北斗三号新频点(B1C/B2a)单历元RTK定位性能分析
2023-05-29 08:19:40陶振强陈健赵兴旺刘超刘春阳
全球定位系统 2023年2期
陶振强,陈健,赵兴旺,刘超,刘春阳
(1.安徽理工大学空间信息与测绘工程学院,安徽 淮南 232001;2.安徽理工大学 矿山采动灾害空天地协同监测与预警安徽普通高校重点实验室,安徽 淮南 232001;3.安徽理工大学 矿区环境与灾害协同监测煤炭行业工程研究中心,安徽 淮南 232001)
0 引言
北斗卫星导航系统(BDS)由我国自主建造,为全球用户提供全天时、全天候、高精度的导航、定位和授时(PNT)服务[1-2].2020 年6 月23 日,北斗三号全球卫星导航系统(BDS-3)的最后一颗地球静止轨道(GEO)卫星于西昌卫星中心发射成功,标志着BDS圆满完成全球组网.BDS-3 提供B1I、B3I、B1C、B2a 和B2b 五个公共服务信号,在保留北斗二号卫星导航系统(BDS-2)B1I 与B3I 信号的同时,新增B1C、B2a 信号.新信号与GPS、Galileo、准天顶卫星系统(QZSS)部分信号重叠,有助于多全球卫星导航系统(GNSS)间的兼容与互操作,其中B1C 频点与GPSL1 频点、Galileo E1 频点和QZSSL1 频点重叠,B2a频点与GPSL5 频点、Galileo E5a 频点、QZSSL5 频点重叠[3-6],而对于BDS-2 B2I 频点,BDS-3 保持其频率不变,仅改变调制类型并更名为B2b.
自BDS 建设以来,国内许多学者对BDS 的定位性能进行了丰富的研究.文献[7-8]基于亚太及周边区域内部分MGEX(Multi-GNSSExperiment)跟踪站数据分析不同卫星选择对相对定位精度的影响,指出利用BDS-2/BDS-3 进行相对定位时,采用GEO 卫星会降低解算精度并延长解算时长.文献[9]利用国际GNSS 服务(IGS)测站数据分析BDS-2、BDS-2/BDS-3 组合的B1I、B2b 与B3I 三频短基线相对定位精度,指出BDS-3 卫星的加入能够有效改善BDS 卫星空间分布结构,但未对BDS-3 新频点定位性能进行分析.文献[10]基于国内MGEX 测站数据分析BDS-2、BDS-3、BDS-2/BDS-3(B1I+B3I)双频组合在不同截止高度角下短基线定位性能,指出随着截止高度角的增加,BDS-2/BDS-3 组合定位能够有效改善单系统在极端环境下的定位性能.文献[11]从观测数据量、卫星截止高度角、卫星跟踪时间和采样率四个方面评估了BDS-3 新信号(B1C+B2a)双频短基线实时动态(RTK)定位性能,结果表明,在较优解算策略下,BDS-3 新信号水平精度优于1.2 cm,垂直精度优于2.2 cm.文献[12]探讨了BDS-3/GPSB1C/L1 单频松组合与紧组合定位性能,结果表明紧组合RTK 定位性能优于松组合RTK.文献[13]考虑紧组合模式下的系统间偏差(ISBs),基于单差重叠频点ISBs 估计对BDS-3 与Galileo 组合RTK 定位性能进行研究,指出BDS-3 和Galileo 组合RTK 相对于BDS-3与Galileo 单系统在模糊度固定率与定位精度上能够提升10%以上.
综上所述,目前对BDS-3 新频点的定位性能有一定的研究基础,但鲜有文献对BDS-3 单频、双频以及多频定位性能进行系统性的研究与比较.为探究BDS-3 新频点RTK 定位性能及BDS-3 新频点与BDS-3/BDS-2 旧频点RTK 定位性能差异,本文基于MGEX 测站数据设计三条基线进行试验分析.
1 BDS 相对定位模型
1.1 函数模型
GNSS 接收机接收的基本测量值包含测距码与载波相位观测值,测距码与相位观测值方程如下:
式中:P为测距码量测值;上标i为观测卫星;下标p和f分别为基站与载波频率;φ为载波相位量测值;为卫星i相位中心到接收机p相位中心的几何距离;c为光速;δtp为接收机钟偏差;为卫星钟偏差;λ为频率f下的波长;为整周模糊度;分别为信号传播过程中电离层与对流层误差;为包含量测噪声、卫星硬件延迟误差和接收机硬件延迟误差在内的其余误差.根据式(1)、(2)先在测站p、q间求差,再在卫星i、j间求差,可得双差观测方程如下:
在双差观测方程中,完全消除了接收机端与卫星端的时钟偏差,当基线长度较短时,基本消除了对流层与电离层延迟误差[14-15].
1.2 随机模型
对卫星i求站间单差后,则卫星i的单差观测方程的量测噪声可表示为
式中:下标s为观测值类型;常数a为量测误差因子[16],对于测距码量测值常数a取0.3,对于载波相位量测值常数a取0.003;Ei为卫星i的高度角.若当前历元共有n共视卫星,则可构成n个单差观测方程,其量测噪声方差阵为
由误差传播定律可知双差观测方程量测噪声方差阵为
1.3 卡尔曼滤波(Kalman)模型
本文采用Kalman[17]进行相对定位参数估计,Kalman 状态方程和观测方程如下:
式中:k为历元;Φk,k-1为k-1历元至k历元的状态转移矩阵;e k-1为过程噪声向量;H k为观测值与系统状态之间的关系矩阵;Δk为量测噪声向量.
Kalman 递推过程包括时间更新与量测更新,主要步骤如下:
式中:P k,k-1与P k分别为第k个历元的时间更新与量测更新方差阵;Q k-1为系统噪声方差阵;K k为增益矩阵;R k为量测噪声方差阵.经Kalman 解算可得双差模糊度浮点解,再利用最小二乘模糊度降相关平差法(LAMBDA)[18-19]固定双差模糊度,估计准则为
式中:N和N0分别为双差模糊度浮点解与固定解;Q N为双差模糊度浮点解协方差阵.求得模糊度固定解后,利用式(17)求取测站固定解坐标:
式中:X为Kalman 解算所得浮点解坐标;QXN为双差模糊度浮点解与基站坐标浮点解的协方差阵.设置模糊度固定检验阈值Ratio[20-21]值(整数解中次小和最小验后方差比)为3.
2 试验数据与解算策略
2.1 试验数据
本文选取6 个MGEX 测站2022 年年积日(DOY)第2—8 天的观测数据进行解算分析,数据采样间隔为30 s,其中KIR8-KIRU 基线长4.5 km,WUH2-JFNG 基线长12.9 km,POL2-BIK0 基线长23.4 km,测站位置如图1 所示,基本信息如表1 所示.

表1 MGEX 测站基本信息

图1 MGEX 测站位置分布
2.2 试验方案
为系统分析BDS-3 新频点B1C/B2a RTK 定位性能,分别制定单频、双频与多频试验方案,其中双频与多频方案均采用非组合模式.文献[5-6]研究表明,利用BDS 进行相对定位时采用GEO 卫星会降低定位精度并延长解算时间,因此试验均剔除GEO 卫星.同时,由于仅WUH2 测站可跟踪到B2a+B2b 信号,无法利用B2a+B2b 信号进行相对定位解算试验,因此,本文未对B2a+B2b 信号进行分析.具体试验方案如表2 所示,试验解算策略如表3 所示.

表2 试验方案

表3 相对定位解算策略
图2 为KIR8 测站2022 年DOY 第2 天的观测卫星数(不包括GEO 卫星)与几何精度衰减因子(PDOP)值,表4 为三条基线移动站平均各天可用卫星数.因KIR8 测站位于北欧并结合图2(a)分析可知,剔除GEO 卫星后,KIR8 测站最多能观测到7 颗BDS-2 卫星,最少仅能观测到2 颗;BDS-3 MEO 卫星较多,仅包含3 颗GEO 卫星,剔除GEO 卫星对BDS-3 影响较小,KIR8 测站观测到的BDS-3 卫星最多为13 颗,最少为9 颗.BDS-3 最大PDOP 值为2.35,平均PDOP 值为1.88;KIR8 测站观测到的BDS-2/BDS-3 卫星最多为20 颗,最少为12 颗,由于观测卫星数的增加,BDS-2/BDS-3 双系统PDOP 值优于BDS-2 与BDS-3 单系统,最大PDOP 值为2.19,平均PDOP 值为1.63,说明BDS-2/BDS-3 组合卫星的稳定性优于单系统.
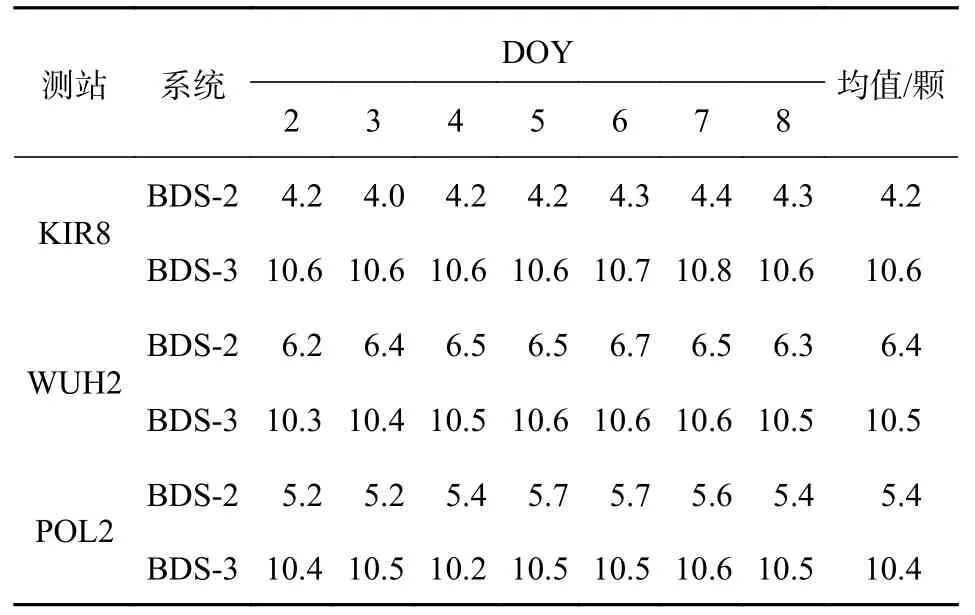
表4 三条基线移动站各天平均可视卫星数

图2 KIR8 测站DOY 第2 天观测卫星数与PDOP 值
2.3 试验结果分析
本文对BDS-3 单频方案与BDS-2/BDS-3 多频方案分别进行静态、动态试验,以SINEX 周解测站坐标为参考值,各方案逐日进行解算,将各天模糊度固定历元对应固定解坐标取均值作为当天的定位结果,连续7 d 的定位结果取均值作为最终的解算结果,为便于分析,将定位误差进行取绝对值操作.
2.3.1 单频RTK 精度分析
图3 与表5 为单频静态模式三条基线各方案在东(E)、北(N)、天顶(U)方向的定位误差,由于BIK0测站不能接收到BDS-3 B2b 频点信号,而JFNG 测站接收的BDS-3 B2b 频点信号的数据完整率很低,因此,本文未分析基线WUH2-JFNG 与POL2-BIK0 B2b 频点的定位精度.由表5 可知,三条基线各频点均能达到厘米级定位精度,以KIR8-KIRU 基线为例,BDS-3 B2a 频点定位精度最高,E、N、U 方向定位精度分别优于4.7 mm、4 mm 与5.9 mm,相对于BDS-3 B1I 与BDS-3 B3I 旧频点点位定位精度分别提高17%、19%,BDS-3 B2a 模糊度固定率也最高,相对于BDS-3 B1I 和BDS-3 B3I 分别提高2%、1%.BDS-3 B1C 频点定位精度略低于其余四种频点,其E、N、U 方向定位精度分别优于5.6 mm、4 mm 和9.4 mm,点位定位精度优于1.2 cm.由图3 可知:当基线长度不超过5 km 时,BDS-3 B2a 定位精度最高,BDS-3 B1C 定位精度略低,各频点定位精度互差保持在毫米级,定位性能相当;随着基线长度增加,BDS-3 各频点定位误差呈递增趋势,但BDS-3 B2a 频点定位精度下降幅度高于BDS-3 B1C 频点.

表5 单频静态模式下各方案定位精度与模糊度固定率
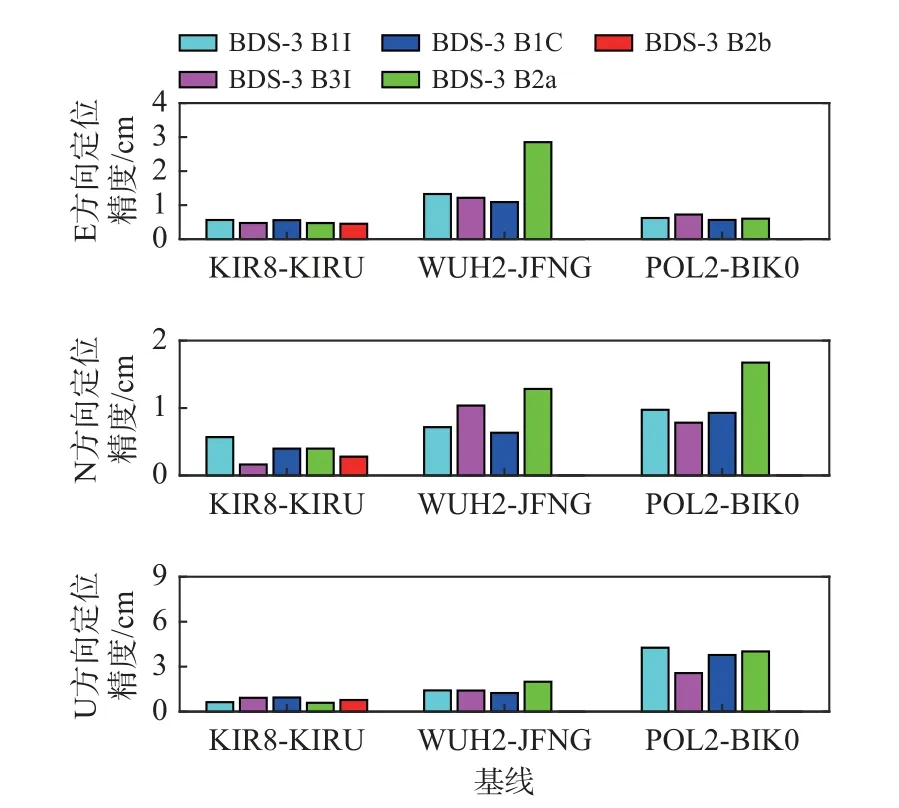
图3 单频静态模式下各方案E、N、U 方向定位精度
图4 与表6 为单频动态模式三条基线各方案在E、N、U 方向的定位误差,由于篇幅有限,随机选取KIR8 测站2022 年DOY 第6 天的解算结果,图5 与图6 分别为单频静态与动态模式各方案模糊度固定Ratio 值,图7 与图8 分别为单频静态与动态模式各方案基线解算残差.由表6 可知,动态模式下各方案定位精度与模糊度固定率相比于静态模式均有所下降,但各方案点位定位精度仍能保持在厘米级,模糊度固定率均高于91%.以KIR8-KIRU 基线为例,BDS-3 B2a 频点定位精度高于BDS-3 B1C,略低于BDS-3 B1I 与BDS-3 B3I 频点定位精度,其E、N、U 方向定位精度分别优于7 mm、2.3 mm 与2.47 mm.总体来说动态模式下各方案E、N 方向定位精度变化较为平缓,U 方向定位精度相比于静态模式下降较为明显.由图5 和图7 可知:在第1 258 历元(图中黑线与横轴交点)前,可视卫星数较多,星座空间结构良好,各单频方案模糊度固定Ratio 值均远大于阈值;在第1 258 历元后,由于可视卫星发生变化使模糊度固定Ratio 值呈下降趋势,BDS-3 B1I、BDS-3 B1C与BDS-3 B2a 部分历元模糊度固定Ratio 值小于阈值,对应图6 和8 中BDS-3 B1I、BDS-3 B1C 与BDS-3 B2a 部分历元相位残差增大.其中BDS-3 B2b 动态模式下1 258 历元后模糊度固定Ratio 值相比于其他单频方案下降最为明显.
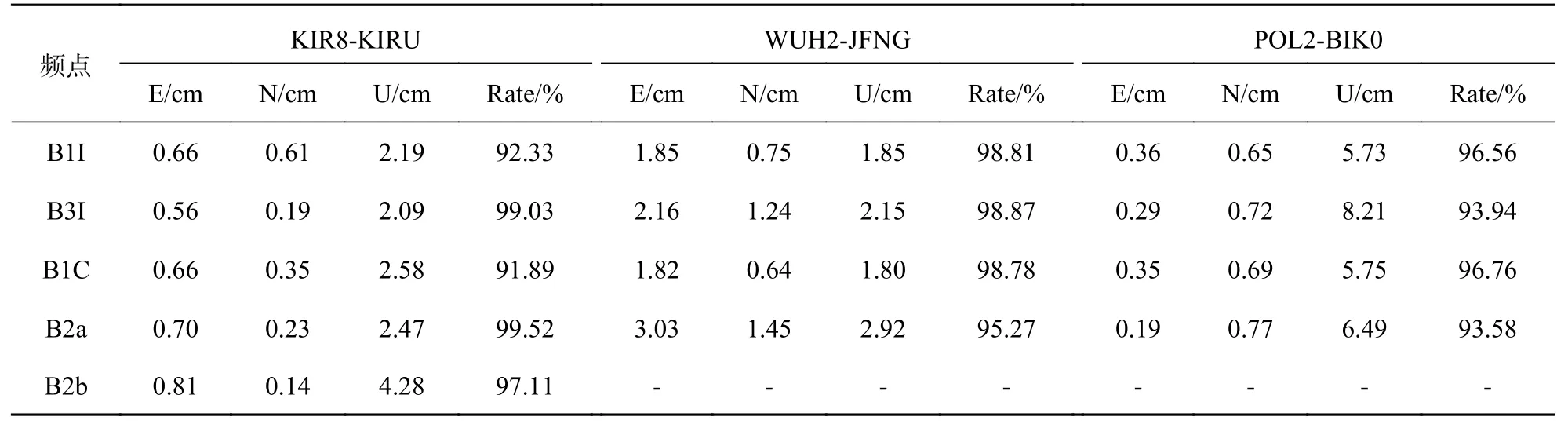
表6 单频动态模式下各方案定位精度与模糊度固定率
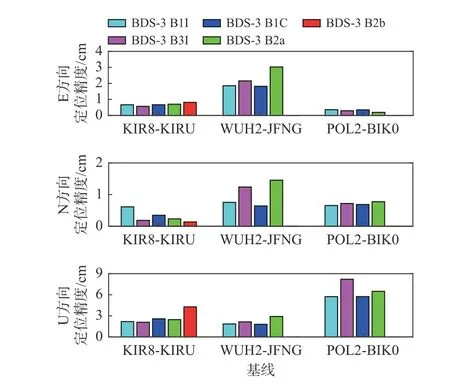
图4 单频动态模式下各方案E、N、U 方向定位精度
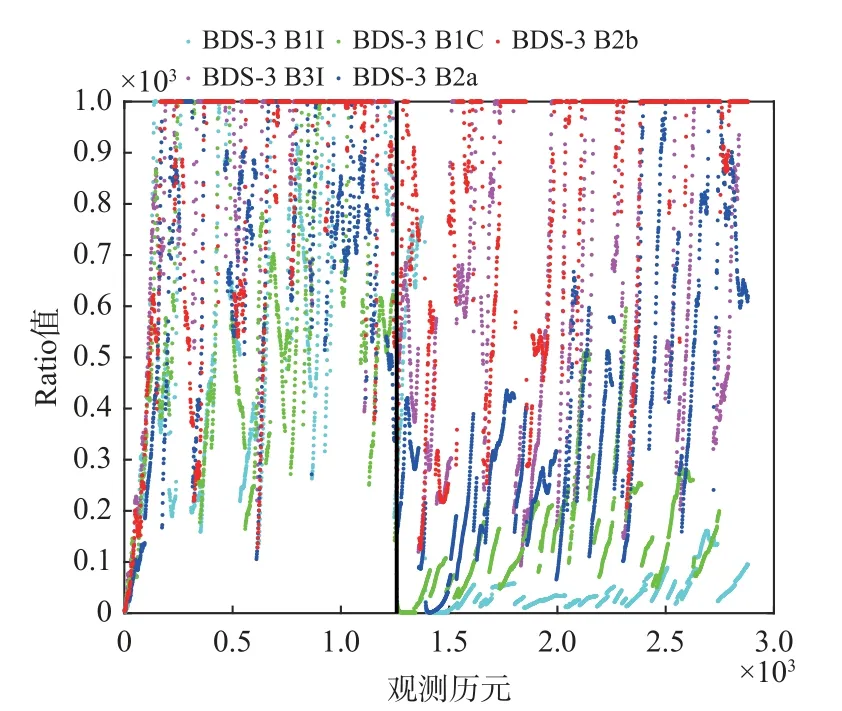
图5 基线KIR8-KIRU 单频静态模式各方案Ratio 值

图6 基线KIR8-KIRU 单频动态模式各方案Ratio 值

图7 基线KIR8-KIRU 单频静态模式各方案相位残差

图8 基线KIR8-KIRU 单频动态模式各方案相位残差
2.3.2 双频RTK 精度分析
图9 与表7 为双频静态模式下三条基线各方案在E、N、U 方向的定位误差.由图9 可知,五种双频方案在E、N、U 方向均能达到厘米级定位精度.由于剔除GEO 卫星后BDS-2 可用卫星数较少,因此BDS-2 B1I+B2I 与BDS-2 B1I+B3I 定位精度明显低于BDS-3 三种双频方案,其中BDS-2/BDS-3 B1I+B3I定位性能最好.以KIR8-KIRU 基线为例,BDS-2/BDS-3 B1I+B3I 在E、N、U 方向定位精度分别优于4.9 mm、2 mm 和6.3 mm,相对于BDS-3 B1I+B3I 在E、N、U 方向分别提高3.9%,-5%,3%,模糊度固定率提高0.12%.BDS-3 新频点(B1C+B2a)在E、N、U 方向定位精度分别优于4.5 mm、4.5 mm 和5.8 mm,与BDS-3 B1I+B3I 定位精度基本保持一致,体现了BDS-3 卫星系统建设上的一致性与统一性[22].随着基线长度的增加,E、N 方向的定位精度变化较为平缓,U 方向定位精度逐渐下降,说明基线长度对U 方向定位精度影响较大.

表7 双频静态模式下各方案定位精度与模糊度固定率

图9 双频静态模式下各方案E、N、U 方向定位精度
图10 为双频动态模式下BDS-3 B1I+B3I、BDS-3 B1C+B2a 与BDS-2/BDS-3 B1I+B3I 动态模式定位精度,表8 为双频动态模式下三条基线各方案E、N、U 方向定位误差.由表8 可知BDS-2 B1I+B2I 与BDS-2 B1I+B3I 动态定位精度相对于静态模式快速下降,说明卫星数较少时,星座的稳定性与抗干扰性较差.由图10 可知,BDS-3 B1I+B3I、BDS-3 B1C+B2a与BDS-2/BDS-3 B1I+B3I 动态模式下定位精度仍能达到厘米级,其中BDS-2/BDS-3 B1I+B3I 定位解算精度最高,与静态模式解算结果结论一致.以KIR8-KIRU 基线为例,BDS-2/BDS-3 B1I+B3I 在E、N、U 方向定位精度分别优于5.8 mm、2.8 mm 和1.83 cm.BDS-3 B1C+B2a在E、N、U 方向定位精度分别优于6.5 mm、3.4 mm 和2.81 cm,点位定位精度优于3 cm,略低于BDS-2/BDS-3B1I+B3I,相对于BDS-3 B1I+B3I提升6%.BDS-3 的三种双频方案与静态模式解算结果相比,E、N 方向定位精度变化较为平缓,U 方向定位精度下降较为明显,模糊度固定率也略有下降,但固定率都能达到95%以上.

表8 双频动态模式下各方案定位精度与模糊度固定率

图10 双频动态模式下各方案E、N、U 方向定位精度
图11 与图12 分别为KIR8 测站2022 年DOY第2 天双频静态与动态模式下,各方案模糊度固定Ratio 值,图13 与图14 分别为双频静态与动态模式下各方案基线解算残差.由图11~12 可知,前四种单系统解算方案Ratio 值均大于BDS-2/BDS-3 双系统解算Ratio 值,与文献[6]所得结论一致,其中BDS-2 B1I+B2I 与BDS-2B1I+B3I 方案Ratio 值最大,BDS-2/BDS-3 B1I+B3I 方案Ratio 值最小.图中存在两处Ratio 值为0 的情况,第一处BDS-2 B1I+B3I 部分历元Ratio 值为0 是由于探测到周跳无法进行模糊度固定,第二处BDS-2/BDS-3(B1I+B3I)部分历元Ratio值为0 是由于基准站接收机在该时段发生失锁.由于接收机失锁后重新捕获跟踪卫星信号需要花费较长时间,导致第2 160 历元(图中黑线与横轴交点)后BDS-3 B1I+B3I、BDS-3 B1C+B2a 与BDS-2/BDS-3 B1I+B3I 模糊度固定Ratio 值明显下降,对应图13~14 中第2 160 历元后三种双频方案相位残差明显增大.
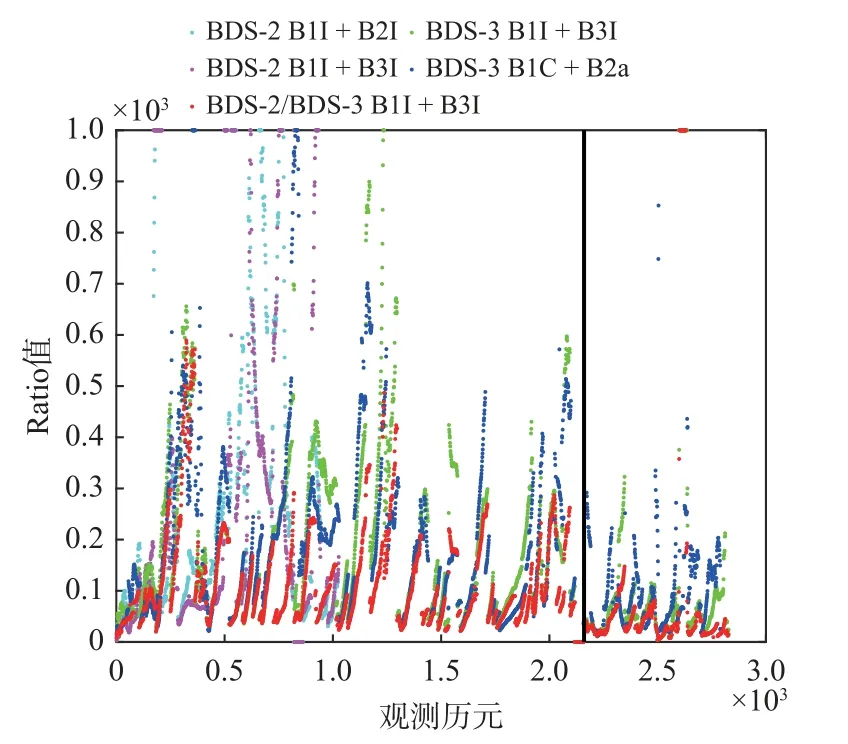
图11 基线KIR8-KIRU 双频静态模式各方案Ratio 值
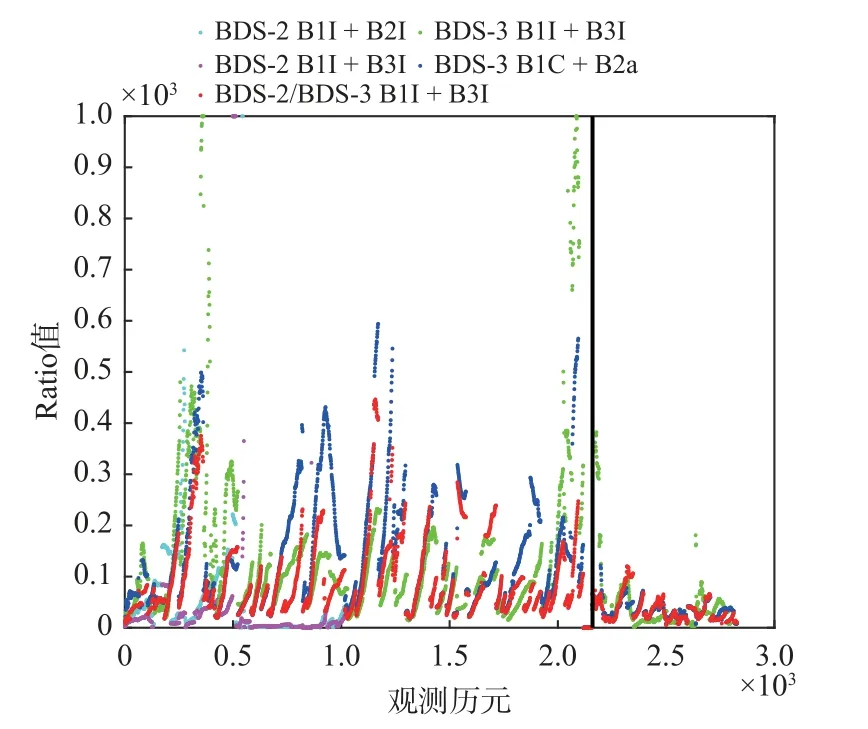
图12 基线KIR8-KIRU 双频动态模式各方案Ratio 值
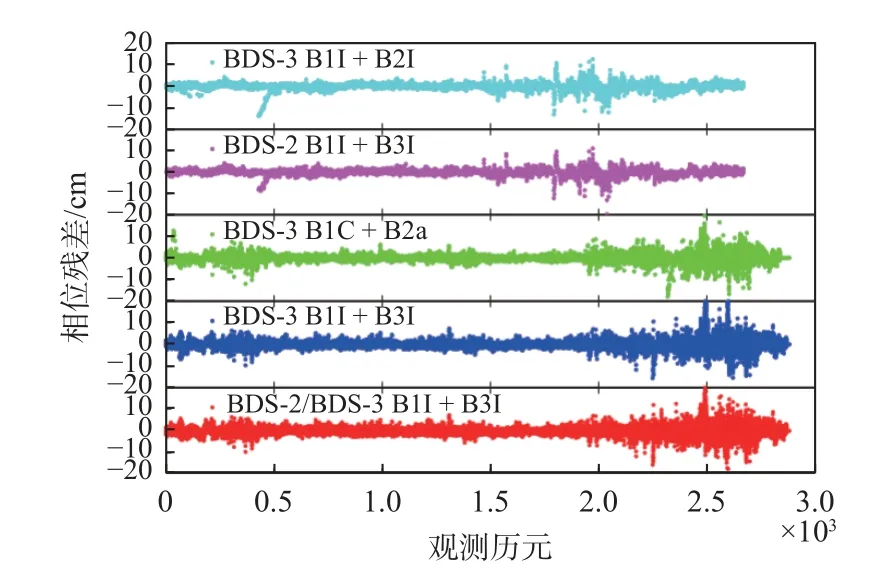
图13 基线KIR8-KIRU 双频静态模式各方案相位残差

图14 基线KIR8-KIRU 双频动态模式各方案相位残差
2.3.3 多频RTK 精度分析
图15 与表9 为BDS-3 B1I+B3I+B1C+B2a+B2b五频非组合方案静态与动态模式下,三条基线在E、N、U 方向的定位误差与模糊度固定率,图16 为模糊度固定Ratio 值.可以看出,三条基线BDS-3 B1I+B3I+B1C+B2a+B2b 五频非组合方案静态与动态定位精度均优于BDS-3 单频与双频非组合方案.以KIR8-KIRU基线为例,静态模式下,BDS-3 B1I+B3I+B1C+B2a+B2b 五频非组合方案在E、N、U 方向定位精度分别优于4.6 mm、4.3 mm 和3.8 mm,模糊度固定率达到99.17%,相比于BDS-3 B1C 和BDS-3 B1C+B2a 点位精度分别提高37%和14%,其中在U 方向提升幅度最大,分别提高59%和34%;在动态模式下,BDS-3 B1I+B3I+B1C+B2a+B2b 五频非组合方案在E、N、U 方向定位精度分别优于7.3 mm、4.3 mm 和1.97 cm,模糊度固定率达到96.79%,相比于BDS-3 B1C 和BDS-3 B1C+B2a 点位精度分别提高18%和25%,U 方向精度分别提高24%和30%.结合图16 与前述分析可知,BDS-3 五频非组合方案相较于单频与双频非组合方案具有更强的稳定性.

表9 五频静态、动态模式下三条基线定位精度与模糊度固定率
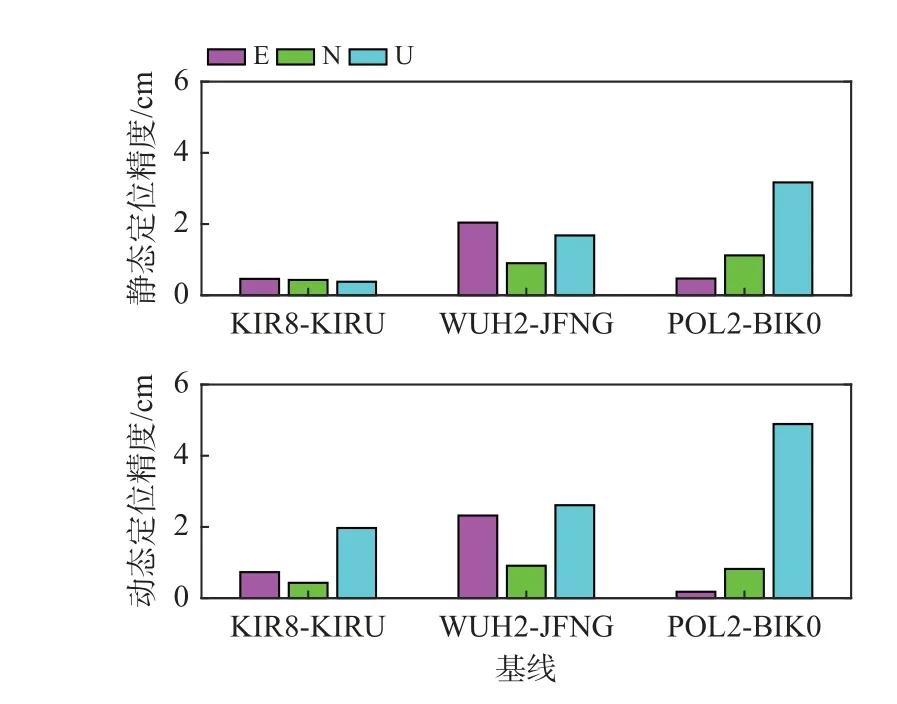
图15 五频静态、动态模式下三条基线E、N、U方向定位精度

图16 基线KIR8-KIRU 五频静态与动态模式Ratio 值
3 结束语
本文利用MGEX 测站数据,分析BDS-3 新频点B1C/B2a 单频与多频RTK 定位性能及BDS-3 新频点与BDS-3/BDS-2 旧频点RTK 定位性能差异,主要结论如下:
1)当基线长度不超过25 km 时,利用BDS-3 新频点B1C/B2a 进行单频RTK 定位,静态与动态模式均能达到厘米级精度,其中静态模式下E、N、U 方向定位精度始终优于2.85 cm、1.67 cm 与4.02 cm;动态模式下E、N、U 方向定位精度始终优于3.03 cm、1.45 cm 与6.49 cm.当基线长度不超过5 km 时,BDS-3 新频点B1C/B2a 与旧频点B1I/B3I 定位精度互差保持在毫米级,定位精度相当.
2)BDS-3 新频点B1C/B2a 双频非组合方案静态与动态模式均能达到厘米级精度,其中静态模式下E、N、U 方向定位精度始终优于1.63 cm、1.33 cm 与3.26 cm;动态模式下E、N、U 方向定位精度始终优于1.92 cm、0.95 cm 与6.71 cm.同时BDS-3 新频点B1C/B2a 与旧频点B1I/B3I 双频定位精度静态模式下相差0.02 mm,动态模式下相差1.79 mm,点位精度互差始终保持在毫米级,定位性能基本相当.
3)BDS-3 B1I+B3I+B1C+B2a+B2b 五频非组合方案静态与动态定位精度均优于BDS-3 单频与双频非组合方案,其在静态模式下E、N、U 方向精度始终优于2.04 cm、1.12 cm 与3.17 cm;动态模式下E、N、U 方向定位精度始终优于2.32 cm、0.91 cm 与4.89 cm.同时BDS-3 五频非组合方案的稳定性优于单频和双频非组合方案.
猜你喜欢
广东通信技术(2023年9期)2023-10-29 07:09:32
军事文摘(2023年4期)2023-04-05 13:57:35
地理空间信息(2022年11期)2022-11-26 05:47:02
智富时代(2019年4期)2019-06-01 07:35:00
测控技术(2018年4期)2018-11-25 09:47:22
测绘学报(2018年10期)2018-10-26 06:12:16
城市勘测(2018年1期)2018-03-15 03:37:02
电信工程技术与标准化(2015年10期)2015-12-22 09:08:10
地理空间信息(2013年4期)2013-09-28 07:42:12
电信工程技术与标准化(2013年4期)2013-08-09 08:22:28