基于DCB 和OSB 产品的GNSS 精密单点定位性能对比与分析
2023-05-29 08:19刘宏辉王潜心余志浩王茂雷刘永梁
全球定位系统 2023年2期
刘宏辉,王潜心,余志浩,王茂雷,刘永梁
(1.中国矿业大学环境与测绘学院,江苏 徐州 221116;2.广州中海达卫星导航技术股份有限公司,广州 510000)
0 引言
目前,以GPS、GLONASS、Galileo 以及北斗卫星导航系统(BDS)为主的全球卫星导航系统(GNSS)趋于成熟,为全球用户提供高精度、高可靠的位置服务.我国的BDS 由于建设阶段性的原因,主要分为北斗二号全球卫星导航系统(BDS-2)以及北斗三号全球卫星导航系统(BDS-3)两部分[1],并且已有研究表明,在BDS-2 和BDS-3 间存在时延偏差问题,不能将两者当成一个系统使用[2].
精密单点定位(PPP)技术以其独立性、无需基站的特点受到国内外众多学者的研究,PPP 模型也由传统的单频或双频单系统发展成多频多系统[3].然而,多频多系统的PPP 技术也带来了一系列的新偏差,如卫星端的差分码偏差(DCB)问题.Wang 等[4]采用IGGDCB 方法估计各GNSS 的卫星端DCB 产品,并验证了其精度与欧洲轨道确定中心(CODE)、德国航空航天中心(DLR)一致.但是,随着越来越多的GNSS 播发三频甚至四频、五频信号[5],DCB 产品使用起来越来越麻烦.因此,国际GNSS 服务(IGS)组织提出绝对偏差(OSB)这一概念,并通过相应的SINEX 格式进行定义、应用和推广[6].OSB 产品可以直接在原始观测值上改正,不需要进行任何变换,在可用性方面具有很大的优势.
中国科学院(CAS)发布的DCB 产品已经被广泛使用,但其新公开的OSB 产品还没有被充分研究.目前,CAS 分别发布了顾及和不顾及天线相位中心(APC)改正的OSB 产品,由于PPP 技术涉及精密星历的使用,本文采用顾及APC 改正的OSB 产品,针对CAS 发布的DCB 和OSB 两种产品分别进行各GNSS 的双频PPP 实验,验证两种产品在不同系统情况下的可用性及一致性,为未来多频多系统OSB 产品的应用提供一定的参考.
1 双频PPP 模型
GNSS 原始伪距和载波相位基本观测方程为[7]
式中:上标 s为G、R、E、C,分别代表GPS、GLONASS、Galileo、BDS,需要注意的是BDS包含了BDS-2 和BDS-3,因此,当s表示BDS 系统时,需要加入一个时延偏差项TDB;下标 r、j为接收机和频率(j=1,2);P和L为伪距和载波相位的原始观测值;为接收机与卫星之间的几何距离;c为光速;dtr和dts分别为接收机钟差和卫星钟差;γj为电离层因子,为f1信号上的斜电离层延迟;Tr为测站天顶的对流层延迟;为频率fj载波对应的波长;为载波模糊度;分别为接收机端和卫星端的非校正伪距硬件延迟(UCD);分别为接收机端和卫星端的非校正相位硬件延迟(UPD);为伪距和载波相位的观测噪声、多路径效应以及其他未模型化误差之和;其他误差项(如天线相位中心改正、地球潮汐改正以及相对论效应等)已经采用相应的模型该正[8].
为方便后续公式的推导,定义下列表达式:
式中:αmn和βmn为双频无电离层组合(IF)因子;和分别为卫星端和接收机端的DCB;和分别为卫星端和接收机端的IF 组合UCD.
本文采用德国地学研究中心(GFZ)发布的精密星历产品计算卫星钟差,产品分别以GPS 的L1/L2、GLONASS 的G1/G2、Galileo 的E1/E5a、BDS 的B1I/B3I 为基准频率生成[9],卫星钟差改正包含了卫星端的,则
式(1)经精密星历改正后,为
1.1 DCB 产品的使用
通常,卫星端的DCB 在一天内是不会变化的,需要使用MGEX(Multi-GNSSExperiment)发布的DCB产品对伪距偏差项改正.但是DCB 代表的是频率间的伪距偏差,因此,不能直接在各频率的伪距观测方程上改正,具体方法为
不难看出,DCB 产品的使用需要搭配IF 组合因子,在未来多频多系统的应用背景下,传统的DCB改正方法将会十分复杂困难.
1.2 OSB 产品的使用
与DCB 产品不同,OSB 产品包含了每个频率上的绝对伪距偏差.CAS 在产品服务端通过约束基准码进行DCB 的估计[10],从而得到最终的OSB 产品:
可以看出,OSB 产品是在DCB 产品估计的基础上增加一个卫星端IF 组合UCD 等于0 的约束求出的,在改正的时候是直接在伪距观测方程上减去相应的.
1.3 双频IF 模型
无论是DCB 还是OSB 产品,原理上都是为了对原始伪距观测方程的伪距硬件延迟项改正,改正后的式(4)可表示为
IF 组合模型是最经典的PPP 模型(式(8)),其特点是通过IF 组合因子消除一阶电离层延迟的影响,具有模型简单易实现[11]、计算效率高等优点.
2 实验数据及处理策略
为了检验DCB 和OSB 产品在双频IF 模型中的应用,本次实验选取50 个MGEX 测站采集的10 d的观测数据,分别进行GPS、GLONASS、Galileo 以及BDS 四个系统的实验.观测数据的采样间隔为30 s,所有测站均能接收到各GNSS 的基准频率,测站的地理位置分布图如图1 所示.
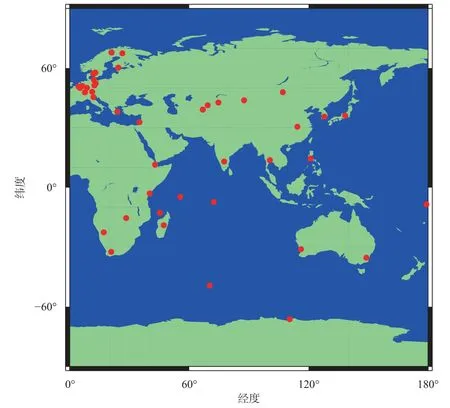
图1 50 个MGEX 测站地理位置分布图
表1 总结了DCB 和OSB 两种产品的实验策略,不同之处在于对卫星伪距偏差的改正.其中卫星和接收机的天线改正采用IGS 发布的atx 文件[12],对于缺少的Galileo 和BDS 接收机天线改正,采用相应的GPS 第一、二频代替.以IGS 中心提供的SINEX 文件中坐标为坐标真值,当测站的东(E)、北(N)、天顶(U)三个方向的绝对定位误差连续60 个历元(30cm)均小于0.1 m 时判定为收敛[13].由于观测残差包括测量噪声和建模误差,因此,可以通过输出的观测残差是否遵循零均值高斯分布来评估PPP 模型,同时检测模型误差是否完全改正.图2 表示采用两种不同产品策略时,MET3 测站上IF 模型计算的各GNSS 的伪距残差分布,不同的颜色表示不同的卫星.可以看出无论是采用传统的DCB 产品还是采用OSB 产品改正伪距偏差,各GNSS 的伪距残差均在0 值附近,初步说明DCB 和OSB 产品在改正伪距偏差上的一致性和正确性.
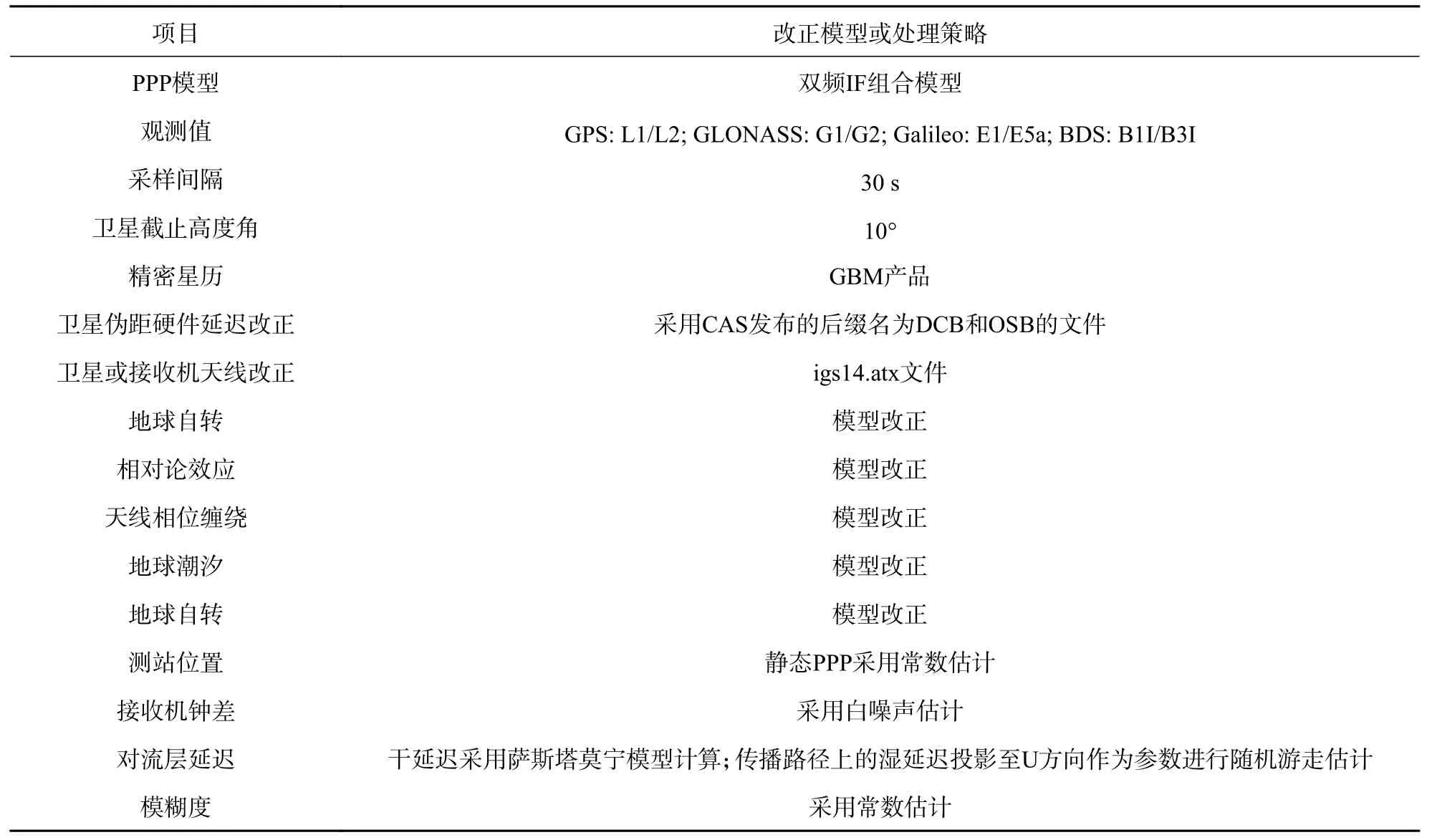
表1 实验处理策略
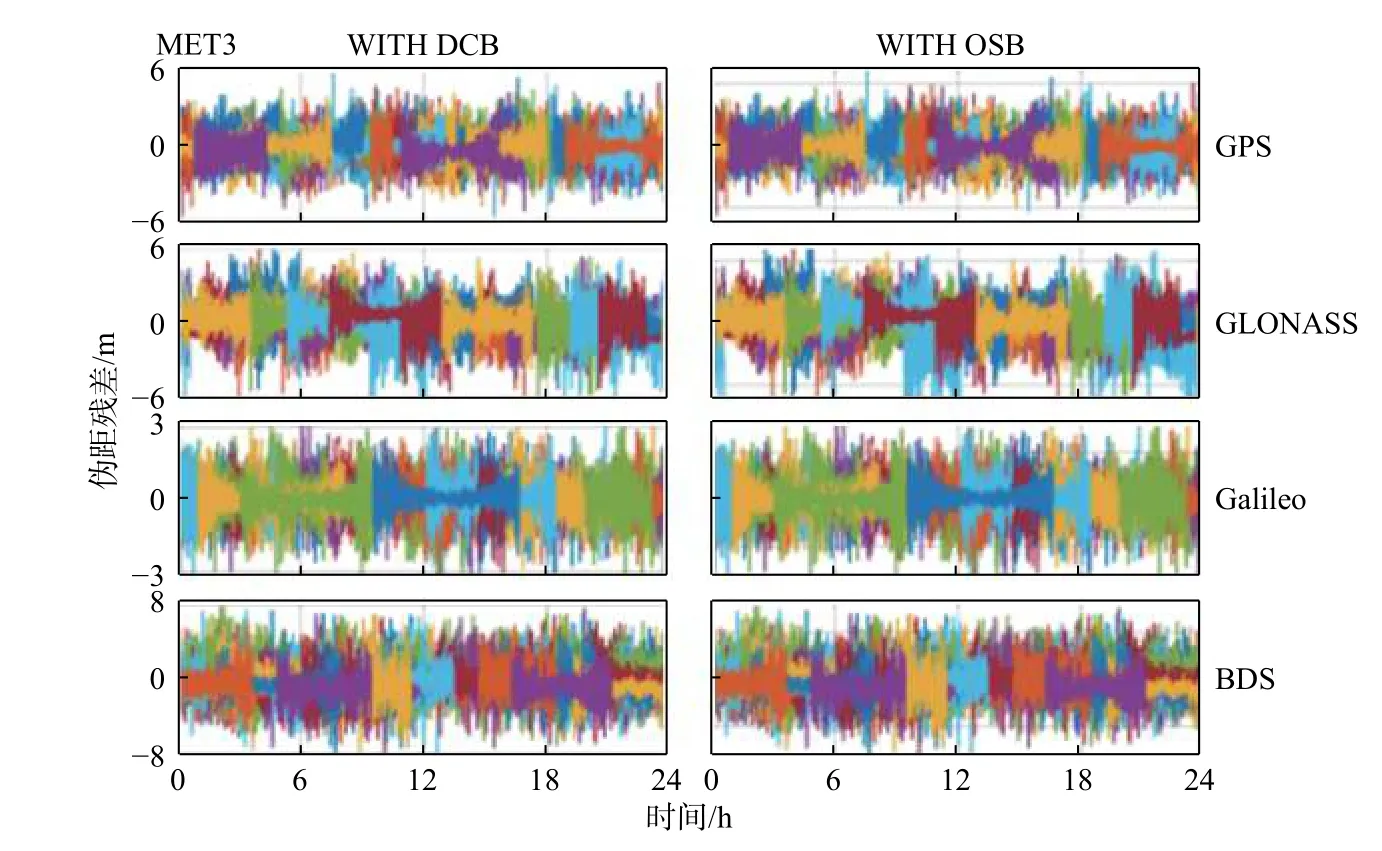
图2 采用DCB 和OSB 产品时MET3 测站的伪距残差序列图
3 实验结果和分析
本文分别用CAS 发布的DCB 和OSB 产品进行四种方案的双频IF 实验:GPS、GLONASS、Galileo以及BDS,并以定位精度的均方根误差(RMSE)和收敛时间来评定PPP 模型的性能.图3 显示采用不同产品时,MET3 测站在年积日第182 天的四种方案PPP 模型静态定位误差曲线图,蓝色和红色曲线分别表示采用DCB 产品和OSB 产品.可以看出,无论是用DCB 产品还是OSB 产品,各方案的定位误差曲线几乎重合.
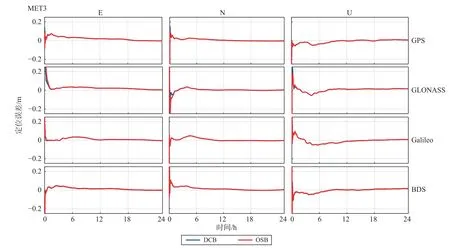
图3 MET3 测站上不同产品改正方案的PPP 定位误差序列图(年积日第180 天)
为了进一步科学全面地对比分析两种产品对PPP 模型的影响,本文统计了50 个MGEX 测站10 d平均的三维收敛时间和RMSE 值,如图4 所示.由于实验选取的测站分布范围广,表2 阐明了收敛时间和RMSE 值的中位数.由表2 和图4 可知,DCB 和OSB 两种产品对GPS 和GLONASS 方案的定位性能略有差别但差异不大,对Galileo 和BDS 方案的效果是一样的.采用OSB 产品时,GPS 方案的定位性能最好,三维定位精度能达到0.92cm、0.63cm、1.57cm,总收敛时间为15.50min;GLONASS 方案的定位精度比GPS 稍微差点,但是收敛时间是四个方案中最差的,为38.08min;Galileo 方案的定位性能与BDS 在同一水平内,但比BDS 方案略好;得益于卫星数的提升,BDS 方案在23.10min 时即可达到收敛,收敛后的三维定位精度为1.53cm、0.98cm 和2.50cm.
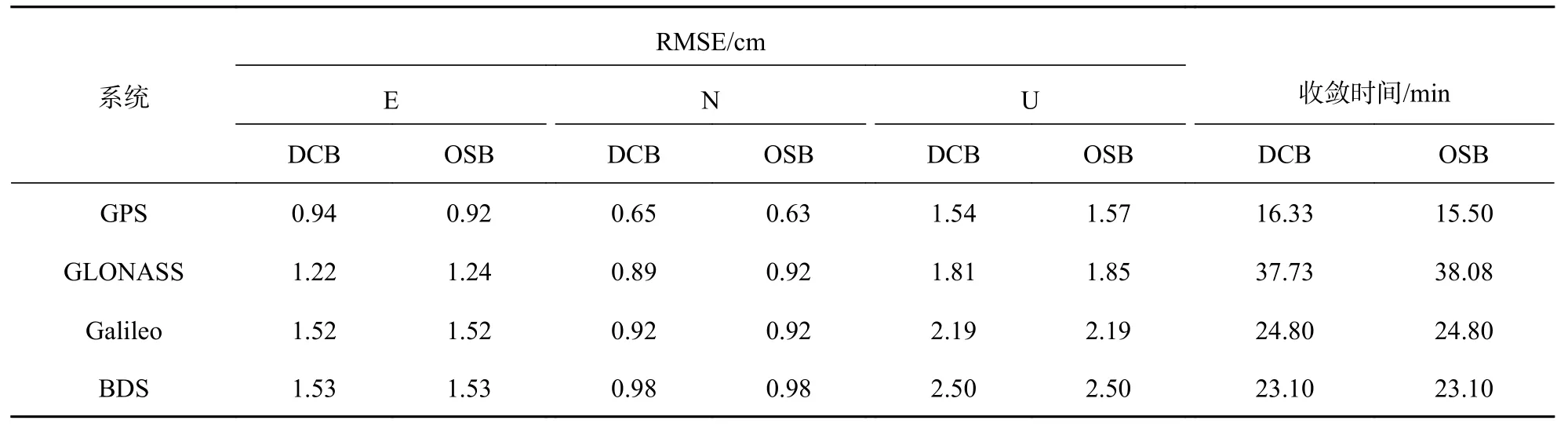
表2 不同产品方案下三维定位RMSE 值和收敛时间统计表
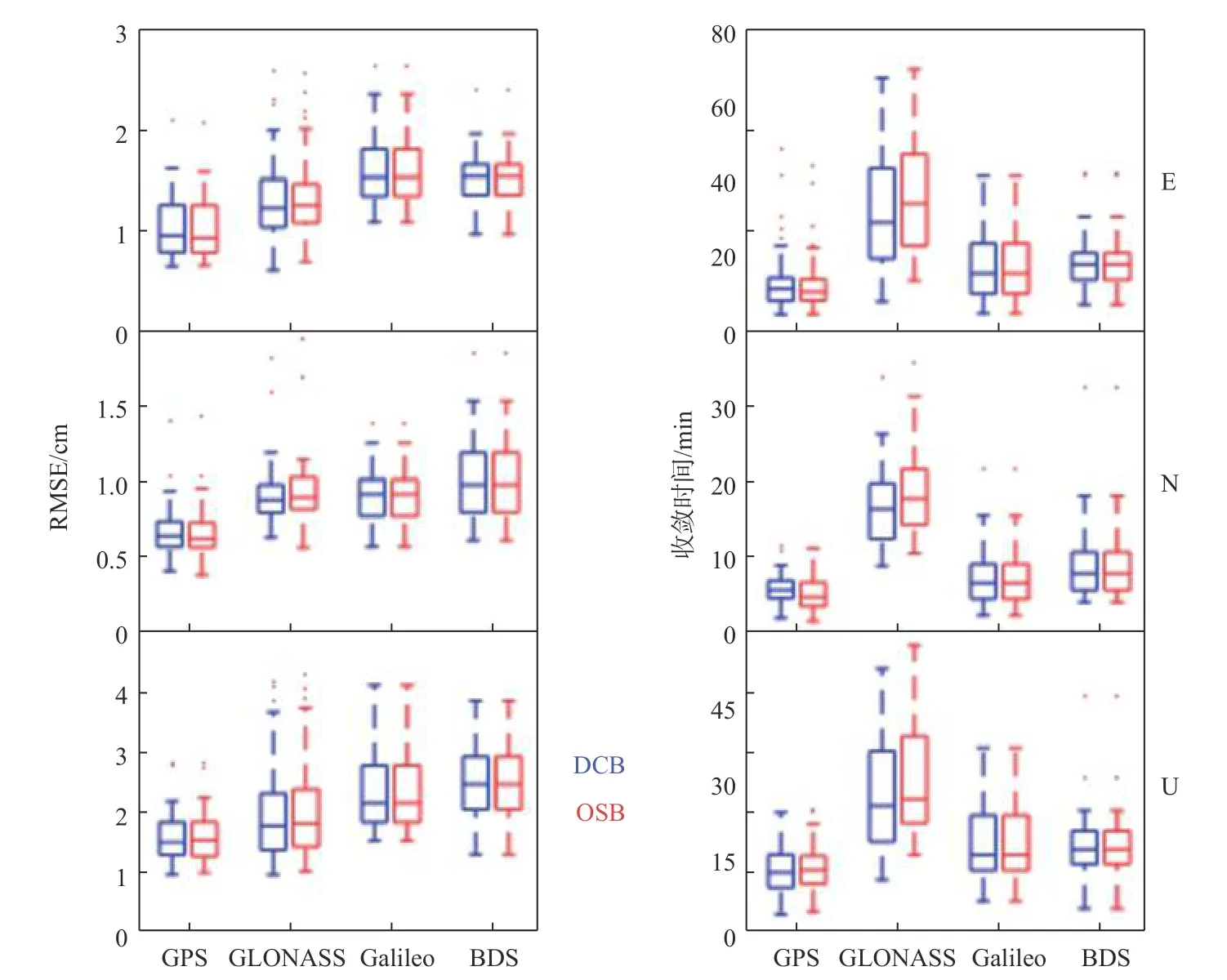
图4 不同产品方案下三维收敛时间和定位RMSE 值箱线图
4 结论
为了应对未来多频多模的PPP 技术,本文在原始观测方程的基础上,分别推导出适用于CAS 发布的DCB 产品和OSB 产品的双频IF 模型,并采用50 个MGEX 测站观测的10 d 数据分别对不同的方案验证模型的可用性,即GPS、GLONASS、Galileo、BDS 四种方案.
实验结果表明,DCB 和OSB 两种产品下GPS或GLONASS 方案的定位精度差异可以忽略不计;使用OSB 产品能一定程度上减少GPS 方案的收敛时间,但是却稍微延长了GLONASS 方案的收敛效果,这可能与GLONASS 系统的频分多址(FDMA)信号调制方法有关.此外,两种产品下Galileo 和BDS方案的定位性能是一样的.综合使用方法和对各系统的定位影响,以后PPP 模型的处理策略中,完全可以采用OSB 产品代替传统的DCB 产品.采用OSB 产品时,GPS 方案的定位性能最好,三维定位精度能达到0.92cm、0.63cm、1.57cm,总收敛时间为15.50cm;GLONASS 方案的定位精度比GPS 稍微差点,但是收敛时间是四个方案中最差的;Galileo 方案的定位性能与BDS 在同一水平内,但比BDS 方案略好.
本文对OSB 产品的研究仅限于伪距层面,并没有涉及到相位OSB 产品在模糊度固定方面的应用.因此在后续的研究中,我们将侧重于相位OSB 产品的生成策略及模糊度固定方面的应用.
猜你喜欢
地理空间信息(2022年11期)2022-11-26
测控技术(2018年6期)2018-11-25
电子制作(2018年19期)2018-11-14
测绘学报(2018年10期)2018-10-26
城市勘测(2018年1期)2018-03-15
测绘科学与工程(2017年3期)2017-08-16
测绘通报(2016年12期)2017-01-06
电子制作(2016年1期)2016-11-07
系统工程与电子技术(2016年4期)2016-08-24
导航定位学报(2015年2期)2015-06-05