
基于对水速度的LDV/SINS水平阻尼方法
2023-04-28 05:54程广新于旭东董壮壮田凯文
导航定位学报 2023年2期
程广新,于旭东,董壮壮,田凯文,李 鼎,张 斌
基于对水速度的LDV/SINS水平阻尼方法
程广新,于旭东,董壮壮,田凯文,李 鼎,张 斌
(国防科技大学 前沿交叉学科学院,长沙 410073)
针对当前捷联惯性导航系统外阻尼技术依赖对地绝对速度的问题,提出基于对水速度的激光多普勒测速仪(LDV)/捷联惯性导航系统(SINS)水平阻尼方法:利用激光多普勒测速仪输出的对水速度作为捷联惯性导航系统的外参考速度;并使用延迟状态卡尔曼滤波算法,以速度的变化量作为观测量,屏蔽外速度常值误差对系统的影响,提高导航的精度。半物理仿真结果表明,该方法能够实现捷联惯性导航系统误差的有效阻尼;相比于传统阻尼方法,使用该方法进行阻尼,位置导航精度可提高84.05%,速度导航精度可提高84.89%。
相对速度阻尼;激光多普勒测速仪(LDV);水速;惯性导航
0 引言
捷联惯性导航系统(strap-down inertial navigation system,SINS)具有自主性强、隐蔽性好、短时精度高等优点,在导航领域得到了广泛应用[1-3]。然而,由于各种误差源的存在,惯导系统在解算过程中会产生3种周期性振荡误差,严重影响了导航的精度。为了抑制系统的周期性振荡误差,通常要在导航系统中加入阻尼,以提高惯导系统的导航精度[4]。加入阻尼的方式一般分为内阻尼方式和外阻尼方式:内阻尼方式通常是在无参考速度时,在解算回路中引入水平指令角速度进行阻尼,抑制系统的周期振荡;外阻尼方式是当有外参考速度时,惯导系统利用外速度作为载体的补偿通道进行阻尼[5]。
激光多普勒测速技术是伴随着激光器的诞生而产生的一种激光测量技术,可以用来测量物体的运动速度、加速度及位移等,目前已经广泛应用于计量、汽车、航天、航空等领域[6]。激光多普勒测速仪(laser Doppler velocimetry,LDV)是一种数据更新频率快的非接触式速度测量仪器,测量过程对测量目标无干扰。光路中的参数一经确定,多普勒频率与速度的关系就被精确确定,测速精度高,隐蔽性好[7]。将LDV提供的速度作为外参考速度对SINS进行外阻尼,能够抑制惯导系统的周期振荡,同时充分发挥惯性导航系统的自主性和隐蔽性。文献[8-9]提出了将激光多普勒测速仪应用于车载导航系统,分别设计了多点分层差动LDV和基于Janus配置的参考光束型LDV测量小车,并分析其相对于地面的真实速度,阐明了2种激光多普勒测速系统用于车载自主导航系统的可行性和潜力。文献[10]提出用激光多普勒测速仪于捷联惯导进行组合,基于分光再利用的思想,设计了新型光路结构的激光多普勒测速仪,详细讨论了激光多普勒测速仪与捷联惯导组合进行航迹推算的过程,并将其用于车载惯性导航系统,大大提高了导航精度。文献[11-13]在分析激光多普勒测速技术研究现状的基础上,对二维激光多普勒测速仪和三维激光多普测速仪进行了深入研究,提出了三维LDV标定法方法,实现了三维多普勒测速仪的工程化。上述文献中LDV都应用于陆用惯导系统,LDV输出的是对地的绝对速度;而将LDV应用于水用惯导系统时,LDV输出的是对水的相对速度。考虑到水流速度短时间稳定的特征,如果不除掉水流速度,直接使用LDV输出的速度对惯导系统进行阻尼时,就会给惯导系统引入外速度常值误差,影响导航精度,严重时导致系统发散。
对于外速度具有常值误差进行阻尼时,文献[14]基于现代控制理论,利用卡尔曼滤波的反馈校正技术,在具有外速度常值误差的假设下,实现了惯导的水平阻尼。文献[15]提出以外速变化作为外部输入,屏蔽了常值外速误差对系统的影响。在外速变化作为外部输入的基础上,文献[16]提出了一种基于双滤波器的外阻尼导航算法。第一个滤波器利用组合导航算法对外部参考速度进行平滑,得到相应的误差状态估计;第二个滤波器利用平滑后的外参考速度,以速度变化量作为观测量进行卡尔曼滤波,得到相应的状态估计;最后对2个滤波器的估计结果进行信息融合,消除外速度常值误差对SINS的整体导航精度的影响。文献[17]提出一种基于延时状态的自适应滤波方法,构造了包含延时状态的量测方程,消除了外速度的常值误差,实现系统误差的有效阻尼。
基于陆用LDV/SINS对地速度组合导航技术和外速度常值误差的研究,本文提出利用水下LDV输出的相对于水的速度作为SINS的外参考速度进行外速度水平阻尼,结合水流速度的短期稳定性,基于延迟状态滤波的方法,实现对水相对速度阻尼。水用LDV/SINS组合导航应用示意图如图1所示。
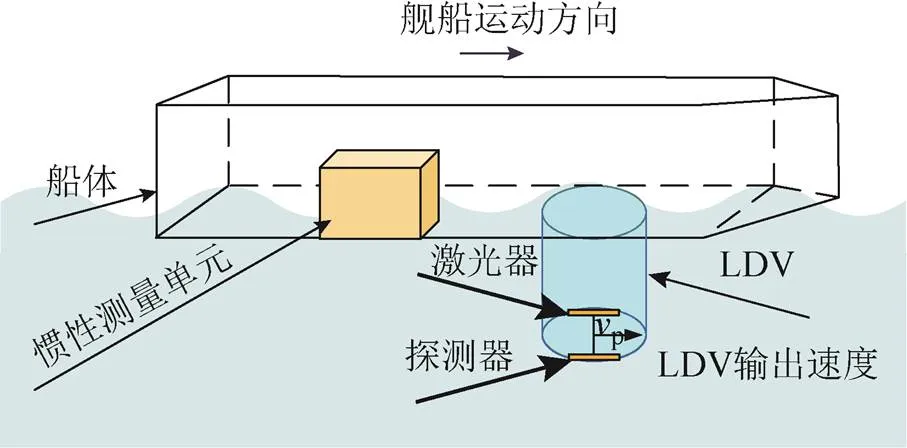
图1 水用LDV/SINS组合导航应用
1 水用一维LDV基本原理和误差模型
1.1 水用一维LDV基本原理
水用一维LDV的光路结构如图2所示。激光器出射的激光束经过分束器和反射镜后,变成平行的2束激光束,这2束光经过透镜聚焦相交,确定一个量测区域,运动粒子经过测量区域时,探测器接受运动粒子的前向散射光,获得2束光的多普勒频率,确定运动粒子的速度,从而测得载体相对于水的运动速度[18]。
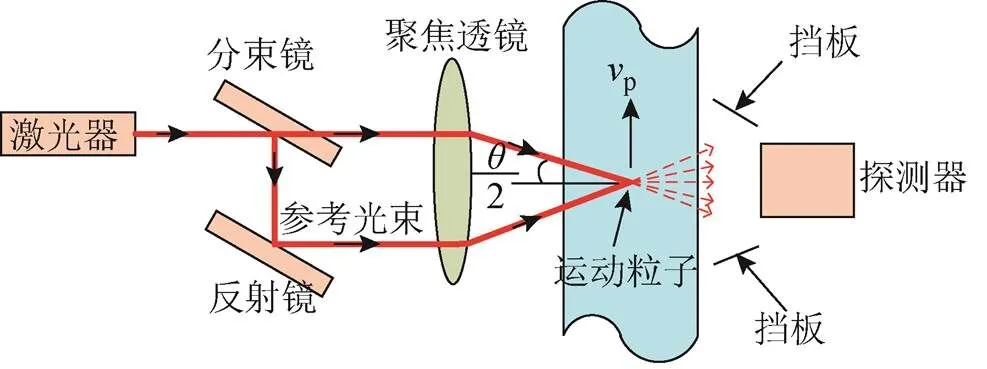
图2 水用一维LDV的光路结构
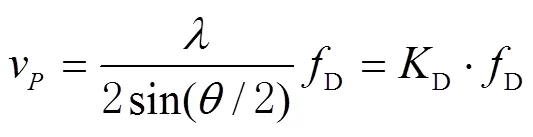
光电探测器输出的多普勒频率为

载体速度可表示为
1.2 水用一维LDV误差模型
LDV测量的是自身坐标系中的速度,在LDV与SINS进行组合导航时,需要将LDV输出的速度转换到SINS惯性测量单元(inertial measurement unit,IMU)坐标系中。由于在安装LDV和IMU时2个坐标系难以完全重合,因此存在LDV系与IMU系的安装误差角。此外LDV实际设计与理论设计也会存在偏差,导致刻度系数误差。安装误差角和刻度系数误差会极大影响惯导系统组合导航的精度;因此在组合导航之前,需要将这些参数标定出来。


激光测速仪速度在导航坐标系(n系)中的速度为

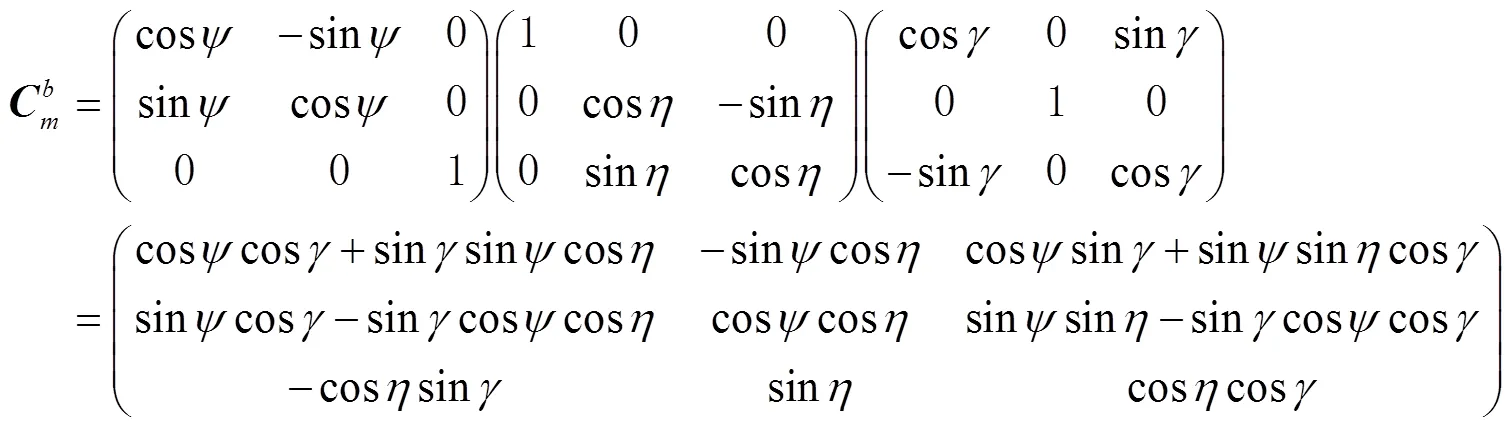
所以激光多普勒测速仪在IMU系中的速度为
根据坐标系之间的变换关系可得,导航系中激光多普勒测速仪的误差速度为

2 基于LDV的惯导系统相对速度阻尼方法
水用LDV测得的是载体相对于水流的速度,相比于对地速度的绝对速度,对水速度包含了水流的速度,在短时间内是常值,如果使用该速度直接进行导航,会给惯导系统引入常值误差,导致导航精度下降。因此不可采用传统的外速度水平阻尼方法。本文采用基于延迟滤波的相对速度阻尼方法。先对LDV测得的相对速度进行差分处理,然后将差分后的速度引入惯导系统,提高水用LDV/SINS导航精度。
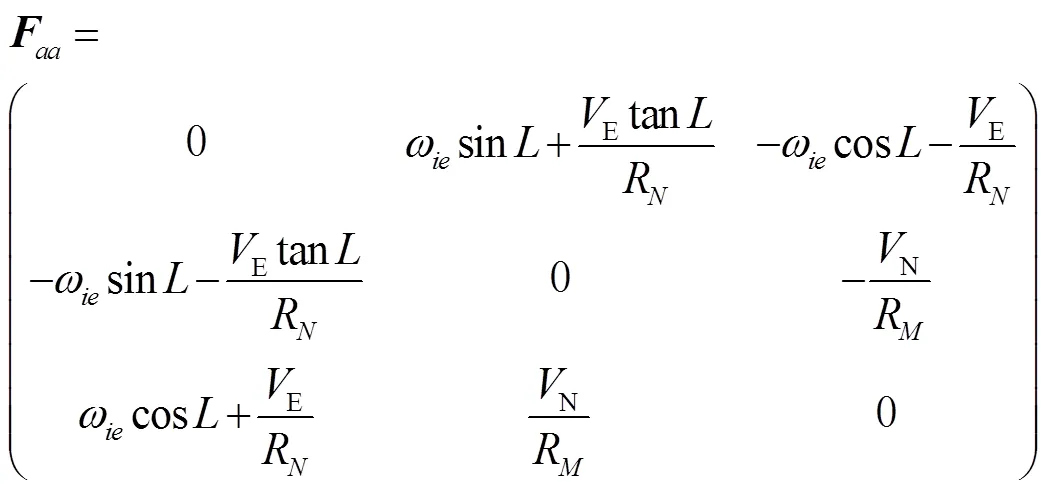
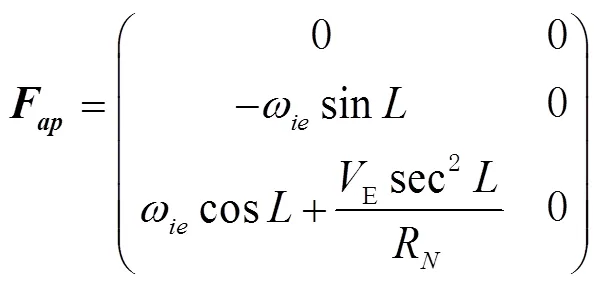
2.1 状态方程
基于SINS误差模型[19]及LDV误差模型建立16维的Kalman滤波器,滤波系统的误差状态变量为



其中:



噪声驱动阵为
系统的噪声矩阵为

2.2 量测方程
式中和-1分别表示2个连续采样时刻。从式中可以看出,消除了速度中水流的常值速度,得到了载体的真实速度增量。
同样将连续2次惯导解算速度相减得到速度增量




3 实验与结果分析
3.1 仿真条件
载体在0~1000 s间处于静止状态,1000 s后载体以转向速率0.1(°)/s向左转向,持续450 s;之后载体开始加速,加速度为1 m/s2,加速时间持续20 s;之后3 h内载体匀速直线运动;之后载体开始减速,加速度为1 m/s2,减速时间持续20 s;之后载体处于静止状态,直到仿真结束。
3.2 结果与分析
对无阻尼方式、传统外速度水平阻尼方式和对水速度水平阻尼方式进行导航仿真对比。结果如图4和图5所示。

图4 速度误差仿真结果

图5 位置误差仿真结果
从图4可看出:无阻尼惯性导航时,速度误差随时间周期振荡;传统的外速度阻尼方式,能够抑制速度误差的周期振荡,但是由于外速度本身的常值误差,使系统误差收敛于较大的值;对水速度水平阻尼方式既能够抑制速度误差的周期振荡,也能够消除外速度常值误差的影响,使速度误差收敛于较小的值。由图5可知:无阻尼导航时,位置误差随时间不断积累;传统阻尼方式由于外速度常值误差的影响,位置误差也随时间不断积累,对水速度水平阻尼方式能够较好地抑制位置误差的积累。
4 半物理仿真与分析
本文采用船载多普勒计程仪(Doppler velocity log,DVL)采集到的数据进行半物理仿真。实验船安装有IMU、DVL和一个单天线的GPS接收机。GPS输出速度和位置数据的更新频率为1 Hz,GPS和IMU组合导航输出的速度和位置数据作为实验的参考基准。
4.1 数据获取
船载实验在长江内进行,开始15 min载船处于系泊状态,然后载船驶出,运动时间大约6 h。在整个过程中,记录DVL、IMU和GPS输出的原始数据。其中DVL性能指标如下[21]:测速精度为0.5%V±0.5 cm/s;测速范围为-5.14~10.28 m/s;更新频率为1 Hz;发射频率为300kHz;底跟踪深度为300 m。
选取3600 s船载实测数据用于半物理仿真实验,考虑到DVL采集的是对地速度,需要在该数据的基础上加上水流速度作为LDV输出的对水速度。参考文献[22],选取2 m/s的水流速度作为本实验长江水流平均流速。
4.2 结果与分析
图6和图7分别给出了速度误差和位置误差半物理仿真结果。结合图4和图5给出的仿真结果,进一步说明该方法的可行性。

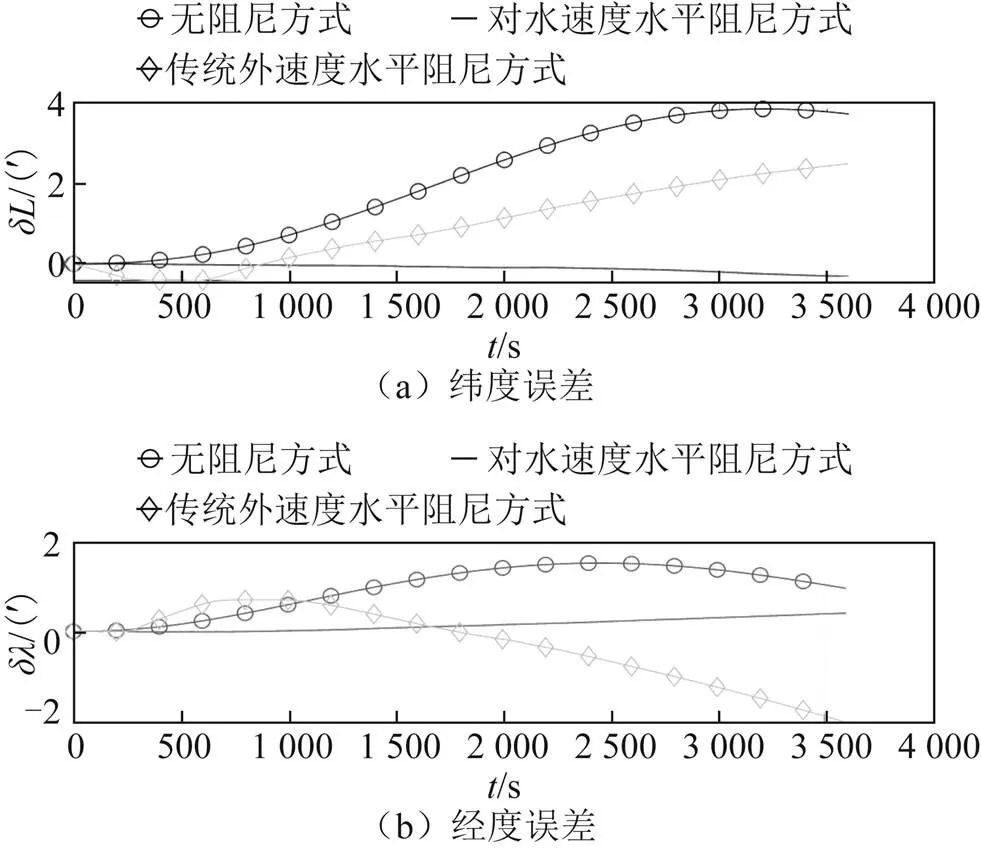
图7 位置误差半物理仿真结果
从图6和图7可知,传统阻尼方式和对水相对速度阻尼方式都能达到阻尼效果,但是在有水流常值误差下,后者相对于前者速度导航精度提高了84.89%,水平位置导航精度提高了84.05%。
5 结束语
本文针对陆用LDV/SINS依赖对地速度问题,提出对水速度LDV/SINS水平阻尼方法。实验和仿真结果表明,该方法能够有效抑制惯性导航系统的周期性振荡,同时能够较好地屏蔽掉水流的常值速度误差,提高LDV/SINS组合导航的精度,对提高水下载体导航系统的隐蔽性具有工程应用价值。
[1] 黄凤荣, 朱雨晨, 杨泽清, 等. 基于高斯混合模型的惯导/计程仪组合导航方法[J]. 中国惯性技术学报, 2019, 27(1): 32-35.
[2] LI J L, GAO J, LIANG Z H, et al. Analysis of polar region navigation algorithm of laser gyro single-axis rotation modulation inertial navigation[J]. Journal of Physics: Conference Series, 2022, 2183(1): 012030.
[3] 宋丽君, 周蕾, 赵万良, 等. 极区间接格网框架惯性基组合导航算法[J]. 导航定位学报, 2020, 8(6): 14-20.
[4] 陈永冰, 钟斌.惯性导航原理[M]. 北京: 国防工业出版社, 2007: 176-194.
[5] 查峰, 覃方君, 李峰, 等. 外速度参考条件下的惯导系统快速外阻尼算法[J]. 武汉大学学报(信息科学版), 2019, 44(3): 398-404.
[6] 沈熊. 激光多普勒测速技术及应用[M]. 北京: 清华大学出版社, 2004: 1-7.
[7] 周健. 用于车载自主导航激光多普勒测速仪的初步研究[D]. 长沙: 国防科学技术大学, 2010.
[8] 周健, 龙兴武. 基于Janus配置的激光多普勒测速仪[J]. 光电子.激光, 2011, 22(2): 266-271.
[9] 周健, 龙兴武. 用于车载自主惯导系统的激光多普勒测速仪[J]. 中国激光, 2010, 37(5): 1316-1321.
[10] 聂晓明. 用于车载自主导航系统激光测速技术研究[D]. 长沙: 国防科学技术大学, 2014.
[11] 王琦. 三维激光测速技术研究及其在惯导中的应用[D]. 长沙: 国防科技大学, 2018.
[12] WANG Q , NIE X M, GAO C F , et al. Calibration of a three-dimensional laser Doppler velocimeter in a land integrated navigation system[J]. Applied optics, 2018, 57(29): 8566-8572.
[13] WANG Q , GAO C F , ZHOU J , et al. Two-dimensional laser Doppler velocimeter and its integrated navigation with a strapdown inertial navigation system[J]. Applied optics, 2018, 57(13): 3334-3339.
[14] 刘飞, 刘超, 翁海娜, 等. 基于Kalman滤波技术的捷联惯导系统水平阻尼算法[J]. 中国惯性技术学报, 2013, 21(3): 285-288.
[15] ZHAO L, LI J S, CHENG J H, et al. Damping strapdown inertial navigation system based on a Kalman filter[J]. Measurement Science and Technology, 2016, 27(11): 115102.
[16] 赵琳, 李久顺, 程建华. 双滤波器捷联惯导外阻尼导航算法[J]. 哈尔滨工业大学学报, 2018, 50(3): 178-184.
[17] 涂克颇, 王世博. 基于自适应延迟状态滤波的惯导系统水平阻尼方法[J]. 光学与光电技术, 2021, 19(6): 113-117.
[18] 席崇宾, 周健, 王琦, 等. 一种基于惯组的激光多普勒测速仪的在线标定方法和装置: CN113092822A[P]. 2021-07-09.
[19] 秦永元. 惯性导航[M]. 北京: 科学出版社, 2014: 311-316.
[20] VERNON L S. Algorithms for Kalman filters with delayed state measurements[D]. Ames: Lowa State University, 1974.
[21] 李万里. 惯性/多普勒组合导航回溯算法研究[D]. 长沙: 国防科学技术大学, 2013.
[22] 卢金友. 长江河道水流流速分布研究[J]. 长江科学院学报, 1990(1): 40-49.
A horizontal damping method of LDV/SINS based on water velocity
CHENG Guangxin, YU Xudong, DONG Zhuangzhuang, TIAN Kaiwen, LI Ding,ZHANG Bin
(College of Advanced Interdisciplinary Studies, National University of Defense Technology, Changsha 410073, China)
Aiming at the problem that current external damping technology for strapdown inertial navigation system (SINS) depends on the absolute speed to the ground, the paper proposed a horizontal damping method for laser Doppler velocimeter (LDV)/SINS based on the relative speed to the water: the water velocity provided by LDV was used as the external reference velocity for SINS; and the navigation accuracy was improved by using the algorithms for Kalman filters with delayed state, regarding the change of velocity as measurement, to eliminate the influence of velocity constant error on the system. Semi-physical simulational results showed that this method could achieve the effective damping for the error of SINS; compared with the traditional damping method, the position navigation accuracy would be improved by 84.05% and the speed navigation accuracy by 84.89%, respectively, with the proposed method.
relative velocity damping; laser Doppler velocimeter (LDV); water velocity; inertial navigation
P228; V249.32
A
2095-4999(2023)02-0092-07
程广新, 于旭东, 董壮壮, 等. 基于对水速度的LDV/SINS水平阻尼方法[J]. 导航定位学报, 2023, 11(2): 92-98.(CHENG Guangxin, YU Xudong, DONG Zhuangzhuang, et al. A horizontal damping method of LDV/SINS based on water velocity[J]. Journal of Navigation and Positioning, 2023, 11(2): 92-98.)DOI:10.16547/j.cnki.10-1096.20230210.
2022-06-15
程广新(1994—),男,河南开封人,硕士研究生,研究方向为惯性导航。
于旭东(1982—),男,吉林长春人,副研究员,硕士生导师,研究方向为激光陀螺、惯性导航。
猜你喜欢
中学数学(2022年17期)2023-01-11
中学数学杂志(2022年17期)2022-09-20
军民两用技术与产品(2021年7期)2021-10-13
湖北农机化(2020年4期)2020-07-24
商品与质量(2019年51期)2019-11-28
北京航空航天大学学报(2017年5期)2017-11-23
导航与控制(2016年1期)2016-10-14
中国惯性技术学报(2015年1期)2015-12-19
机械与电子(2014年2期)2014-02-28
测绘科学与工程(2014年6期)2014-02-27
