一种纯电动汽车自学习型控制策略
2023-03-27 07:09苏松林吴傲雪
汽车实用技术 2023年6期
赵 爽,苏松林,吴傲雪
(安徽江淮汽车集团股份有限公司 技术中心,安徽 合肥 230041)
随着信息通信、互联网、大数据、云计算、人工智能等技术在汽车领域广泛应用,汽车正加速向智能化转变[1]。液晶屏幕的使用带来的是更加直观的信息显示。其中液晶显示器(Liquid Crystal Display, LCD )因其显示内容丰富、工作稳定、功耗低、寿命长等优点在仪表显示领域得到了广泛应用[2]。车载仪表显示屏作为最重要的人机界面组成之一,是车辆操作的重要依据[3]。电动汽车仪表上显示的信息很多,诸如充电时间、驱动功率、回收功率、可用驱动功率、可用回收功率、电池电量、电池容量、电池能量等。前期的电动汽车对于此类信息是按照固定算法进行计算,没有考虑其容量的衰减。上述信息中如充电时间、可用驱动功率、可用回收功率等会随着电池容量的衰减而变得不准确,给用户带来困惑。
因此,本文提出一种自学习型车辆控制策略,通过汽车整车控制器(Vehicle Control Unit, VCU)的存储功能,对某一功能进行自学习型修正,从而保证车辆全生命周期的使用过程中,对于车辆信息的显示始终能保持真实性和准确性。下面列举3项应用自学习策略的功能,如图1所示。
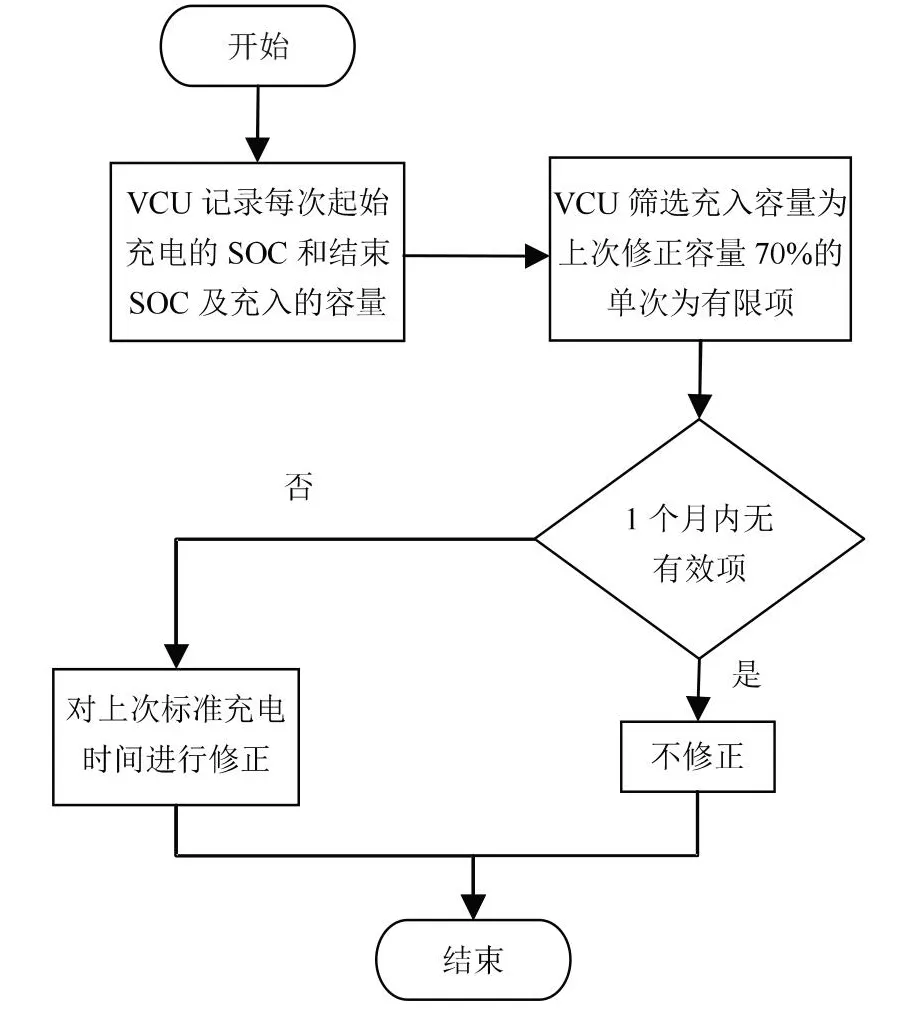
图1 标准充电时间修正原理图
1 充电时间自学习
充电剩余时间受到充电电流的调整进行变换,尤其是普遍使用的动力锂电池充电电流的大小受到充电桩、电池温度和SOC等多种因素制约[4]。因此,充电时间是一个变化波动的值。
1.交流充电部分
交流充电包含2 kW、3.5 kW和7 kW充电输入功率,交流充电时间正常显示为
Tshow为仪表显示剩余充电时间;T1为标准充满充电时间;SOCnow为实时的SOC值,φ1为电流修正系数;I2为2 kW桩标准充电电流;Inow为实时充电电流,正常情况下I2=Inow,开空调或者热管理部件开启时,I2>Inow。
同理可得出3.5 kW充电和7 kW充电充电剩余时间的显示。
2.直流充电部分
直流充电时间正常显示为
Tshow为仪表显示剩余充电时间;T1为标准充满充电时间;SOCnow为实时的SOC值;φ4为电流修正系数;I4为快充桩标准充电电流(常温无限电流工况);Inow为实时充电电流,正常情况下I4=Inow,开空调或者热管理部件开启时,I4>Inow。
不同于交流充电,直流充电在不同SOC区段VCU发送的电流指令不同,既I4不是固定值,这里对φ4进行了分段处理。
3.标准充电时间T1,T2,T3和T4的修正
VCU程序中有单独对T1、T2、T3和T4进行修正的函数,修正周期为 1个月。修正策略如图2所示,修正公式为
式中,T'2为本次修正后的标准充电时间;T2为上次修正后的标准充电时间;η1为单次有效项修正系数;~η为总修正系数。
此算法优势在于:
1)基于初始标定充电时间进行计算,具有精度高不会出现异常值的问题;
2)初始标定充电时间具有自学习的功能;
3)可通过 VCU远程升级对初始标定时间进行远程修正;
4)通过车辆本身的自学习可以不用考虑环境温度的变化对电池容量的影响[5]。
2 驾驶员行为分析自学习及修正提示
良好的驾驶习惯,有助于减少能量的消耗[6],本论文通过对驾驶员驾驶行为的记录,并对其进行分析,再与理论最佳驾驶行为进行比较得出修正提示,并通过点火控制模块(Ignition Control Module, ICM)或者车载信息娱乐系统(In-Vehicle Infotainment, IVI)对驾驶员进行提醒。
如下列出3项提示内容:
1)能耗提醒。VCU监控最近10 km、25 km及50 km能耗值满足上述公式提示用户“整车能耗较高,请优化驾驶行为!”其中,δ10km、δ50km、δ25km分别为10 km能耗、25 km能耗、50 km能耗超过预设值时间占总行驶时间比例。
2)充电提醒。VCU监控驾驶员的充电行为,并对C值进行判断。
式中,Cη为快充因子;Cfast_charge为快充次数;Ccharge为总充电次数。
当Cη>0.9,提示用户“建议车辆进行交流充电!提高电池寿命”,如图2所示。
3)驾驶行为提醒。VCU监控驾驶员的驾驶行为,并对A值进行判断:
式中,A为单次行驶大电流时间占总行驶时间比例(包含驱动正电流和能量回收负电流),其中驱动和回收分别有阈值作为判断依据。
当A≥20%时:
VCU会存储总行驶次数和A'次数会对用户驾驶行为进行分析,并对进行分段,如图2所示,其中θ默认为标准。

图2 驾驶员行为评分标准
3 可用剩余功率自学习
依据最新国标GB/T 19836—2019要求,纯电动汽车和燃料电池电动汽车驱动系统有功率输出时,车辆仪表应指示或显示车辆驱动系统输出的瞬时功率,应同时指示或显示车辆驱动系统的可用剩余功率[7]。
本文所述功率分为可用剩余功率和实际功率,可用功率为固定值,实际功率只有在车辆加速或减速时才会有数值,可用剩余功率又分为可用驱动功率和可回收功率,实际功率分为实际驱动功率和实际回收功率。由于电机为电动汽车中最大的耗能部件,且仪表盘显示的功率代表含义也为实际电机驱动功率和回收功率。
3.1 非自学习型可用功率计算
1.实际功率计算公式
可以依据整车总线的电机扭矩值T电机和电机转速值N电机进行计算,公式[8]如下:
本文所述车型限功率分为温度限功率、故障限功率、总压限功率、单体限功率四种限功率类型,通过比较四种限功率情况下得出限功率值取最小值为实际可用功率值。如图3所示。
2.温度限功率
当最高单体温度达到电池包设定温度范围[T1,T2]阈值后,可用功率为
3.故障限功率
当出现驱动或回收限功率故障时,可用功率为P故障限功率=P蠕行。
其中,P蠕行为故障模式下,电机蠕行的最大功率或电池回收最大功率。
4.总压限功率
在激烈驾驶情况下,电池包总压会出现急速下降,进而导致电池包输出功率急速下降,此时需要对总压进行分段,然后线性降低可用功率值为
式中,V1和V2分别为总压限功率分段标定值;V实时为实时电池包总压值。
5.单体限功率
当电池包单体电压下降到一定阈值后,可用功率为
3.2 自学习型可用功率计算
任何电池在长期运行过程中,不可避免地会出现能量和容量衰减,而且非正常衰减会引发安全事故[9]。依据电池的衰减参数进行计算,电池出厂时会提供的功率参数表的理论值,对应不同温度不同SOC下电池包可放出的最大功率和可回收的最大功率。VCU通过对功率参数表理论值进行查表得出此时最大的可用功率P可用。
但是随着电池包使用时间的增长查表值会变得不准确,因此,本文通过电池包厂商提供的衰减因子δ(通过大量实验得出δ<1)。和通过功率参数表得出的可用功率P可用进行修正得出非限功率情况下的可用功率,修正周期为车辆达到满功率100次,通过VCU存储功能判断未修正前,满功率情况下的实际功率与可用功率的差值大于1 kW(此为标定值)的次数,当此次数超过阈值N时。VCU自主判断满足修正条件。
修正因子:
修正周期:=100次。
修正依据:满功率情况下的实际功率与可用功率的差值大于1 kW(此为标定值)的次数M和整车达到满功率的次数。
修正判断条件:
修正恢复条件:
满足修正恢复条件则跳回上次修正因子。
式(11)到式(13)中的不仅针对驱动功率显示,也针对回收功率显示,如图4所示。此算法优势在于可通过VCU的自主学习判断来调节可用剩余功率的大小,不会因为电池包使用寿命的增长出现可用剩余功率不准确的情况。
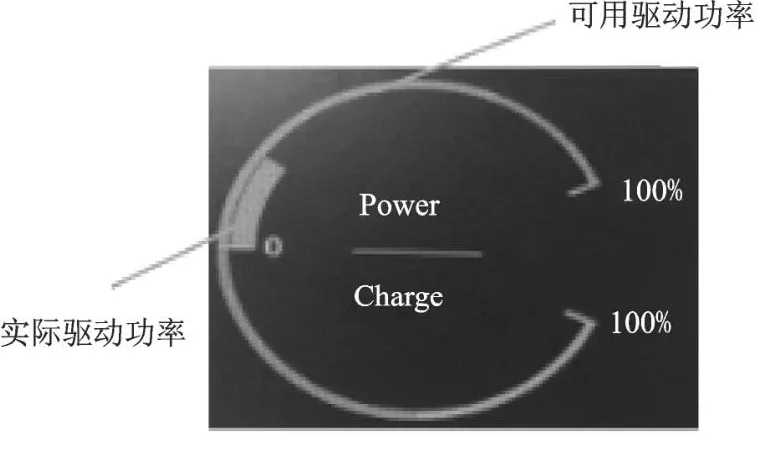
图4 实车显示图
4 结论
综上所述,本论文所述自学习控制策略罗列了充电时间,驾驶员行为分析,可用剩余功率的算法,可扩展到其他不同功能的自学习型开发,通过VCU存储或者远程OTA对修正因子和初始标定值进行监控和修正,达到车辆实现自适应算法的功能。数据截至2022年8月已实现搭载此策略量产车型26 791台。
猜你喜欢
汽车维修与保养(2020年11期)2020-06-09
中华家教(2018年10期)2018-10-30
中国惯性技术学报(2017年1期)2017-06-09
单片机与嵌入式系统应用(2017年8期)2017-04-17
电脑知识与技术(2016年24期)2016-11-14
光学精密工程(2016年3期)2016-11-07
广西电力(2016年5期)2016-07-10
学习月刊(2015年6期)2015-07-09
中国高新技术企业(2015年14期)2015-04-29
当代教育实践与教学研究(2015年2期)2015-02-27