
基于旋量分析的4-PaUS/PPPU并联机构设计与性能仿真
2023-04-08 16:15王同特黄海滨傅亭硕程华康
青岛大学学报(自然科学版) 2023年4期
王同特 黄海滨 傅亭硕 程华康


摘要:
由于并联机器人的多环结构能有效解决串联机器人在高精度加工领域精度低,刚性差,响应慢等问题,因此通过旋量法设计了一种新型4-PaUS/PPPU的2R3T并联构型,利用旋量理论分析了该机构的自由度,给出了机构的逆运动学逆解解析式。由运动/力传递性能分析结果可知,在工作空间内并联机构ITI值在0.7以上,运动/力传递性能良好。
关键词:
并联机器人;旋量理论;运动学;运动/力传递性能
中图分类号:
TH112
文献标志码:A
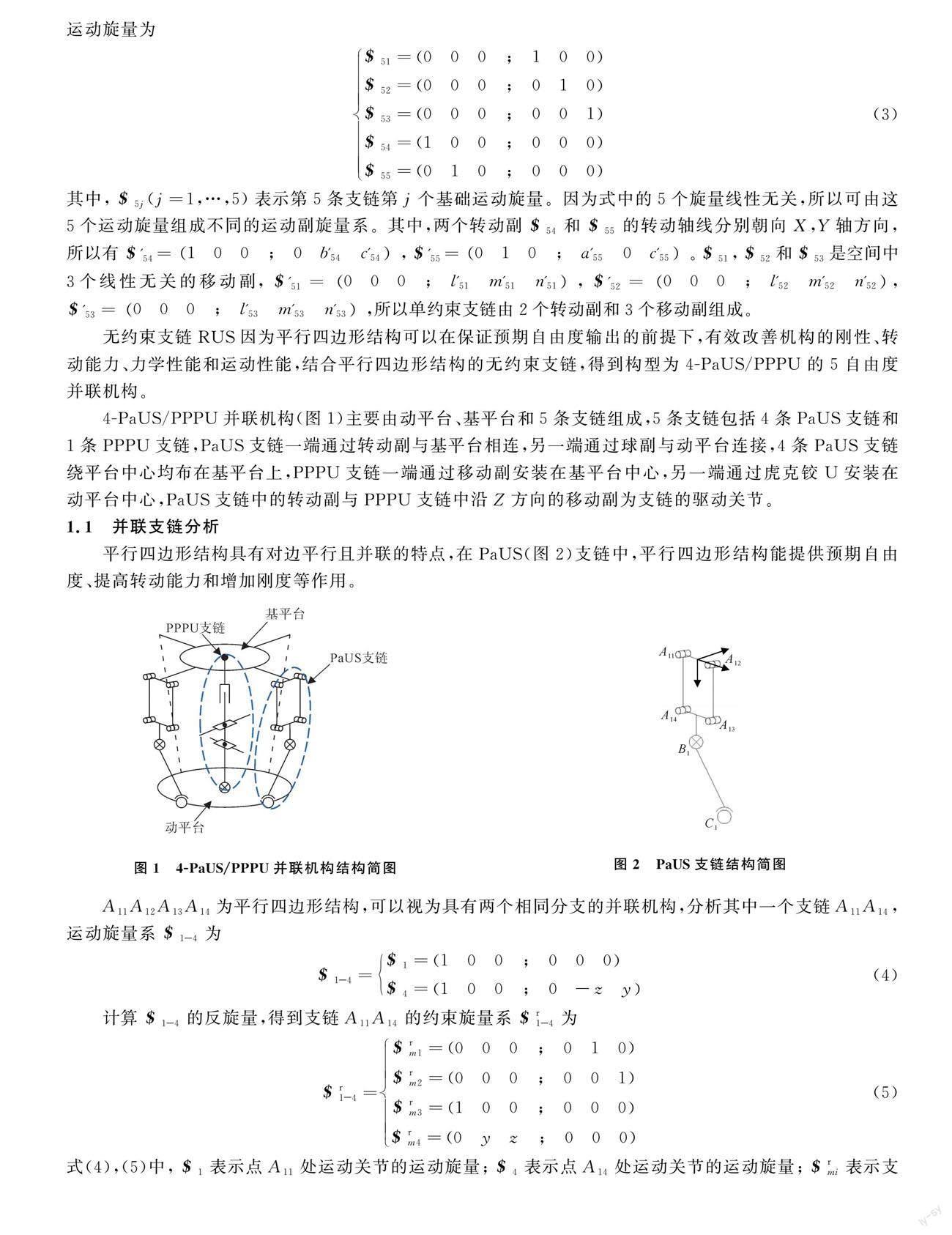
在轻载荷加工领域,串联机器人的优势十分明显,但在高精度、高刚度的加工领域受到一定限制[1-2]。虽然混联机器人结合了串联机器人和并联机器人的特点,但在结构紧凑、高刚度,良好的动态响应等性能上仍不如并联机器人[3-6]。目前国内外学者提出了许多5自由度并联机器人的新构型,如4-UPS/PPS机构[7],解决了恒力磨削加工中串联机器人刚度小,累计误差大,负载受限等问题,但在Z方向上运动范围较小。郭强[8-9]对4-SPRR/SPR机构进行了理论分析与尺寸优化,明显提高了4-SPRR/SPR机构的传递性能,但由于4-SPRR/SPR机构缺少Y方向的平动自由度,在加工领域中的应用受到一定限制。3-SPS/PPS[10]机构具有结构简单紧凑、运动平稳的特点,但约束了机构X方向的移动,且机构的性能还有待进一步验证。目前,在需要2R3T自由度的高精度加工,仍由人力进行,导致效率低,质量不稳定,工作环境差等问题[11-12]。本文利用旋量法设计了一种4-PaUS/PPPU构型的2R3T并联机构,运用旋量理论和运动/力性能指标[13-14]评价其性能。
奇异性是机构的固有特性,并联机构中,奇异主要分为两种:机构获得额外自由度,导致机构在某个自由度方向上的刚度与承载能力减弱,这类为约束奇异;机构失去一个或多个自由度,导致机构在失去自由度的方向上不可控,这类为传递奇异。当并联机构含有的约束力旋量数目不少于2时,机构可能发生约束奇异。PaUS支链对末端不提供约束,PPPU支链仅提供一个约束,所以机构末端只含有一个约束力旋量,故4-PaUS/PPPU并联机构不存在约束奇异。由图6~图8输入运动/力传递性能指标可知,4-PaUS/PPPU并联机构在工作区域内不存在输入传递奇异。
4 结论
本文设计了一种新型4-PaUS/PPPU的空间对称5自由度并联机构,机构的自由度为X、Y、Z向的移动自由度和绕X、Y轴的转动自由度,且Z向移动与其他运动无耦合,并通过机构的几何关系计算得到并联机构的位姿反解解析式,以机构整体输入传递性能指标(ITI)为评价指标,得到并联机构在工作范围内机构运动性能指标值在0.7以上,总体性能稳定且不存在约束奇异与输入传递奇异。
参考文献
[1]GAN D M, DIAS J, SENEVIRATNE L. Unified kinematics and optimal design of a 3rRPS metamorphic parallel mechanism with a reconfigurable revolute joint[J]. Mechanism and Machine Theory, 2016,96: 239-254.
[2]许允斗, 徐郑和, 杨帆, 等. 考虑工作空间与力传递效率的新型五自由度混联机器人设计与分析[J]. 中国机械工程, 2019,30(16): 1996-2002.
[3]DONG C L, LIU H T, YUE W, et al. Stiffness modeling and analysis of a novel 5-DOF hybrid robot[J]. Mechanism and Machine Theory, 2018,125: 80-93.
[4]CHONG Z H, XIE F G, LIU X J, et al. Design of the parallel mechanism for a hybrid mobile robot in wind turbine blades polishing[J]. Robotics and Computer-Integrated Manufacturing, 2020,61: 101857.
[5]LI J, YE F, SHEN N Y, et al. Dimensional synthesis of a 5-DOF hybrid robot[J]. Mechanism and Machine Theory, 2020,150: 103865.
[6]ZOU Q, ZHANG D, HUANG G Y. Dynamic performance evaluation of the parallel mechanism for a 3T2R hybrid robot[J]. Mechanism and Machine Theory, 2022,172: 104794.
[7]杨智勇, 周红军, 方乔, 等. 5自由度并联机器人位姿与工作空间特性分析[J]. 机械传动, 2021,45(9): 75-80.
[8]郭强, 崔国华, 鱼海东, 等. 4-SPRR-SPR并联机构运动性能评价与尺寸优化[J]. 农业装备與车辆工程, 2021,59(3): 1-5.
[9]张金柱, 史汉卿, 王涛, 等. 五自由度并联驱动机构及其位置分辨能力分析[J]. 中国机械工程, 2021,32(12): 1414-1422.
[10] 周毅钧, 傅敏, 郑小东. 3-SPS/PPS并联机构运动学分析[J]. 科学技术与工程, 2021,21(1): 152-157.
[11] 黎广喜, 刘海涛, 徐青山, 等. 铣削加工用混联机器人参数曲线插补方法[J]. 航空制造技术, 2018,61(16): 43-50.
[12] ZHANG D S, XU Y D, YAO J T, et al. Analysis and optimization of a spatial parallel mechanism for a new 5-DOF hybrid serial-parallel manipulator[J]. Chinese Journal of Mechanical Engineering, 2018,31:54.
[13] WANG J S, WU C, LIU X J. Performance evaluation of parallel manipulators: motion/force transmissibility and its index[J]. Mechanism and Machine Theory, 2010,45(10): 1462-1476.
[14] 陈祥, 谢福贵, 刘辛军. 并联机构中运动/力传遞功率最大值的评价[J]. 机械工程学报, 2014,50(3): 1-9.
[15] 黄真, 刘婧芳, 李艳文. 150年机构自由度的通用公式问题[J]. 燕山大学学报, 2011,35(1): 1-14.
Design and Performance Simulation of 4-PaUS/PPPU
Parallel Mechanism Based on Screw Analysis
WANG Tong-te, HUANG Hai-bin, FU Ting-shuo, CHENG Hua-kang
(School of Mechanical and Automotive Engineering,
Xiamen University of Technology, Xiamen 316000, China)
Abstract:
As the parallel robot multi-ring structure can effectively solve the series robot in the field of high precision processing low accuracy, poor rigidity, slow response, a novel 4-PaUS / PPPU 2R3T parallel configuration was designed by screw method. The degree of freedom of the mechanism was analyzed by using the spiral theory, and the inverse kinematics inverse solution analytical formula of the mechanism was given. The motion/force transmission performance was simulated, and the ITI value of the parallel mechanism in the working space was above 0.7, which had good motion/force transmission performance.
Keywords:
parallel robot;screw theory;kinesiology;motion/force transmissibility
收稿日期:2023-03-17
基金项目:
福建省自然科学基金(批准号:2022J011244)资助。
通信作者:
黄海滨,男,博士,副教授,主要研究方向为机器人控制技术、智能控制算法研究及工程应用。E-mail:2010110817@xmut.edu.cn
猜你喜欢
故事作文·低年级(2023年11期)2023-12-05
故事作文·低年级(2023年12期)2023-03-24
湖南电力(2022年3期)2022-07-07
高师理科学刊(2020年1期)2020-11-26
佛山科学技术学院学报(自然科学版)(2020年1期)2020-03-12
制造技术与机床(2019年7期)2019-07-22
电子制作(2018年17期)2018-09-28
组合机床与自动化加工技术(2017年5期)2017-05-25
中国环境监察(2016年7期)2016-10-23
中国现当代社会文化访谈录(2016年0期)2016-09-26
