
模型大不确定下的导弹姿态控制系统设计
2023-04-03 08:23张文杰周建平夏群利
兵器装备工程学报 2023年3期
周 航,张文杰,周建平,夏群利
(1.北京理工大学宇航学院, 北京 100081; 2.北京电子工程总体研究所, 北京 100854)
1 引言
随着导弹武器技术的不断发展,现代化战争对导弹的机动性和快速性等要求大幅提高,尤其是在高超声速再入、强机动突防和跨域变外形等复杂作战场景下,控制系统的设计呈现出强耦合、强非线性、快时变和大不确定性等特点。传统的控制系统设计方法难以满足现代化战争以及未来智能化战争对导弹控制能力的要求,迫切需要进行模型大不确定下的智能控制系统设计。
近年来,学术界对导弹这类复杂非线性系统控制方法进行了广泛的研究[1-4],其中动态逆[5-7]设计方法能够增强非线性条件下控制系统的性能,从而得到了一定应用。但是基于动态逆的设计方法通常对飞行器模型建模精度要求较高,在复杂战场环境和自身强耦合特性下,模型大不确定导致其难以实现有效控制。滑模控制(sliding mode control,SMC)由于原理及结构简单,对外界干扰具有较强的鲁棒性,且能够根据不同的控制要求设计各种形式的滑模面,例如快速终端滑模[8]、非奇异滑模[9]等,目前已被广泛应用于工程控制领域。但是滑模控制系统的设计也很大程度上依赖于被控对象模型的准确性,因此当模型不确定时,需要结合其他方法实现对模型不确定部分的预测。神经网络算法源于对人脑功能特征的模仿,网络具有高度非线性,同时具备自主化、自进化的学习能力,非常适合处理大不确定性和模糊性的问题。神经网络中的径向基函数(radial basis function,简称RBF)神经网络具有万能逼近特性,收敛速度较快,同时具备较好的泛化能力[10]。因此,可将RBF神经网络与滑模控制相结合,实现导弹模型大不确定下的智能自适应控制。在RBF神经网络与滑模控制相结合方面,已有部分学者对其开展了相关研究[11-18],研究主要侧重于RBF神经网络对系统所受外界扰动的估计,通过对扰动的补偿提高控制系统的鲁棒性,但是较少考虑系统自身模型大不确定对控制系统设计带来的问题。
导弹系统模型的不确定性主要来自于跨空域、宽速域和外界干扰条件下动力学系数的不确定性以及操纵机构的控制不确定性,例如舵面受损、摩擦阻滞效应等。本文基于RBF神经网络提出了一种导弹智能自适应姿态控制系统设计方法,首先结合滑模理论建立姿态控制系统动力学方程,然后仅根据系统的输入输出信息,运用RBF神经网络智能感知系统的动力学特性,进而逼近系统中的不确定项,通过对控制律及网络权值更新律的设计,实现模型大不确定情况下的导弹姿态智能自适应控制。最后通过数学仿真验证该控制系统设计方法的有效性,对于提升导弹的飞行稳定性和控制鲁棒性具有一定的现实意义。
2 姿态控制系统建模
对于侧滑转弯(skid-to-turn,STT)控制的导弹,姿态控制的核心在于对滚转通道进行稳定,从而避免因弹体滚转带来的气动耦合效应;对于倾斜转弯(bank-to-turn,BTT)控制的导弹,姿态控制需要根据过载指令分配原则,快速准确地调整弹体倾斜角以保证纵侧向的精确制导。因此无论是何种控制方式,对滚转通道的姿态控制都是实现导弹精准打击的关键。本节主要建立滚转通道的导弹动力学模型以及基于滑模控制理论的姿态控制系统模型。
2.1 动力学系统建模
导弹在高速大机动运动状态下滚转通道与偏航通道耦合严重,为了实现滚转通道的姿态控制,建立如式(1)所示的动力学系统模型:
(1)
式(1)中:γ为导弹滚转角;ωx为弹体滚转角速度;q为大气动压;Sref为导弹的特征面积;Lref为导弹的特征长度;Jx为绕弹体轴的转动惯量;mx为滚转力矩系数,包括了横侧向的耦合力矩系数,可进一步表示为
(2)
2.2 滑模控制系统建模
根据导弹滚转通道动力学模型,取弹体滚转角及角速度为控制系统的状态量,即
x=[x1x2]T=[γωx]T
(3)
将式(2)和式(3)代入式(1)中,建立弹体姿态控制系统模型:

(4)
式(4)中:cωx、cδx、cβ、cωy、cδy为滚转通道对应的动力学系数,计算表达式如下:

取滚转舵偏角为系统控制量,即u=δx;令f(x)=-cωxx2,g(x)=-cδx;将气动耦合项视为控制系统的时变干扰项,即d(t)=-cββ-cωyωy-cδyδy,且满足|d(t)|≤D(D≥0且有界),则式(4)可写为
(5)
令姿态角指令为x1d,则系统的响应误差为e=x1d-x1,对控制误差求导得:
(6)
由此可设置滑模函数为
(7)
其中,k>0。
对式(7)求导并结合式(5)和式(6)可得:
(8)
假设控制系统模型完全已知,即f(x)和g(x)可测,设计控制律:
(9)
将式(9)代入式(8)可得:

(10)
取η≥D,由Lyapunov到达条件可得:

(11)

然而导弹在复杂大动态环境下存在气动参数摄动,导致模型中的f(x)和g(x)实际无法准确获得;另外,导弹操纵机构可能存在性能下降或者在大扰动下摩擦阻滞效应严重。故接下来采用RBF神经网络自适应感知系统模型的不确定项,从而得到相应项的估计值,解决滑模控制律的设计问题,最终完成导弹姿态的智能自适应控制。
3 模型不确定下的智能自适应控制
从姿态控制系统模型可以看出,系统模型的不确定性主要来自动力学参数的不确定以及舵控效应的不确定。其中,气动耦合项参数不确定可通过滑模控制对干扰项具有鲁棒性进行解决,即通过设置合理的切换增益来消除耦合小量的影响;而对于控制系统主要动力学参数和舵控效应不确定的问题,可结合神经网络的强大感知能力来进行自适应估计补偿。因此,本节分别对2种模型不确定情况进行基于RBF神经网络的智能自适应鲁棒控制系统设计。
3.1 动力学模型不确定情况
当动力学模型不确定时,采用RBF神经网络来逼近模型中的f(x)和g(x),闭环控制系统结构如图1所示。
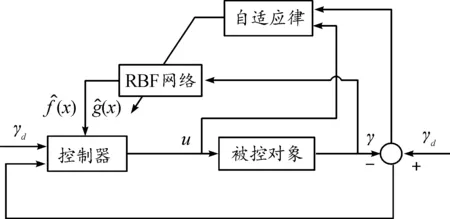
图1 闭环控制系统结构图
图1中的RBF神经网络是一种三层神经网络,包括输入层、隐含层和输出层,其输入输出算法为
(12)
其中:x为网络输入;j为网络隐含层第j个节点;h=[hj]T为高斯基函数的输出;cj为高斯基函数的中心;bj为高斯基函数的宽度参数;W*和V*为逼近f(x)和g(x)的理想网络权值;εf和εg为网络逼近误差,且|εf|≤εMf,|εg|≤εMg。

(13)
设计自适应滑模控制律为
(14)
其中,η≥D。
将f(x)和g(x)分别记为f和g,并将式(12)—式(14)代入式(8)可得:



(15)

定义Lyapunov函数为
(16)
其中,γ1>0,γ2>0。
对式(16)求导得:

(17)
将式(15)代入式(17)中可得:
s(-εf-ηsgn(s)-εgu-d(t))
(18)
设计神经网络权值向量的自适应更新律为

(19)
将式(19)代入式(18)中可得
(20)

3.2 舵控模型不确定情况
除动力学模型大不确定外,导弹在飞行过程中可能会遭遇来自敌方拦截武器的攻击以及来自恶劣交变环境的影响,对控制系统最直接的影响体现在舵效的变化,例如舵面受损、舵机摩擦阻滞等。
考虑上述影响因素,可将控制系统描述为

(21)
式(21)中:δ(x)为舵效变化导致的舵片偏转附加值,与系统状态量和外界扰动有关,是大不确定项。
因此,如果导弹在运动过程中出现了舵效变化的情况,根据原系统生成的名义控制量和实际控制量将存在不确定误差,进而导致控制系统性能变差。此时可结合RBF神经网络的逼近能力对δ(x)进行预测估计,从而实现控制信号的补偿。
RBF神经网络输入输出算法为
(22)
其中:Q*为逼近δ(x)的理想网络权值;εδ为网络逼近误差,且|εδ|≤εMδ;其他参数同式中的定义。
取网络输入为x=[x1x2]T,RBF神经网络输出为
(23)

(24)
此时,根据式(21)求得滑模函数的导数为

(25)
设计舵控模型不确定下的智能补偿控制律为
(26)
将式(26)和式(24)代入式(25)中可得:

(27)
定义Lyapunov函数为
(28)
其中,γ>0。
结合式(27)对式(28)求导得:
(29)
设计神经网络权值向量的自适应更新律为
(30)
取η≥|gεδ+D|,并将式(30)代入式(29),可得:
(31)
由式(31)可知,所设计的控制方法具有稳定性。
4 仿真分析
采用所设计的模型大不确定下的智能自适应控制方法进行数学仿真,验证其对导弹姿态的控制性能。针对动力学模型不确定情况,选取动力学参数cωx=0.1,cδx=7;设计控制系统参数为:γ1=500,γ2=6,k=10,η=60;干扰项设为d(t)=50。RBF神经网络的高斯基函数参数取为ci=[-2 -1 0 1 2],bi=5。令姿态角指令为γd=sin(t),为防止指令在零附近发生剧烈抖振,仿真中采用饱和函数代替符号函数,得到仿真结果如图2—图6所示。
由仿真结果可知,控制系统的姿态角γ与姿态角速度ωx响应良好,姿态角速度的变化在0.5 s内收敛。采用所设计的RBF神经网络预测方法得到了较为准确的系统不确定项f(x)和g(x)的估计值,达到了对系统不确定性估计的目的。由于系统的不确定性,控制指令u在初始时刻存在抖振,但能够在0.5 s内收敛,验证了所设计的控制系统的有效性。

图2 姿态角指令跟踪曲线

图3 姿态角速度指令跟踪曲线

图4 控制量变化曲线

图5 不确定项f(x)估计曲线

图6 不确定项g(x)估计曲线
为了进一步说明所设计控制器的鲁棒性,将偏差加入到系统动力学模型,并与文献[19]所设计的自抗扰控制器进行对比,仿真结果如图7所示。由图7可知,当系统存在偏差时,采用本文方法控制精度更高,而文献[19]的方法存在一定偏差,验证了控制系统具有较强的鲁棒性。
对舵效不确定情况进行仿真试验,假设舵效附加项为δ(x)=x2-0.2sgn(x2),动力学参数和神经网络参数同上,取γ=5,η=3,仿真结果如图8和图9所示。
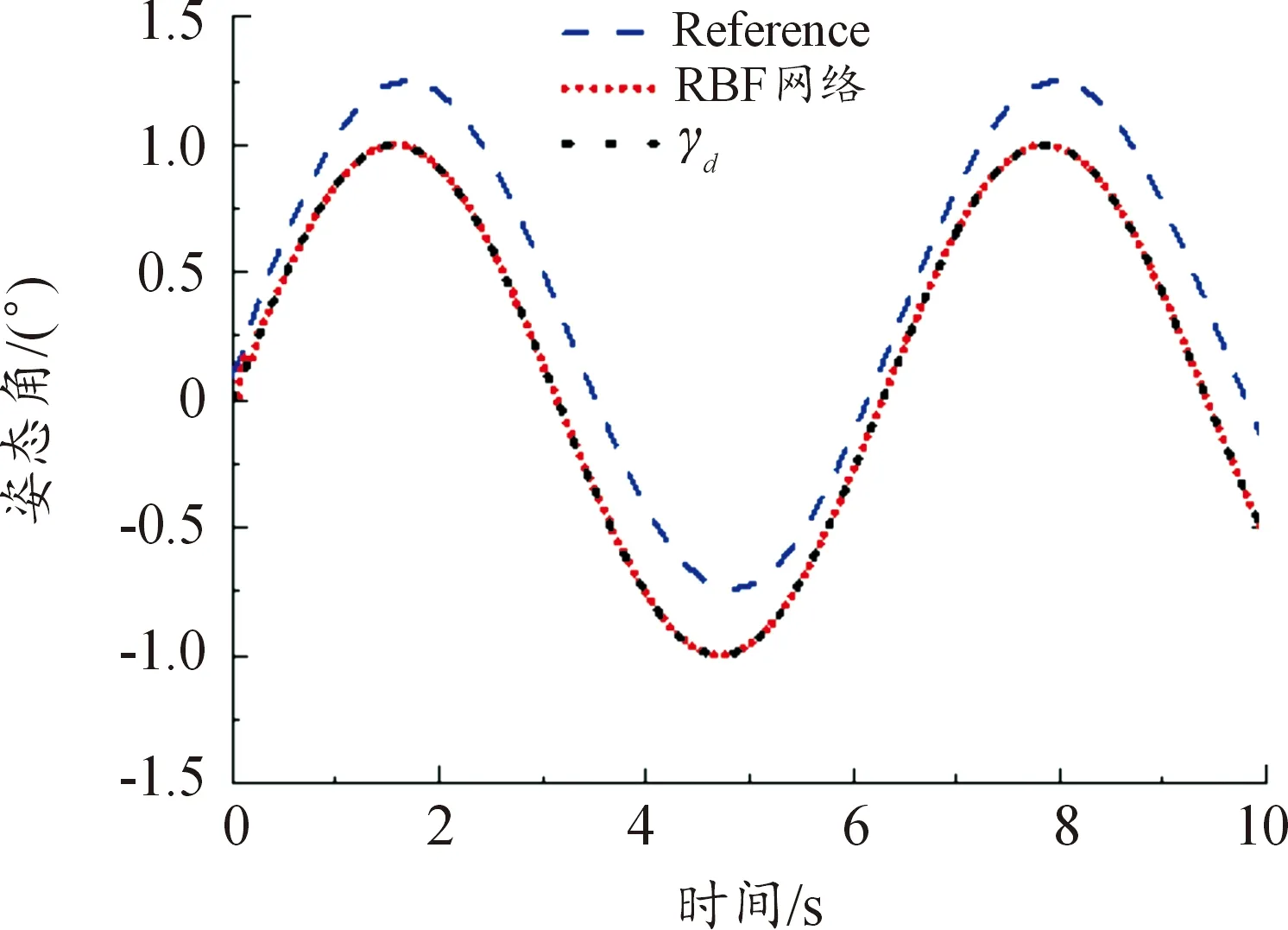
图7 2种方法的控制效果对比图

图8 姿态角指令跟踪曲线

图9 不确定项δ(x)估计曲线
从图9可以看出,利用RBF神经网络对舵效变化带来的补偿项进行了较为准确的估计,从而实现了舵效不确定情况下的智能补偿和自适应控制。
5 结论
本文针对模型大不确定情况设计了基于RBF神经网络的智能自适应姿态控制系统,通过理论分析、数学证明及仿真验证形成以下结论:
1) 利用RBF神经网络能够解决传统滑模控制因模型不确定带来的控制律设计问题,将RBF网络应用于滑模控制中能够实现导弹在复杂战场环境下的智能控制。
2) RBF神经网络具有较强的自学习和自进化能力,能够在短时间内完成对系统未知量的学习与估计,并且估计精度较高,泛化能力强。
3) SMC与RBF网络相结合的智能自适应控制系统具有通用化的设计思想,但是系统稳定性对控制参数的选取具有严格要求,否则难以保证系统稳定性。
猜你喜欢
哈尔滨商业大学学报(自然科学版)(2022年4期)2022-08-18
装备制造技术(2021年1期)2021-05-21
吉林大学学报(理学版)(2020年3期)2020-05-29
三峡大学学报(自然科学版)(2019年5期)2019-10-17
中国惯性技术学报(2019年6期)2019-03-04
测控技术(2018年4期)2018-11-25
测控技术(2018年3期)2018-11-25
自动化学报(2018年2期)2018-04-12
北京航空航天大学学报(2016年3期)2016-02-27
三峡大学学报(自然科学版)(2015年2期)2015-07-25
