
AGV控制系统改进抗干扰模糊PID研究
2023-03-19 11:25袁鹏徐长风周军杨子兵
机械设计与制造 2023年3期
袁鹏,徐长风,周军,杨子兵
(1.山东大学机械工程学院,山东 济南 250061;2.山东大学高效洁净机械制造教育部重点实验室,山东 济南 250061;3.山东大学机械工程国家级实验教学示范中心,山东 济南 250061)
1 引言
随着制造业智能化和物流自动化程度越来越高,自动导引运输车(Automated Guided Vehicle,AGV)广泛应用在包括汽车制造、微电子生产、物流搬运等诸多领域。然而,AGV作为一种无人驾驶车辆,常面临多变和不确定环境,易受到外界干扰,这对自主执行任务的控制策略提出了巨大的挑战。
传统AGV控制策略采用PID(比例−积分−微分)算法,无需求解控制对象数学模型,结构简单、计算较快、灵活性高。PID算法是控制领域常用的闭环反馈控制策略,在工业领域接受度很高。在运用PID进行控制时,难点在于PID参数的整定,传统方法是Ziegler−Nichols1942 年提出的步骤响应和频率响应PID 参数整定[1],文献[2]在传统Ziegler−Nichols法的基础上做了改进。文献[3]提出了一种将模糊算法与常规PID算法结合的控制策略,以抑制车辆传动系统的扭振情况。考虑到控制系统实时性的要求,PID参数应根据工况的改变在线作出调整,PID参数自整定方法开始被研究[4],其中,将模糊逻辑与常规PID结合形成的模糊PID算法得到了广泛的应用[5−6]。
针对工业现场对AGV 抗干扰性能的要求,研究PID 参数对控制系统性能的影响机理,结合模糊逻辑的算法原理,提出了一种改进模糊PID 算法,同时,提出一种控制系统性能评估方法,在MATLAB 的Simulink 环境下建立模型对改进模糊PID 算法进行了仿真,比较算法改进前后系统性能,定量分析改进算法的优势。
2 AGV系统运动学模型
建立AGV运动学模型,如图1所示。在对AGV进行运动学分析前,需做如下假设[7]:(1)地面水平。(2)车体为刚性结构。(3)驱动轮做纯滚动,无相对滑移。

图1 AGV运动状态示意图Fig.1 Schematic Diagram of AGV Motion State
AGV质心O(1O2)的速度为:
式中:vL—AGV左轮速度;vR−AGV右轮速度。
将质心速度沿x轴分解:
式中:q—AGV左右两轮中心连线与x轴的夹角。
由几何关系,AGV运动的转弯半径为:
式中:L—AGV左右两轮的间距。AGV运动角速度为:
式中:R—AGV转弯半径。
结合微分思想,经过一小段时间dt,AGV产生角度偏差dθ和位置偏差de:
由于AGV运动是连续的,对式(5)进行拉普拉斯变换:
所设计的AGV为双轮差速驱动,采用直流无刷电机控制,通过控制左右两驱动轮的速度可调节AGV运行的姿态(速度、位置及偏角等)。AGV的运行过程虽然为非线性,但其变化连续,且偏差较小,故可将AGV动态特性结构做小偏差线性化处理,以简化控制关系,近似得到控制系统的线性关系。构建AGV小偏差线性化控制框图,如图2所示。

图2 AGV小偏差线性化控制框图Fig.2 Small Deviation Iinearization Control Block Diagram of AGV
图中:ΔUo—左右轮电机电压差,由AGV控制框图可得到AGV传递函数为:
式中:Tm—电机响应时间常数。
3 改进模糊PID算法
模糊PID在常规PID的基础上引进模糊逻辑控制,有效解决了PID控制器参数自整定的问题,模糊PID相比于常规PID响应速度快,超调量小,达到稳定的时间短。然而在工业控制场合,系统经常受到外界干扰影响,在干扰来临时,模糊PID控制性能表现并不优良。针对工业控制对稳定性和实时性的要求,在分析PID参数对系统性能影响机理的基础上,对模糊PID进行改进,提升了系统的抗干扰性能。
3.1 积分分离
PID积分项的作用是对历史偏差的积累,以消除系统稳态误差。当系统瞬时偏差较大(如启停阶段,受干扰期间)时,积分项会将偏差较大的数据也累加,而这些偏差较大的数据对积分项而言属于“坏”数据,全部累加易造成误运算,使系统响应变慢,控制系统超调,延缓系统达到稳态的时间,严重则导致系统震荡。
在控制系统当前值离目标值较远时,减弱PID积分作用,反之则加强PID积分作用[8,9],但改进算法未考虑积分作用对控制系统实时性的不利影响,积分分离级数过多,会导致系统响应变慢,实时性降低;同时,各级积分分离系数的前提条件并不合适,特别在输入有干扰信号时,仅考虑偏差的大小来确定积分分离系数有失偏颇,当干扰信号较大时,会引起偏差的增大,但此时原始信号波动并不大,若仅因偏差较大而取消积分作用,容易引起误判。
因此设计两级积分分离,以偏差绝对值与输入信号绝对值的比值作为前提条件判断依据,在控制系统当前值离目标值较远时,积分分离系数取0,取消PID的积分作用,依靠PD计算来使控制系统当前值趋近目标值;当且仅当控制系统当前值在目标值附近某个可接受范围时,积分分离系数取1,引入积分作用,对当前一段时间的偏差进行积累,联合比例及微分共同作用,驱使控制系统快速响应,达到稳态,同时消除稳态误差。
考虑引进积分分离系数,将PID计算公式调整为:
式中:uk—第k次计算的输出值;kp—比例系数;ki—积分系数;kd—微分系数;β—积分分离系数;k—当前计算次数;n—最大计算次数;Ek—第k次计算目标值与实际值的偏差;SV—输入信号值;e—积分分离阈值。
3.2 不完全微分
PID微分项是对当前偏差和前一次偏差的作用,反映的是偏差的变化,因此具有预见性,可以提前对偏差做修正。微分控制可以适当克服波动,减小超调量,但过大会导致系统震荡。当系统存在干扰时,微分项相当于放大高频信号,会产生震荡。
在微分环节加入一阶惯性环节作滤波器,可对高频干扰起一定抑制作用[10,11],但采用恒定的滤波系数仅降低了对输入波动的灵敏性,无法真实反映原始输入信号的变化,笔者通过改进PID微分环节,以动态的滤波系数来匹配不同的输入信号阶段,达到降低干扰的同时保持原始输入信号的目的。
考虑到由于地面不平导致的AGV车身的抖动、振动等因素,造成控制系统输出信号波动较大,引入一阶惯性滤波算法[12]对传感器采集的数据进行处理。
式中:Y(m)—本次滤波输出值;α—滤波系数;X(m)—系统输入值;Y(m−1)—上次滤波输出值。
滤波处理后,可有效抑制干扰,使系统输出曲线变得平滑。滤波处理的平稳度和灵敏性由滤波系数决定,平稳度反映了系统抗干扰的能力,灵敏性反映了系统跟踪原始输入信号的能力。滤波系数a∈(0,1],a越小,滤波作用越强,平稳度越高,a越大,滤波作用越弱,灵敏性越高,当a取1时,输出直接跟踪输入,此时无滤波作用。
将滤波系数a调整为随输入信号变化的变量,可提升滤波作用的灵活性,调整公式如下:
式中:T—采样周期,取为10ms;Ek—输入偏差;l—调整系数,取为100。
一阶惯性滤波算法传递函数为:
式中:Tf—滤波时间常数。
由式(12)、式(13)可解得:
3.3 比例缩放
PID比例项是对当前返回的偏差作用,适当增大比例作用可以提高系统响应速度及调节精度,但比例作用引入了稳态误差,过度增大比例作用,会使系统输出超调量和稳态误差增大,严重时会使输出产生震荡。
以偏差及偏差的变化率为自变量线性调整比例系数[13],会将干扰信号的波动带到比例系数中,当输入波动不大时,可以改善比例作用,但当存在外界干扰,输入波动较大时,偏差及偏差的变化率较大,以此来调整比例系数,会导致比例系数变化较大,容易引起输出震荡,对控制系统的稳定性有不利影响。
因此,笔者忽略中间过程偏差及偏差变化率对比例系数的影响关系,直接对经模糊逻辑计算出的比例系数作适当调整,通过比例缩放来匹配不同比例作用强度与工况,以达到在抑制高频干扰的同时加快响应速度。
当高频干扰来临时,比例作用会增大震荡程度,因此当偏差偏离目标值过大时,缩小比例系数,抑制干扰;当偏差靠近目标值时,放大比例系数,加快系统响应。
在依模糊逻辑推算出PID比例系数后,对比例系数进行适当调整,调整公式如下形式:
式中:—调整后的比例系数;kp—调整前的比例系数;m—调整系数;kp0—比例系数基础值,取为0.35。
调整系数m依下式确定:
4 Simulink环境下仿真
4.1 系统性能评价指标
现场工作时,控制系统对稳定性和实时性的要求较高,经过干扰信号作用,控制系统输出会受到一定程度的影响,需对控制系统在干扰过程中的性能进行评估。
干扰过程中,首先关注系统动态响应特性。以累积绝对值偏差为指标[14]仅适用于输入没有干扰信号的情况,以方差为指标[15]衡量的是偏差围绕偏差均值上下波动的情况,无法反映输出围绕原始输入上下波动的情况。为此,笔者提出一种系统抗干扰性能的衡量指标J:
式中:T—采样时间;uk—第k次计算的输出值;xk—第k次计算的原始信号输入值;n—最大计算次数。
J值大小可以反映控制系统在干扰情况下围绕原始信号上下波动的程度,J值越大,控制系统输出波动越大,抗干扰性能越差,J值越小,控制系统输出波动越小,抗干扰性能越强。
同时,还需要关注系统稳态响应特性,即达到新稳态的时间(回复时间),稳态误差的大小,此特性反映了系统在干扰之后回归正常水平的速度与质量。
此外,为验证改进算法在抑制干扰的同时,不会对无干扰情况下的响应造成不利影响,还需衡量改进算法在无干扰情况下的响应特性,即在干扰来临前的超调量,达到稳态的时间。
4.2 模糊规则建立
构建2输入3输出模糊控制器,输入偏差为Ek、偏差变化率为ECk,输出比例系数变化值为Δkp、积分系数变化值为Δki、微分系数变化值为Δkd,输入输出模糊论域均设计为{NB,NM,NS,Z0,PS,PM,PB}7个模糊语言变量,分别代表{负大,负中,负小,零,正小,正中,正大},模糊论域范围取为[−6,6]。
当模糊控制器输入或输出不在模糊语言变量左右端点上时,采用三角形隶属度函数,以线性关系计算其隶属于左右端点的权重(即隶属度)。
绘制三角形隶属度函数曲线,如图3所示。

图3 三角形隶属度函数曲线图Fig.3 Graph of Triangular Membership Function
采用加权平均法对模糊输出量进行清晰化处理,其表达式为:
式中:z0—模糊控制器输出量解模糊后的精确值;zi—模糊论域内的值;η(z)i—zi的隶属度;I—总隶属度个数。
构建模糊控制规则表,如表1所示。

表1 模糊控制规则表Tab.1 Fuzzy Control Rules Table
4.3 仿真模型搭建
在simulink环境下搭建PID算法仿真模型,如图4所示。分别设计常规PID、模糊PID及改进模糊PID 3个计算模块,以阶跃响应为输入,以(0.2s+1)(/2s2+10s)作为被控双轮差速AGV 的传递函数。

图4 干扰下PID算法仿真模型Fig.4 Simulation Model of PID Algorithm under Disturbance
模糊控制器前端,输入偏差Ek及偏差变化率ECk实际论域映射到模糊论域的量化因子kE=60、kEC=30。
模糊控制器后端,输出Dkp、Dki、Dkd模糊论域映射到实际论域的比例因子kDkp=0.6、kDki=2.5、kDkd=3。
模糊控制器设计为2输入3输出模块,以表1所示的模糊规则作为模糊控制的逻辑语言,共有7×7=49条逻辑;模糊控制器最终输出比例、积分、微分系数变化值,经模糊论域到实际论域的映射后再加上初始值即可得到比例、积分、微分系数。
所提出的算法改进部分,比例缩放、不完全微分及积分分离以布尔逻辑方式进行条件判断,将结果加到模糊控制器输出的比例、积分、微分系数上,将比例项、积分项及微分项相加,完成PID控制算法的计算,计算结果作用于传递函数上。其中积分分离阈值e取为0.1。
同时,运用时钟模块在指定时间段内将干扰信号加入输入端,构成外界干扰对控制系统影响的模型。经传递函数计算的输出反馈到输入,形参闭环控制系统。
在第(10~13)s引入一脉冲干扰,得到3种PID算法的响应特性,如图5所示。

图5 脉冲干扰下PID算法响应曲线Fig.5 Response Curve of PID Algorithm under Impulse Interference
3种PID算法在脉冲干扰下的性能指标,如表2所示。

表2 脉冲干扰下PID算法性能指标对比Tab.2 Comparison of Performance Indexes of PID Algorithm under Pulse Interference
由图5和表2可以看出,在脉冲干扰期间,常规PID已经无法正常工作,模糊PID受干扰时其输出偏离目标值较大,且达到新稳态时有一定的波动,干扰结束后回归目标值所需时间较长,改进模糊PID在干扰期间波动较小,偏离目标值小,干扰结束后能更快回归目标值,响应速度更快,在脉冲干扰情况下表现更优良。
在第(10~15)s引入一高斯白噪声干扰,得到3种算法的响应特性,如图6所示。
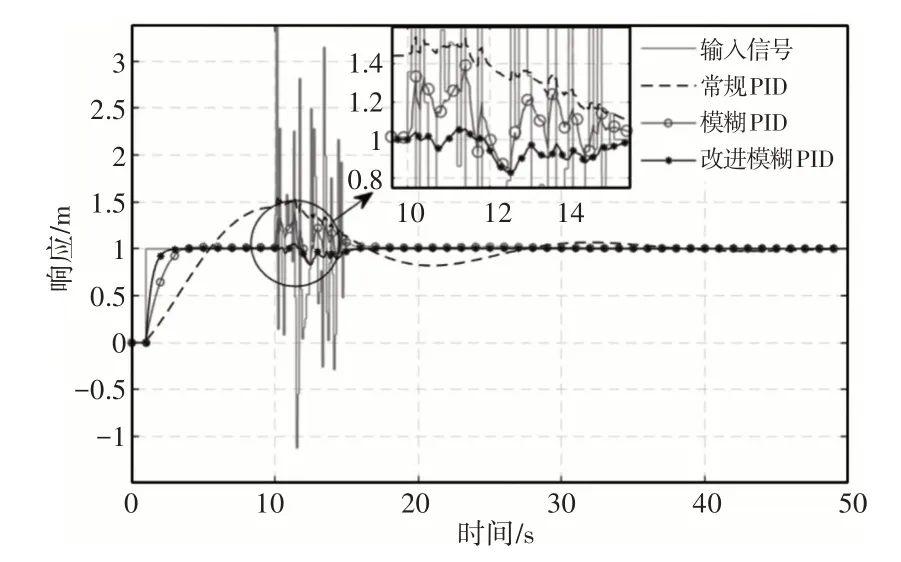
图6 白噪声干扰下PID算法响应曲线Fig.6 Response Curve of PID Algorithm under White Noise Interference
3 种PID 算法在高斯白噪声干扰下的性能指标,如表3 所示。由图6 和表3 可以看出,在高斯白噪声干扰期间,常规PID受干扰的影响最大,模糊PID 输出震荡程度较常规PID 有所减弱,但波动依然较大,改进模糊PID 在干扰期间波动较小,而且响应速度更快。

表3 白噪声干扰下PID算法性能指标对比Tab.3 Comparison of Performance Indexes of PID Algorithm under White Noise
5 结论
以AGV为控制对象,借助PID算法与模糊算法控制策略,提出了一种改进模糊PID 算法,运用Simulink进行仿真,分析了改进算法前后系统性能的差别。就改进算法的优化过程和结果分析得出以下结论:
(1)建立AGV数学模型,从运动学的角度对AGV进行分析,在假设条件下得出双轮差速AGV传递函数,为控制对象的仿真提供理论基础。
(2)对比常规PID,模糊PID,和改进模糊PID算法在脉冲干扰、白噪声干扰下的响应性能,改进模糊PID可以有效抑制高频干扰,稳定系统性能。
(3)所提出的系统性能评价指标,考虑了在时域上响应的偏差和原始输入信号的关系,可有效衡量系统在有干扰情况下围绕原始输入信号下波动的情况。
猜你喜欢
大电机技术(2022年3期)2022-08-06
核科学与工程(2021年4期)2022-01-12
数学物理学报(2021年2期)2021-06-09
煤气与热力(2021年4期)2021-06-09
电子产品世界(2021年5期)2021-02-09
中华戏曲(2020年1期)2020-02-12
数学物理学报(2019年5期)2019-11-29
广东技术师范大学学报(2016年5期)2016-08-22
哈尔滨师范大学自然科学学报(2015年1期)2015-04-19
浙江中西医结合杂志(2013年4期)2013-11-08
