基于自适应补偿动态逆飞行姿态控制仿真研究
2023-05-31 13:44:58何雨龙
兵器装备工程学报 2023年5期
耿 宏,何雨龙
(中国民航大学 电子信息与自动化学院, 天津 300300)
0 引言
飞行控制是飞行仿真研究中重要环节[1],飞机运行过程中快速存取记录器(quick access recorder,QAR)数据记录了大量飞行参数,包含控制仿真所需的特性参数、动力学参数、舵面偏转量参数等各项机型参数信息,利用QAR数据训练飞行仿真运动模型成为当前探索解决的热点问题。但仅用QAR数据训练的运动模型误差较大,对此用QAR数据训练飞行姿态仿真控制律,以减小运动模型的误差。
有关数据的方法,国内外学者的研究聚焦于融合历史运行数据来仿真或评价系统实际运行过程[2-4]。李士哲等[5]在关于火电机组负荷控制中运用系统历史数据,仿真其输出特性;Mu等[6]针对二阶连续时间非线性系统,通过观测系统输出生成运行数据库,利用其与当前状态偏差设计数据驱动的自适应滤波结构,讨论了该控制结构下系统的控制效果。Hao等[7]针对SISO系统控制问题,提出系统历史数据驱动的继电反馈神经网络PID(PIDNN-RF)混合算法,利用算法实现模型逼近和轨迹跟踪控制。上述方法在不依赖于模型先验信息情况下,凭借数据驱动方式达到了较好的控制效果,但忽视了对象本身的运动特点。本文基于上述研究中融合历史数据的思想,从机型QAR数据建立的运动模型入手,结合具有自适应补偿的动态逆控制方法,将QAR数据应用到飞行姿态控制仿真中,改善指定机型的仿真效果。
动态逆方法是一种有较强适应性和通用性的控制方法,由于该方法能较好地应对非线性对象各通道间繁杂的解耦工作,且无需反复调节各回路增益[8],因此在飞机非线性控制中也有较多应用[9-11]。如何在QAR数据所建立的运动模型基础上,利用QAR数据设计补偿结构从而校正运动模型误差,是本文需要解决的重点问题。
针对上述问题,本文以飞机为研究对象,利用奇异摄动理论划分姿态三通道,应用动态逆控制策略,实现该机型姿态控制律仿真。考虑辨识区间内运动模型存在误差的情况,利用QAR数据与模型输出量的偏差设计自适应补偿环节,通过补偿结构逼近逆误差,从而进行修正。最后选择典型自动飞行模式进行仿真,通过对比模型输出与原始QAR数据,验证该方法有效性。
1 飞行仿真运动模型
本文采用的运动模型是利用机型QAR数据建立的飞机六自由度非线性模型,其中表征气动特性的相关系数由文献[12]中通过QAR数据辨识所得,各系数在所划分的任一迎角区间内为定常值,辨识结果在[1,15]deg迎角范围内有效。运动模型中与姿态量相关的气动力矩多项式方程表达如下:
(1)
式中:Ml、Mm、Mn分别表示滚转力矩、俯仰力矩和偏航力矩;Q为动压;S、b、c为翼型常量;p、q、r分别对应三轴角速度;C*0为各力矩基本系数。C*δα、C*δe、C*δr为力矩相对于控制舵面的控制导数;C*α、C*β为力矩相对于2个气流角的稳定性导数;C*p、C*q、C*r为相对于角速度的气动导数;V为空速。
上述常量通过机型手册匹配,基本系数及相关气动导数由机型的QAR数据辨识求得,从而将通用模型更新为具备机型的运动模型。但基于QAR数据的辨识方法通常基于准定常假设,即假定分段区间内表征气动导数为常值,因此当区间内定常系数与实际存在较小偏差,运动模型更新时由数值积分持续累积误差,最终模型输出与QAR数据存在较大误差。
2 姿态控制律
运动模型的状态方程是关于飞行状态量与控制输入的函数,通过反馈线性化可将控制输入量显式地与姿态角这类飞行状态量建立表达关系,易于姿态控制律设计。非线性模型通过反馈线性化,表达如下:
(2)
y=h(x)
(3)
其中: 状态量为姿态角度和角速度集合,控制输入量为控制舵面的偏转量:
x=[p,q,r,φ,θ,ψ]T
u=[δa,δe,δr]T
(4)
状态量集合中Φ、θ、ψ分别表示滚转角、俯仰角和偏航角;控制输入量集合中各变量与副翼、升降舵、方向舵偏转量一一对应。式(2)(3)中,f(x),g(x),h(x)均为关于飞行状态量x的非线性函数,g(x)为控制分布函数矩阵,u为控制输入量。f(x)和h(x)与u不存在显式关系。基于状态反馈的动态逆控制策略应用于三通道姿态控制,其前提是满足被控对象的状态量和控制量处于同一维度,保证系统可控,因此结合奇异摄动理论,利用多时间尺度思想将姿态回路划分为快慢两层回路进行控制。本文快回路对应变量为x集合中角速度变量,即p、q、r;慢回路对应变量为集合中姿态变量,即Φ、θ、ψ。层叠式飞行姿态控制器结构示意图如图1所示。

图1 飞行姿态控制结构示意图
2.1 角速度快回路控制律
角速度回路即为内环快回路,其主要实现的功能目标是计算控制舵面的理想偏转角度。如上部分所述,快回路中状态量与控制输入量通过反馈线性化,整理为以下形式:
(5)
式中,xa、xb表示状态量集合,具体含义为:
xa=(V,α,β,p,q,r,δe)
xb=(Q,α,β,δe)
(6)
f*(xa)为非线性力矩函数,g*(xb)为操纵力矩函数。具体表达如下:
(7)
式中:CMl、CMm、CMn为力矩系数,根据式(1)多项式函数求出,ci(i=1…9)根据转动惯量与惯性积得到,g*(xb)表示状态方程中分离出的仅与u相关的线性项,如下所示:
(8)
因此综合式(5)、式(7)和式(8),快回路动态逆控制律表达为:
(9)
其中,快回路状态量的动态特性通过内环比例增益kp,kq,kr和指令信号通过差分近似表达:
(10)
执行机构以一阶惯性环节近似,包括增益和控制舵面偏转幅度限制,其中限制区间从飞行机组操作手册中得到。
2.2 姿态角慢回路控制律
姿态回路作为外环慢回路,其主要功能是由姿态角计算理想角速度。设计思路与内环类似,将姿态角状态方程改写为仿射非线性形式。机体系中对应的f(x)为零,输入量为期望的姿态角变化速率,由如下形式描述:
(11)
其中,期望姿态变化率由给定合适的回路增益kΦ,kθ,kψ,并根据姿态角指令信号计算求得。期望姿态角变化速率表达形式与式(10)一致。因此慢回路动态逆控制律表达为:
(12)
2.3 内外环增益取值
在机体系下的运动模型可简化为以下形式:
(13)
式中:xa、xb物理意义与式(6)对应,x1、x2为飞行状态量集合,对应慢、快变量,分别表示姿态角和角速度:
x1=[φ,θ,ψ]T
x2=[p,q,r]T
(14)
各通道动态逆控制律可通过以下形式描述:
(15)

(16)
(17)
为验证控制系统稳定性,取Lyapunov函数为:
L=1/2eTe
(18)
联立式(17) 并对式(18)求导,有:

(19)
(20)

3 自适应补偿结构
由上述动态逆控制过程可以看出,实现控制的前提是保证能精确求解逆过程,使控制律设计能获得满意的精度。实际上,基于QAR数据建立的运动模型与实际飞行存在一定差异,导致式(7)和式(8)存在误差,控制器与模型对消不够完全,仿真模型输出与实际飞行姿态误差较大,无法逼近机型真实控制特性。针对该问题,以QAR数据作为参考,并借助神经网络较强的自适应能力,通过引入QAR数据相关量与同时态下模型输出姿态变量偏差,设计基于自适应补偿的动态逆控制结构,修正逆系统求解带来的误差。自适应补偿结构的动态逆控制框图如图2所示。
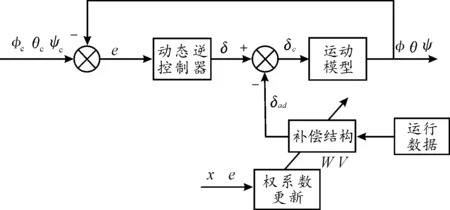
图2 自适应补偿控制框图
利用神经网络较强的逼近能力对控制输入量进行补偿,用以提高网络的训练精度和收敛速度。神经网络结构采用单隐层结构,具体结构如图3所示。

图3 神经网络结构
对于给定输入xnn,神经网络输入输出映射关系可以表示为:
ynn=WTσ(VTxnn)
(21)
式中:σ(·)为激活函数,选用Sigmoid函数σ(x)=ex/(ex+e-x),V和W分别为输入层到隐含层、隐含层到输出层的权系数。针对三通道动态逆姿态控制所设计的神经网络,采用18-5-3结构,给定网络输入xnn和网络输出ynn为:
(22)
其中,e=x2-x2c表示快回路中角速度与QAR数据的偏差。神经网络通过调整权系数而抵消控制系统逆误差,权系数更新算法选为[13]:
(23)
(24)
式中:kw、kv为学习率;κ为调节因子,均为常值,根据仿真效果进行调整。
当飞行过程某一飞行阶段姿态变化较快,控制输入量变化频繁时,为及时对控制系统输入量进行补偿,引入自适应鲁棒调整项[14],定义为vr,具体表达为:
(25)
其中:
(26)

δad=Δδ+vr
(27)
从而叠加控制量补偿的控制律更新为:
(28)
根据式(21)—(28)即可求出叠加自适应补偿结构的运动模型输出。
4 仿真验证
为验证自适应补偿的动态逆控制器在飞行姿态控制中的应用效果,本节在Matlab/Simulink平台下分别对其阶跃输入响应和真实姿态动态变化轨迹仿真进行实验。
S-Function中定义机型相关常量、基本重力加速度及6自由度动力学方程,作为实例化实现。相关参数设定为m=42 400 kg,g0=9.8 m/s2,S=122.4 m2,b=37.57 m,c=4.29 m;转动惯量和相对惯性积由经验公式估算得到[15];舵面偏转幅度限制在±17 (°)/s,速率限制在±25 (°)/s。阶跃响应仿真中,设置初始时刻飞行状态为零;基于QAR数据的仿真实验中,初始时刻飞机理想位置和控制形态通过fminsearch函数求解给出。
此外,由于QAR数据采样率低,使其应用受限,因此需对数据进行必要的重采样工作。鉴于飞机机动性不强,各状态量改变趋于平稳渐变,故仿真时均采用三次样条插值(Spline)[16]对数据进行重采样以适应仿真需求。
4.1 阶跃响应实验
本节针对俯仰通道进行俯仰角阶跃响应实验。从QAR数据中选取一段俯仰角度变化特征较为明显的数据,数据曲线如图4所示。
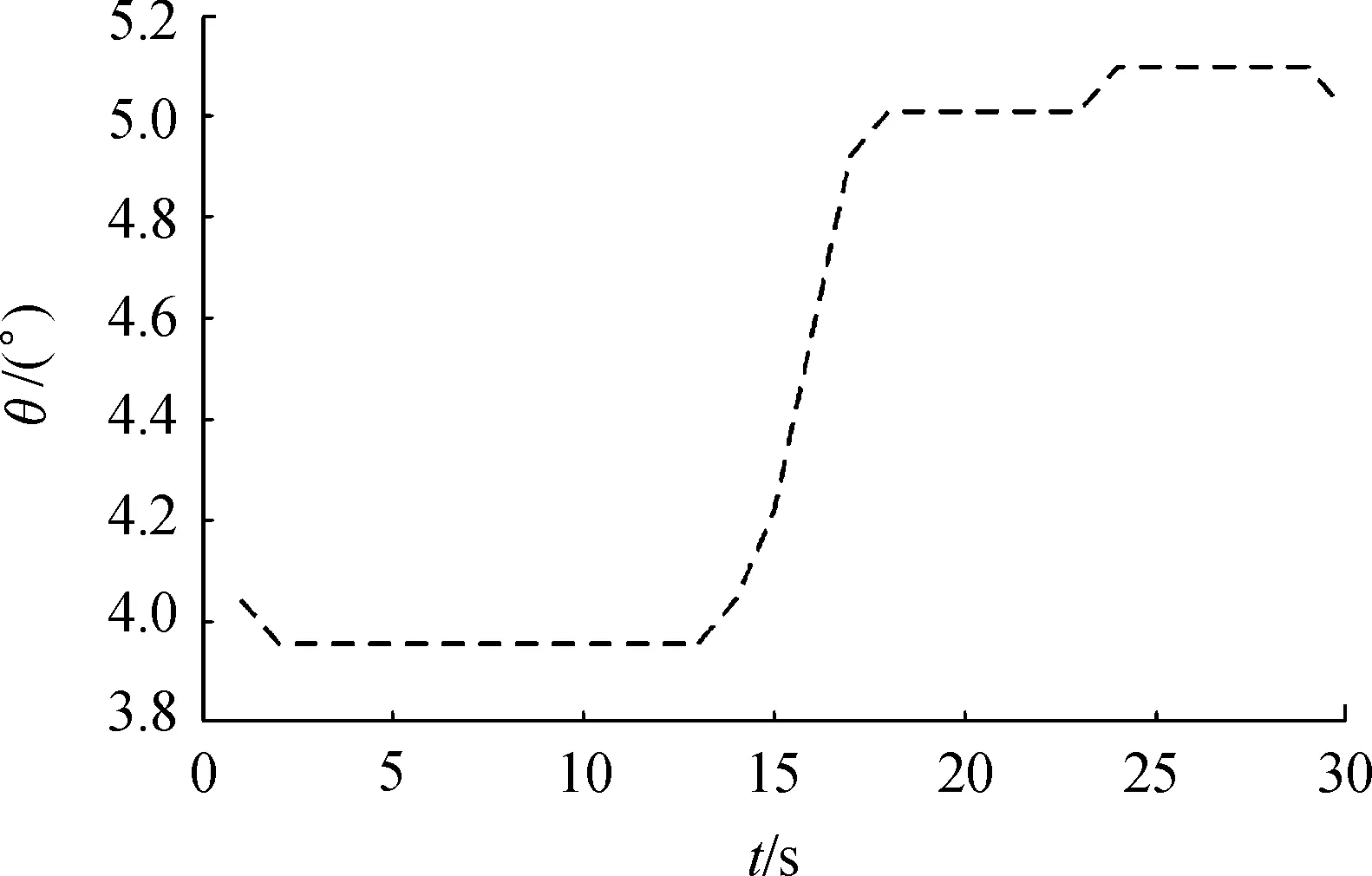
图4 QAR俯仰角变化曲线
由图4可以看出,飞机在4 s内俯仰角度由4°上升至5°左右,并在5°上下小范围波动。本节阶跃响应实验旨在通过动态逆控制方法展示其控制特性。为观察控制方法的响应特性并验证叠加控制量补偿的有效性,本节实验给定阶跃输入模拟1.5°俯仰指令信号,设置阶跃时间为5 s,仿真时间为30 s,求解器采用内置的Runge-Kutta定步长方法,仿真步长设定为0.04 s,快回路中比例增益kq设为10,慢回路中比例增益kθ设为3。根据式(21)—式(28)得到叠加自适应补偿结构的运动模型输出。动态逆控制效果如图5,叠加自适应补偿环节的控制效果图6所示。
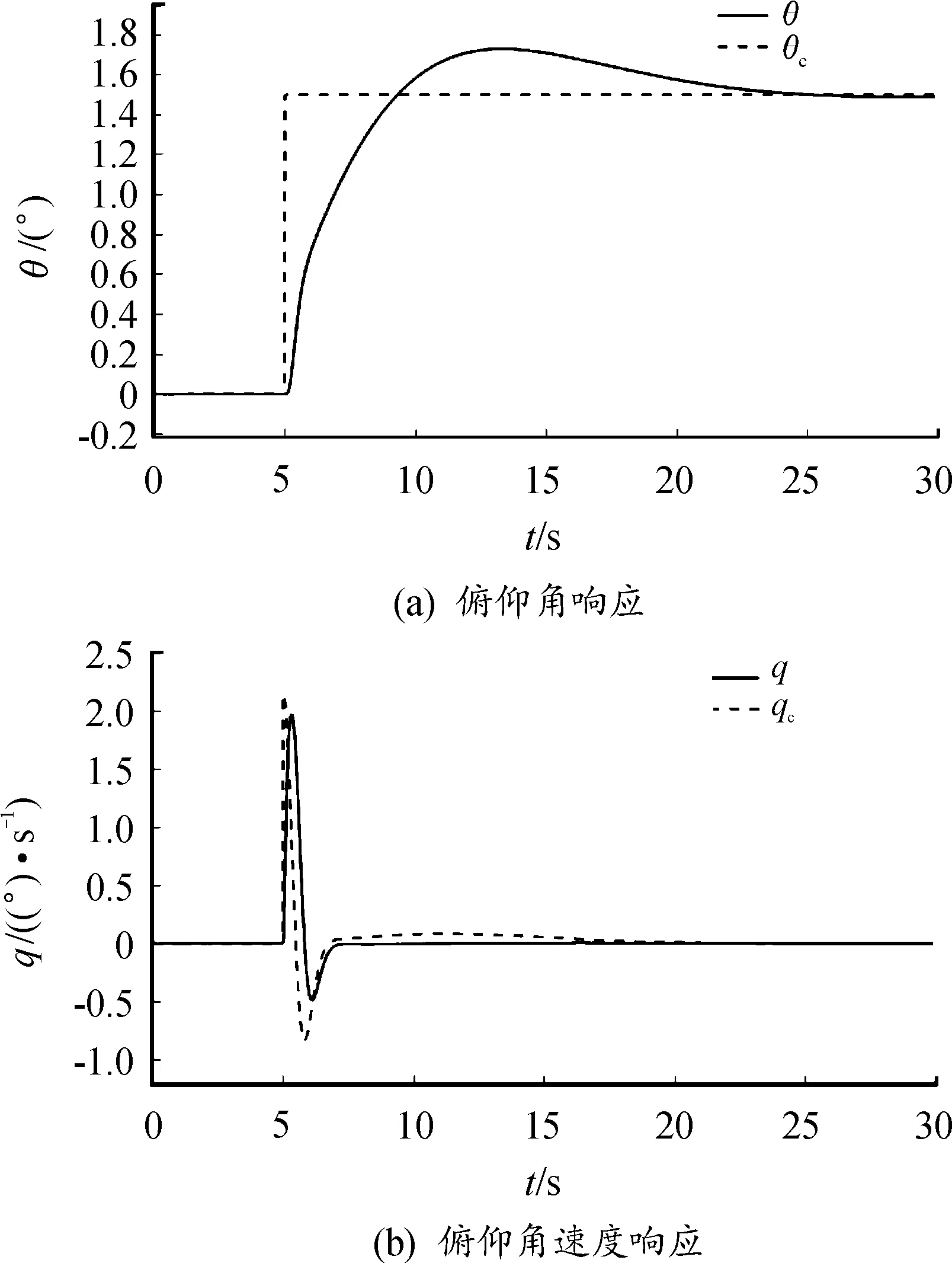
图5 无补偿俯仰通道阶跃输入测试

图6 补偿逆误差俯仰通道阶跃输入测试
由图5、图6可以看出,俯仰通道的动态逆控制响应状态良好,可以达到给定目标指令且达到稳态后始终保持输出稳定。同时对比输出曲线可以看出,叠加自适应补偿环节的动态逆控制系统与未补偿逆误差的控制系统相比较,模型输出的俯仰角角度在3 s内上升1.5°,达到给定的目标指令,且俯仰角超调量减小到8%以内,能够体现飞机真实控制特性。
4.2 姿态仿真验证
飞机在爬升或下降阶段时,自动驾驶(AP) 通常接入开放模式,由俯仰方式控制飞行速度达到设定目标。该模式下,AP控制副翼和方向舵协调配合升降舵改变俯仰角,从而控制速度达到制导目标。该模式下飞机姿态变化直接表征其控制特性。因此本节实验以开放下降模式(OP DES)为例,针对姿态三通道进行仿真实验。选取QAR数据中开放下降模式(AP LONG MODE:OPEN)处于激活状态的数据作为参考,各项状态量直接反应真实飞行过程。为验证方法的有效性,选取开放模式下训练样本外的数据作为验证,插值后的样本点为10 219,该过程中飞行高度从11 367 ft开始,以升降舵控制速度下降高度,期间完成一次左偏航,同时滚转角由0°变化至-21°,当飞机按照新的航向飞行时,滚转角基本保持0°。以定常平飞作为初始状态,根据下降段约束条件设定适应度函数,通过fminsearch函数模块迭代求解初始状态。状态量集合设定为X,在高度11 367 ft,飞行速度259 kts下,解析初值为:
X=[259,0.23,1.67,0,0,0,0,1.66,0]T
集合中各变量分别表示为飞行速度、侧滑角度、迎角角度、机体系下绕x轴角速度、绕y轴角速度、绕z轴速度、滚转角、俯仰角和偏航角。动态逆结构中快回路各通道增益设置为10,慢回路增益设为3。仿真时间设为35 s,仿真步长设为0.02 s,对相关量进行预处理使其采样频率与平台求解步长一致。
三通道动态逆控制结构中快回路理想控制量输出与叠加自适应补偿环节的控制量输出对比如图7所示,OP DES模式下飞行姿态仿真结果如图8所示。
图7中点线为叠加补偿结构内环计算的期望控制量输出,实线为动态逆控制方法中控制量输出曲线。从图中可以看出自适应补偿的动态逆控制量输出曲线更为平滑,随着神经网络权系数更新,控制量在较短时间内趋于稳定。图8中点线为经过三次样条插值处理的原始QAR数据,由对比图可以看出,叠加自适应补偿结构的动态逆控制策略能更好地应对复杂的姿态变化情况,姿态仿真输出更符合QAR数据中所表现出的控制特性,且有效减小了姿态角误差。CCAR-60部模拟机客观测试标准规定,在正常飞行条件下滚转角容差为2°,俯仰角容差为1.5°,偏航角容差为2°,由此可看出下降段仿真中三通道姿态变量误差均满足飞行模拟机鉴定标准。姿态角最大误差主要出现在仿真前期,是由于初始状态点通过fminsearch函数求解,求解前需给定上下限,且OP DES模式下的QAR数据是随机选取的,若设定范围与实际状态相差较大,则寻优函数在该范围下的求解精度较低,导致飞机所给定的初始状态与所选QAR对应变量偏差较大,但仿真开始3 s后,由自适应补偿的动态逆控制器进行调节,仿真效果逐渐提高、误差也相应减小。因此,基于自适应补偿的动态逆姿态控制具备相当满意的控制效果,且可以有效降低姿态角误差。

图7 控制量变化对比图

图8 姿态回路控制仿真对比图
5 结论
本文中以飞机为研究对象,将基于神经网络补偿结构的自适应动态逆控制策略,应用于三通道姿态控制仿真中,其中基于状态反馈的动态逆结构能实现三通道姿态控制,同时结合QAR数据所设计的神经网络补偿结构能修正运动模型更新而带来的误差,使动态逆控制方法可以更加准确地逼近真实飞行规律,且模型输出量误差符合飞行模拟机鉴定标准,满足工程需求。后续研究工作中,将进一步通过对QAR数据分析,根据不同机型QAR数据仿真对应机型的自动飞行控制律。
猜你喜欢
黑龙江大学自然科学学报(2021年4期)2021-11-19 07:05:06
装备制造技术(2021年1期)2021-05-21 07:54:44
天津教育·下(2018年9期)2018-07-13 08:25:47
自动化学报(2018年2期)2018-04-12 05:46:05
中学生数理化·高一版(2017年3期)2017-07-08 11:55:27
通信电源技术(2016年4期)2016-04-04 02:57:36
火控雷达技术(2016年1期)2016-02-06 02:18:01
中国铁道科学(2015年4期)2015-06-21 06:46:06
电力自动化设备(2013年11期)2013-09-18 02:55:14
电气电子教学学报(2012年1期)2012-10-12 03:27:48