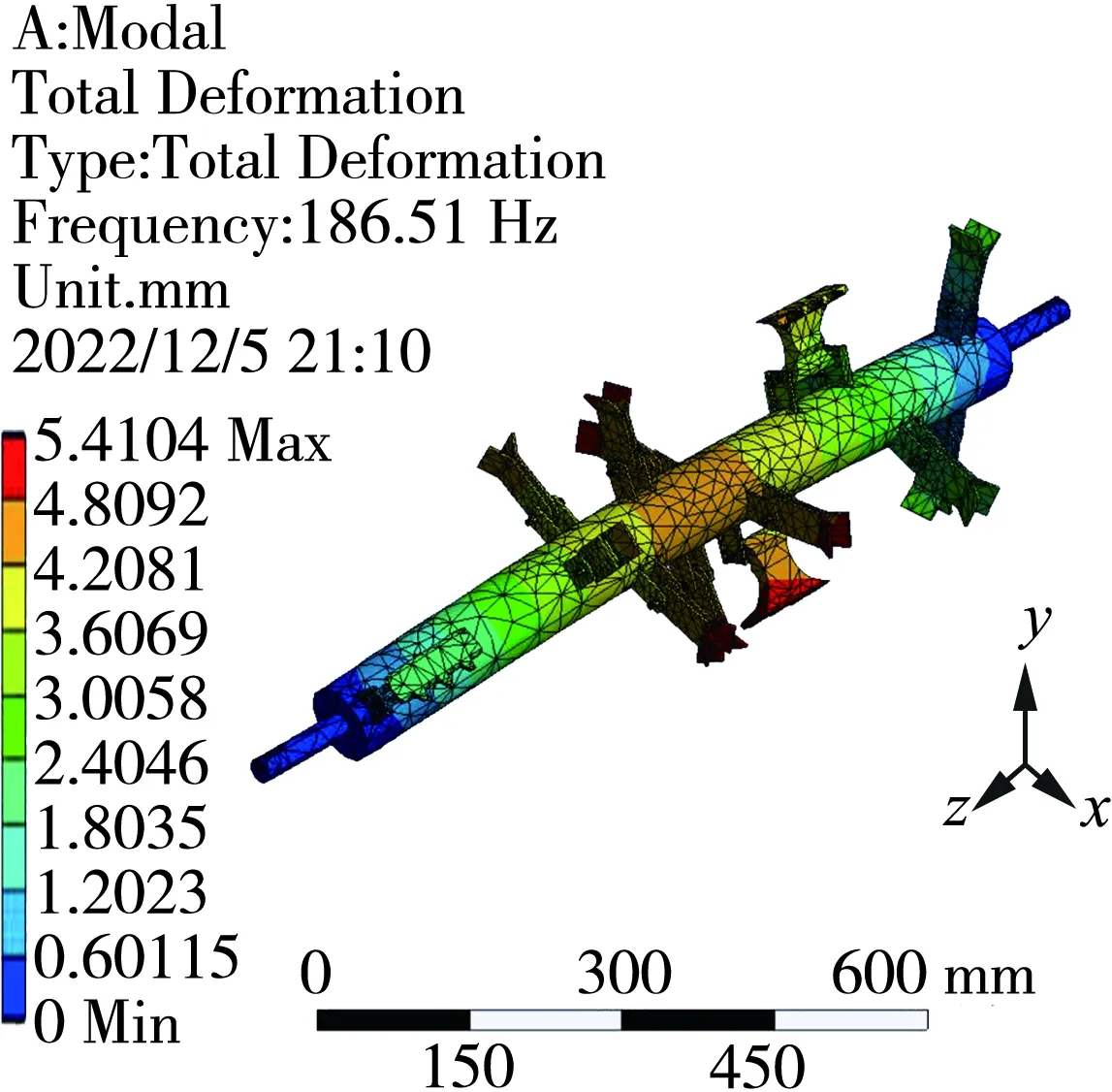
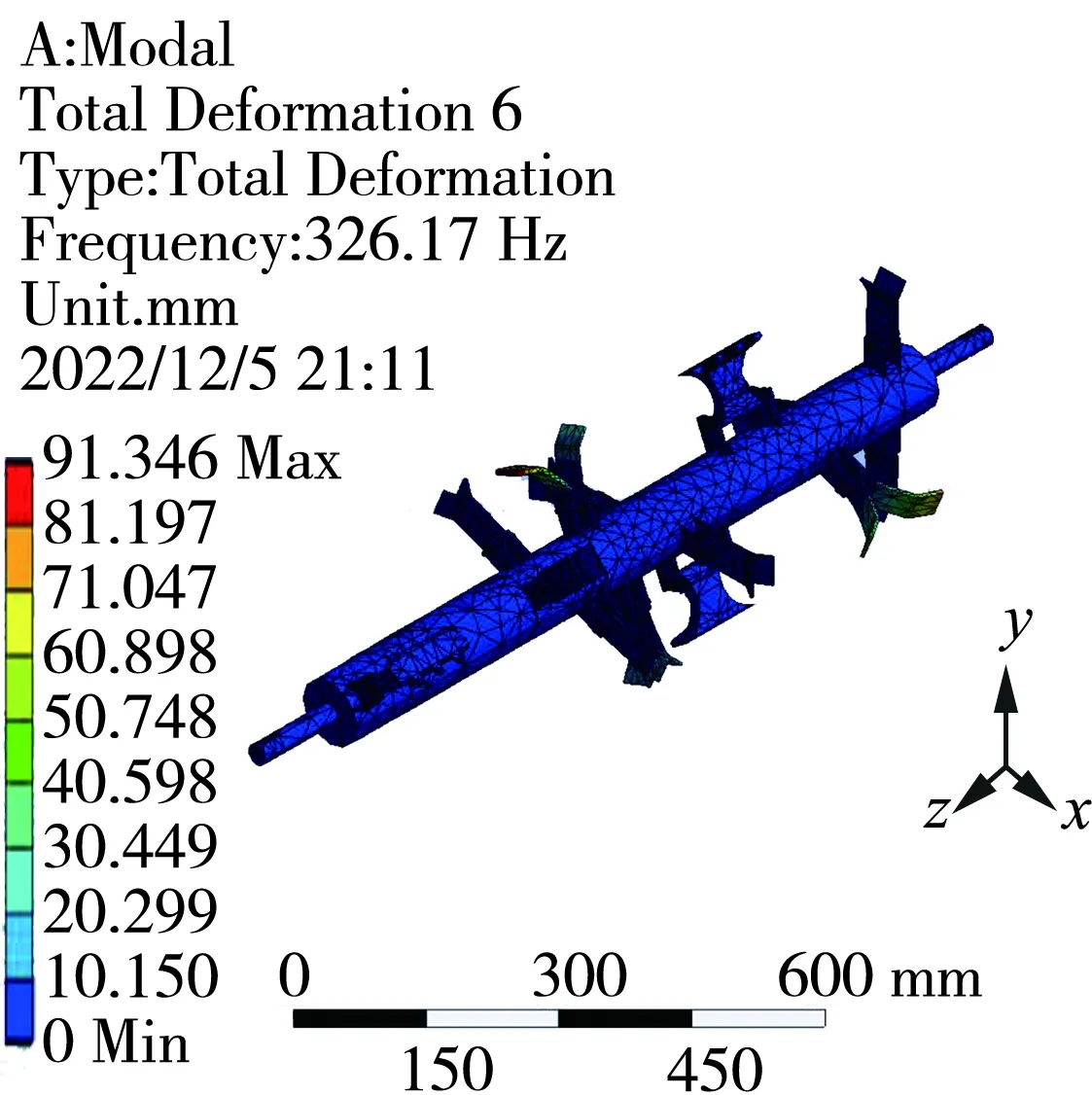
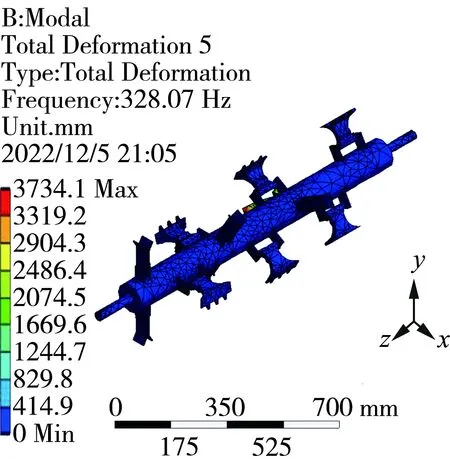
2.3 捡拾器模态分析
秸秆收集机在工作过程中,捡拾器高速转动会导致机具发生震动[6],为保证机具的稳定运行,基于ANSYS对各捡拾器进行模态分析,分析刀辊的模态属性与震动频率的关系。
模态分析设置取1~10阶,提取前6阶固有频率和振型进行分析[7],固有频率结果如表2所示,振型结果如图4~图6所示。3种捡拾器均在前2阶模态振型中,捡拾器弯曲变形较大,该型号还田机捡拾器的试验转速为1 900~2 300 r/min,得到其对应频率为31.67~38.33 Hz,与最低阶数的固有频率(186.09 Hz)相比相差甚远,不会导致共振的产生。

表2 三种捡拾器前6阶模态的固有频率Tab. 2 Natural frequencies of the first 6 modes of the three pickers

(a) 1阶阵型

(b) 2阶阵型
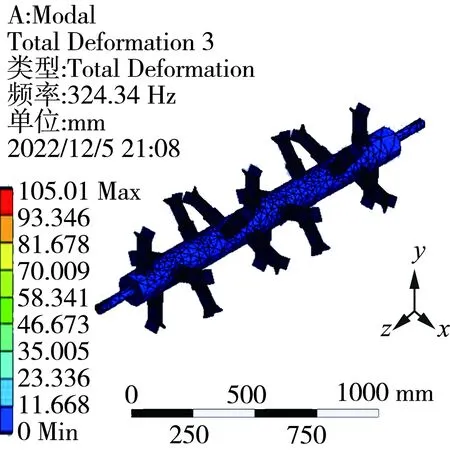
(c) 3阶阵型

(d) 4阶阵型

(e) 5阶阵型

(f) 6阶阵型
(a) 1阶阵型

(b) 2阶阵型

(c) 3阶阵型

(d) 4阶阵型

(e) 5阶阵型
(f) 6阶阵型

(a) 1阶阵型

(b) 2阶阵型

(c) 3阶阵型

(d) 4阶阵型
(e) 5阶阵型

(f) 6阶阵型
3 捡拾器刀具EDEM-RecurDyn耦合仿真分析
RecurDyn具有丰富的约束类型和力的施加形式,非常适合于求解大规模的多体系统动力学问题[8]。EDEM可用于工业生产中的颗粒处理及其制造设备的生产过程的仿真和分析,可利用EDEM轻松快速地创建颗粒实体的参数化模型,但软件自身所能实现运动形式较为简单[9]。在进行运动形式复杂模型仿真时,通常借助Adams、RecurDyn等多体动力学软件辅助分析[10]。
根据捡拾器种类、行驶速度和捡拾器转速设计正交表如表3所示。

表3 捡拾装置仿真试验正交设计Tab. 3 Orthogonal design of picking device simulation test
3.1 捡拾装置多体动力学建模
利用SolidWorks分别装配搭载3种捡拾器的捡拾装置三维模型,主要包括破碎腔和捡拾器,如图7所示。将三维模型另存为“.step”格式导入RecurDyn中,对其添加相关约束、驱动等如表4所示。

表4 RecurDyn参数设置Tab. 4 Parameter setting in RecurDyn

图7 捡拾装置三维模型
在添加完所有运动副之后,对“破碎腔-大地”移动副添加平移驱动,对“刀辊—破碎腔”旋转副添加旋转驱动,然后对捡拾刀和刀辊之间添加接触力。最后将所有零部件添加成为wall并导出[11]。
3.2 EDEM参数设置
玉米收获机切割后的玉米秸秆长度在0~80 mm之间不等,主要集中在45~60 mm,见表5[12]。
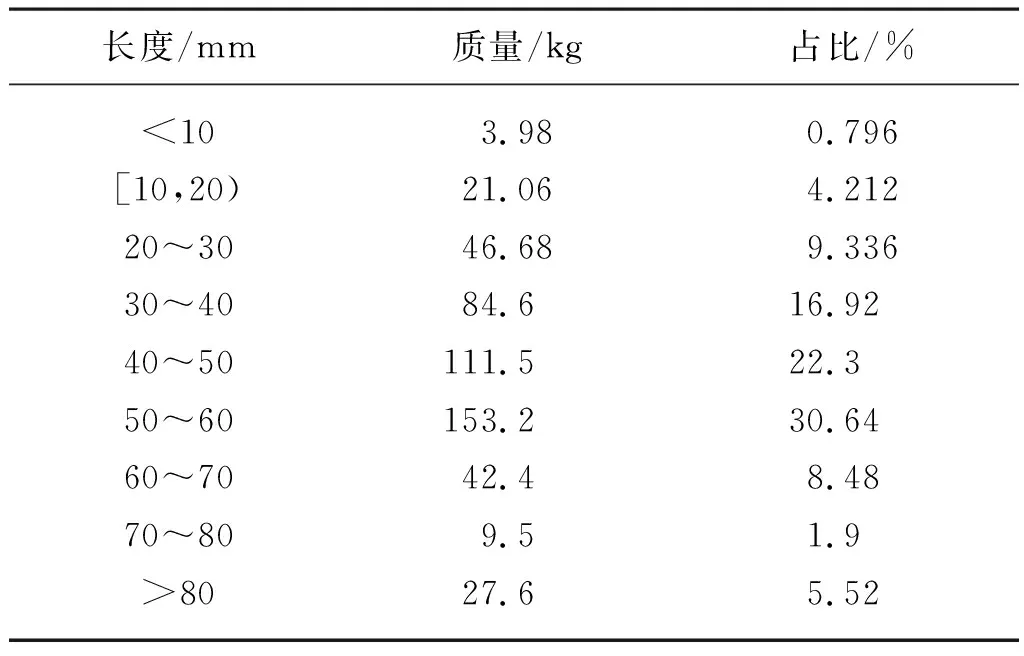
表5 玉米收获机切割后的玉米秸秆长度分布Tab. 5 Corn stover length distribution after cutting by corn harvester
首先设置秸秆物料和捡拾装置模型材料属性,主要包括材料泊松比、密度和弹性模量,如表6所示,各材料间接触参数如表7所示[13]。

表6 材料属性设置Tab. 6 Material property settings

表7 材料间接触参数Tab. 7 Material-to-material contact parameters
采用SolidWorks建立秸秆截面图形,利用SolidWorks宏命令提取对应坐标参数,将坐标导入EDEM,采用mate-particle功能将玉米秸秆表皮和髓芯的填充颗粒绑定在一起,为简化仿真模型,秸秆长度设36 mm、46 mm、56 mm三种长度段,分别占20%、35%、45%,其中36 mm长度秸秆由70个半径为1 mm 的小球和418个半径为2 mm的小球填充而成,46 mm长度秸秆由91个半径为1 mm的小球和528个半径为2 mm的小球填充而成,56 mm长度秸秆由112个半径为1 mm 的小球和638个半径为2 mm的小球填充而成,生成BPM模型,各小球通过粘结键形成一个整体,如图8所示[14]。

(a) 36 mm秸秆

(b) 46 mm秸秆

(c) 56 mm秸秆
在生成各个长度段秸秆颗粒模型后,在physics-particle to particle中选择bonding V2粘结模型,分别设置表皮—表皮、表皮—髓芯、髓芯—髓芯之间粘结参数,各粘结参数如表8所示[15]。

表8 颗粒粘结参数Tab. 8 Particle bonding parameters
根据不同行驶速度和捡拾装置位置分别先建立长0.6 m、1.2 m和1.8 m的方形几何体,用来盛放秸秆颗粒模型。颗粒工厂选择total mass设置为静态生成方式,并分别用上述mate particle秸秆颗粒模型对其进行填充,填充完毕后代表收获后平铺在田间地面的秸秆,如图9所示,在进行颗粒静态填充结束后通过EDEM后处理导出颗粒信息。

(a) 颗粒床侧视图
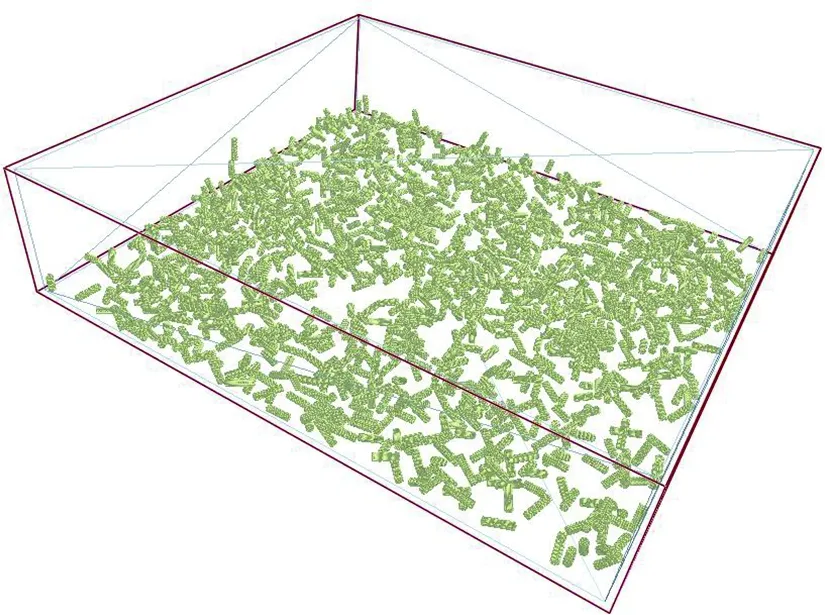
(b) 颗粒床斜二测视图
3.3 EDEM-RecurDyn耦合仿真分析
将静态填充导出的颗粒床作为颗粒工厂,同时将RecurDyn输出的walls模型导入到EDEM-Geometry,如图10所示,不需要在EDEM中对模型添加相关运动,但要注意的是EDEM模型材料属性要与RecurDyn中保持一致。根据三维模型尺寸及运动情况调整EDEM求解域为(x,-2 800 mm,600 mm;y,-350 mm,350 mm;z,-900 mm,750 mm),重力方向为Y轴负方向。

(a) 离散元模型侧视图

(b) 离散元模型俯视图
求解时和RecurDyn中对应仿真时间需一致、步长应为RecurDyn中步长的整数倍,将RecurDyn和EDEM的仿真时长设置为1.5 s,RecurDyn步长为200,防止仿真过程中发生颗粒穿透模型,EDEM固定时间步长设置为1.5×10-6s,为保证更准确查看各时刻秸秆被捡拾及破碎状态,将保存间隔均设置为0.01 s,单元格大小设置为5倍半径,并打开EDEM耦合接口,在RecurDyn中开始计算。
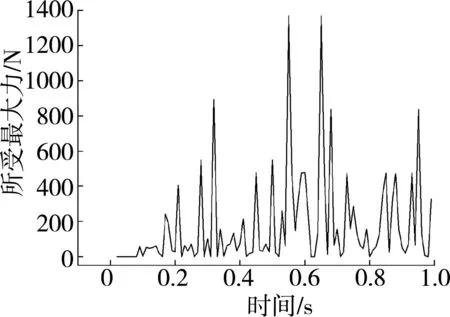
3.3.1 捡拾器刀辊受力分析
通过EDEM后处理导出各组捡拾过程捡拾器刀辊受力数据,按照正交试验序号导入origin进行折现绘图,如图11所示,携带装有“Y”型刀双螺旋排布的捡拾器转速为2 300 r/min,行驶速度为0.6 m/s时受到最大力为2 366.1 N,已知45钢的屈服强度355 MPa[16],小于其应力极限,故均满足使用要求。

(a) Y-1 900 r/min-1.8 m/s
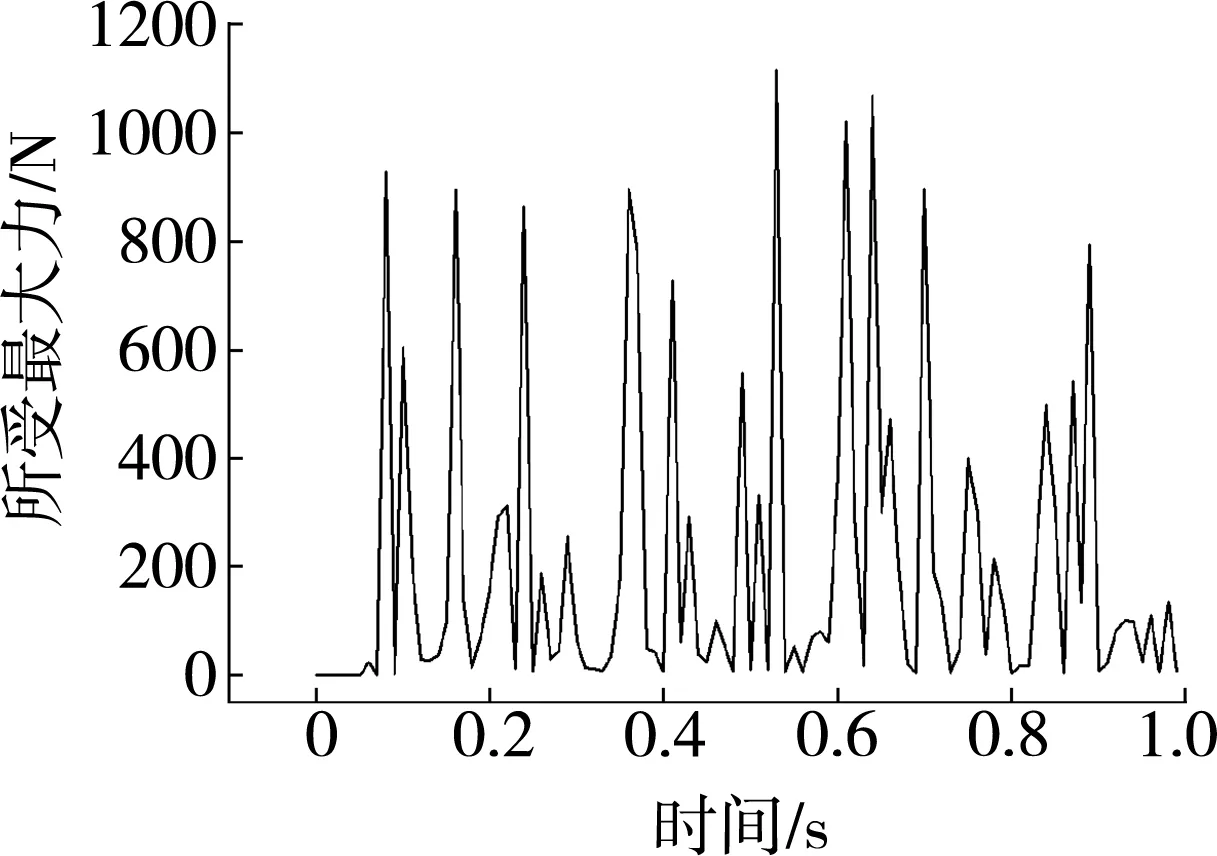
(b) Y-2 100 r/min-1.2 m/s

(c) Y-2 300 r/min-0.6 m/s

(d) YC-1 900 r/min-1.8 m/s
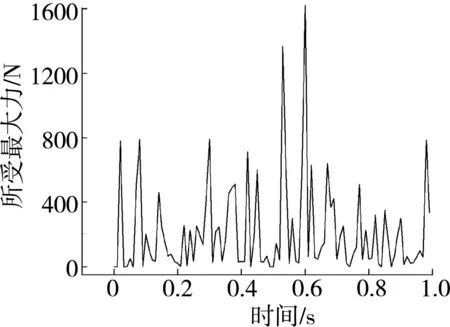
(e) YC-2 100 r/min-1.2 m/s

(f) YC-2 300 r/min-0.6 m/s
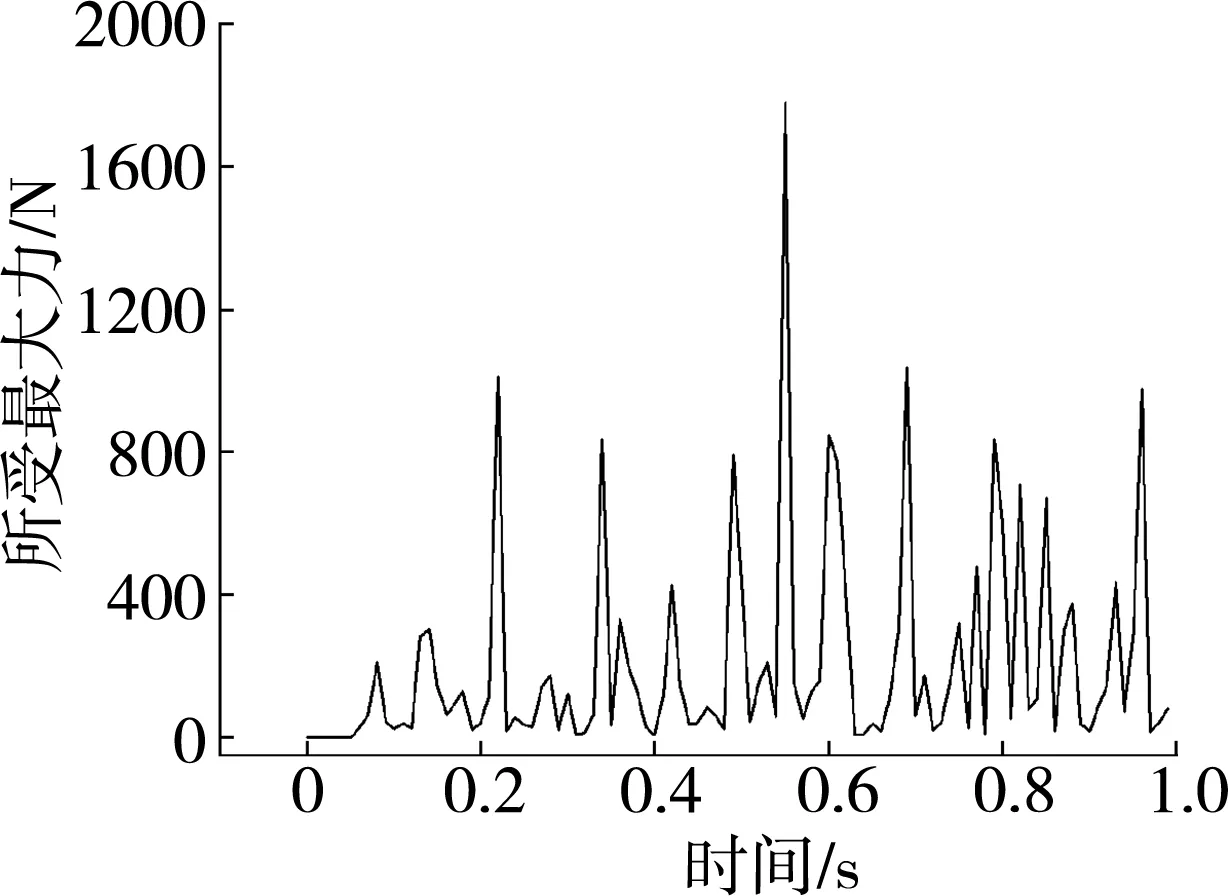
(g) DC-1 900 r/min-1.8 m/s

(h) DC-2 100 r/min-1.2 m/s
(i) DC-2 300 r/min-0.6 m/s
3.3.2 物料在捡拾破碎腔运动轨迹
如图12所示为秸秆捡拾、破碎情况,在EDEM后处理观察各时刻秸秆状态,锤爪对秸秆捡拾效果较好,“Y”型刀对秸秆的破碎效果较好,在捡拾器上方腔室内壁定刀位置时,捡拾刀与内壁定刀将秸秆撕扯并发生大量破碎。
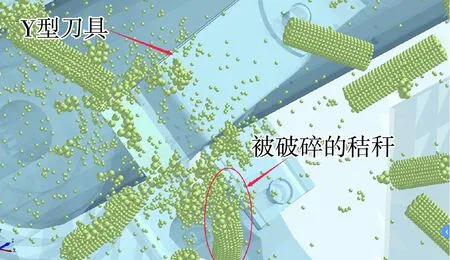
(a) 秸秆与锤爪接触时

(b) 秸秆与Y型刀接触时

(c) 在捡拾器上方破碎时
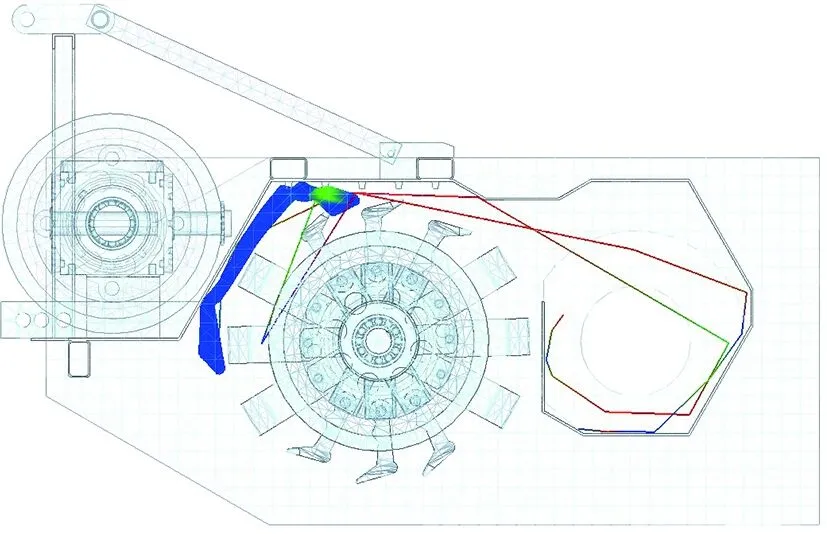
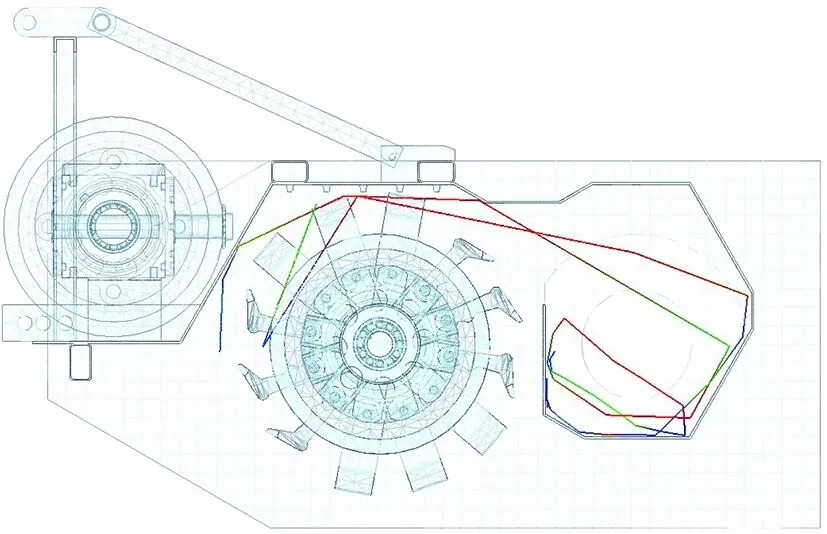
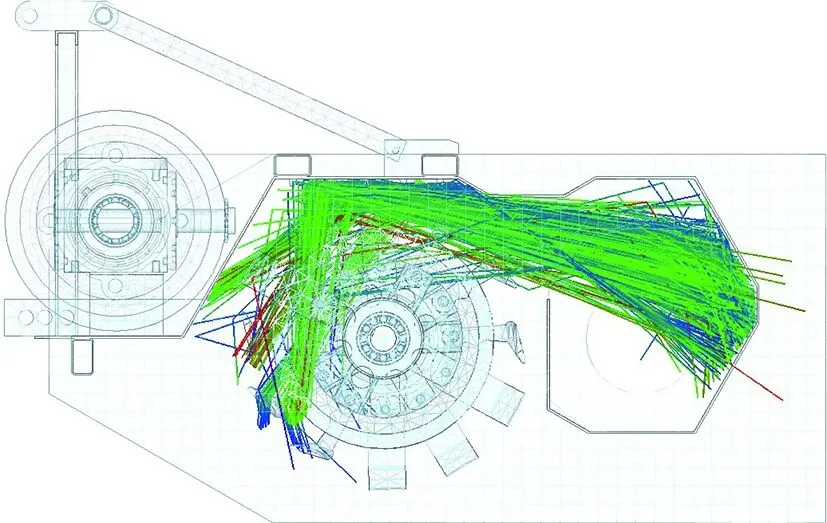
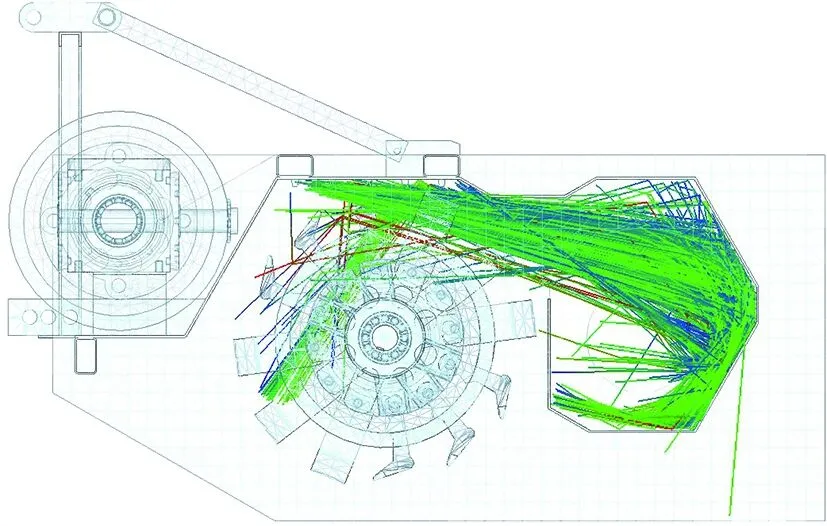
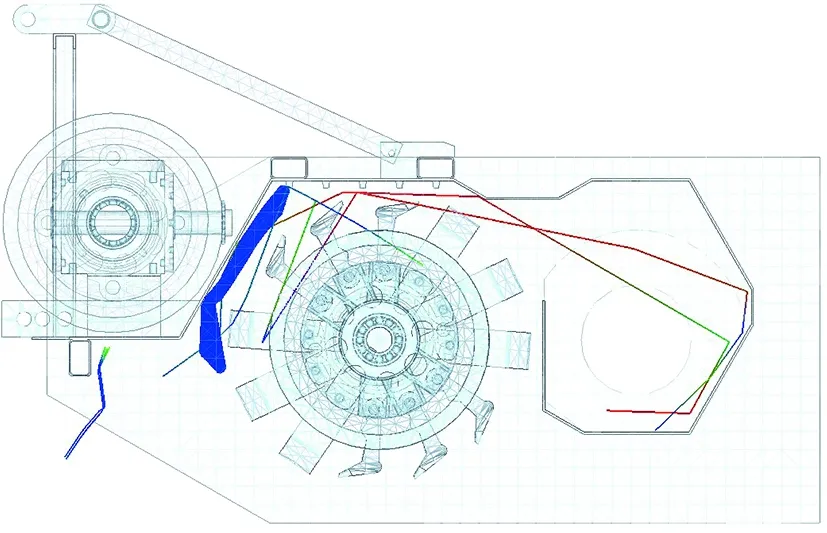
在EDEM后处理添加manual selections选中两小段秸秆颗粒监测其运动轨迹[17],其结果如图13所示。
从时刻1~时刻8可以看出,该段秸秆破碎不够彻底且破碎后只有少数碎屑被抛甩至后方输送搅龙,大部分被甩至捡拾器与输送搅龙中间区域,是因为该段秸秆在捡拾过程中与捡拾刀碰撞次数过少且没有经过捡拾腔内壁定刀部分,没有发生大量撕扯,但后续会由于捡拾器高速旋转可能会将其吸入捡拾器工作圆环区域重新进行捡拾、破碎。
从时刻9~时刻16可以看出,该部分秸秆被捡拾后被顺利抛甩至后方搅龙且破碎效果非常好,观察轨迹是因为该段秸秆被捡拾后与捡拾刀发生多次接触且在捡拾腔内壁定刀发生强烈撕扯。

(a) 时刻1

(b) 时刻2

(c) 时刻3
(d) 时刻4

(f) 时刻6
(h) 时刻8
(i) 时刻9

(j) 时刻10
(k) 时刻11

(l) 时刻12

(m) 时刻13

(n) 时刻14
(o) 时刻15

(p) 时刻16
3.3.3 捡拾率
在捡拾器与输送搅龙中间位置建立一个1×1×1对应方向距离为200 mm×50 mm×150 mm的grid bin group,统计从捡拾秸秆质量[18],与颗粒总质量比值即为捡拾器的捡拾率,如表9所示。

表9 秸秆捡拾率Tab. 9 Straw picking rate
通过仿真数据可知,搭载DC捡拾器的秸秆收集机,在行驶速度为1.2 m/s、捡拾器转速为2 100 r/min时捡拾率最高,达81.85%。
由捡拾率结果可以看出,各种工况下秸秆捡拾率均偏低,这是因为基于EDEM-RecurDyn联合仿真只能模拟分析秸秆物料在捡拾器接触到时才能被捡拾,无法模拟破碎腔内气体流场变化,而实际工作过程中,破碎腔内捡拾器高速旋转时会在该区域形成负压,即使接触不到秸秆物料,也会将附近的秸秆吸入捡拾器并进行破碎、抛甩。
4 结论
1) 本文基于4JQH-120秸秆收集机设计了3种可与之搭配使用的捡拾器,利用ANSYS对其进行模态分析,采用正交试验设计,通过EDEM-RecurDyn进行秸秆收集机捡拾装置部分的离散元-多体动力学联合仿真。
2) 通过模态分析各捡拾器的固有频率及前6阶阵型,确保其都能安全运行;通过观察刀辊受力情况,远小于其应力极限,表明各捡拾器均能满足应力应变要求;通过观察秸秆物料各时刻运动状态,可明确秸秆被捡拾、破碎的机理,为破碎腔结构设计提供了理论依据;通过计算对比各种捡拾器在不同工况下捡拾率,搭载DC捡拾器,在转速为2 300 r/min、行驶速度为0.6 m/s,秸秆捡拾率最高,达81.85%。
猜你喜欢
中国畜禽种业(2022年8期)2022-09-17
环球人物(2022年4期)2022-02-22
佳木斯大学学报(自然科学版)(2022年1期)2022-01-14
吉林化工学院学报(2021年9期)2021-10-24
小资CHIC!ELEGANCE(2021年32期)2021-09-18
南方农机(2021年9期)2021-05-18
小哥白尼(神奇星球)(2020年5期)2021-01-18
冰雪运动(2016年5期)2016-04-16
福建工程学院学报(2015年3期)2015-03-01
小学阅读指南·高年级版(2014年2期)2014-05-27
