水陆两栖仿生机器人的研究及应用
2023-03-18 02:32:24徐小军刘博龙潘迪博鲁兴举
水下无人系统学报 2023年1期
徐小军,刘博龙,潘迪博,鲁兴举
(国防科技大学 智能科学学院,湖南 长沙,410073)
0 引言
随着人类对江河湖海的探索和开发,水陆两栖机器人逐渐得到广泛的关注。水陆两栖机器人具备在陆上和水上运动的能力,并且在水陆交界处的复杂环境中也能够顺利通行,这大大拓展了其工作范围和执行任务的能力。目前,水陆两栖机器人在资源探测、灾后救援、巡检维修、军事侦察等领域的应用价值已经得到了充分的论证[1]。
两栖仿生机器人技术代表着两栖机器人中常见的一种设计思路,即从自然界中去寻找灵感。在自然界中天然存在着众多两栖动物,如螃蟹、虾、乌龟、青蛙等,它们的身体结构和运动方式为科学家们提供了设计灵感,从而产生了众多奇思妙想的两栖仿生机器人[2]。
传统的两栖机器人多采用轮式运动机构加螺旋桨或喷泵的组合形式,具有成熟、可靠、高效的优势,但与此相对应的是受地形环境限制大,在复杂陌生的环境和特定的工作场合中难以发挥有效作用。相比于传统的陆上和水上驱动方式,两栖仿生机器人的运动模式更为丰富和灵活,这为复杂环境下执行两栖任务提供了更多的研究路径[3]。目前,两栖仿生机器人已经在管道检测、水域探查、生物观测等领域发挥了重要作用。未来,随着相关技术的日益成熟,仿生机构的可靠性和效率进一步提升,两栖仿生机器人将会在军事、农业和工业等领域得到更广泛的应用[4-5]。
对于两栖仿生机器人的研究,根据借鉴程度不同,可分为模仿运动模式类和模仿运动结构类[6]。前者是根据观察到的两栖动物运动模式,设计出具有类似运动功能的机器人,如蛇形、青蛙形和龟形机器人等。后者是从不限于两栖类的动物身上获取的结构设计灵感,并运用在两栖机器人上,使得机器人的一部分结构具备仿生的功能,典型的设计有腿式、鳍式和软体机器人等。
1 模仿运动模式类两栖仿生机器人
两栖动物天生具备对水陆环境的适应能力,漫长的自然选择过程使其抛弃冗余的结构和功能,保留下来最高效的运动模式。因此,对两栖动物的研究、学习和模仿能够极大地拓展研究人员的思路,促进对两栖运动模式的理解,进而推动两栖机器人的研究。下面根据两栖仿生机器人不同的仿生对象分别加以介绍。
1.1 仿蛇形两栖机器人
蛇类能够在各种崎岖复杂的地形上运动,并且能够依靠自身的柔体结构实现水中的波动前进,常被作为仿生机器人的参考对象[7-8]。
日本东京大学研究仿蛇形机器人的历史较长,得益于在微型驱动电机和控制方面的技术积累,其对模块化蛇类机器人结构具有更深入理解[9]。通过分析蛇类蠕动的受力可得,其身体在偏离运动方向角度最大处产生的推进力最大,如图1[10]所示。
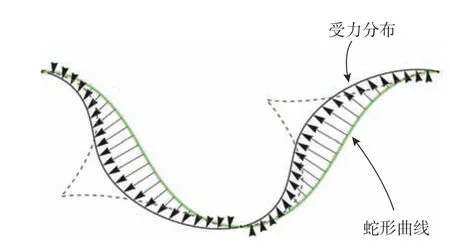
图1 仿蛇形机器人法向力分布Fig.1 Normal force distribution of snake-like robot
通过控制蛇形机器人不同区段的接地程度,可以更好地控制其驱动力集中。以此为基本运动模式,开发出世界上第1 个仿蛇类运动原理机器人ACM-Ⅲ[10],如 图2 所 示。该 机 器 人全长2 m,质量28 kg,由20 个模块连接而成,各个模块间能够绕垂直轴产生摆动运动,在陆上的速度能够达到0.5 m/s。
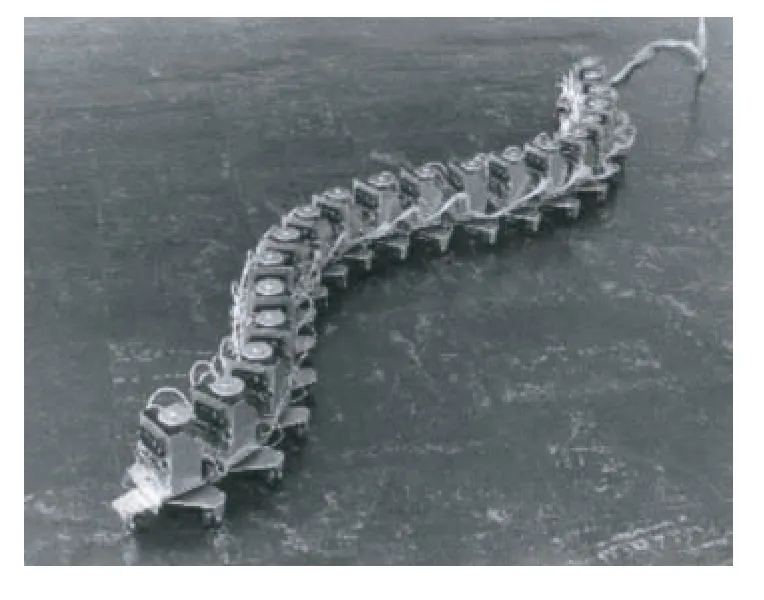
图2 ACM-Ⅲ仿蛇形机器人Fig.2 ACM-III snake-like robot
随后,该团队在2005 年设计并研制了一款仿蛇类运动的两栖移动机器人ACM-R5[11-12]。该仿蛇机器人由多个关节模块构成,每个模块都有独立的控制和运动能力,能够根据需要增减模块的数量。机器人的每个关节模块能够实现横向和纵向2 个方向的摆动,且无论在地面上还是水下都能以相同的方式推进,即依靠不同关节的自由度来实现波动前进。其结构如图3 所示。

图3 ACM-R5 仿蛇形两栖机器人Fig.3 ACM-R5 amphibious snake-like robot
瑞士联邦理工学院也设计了AmphiBot 系列仿蛇形两栖机器人[13],如图4 所示。该系列机器人同样采用波动推进的方式前进,能够在水中游动和在地面上横向波动移动。但受限于关节自由度只有1 个,无法实现上浮、下潜和翻滚运动。

图4 AmphiBot 仿蛇形两栖机器人Fig.4 AmphiBot amphibious snake-like robot
国内在仿生蛇形机器人研究领域也取得不小的进展。国防科技大学2001 年研制成功我国第1 台蛇形机器人[14],如图5 所示。该机器人长1.2 m,直径0.06 m,质量1.8 kg,能够通过波动的方式移动,并可穿越直径10 cm 的管道。该机器人最大陆地运动速度20 m/min,其表面附加有防水层,能够下潜到水下50 m 工作。

图5 国防科技大学仿蛇形两栖机器人Fig.5 Amphibious snake-like robot of National University of Defense Technology
北京理工大学研制了一款自主柔性的两栖蛇形机器人[7],如图6 所示。该机器人长10.7 cm,直径7 cm,质量8 kg,陆上前进速度0.5 m/s。机器人搭载的单目视觉识别系统和惯性测量单元能够实现高精度的路径跟踪和自主控制。

图6 北京理工大学仿蛇形两栖机器人Fig.6 Amphibious snake-like robot of Beijing Institute of Technology
中科院沈阳自动化研究所研制了一款名为“Perambulator”的两栖机器人[15],如图7 所示,它由9 个密封的万向运动模块组成,与ACM-R5 一样具有横向和纵向2 个方向摆动的自由度。机器人外侧还设置了8 个一体式轮桨机构作为运动辅助,提高了机器人的运动效率。该机器人还能够实现S 形翻滚、螺旋翻滚等三维运动。

图7 Perambulator 仿蛇形两栖机器人Fig.7 Perambulator amphibious snake-like robot
仿蛇形机器人是模仿运动模式类机器人中研究较多,技术也比较成熟,其应用场景大多为灾难搜救。仿蛇形机器人技术关键在于多模块的结构设计和协同控制,相对柔性的结构使其能够在复杂、狭小区域执行探测搜救任务,但这种结构也限制了其负载能力和移动速度。
1.2 仿青蛙两栖机器人
青蛙是常见的两栖动物之一,其在水下和陆上都具有优异的运动能力。青蛙的水上泳姿能够使其不费力地长时间运动,而其陆上的跳跃功能为其带来了强大的越障能力。
北京理工大学的研究团队通过观察青蛙在水陆环境中的运动模式,研制了一款仿青蛙形水陆两栖机器人FroBot[16-17],如图8 所示。该机器人的主要运动机构为摆腿结构。在陆上时,摆腿结构配合万向轮前进,车轮的交叉摆动提供了向前的推力,如图9 所示。在水中时,摆腿结构带动柔性的尾鳍驱动机器人前进,通过尾鳍与水流的相互作用提供向前的推力,如图10 所示。机器人首部的胸鳍能够实现水下的俯仰和翻滚运动,前舵轮能够实现陆上转向。其陆上最大速度可达1 m/s,水上最大速度可达0.4 m/s。

图8 北京理工大学FroBot 两栖机器人Fig.8 Amphibious FroBot robot of Beijing Institute of Technology
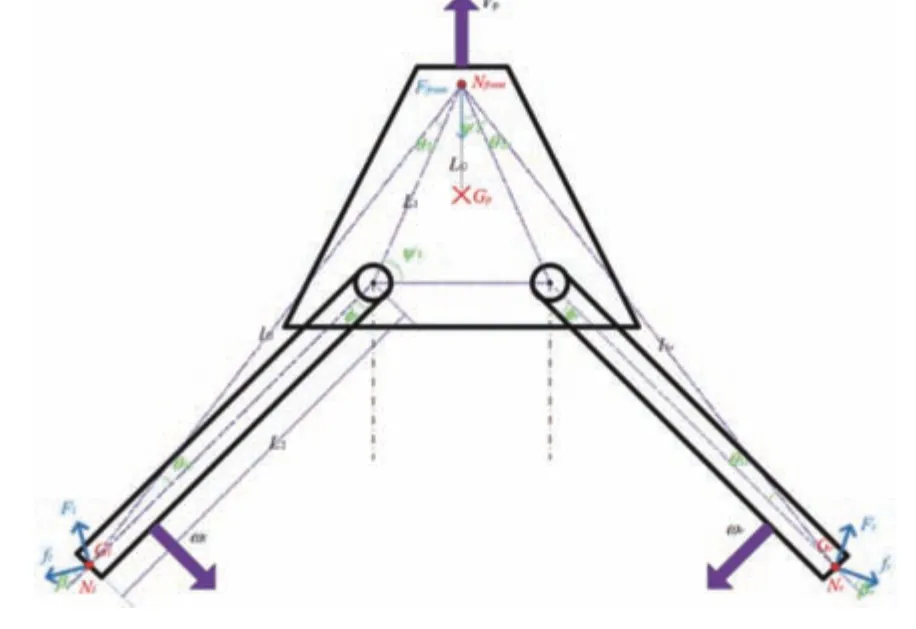
图9 FroBot 两栖机器人陆上运动受力分析Fig.9 Force analysis of FroBot on land motion
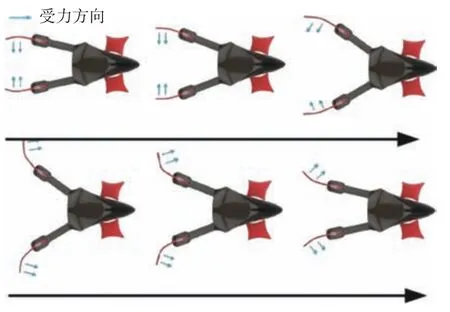
图10 FroBot 两栖机器人水中运动受力分析Fig.10 Force analysis of the FroBot in water motion
哈尔滨工业大学研制的仿青蛙机器人具有更灵活的控制结构[18],如图11(a)所示。该机器人躯干相对扁平,起到减小阻力的作用;腿部采用三连杆机构,相比于Frobot 更接近真实的青蛙腿部,如图11(b)所示。通过内置的小型气泵和储气瓶驱动仿青蛙机器人的腿部伸展与收缩,调整髋关节、膝关节和踝关节处的气阀,从而有效控制腿部的运动轨迹。机器人在水中的最大游动速度达到0.67 m/s,能够依靠两腿的差速实现水中转向。
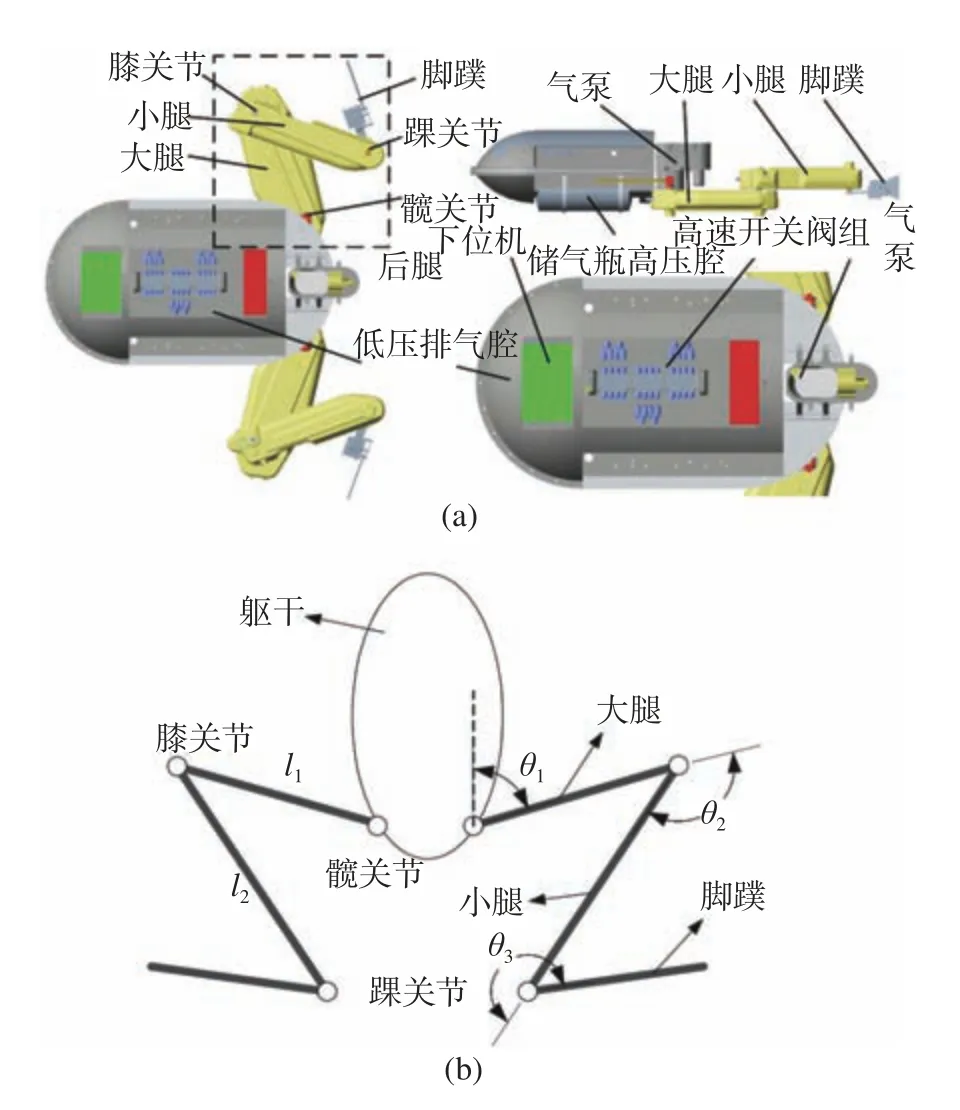
图11 哈尔滨工业大学仿青蛙机器人Fig.11 Bionic frog robot of Harbin Institute of Technology
仿青蛙机器人的难点在于腿部结构和驱动模式的设计,其在水中的运动较为隐蔽,具备一定的负载能力,但陆上的跳跃功能较难实现。
1.3 仿乌龟两栖机器人
乌龟是最古老的两栖动物之一,它在漫长的进化中发展出了集陆上水中运动于一体的运动结构,对乌龟的模仿持续了相当长的时间[19]。世界上公认最早的移动机器人就是诞生于1949 年的一对机械龟EImer 和Elisel,但受技术水平限制,在之后很长一段时间内对乌龟运动模式的模仿尚不充分。
美国耶鲁大学最近研制出了一款仿乌龟形水陆两栖机器人ART[20],如图12 所示。该机器人结合了海龟和陆龟的结构特点,具有可变形的四肢,能够根据环境调整四肢的形态和刚度。当机器人在陆上运动时,四肢顶端可弯曲成足式结构,能够以各种步态在陆上行走;而当机器人处于水中时,其四肢变成鳍状,能够以类似海龟的水上泳姿移动。机器人在肩部关节处设有3 个马达,可以进行灵活的调整,实现水陆多种运动模式。

图12 两栖仿生龟ARTFig.12 Amphibious turtle robot ART
除了仿生龟以外,还有大量基于仿生爬行动物的两栖爬行机器人,能够在陆上和水下爬行。如瑞士洛桑联邦理工学院研制的仿蝾螈两栖机器人Salamandra robotica II[21](图13(a))、美国波士顿东北大学研制的仿龙虾机器人Lobster[22-23](图13(b))、韩国海洋科学技术院研发的仿螃蟹机器人Crabster[24](图13(c))及中国科学院大学研发的仿海星两栖机器人[25](图13(d))等。这些机器人能够在陆上和水底执行作业任务,但无法在水中游泳。

图13 仿生两栖爬行机器人Fig.13 Amphibious bionic crawling robots
2 模仿运动结构类两栖仿生机器人
除了模仿两栖类动物运动模式外,借鉴自然界生物运动结构,并将其应用于两栖机器人设计,也是常见的仿生学研究手段。典型的模仿对象有动物的腿足结构、鱼鳍结构和软体驱动结构。
2.1 仿腿足结构两栖机器人
模仿腿足结构的两栖机器人除了前文提到的单一腿式结构以外,还有将腿足结构和轮桨等结构复合设计的多运动模式机器人。如哈尔滨工程大学的足桨式多模态两栖机器人[26],如图14 所示。该机器人凭借足桨复合机构和可变形关节,能够在岸滩和水中快速移动。在奔跑模式下,机器人的机体可以在变形驱动关节的控制下展平,电机切换为高力矩模式,机器人依靠足部的推进能力实现机动;在水中游动模式下,机体折叠,螺旋桨角度调整为斜向上,电机切换为高速模式,驱动螺旋桨快速转动提供水中动力。

图14 足桨式多模态两栖机器人Fig.14 Foot-propeller multimode amphibious robot
中国科学院沈阳自动化研究所研制的轮-桨-腿一体化两栖机器人同样具备陆上爬行和水中游泳2 种运动模式[27],如图15 所示。机器人的中间设有2 个侧板驱动装置,在陆上爬行模式下,侧板可以作为爬行腿,辅助越障;在水中游泳模式下,侧板可以作为方向舵,控制机器人俯仰运动。机器人的陆上最大爬行速度为1 m/s,水中最大航速为0.7 kn,最大下潜深度10 m。
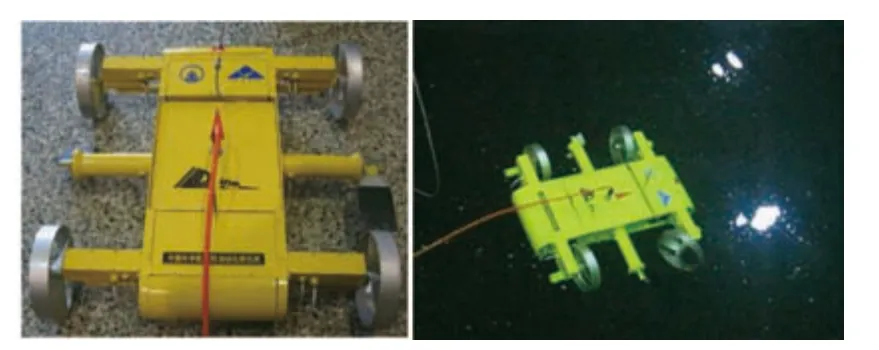
图15 轮-桨-腿一体化两栖机器人Fig.15 Wheel-propeller-leg amphibious robot
国防科技大学的研究团队将轮腿2 种运动结构相融合,设计出了一款可变构型两栖仿生机器人[28-29],如图16 所示。该机器人将轮式、腿式和螺旋桨运动结构高度集成并实现了动力复用,能够在水陆2 种工作模式下高效切换。该机器人不仅能在水陆工况下高速机动,还具备陆上的腿式越障和蛙式跳跃入水功能。

图16 变构型两栖仿生机器人Fig.16 Variant configuration amphibious bionic robot
此外,球形两栖仿生机器人也多采用腿式或轮式与喷水推进相结合的方式实现机动,这类机器人具有体型小、透明性高、隐蔽性好、机动灵活的特点,在两栖侦察、海底探测以及深海科考等领域具有一定的应用价值[30-31]。
2.2 仿鱼鳍结构两栖机器人
研究者们对于仿生鱼的研究已经持续了数十年的时间,美国麻省理工学院早在1994 年便研制出来第一条仿生金枪鱼Robotuna,之后在仿生机器鱼领域国内外均有大量成果涌现。2004 年,美国加州理工学院通过研究电鳗的鳍部结构,提出了一种仿生波动鳍的设计思路[32],能够在水中依靠长波动鳍的规律性起伏提供动力。2015 年,美国海军实验局联合Pliant Energy Systems 公司共同开发的两栖机器人Velox 采用了波动鳍的设计[33],将波动鳍的适用范围拓展到了陆地上。Velox 两侧设有1 对波动鳍,能够凭借鳍的起伏运动在水中和陆上移动,如图17 所示。
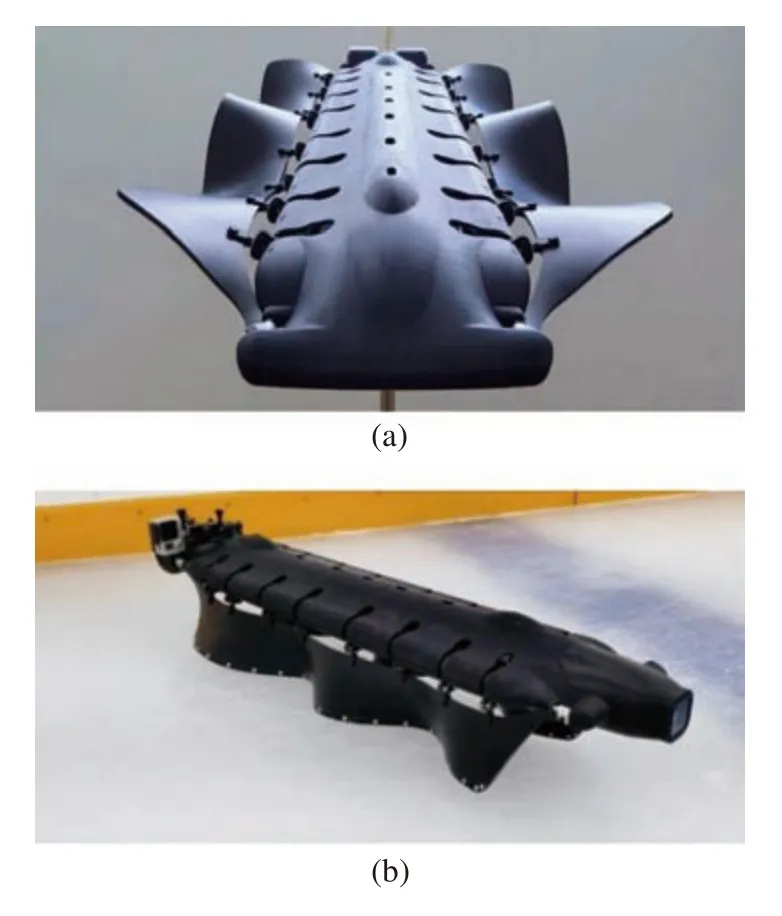
图17 Velox 两栖机器人Fig.17 Velox amphibious robot
目前,国内的国防科技大学[34]、中国科学院大学[35]以及西安交通大学[33]等相关研究机构均对此类构型开展了研究。
2.3 仿软体结构两栖机器人
随着软体驱动技术的小型化和智能化,其在两栖仿生机器人领域的应用也日益成熟。仿生软体结构可以实现类似肌肉的驱动,更精确地模拟软体生物的行为。北京大学的研究团队利用3D 打印技术设计了一种两栖机器人的仿生驱动关节[36],如图18 所示。仿生关节由2 个气囊组成,气囊间的连接用于模拟关节运动,能够通过输入电压力的变化来控制关节的三维运动。
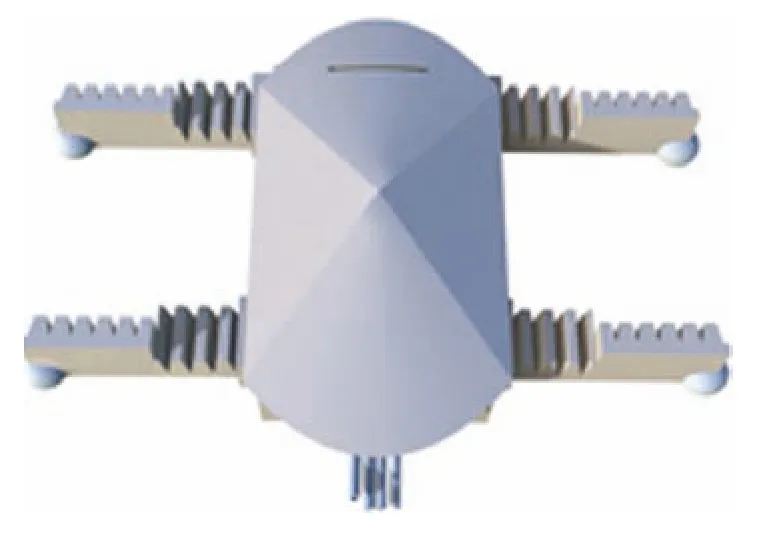
图18 受乌龟启发的软体两栖机器人Fig.18 A tortoise-inspired soft-amphibious robot
东京工业大学的研究团队基于McKibben 型气动驱动器设计了一种软体两栖爬行机器人的运动机构[37],如图19 所示。该机器人的运动机构由16 个McKibben 型气动驱动器组成,每个腿部结构包含3 个驱动器,身躯由4 个驱动器控制,腿部和身躯的姿态通过不同的驱动器组操控。该机器人能够在陆上爬行并在水中以类似鳗鱼的方式移动。

图19 基于McKibben 驱动器的软体两栖机器人Fig.19 Soft-amphibious robot using McKibben actuator
美国坦普尔大学研制的气动软体两栖攀爬机器人能够在地面和水下爬行[38],如图20 所示。机器人以蠕动方式在物体表面移动,两端的软附着力吸盘能够形成可控的腔内负压,在陆上和水下的垂直壁面上有效吸附。

图20 软体两栖攀爬机器人Fig.20 Soft-amphibious climbing robot
此外,形状记忆合金也被用于制作两栖仿生机器人的柔性驱动结构,美国伊利诺伊大学和韩国汉阳大学研究团队利用形状记忆合金制作了一款模仿海豹运动的两栖仿生机器人肌肉驱动机构[39],如图21 所示。该机器人陆上每步能够前进20.1 mm,水下移动速度达到18.8 mm/s。

图21 基于形状记忆合金的软体两栖机器人Fig.21 Shape memory alloy-based soft amphibious robot
相比于模仿运动模式类两栖仿生机器人,模仿运动结构的设计更加灵活和高效,抛弃冗余设计,将多种运动模式结合,为仿生机构领域提供了更多的新思路。
3 水陆两栖仿生机器人技术优势
随着无人平台技术的快速迭代和不断升级,其在复杂环境下执行任务的效果相较于人类具有更加明显的优势。具体优势表现为以下几点:
1) 降低作业人员面临的风险,减少人员伤亡。两栖仿生机器人的作业任务都是在比较恶劣的环境条件下进行的,地形复杂、涉水较深,人员难以活动且容易出现伤亡。两栖仿生机器人可由人员在远处遥控或自主执行任务,从而有效避免人员直接接触危险源,降低了风险。
2) 适应复杂作业环境,具备高效的越障和跨域机动能力。两栖仿生机器人能够根据作业环境的需要针对性地进行结构和功能设计,不同的仿生行动结构设计能够为机器人带来不同的涉水能力和陆上通行能力,提高机器人的越障能力和跨域机动能力。
3) 生产周期和成本可控,能够大批量生产。机器人的优势在于大批量生产的情况下成本可控。目前的两栖仿生机器人多处于实验室研究阶段,成本难以估计和控制,但只要技术成熟且应用前景可观,即可转化生产、压缩生产成本,从而进一步促进机器人的推广应用。
4) 平台接口模块化,可搭载不同任务载荷,执行多样化任务。两栖仿生机器人在设计生产阶段可以预留出通用的模块化接口,搭载不同的探测设备和任务执行设备,使其具备侦察、探测、搜救及巡检等多样化任务的执行能力。
4 水陆两栖仿生机器人应用场景
水陆两栖仿生机器人具备跨域的灵活机动能力,能够在复杂环境下完成侦察、探测、救援等危险任务,在军事和民用领域都具有广阔的应用。以下列举4 种典型的应用场景。
1) 隐蔽侦察
水陆两栖仿生机器人多采用仿生学的水下和陆上移动方式,具有低噪声、隐身性好的特点,适合用来隐蔽侦察。在对目标登陆地点的侦察行动中,两栖仿生机器人可在远离岸边的水域由舰艇或者潜艇释放,保持水中运动模式推进至岸滩。上岸后,机器人根据需要切换为陆上运动模式,仿生地面推进方式可以为两栖机器人提供更强大的越障能力。在抵达目标区域后,机器人可以通过搭载的探测设备对周围区域进行侦察探测,并将收集到的信息回传给指挥控制平台。完成任务后,机器人可以返回释放点或潜伏下水等待回收。
2) 特种突袭
在现代化的战争模式中,特种突袭成为毁伤敌方作战装备,打击敌方有生力量的重要方式。以目前正在进行的俄乌战争为例,单兵携行武器和小型无人装备的突袭往往能够对大型的敌方装甲车辆和武器设施造成毁灭性的打击。因此大力发展小型无人化突袭机器人,能够在战场上起到以小博大的效果。水陆两栖仿生机器人能够设计成一次性使用的突袭装备,搭载爆破装备和引导打击装置。依靠其隐蔽性和小型化特性潜入目标对象附近后,引爆身上的炸药打击敌方设施,或可由激光制导设备引导后方火力覆盖摧毁目标。
3) 自主岸防
我国海岸线漫长,海岛众多,存在大量遗留的海岛争端问题。为了更好地守护我国的领土和领海,需要大量的先进两栖设备来加强岸防力量。水陆两栖仿生机器人能够在岸边和近岸水域巡逻,弥补了巡逻值守人力不足的问题。仿生结构设计如波浪鳍结构能够让机器人以更少的能耗完成移动,适用于长期定域巡航;腿桨式结构仿生机器人拥有更快的移动速度,适用于快速响应紧急情况。在恶劣天气和海况下,仿生两栖机器人具备更强的生存和值守能力,相比于人力巡逻和空中巡航而言具有更广泛的环境适应性。
4) 应急救援
在地震、洪水等自然灾害中,复杂的地形环境和水障碍往往成为阻碍救援任务进行的关键,需要耗费宝贵的救援时间来开辟道路。两栖仿生机器人能够凭借其强大的越障能力和涉水能力穿越复杂的地形环境,在受灾地区执行探测、救援、物资运输等任务。仿蛇形机器人具有穿越狭小空间的能力,能够在狭小通道内穿行,更为高效地感知救援环境和被困人员的状态,丰富救援手段。
5 结束语
水陆两栖仿生机器人遵循从自然界中获取灵感的机器人设计思路,拥有多样化的结构和功能。文中将其分为模仿运动模式类和模仿运动结构类。前者的运动模式更加成熟和稳定,能够执行特殊条件下的任务,功能的针对性更强;后者的结构功能更加灵活可控,可扩展性较好,在复杂地形环境下的适应性更强。
目前,由于设计、制造、控制等方面的限制,水陆两栖机器人的研究还处于实验室试制阶段,无法形成量产应用。因此,未来需要在结构、材料、控制架构等方面深入探索,实现关键技术的突破,为水陆两栖仿生机器人的大规模量产和推广应用打下良好的理论和工程基础。
猜你喜欢
军事文摘(2024年4期)2024-01-09 09:07:58
军事文摘(2021年18期)2021-12-02 01:27:58
国画家(2021年4期)2021-10-13 07:32:06
上海交通大学学报(2021年2期)2021-03-02 10:17:22
军事文摘(2020年24期)2020-11-29 06:35:54
中国特种设备安全(2018年10期)2018-12-18 02:17:18
电站辅机(2017年3期)2018-01-31 01:46:38
金色年华(2017年13期)2017-04-04 02:55:52
青少年科技博览(中学版)(2017年1期)2017-03-02 06:19:16
现代企业(2015年6期)2015-02-28 18:51:56