基于省级区域地基增强系统的北斗三号系统卫星数据评估分析
2023-05-29 08:19:48魏以宽厉芳婷唐晓霏赵鹏
全球定位系统 2023年2期
魏以宽,厉芳婷,唐晓霏,赵鹏
(湖北省测绘工程院,武汉 430074)
0 引言
北斗卫星导航系统(BDS)是我国独立发展、自主运行的全球卫星导航系统(GNSS),能够提供高精度、高可靠的导航、定位和授时(PNT)服务,是我国重要的空间基础设施[1].2020 年7月31 日,我国北斗三号全球卫星导航系统(BDS-3)正式开通,表明我国BDS 迈出了一大步,意味着GNSS 的定位精度、可靠性等方面将更上一层楼[2].
北斗地基增强系统是以BDS 为主兼容其他GNSS的地基增强系统(GBAS),采用50~300 km 的地面基准站间距向用户提供厘米级至米级精密导航定位和大众终端辅助增强服务[1].随着BDS-3 的正式建成,BDS 的定位精度和服务能力获得了巨大提升,本文以省级区域地基增强系统为例,提出在多个不同观测条件的站点进行数据质量分析和GNSS 静态数据处理实证试验,对BDS-3 卫星数据进行了评估分析,验证BDS-3 对于地基增强基站数据质量以及定位精度的提升情况.
1 数据评估和分析方法
1.1 数据完整率评估
数据完整率反映了观测时段内接收机接收到GNSS 各系统数据的完整性,数据完整率定义为观测时间段内接收机观测到的卫星的实际历元数据量与理论历元数据量的比值[2],其计算公式为
式中:R0为数据完整率;H0为观测时间段内接收机观测到的卫星的实际历元数据量;E0为理论历元数量.
1.2 伪距多路径误差评估
多路径效应是指卫星信号经过反射物反射进入天线后与直接来自卫星的信号产生干涉,从而使观测值偏离真值.常用的计算多路径延迟模型为式中:MP1和MP2为伪距多路径误差;f1和f2为载波的频率;P1/P2和Φ1/Φ2为两个频率上的伪距和以周为单位的载波相位观测值;NP1和NP2为两个组合中的模糊度参数.通常,在连续观测无周跳的情况下组合模糊度不变,因此对多个历元取平均作为真值,代入式(2)即可得到两个频率上的伪距多路径误差[3].
1.3 零基线测试分析方法
零基线是指两个接收机通过功率分配器(简称功分器)共用一个天线,即两个接收机天线之间的基线长度为零[4-7].
功分器将同一天线输出的信号分成多路信号送到接收机,由于功分器输出的多路信号有着对称性,分配的多路信号功率相同、相位相同.零基线测试能够较真实地反映接收机的质量水平[8],静态基线向量长度在1 mm 以内则认为接收机内部噪声水平满足检测要求[9].
但是静态数据的观测质量对数据处理有较大影响,本文提出一种将观测数据分类后分别进行零基线测试的方法,并结合零基线结果合理推测卫星数据质量,是一种实现更全面的零基线测试方法.具体步骤如下:
1)按图1 所示方式连接功分器,打开接收机开始进行静态观测,并记录24 h 静态数据.

图1 功分器连接示意图
2)将每一份观测数据预处理为GPS 观测值、北斗二号卫星导航系统(BDS-2)观测值、BDS-3 观测值、BDS 组合观测值(后称BDS-combine).
3)使用GAMIT 数据处理软件分别对GPS、BDS-2、BDS-3、BDS-combine 数据进行基线解算,计算获得任意两台接收机之间的基线长度.
4)统计和比较各组基线长度,其基线长度越接近0 值,则表示该组观测数据的内部噪声值越低.
5)统计相同测站的多条零基线平均值,结合观测质量分析结果横向对比不同测站间的零基线平均值,分析观测数据质量下降对零基线结果产生的影响.
1.4 精密单点定位(PPP)分析方法
不同于差分定位,PPP 无需基准站网支持,作业方式灵活简单,可在全球范围内提供瞬时厘米级精度定位服务,极大地降低了作业成本[10-12].PPP 技术也有自身的瓶颈,即较长的收敛时间和浮点模糊度解[13].
对于从测站r 到卫星s 的双频GNSS 数据,其以长度为单位,对应于第i(i=1,2)频率的伪距和载波相位原始观测方程为
对流层延迟可分为干分量和湿分量.PPP 中对流层延迟改正是将模型作为先验值,将残余的对流层延迟估计为分段常数或游走随机噪声,并通过投影函数投影至信号传播方向.对流层延迟可表示为
式中:ZTDdry/wet为天顶对流层的干/湿分量;Mdry/wet为其对应的干/湿投影函数[14].
该方法采用PRIDE PPP-AR 软件,分别测试全系统组合解、GPS 解、BDS-2 解、BDS-3 解、BDScombine 解.处理策略如表1 所示.
已有研究证明用于模糊度固定的备选模糊度越多,部分模糊度固定策略的成功率越高[15-17],本实验中选取多个不同观测环境的测站,观测质量由好至差分别开展PPP 性能测试,以验证观测质量下降的情况下各卫星系统的精度表现.
2 研究区域及数据预处理
2.1 研究区概况
本文选取湖北省省级北斗地基增强系统为研究区域.截止2022 年湖北省北斗地基增强系统已建成均匀分布湖北省范围的91 个基准站,基线平均长度54 km,基准站分布范围内有山地、丘陵、平原等多种地形地貌.基准站均布设2~3 台不同品牌型号的GNSS 接收机(简称接收机A、B、C),公用天线接收到的卫星信号使用功分器分配至多台接收机,实现多套数据互相验证、互相备份的目的.所有基准站均已连续观测10 a 以上,具有良好的可靠性和稳定性.
2.2 测站情况
本次试验选择了湖北省内三个典型站点作为对照组,其中CD 站点观测条件优良,无明显遮挡.JF 和MC 站点的观测条件较为复杂,数据质量差,JF 站点整体被高大树木包围,尤其西北方向有非常明显遮挡,40°以下高度角基本无法收星;MC 站点四周均有较明显遮挡,40°以下高度角基本无法收星.
对24 h 内各个卫星导航系统每小时整点采样可同步观测到的卫星数量进行统计,平均值如表2 所示,卫星星空图如图2 所示.
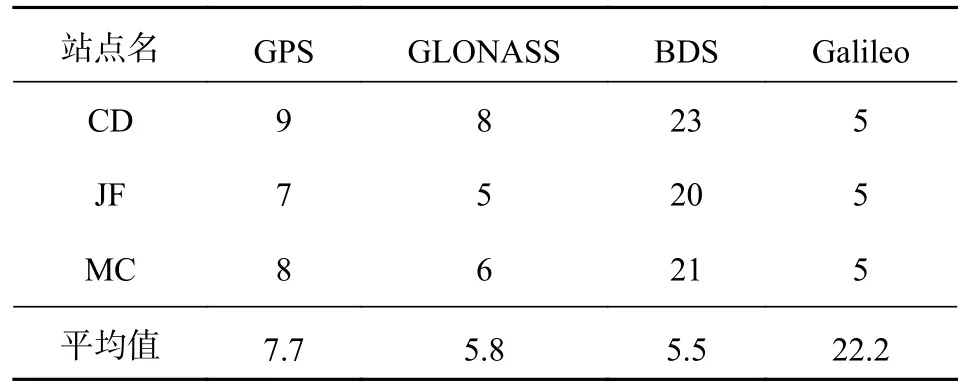
表2 每小时可同步观测卫星数量统计
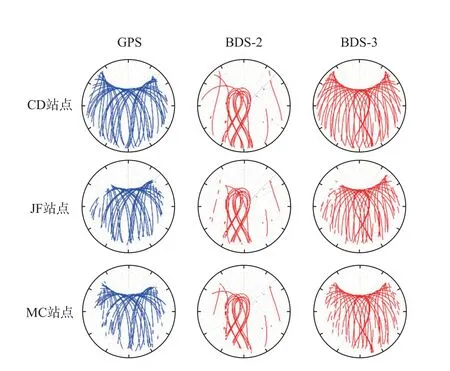
图2 CD、JF、MC 站点卫星星空图
2.3 数据预处理
本文随机选择了2022 年5 月1 日年积日第121 d 的24 h 观测数据为原始数据,经过数据预处理,统一了不同接收机的头文件格式,将采样率统一为30 s.
对1 d 数据进行切割,分为24 h、12 h、6 h、3 h、1 h五个对照组.
对1d 数据按GPS、BDS-2、BDS-3、BDS-combine进行分离.
同时使用IGS 站点联测CD 和MC 站点7 d,进行基线解算后使用GLOBK 平差获得站点的精确坐标,取7 d 平均值为外符合精度统计的标准值.
3 数据处理及分析
本次试验在每个站点均安装了3 台接收机,其中1 台为国外品牌接收机A,2 台分别为国产品牌接收机B 和C.
现阶段可以接收到的卫星信号主要来自于全球四大导航系统GPS、GLONASS、Galileo、BDS,中国部分地区亦可以捕获来自日本的区域导航准天顶卫星系统(QZSS)的卫星信号.表3 为各接收机能够接收到的卫星系统对比情况.

表3 各接收机卫星系统接收情况统计
Galileo 卫星在亚太地区接收到的卫星数量有限,接收机对GLONASS 的频分多址支持不佳,50%左右的观测值仅有单频GLONASS 数据.故本次试验主要选择BDS-2、BDS-3 作为试验对象,GPS 数据作为对照比较组.
3.1 数据完整率分析
四大导航系统的历元数据如表4 所示,HAV>10°表示高于10°高度角的实际历元数据量,EXP>10°表示高于10°高度角的理论历元数据量,ratio 表示该接收机的数据完整率.在站点CD 上接收机B、C 数据完整率表现较好,而接收机A 数据完整率较差.在站点JF 和MC 由于遮挡严重,数据完整率表现均不理想.

表4 接收机数据完整率统计
在站点MC 接收机A 数据完整率达到了85%,明显高于接收机B、C,接收机A 仅接收GPS 和GLONASS卫星数据,无法接收BDS 数据,在统计理论历元数量(EXP>10°)时大幅减少,导致数据完整率较高.
3.2 多路径误差统计与分析
三个站点各品牌接收机数据的多路径误差如表5所示,多路径结果真实反映了观测站点不同的观测环境导致的误差情况.站点CD 的各频点多路径误差大部分低于40 mm,而站点JF 和MC 大部分多路径误差高于50 mm.

表5 各品牌接收机各频点多路径误差结果 mm
值得注意的是,接收机C 在BDS 中接收到了频点MP1,且频点MP1 和MP5 的多径效应误差明显偏大,这是由于这两个频点上调制了新频点信号B1C和B2a 的,而接收机对新频点的支持较差,导致引起的多路径误差偏大.
3.3 观测值高度角统计
对24 h 观测值中的各高度角区间所包含的频段观测值数量进行统计,结果如图3 所示.三个站点上BDS 卫星观测值总量均超过GPS 卫星,相较GPS观测值总量提升分别达到213.38%、225.64%、214.50%.
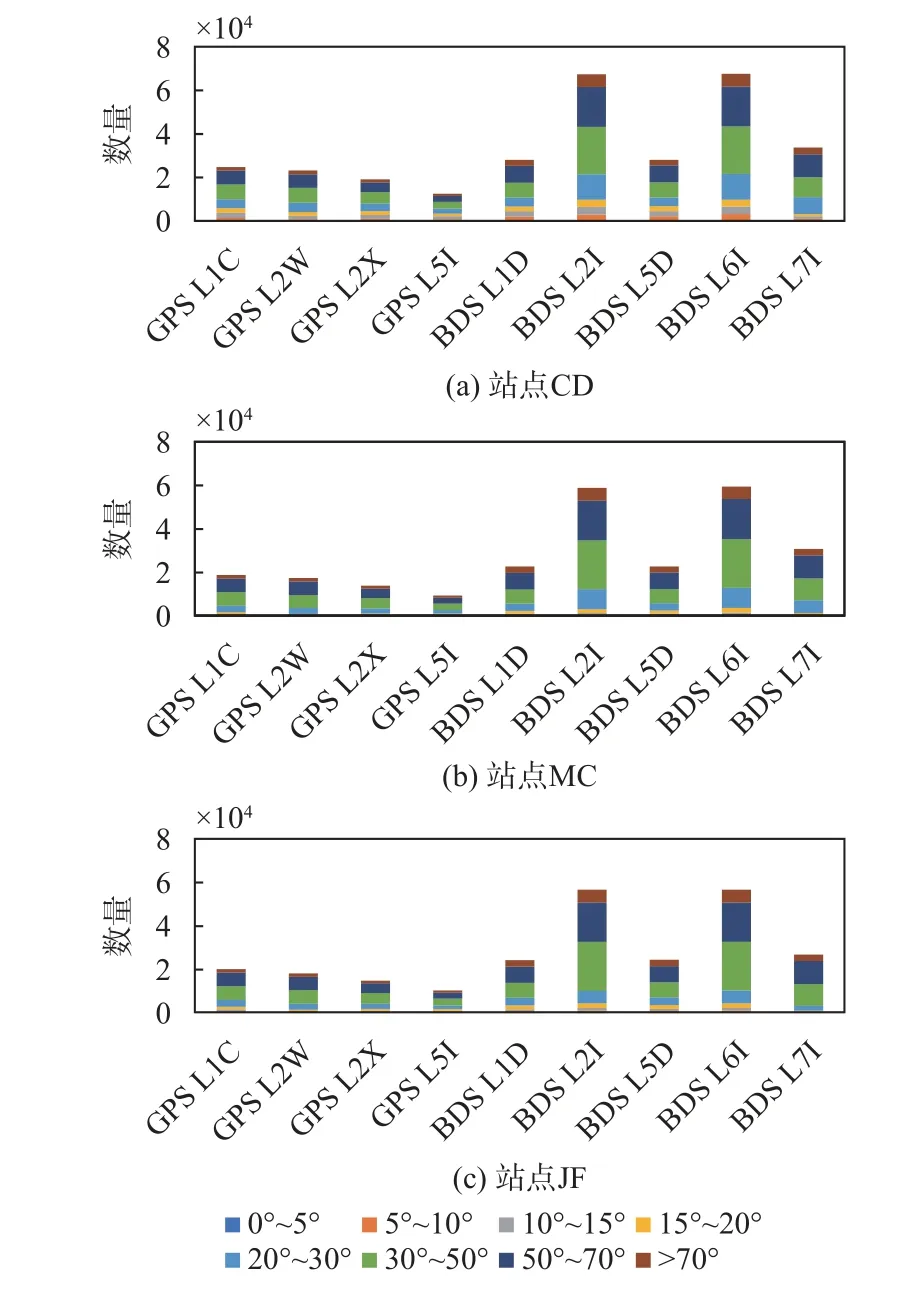
图3 三个站点各高度角区间包含的频段观测值数量统计图
三个站点上BDSL2I、BDSL6I 频段观测值总数量均为最高,GPS 中四个频段高度角高于50°的观测值占总数量的29.9%~45.3%,BDS 中六个频段高度角高于50°的观测值占总数量的33.8%~51.0%.
需要注意的是,在观测质量较好的站点CD,观测值总量上升导致50°以上高度角的观测值百分比下降达到33.8%~40.7%.同理可知,站点MC 的观测值总量下降主要是由于低高度角遮挡引起,而50%以上的高度角观测基本不受影响,表现出50°以上高度角的观测值百分比上升达到42%~51%.
从图3 还可以看出,站点CD 的数据完整性最高,多路径误差最小,是观测质量最好的站点.站点JF 和MC 的数据完整性接近,而站点MC 的多路径误差要明显高于JF,所以认为站点JF 的观测环境优于MC.
4 实验及结果
4.1 零基线相对定位结果
实验中每个站点均使用三台接收机,形成三条同步观测零基线,将同一站点的三条同步基线取平均值记为该站点的零基线均值,各组数据的同步观测基线椭球距离平均值统计如图4 所示.

图4 三个站点同步基线椭球距离平均值统计图
从图4 可以看出,使用24 h 数据GPS 解仅能保证站点CD 达到1 mm 以内的基线长度,满足1 mm的检测要求,其他场景下平均基线长度均超过了2 mm.说明GPS 卫星在遮挡严重的复杂环境下,对基线处理有较大的影响.
BDS-2 在观测质量最差的站点MC 平均基线长度达到了1.5 mm.
BDS-3 解和BDS-2/BDS-3 组合的BDS-combine解在CD、JF、MC三个测站场景下均能保持基线距离在1 mm 以下.
BDS-combine 解使用的多为接收机B、C 形成的同步基线,相对来说新接收机的内部噪声抑制得更好,导致加入BDS-3 数据的基线精度会有相应的提升,在本试验中表现出更好的定位性能.
4.2 PPP 结果
本次实验的PPP 测试使用了站点CD 和MC 作为对照组,即最好的和最差的观测质量数据,PPP 观测值中的备选模糊度越多固定的几率越大,而观测到的卫星系统和观测时间会直接影响到模糊度固定情况.试验测试了站点CD 和MC 的PPP 性能,并与站点的外符合标准值坐标对比,站点PPP 外符合误差统计如图5 所示.

图5 站点CD 和MC 站PPP 外符合误差统计图
由于BDS-2 编号C01-C05、C18 卫星的轨道精度较差,本测试中对这些卫星进行降权处理.可以看出在:观测环境良好的站点CD,全系统组合解、GPS 解、BDS-3 解和BDS-combine 解在所有对照组外符合误差均在5 cm 以内,表现出非常稳定的外符合精度;而随着观测时间的减少,观测时长低于3 h的BDS-2 解的误差逐步上升.
而在观测环境不佳的站点MC,全系统组合解和GPS 解仍表现出非常好的PPP 精度.6 h 的BDS-2 解的宽巷固定率仅为54.8%窄巷固定率为13.0%,低于6 h 的PPP 无法收敛到较好的误差精度.3 h 以内,BDS-3 解依然能保持与GPS 相当的外符合精度.而在加入BDS-3 卫星后的BDS-combine 解,1 h 观测时长下,相较BDS-2 精度有显著提升,但略低于BDS-3 解.
5 讨论与分析
本文通过数据质量统计,分析三个典型站点的数据完整性、多路径效应,评定站点的观测质量.统计结果显示BDS-3 播发的B2b 和B3 信号多路径误差平均值较低,分析认为是BDS-3 卫星空间分布结构更为优秀.根据第3 节的同步观测卫星统计表和星空图所示所有测站上,24 h 内按每小时取样,三个站点的收星平均值为BDS 为22.2,GPS 为7.7,Galileo为5.5,可见BDS 可以接收到更多的卫星.同时有更多在高度角50°以上的观测量,避免了低高度角的遮挡环境,在复杂观测环境下也能获得较好的观测质量.
整体来说,使用24 h 观测数据的情况下,4 套卫星系统观测值组合均可以获得较好的基线结果,验证了零基线的实际情况.零基线试验大多用于检测接收机内部噪声情况,本文假定同品牌同型号接收机内部噪声水平近似,测试了3 种不同观测条件下零基线情况,横向对比结果显示BDS-3 及BDS-combine 零基线平均值优于单GPS.在亚太地区使用单BDS 进行GNSS 静态数据处理的精度已经达到了GPS 相当水平,甚至部分指标更优.
通过PPP 试验对两个测站进行了对比测试,结果显示在高质量的观测数据下,各卫星观测组合的区别很小,而BDS-2 解由于排除了轨道精度不足的6 颗卫星,在观测时长减少至3 h 以内后可用的剩余观测值和可选模糊度大幅减少,导致单点精度无法收敛.在恶劣的观测条件下,这个情况更加严重.而加入了BDS-3 卫星后得到明显改善,3 h 的观测数据依然可以保持和GPS 相当的单点定位精度.
6 结束语
本文开展了多项数据测试和试验验证,为提升省级地基增强系统维护工作质量,对复杂环境的基准站观测数据进行具体分析,评估站点观测环境指标,为后续的维护工作提供了依据.同时验证了BDS-3 的建成对区域地基增强系统的高精度定位有了极大地性能提升,在复杂的观测条件下也可以通过观测到更多的高仰角卫星、更多的卫星信号频段获得更多的有效观测值.
本文从不同接收机内部噪声、环境影响观测质量以及观测质量变化对双差/非差定位性能进行了分析,具有一定的参考意义,后续可利用本文提出的方法进行长时序的分析.
猜你喜欢
北京航空航天大学学报(2021年9期)2021-11-02 08:24:16
中国惯性技术学报(2020年2期)2020-07-24 08:41:02
中国交通信息化(2019年2期)2019-03-25 03:20:16
测控技术(2018年6期)2018-11-25 09:50:18
电子制作(2018年19期)2018-11-14 02:36:40
World Journal of Integrated Traditional and Western Medicine(2017年3期)2017-03-10 18:18:16
电子制作(2016年1期)2016-11-07 08:42:41
系统工程与电子技术(2016年4期)2016-08-24 07:46:04
World Journal of Integrated Traditional and Western Medicine(2016年4期)2016-03-28 02:08:04
World Journal of Integrated Traditional and Western Medicine(2016年2期)2016-03-14 23:06:38