水下仿生侧线感知研究进展
2023-03-18 01:51:10翟宇凡熊明磊谢广明
水下无人系统学报 2023年1期
翟宇凡 ,熊明磊 ,王 晨 ,谢广明 ,3*
(1.北京大学 工学院 智能仿生设计实验室,北京,100871;2.北京大学 软件工程国家工程研究中心,北京,100871;3.北京大学 海洋研究院,北京,100871)
0 引言
作为海洋大国,我国拥有丰富的海洋资源。自从党的十八大报告中提出“建设海洋强国”战略需求以来,国内海洋装备发展获得前所未有的重视,特别是针对水下机器人的研究变得非常活跃。
随着先进制造与人工智能技术的飞速发展,机器人可以完成越来越多的陆地工程任务,例如路径规划、自主巡航、资源探测与开采、群体协作等。相比之下,水下机器人面临着极端复杂的工作环境,如复杂的水流运动与水底结构、高压环境、低能见度、海水的腐蚀性以及对仪器设备的干扰等,因此,发展水下机器人的难度远高于陆地机器人。一方面,水下机器人无法凭借简单的探测工具获取周围水环境信息;另一方面,对机器人的运动控制也会受到水流的巨大干扰。这些都是在海洋探索与开发过程中亟待解决的问题。
仿生机器人学是近年来的热点研究问题之一。自然界中动植物的生理结构或行为特征能够为研究人员设计机器人提供灵感。鱼类在海洋中生活了数十亿年,他们的身体结构不断进化,行为不断地适应着复杂的水下环境,最终呈现出如今的形态。在运动方面,鱼类的游动具有机动性高、推进效率高、能量效率高等特征。在感知方面,水生生物特有的一种感知器官——侧线能够帮助它们获取水下的压强与流速信息,进而由神经系统进行行为决策。
以墨西哥盲鱼为例(见图1),它们长期生活于黑暗的水下洞穴环境中,视觉系统退化,但是仍然能够凭借侧线以及其他感官系统实现捕食等行为[1]。受此启发,为了应对水下环境中声呐传感器的散射和多路径传播、光学传感器在黑暗浑浊的海洋环境中的失明等问题[2],研究者们开发了由一系列传感器组成的人工侧线系统作为新型传感系统,用于水下探测。相比于感知远场声波的声呐系统,人工侧线系统主要用于感知近场产生的局部流动,能够弥补声呐在近距离感知上的盲区。此外,随着隐身技术的不断发展,常规的传感系统存在失效问题[3],而水下物体运动产生的流场变化几乎是不可消除的,人工侧线系统对于反隐身技术的发展有着重要意义。为了进一步提升人工侧线系统的性能,完成各种各样的水下任务,研究人员以仿生机器鱼作为人工侧线系统的载体,进行了一系列感知、控制实验。文中以水下仿生侧线感知为主题,综述国内外研究现状,并介绍笔者团队在此领域的研究成果。

图1 墨西哥盲鱼Fig.1 Mexican blind fish
1 真实鱼类侧线感官
侧线是水生生物皮肤感官中最高度分化的组织结构,能够帮助生物在水下黑暗环境中感知压强与速度信息,获取周围环境特征,实现捕食、集群等行为[4]。侧线主要通过神经丘感受外界刺激,具体而言可以分为2 类: 表面神经丘和管道神经丘[5]。这2 种神经丘有着不同的生理结构,且经过亿万年的进化,在鱼体表面呈现出各自特定的数目与分布特征(见图2[6]),能够获取不同类型的环境信息,帮助生物体达到最好的感知效果[7]。
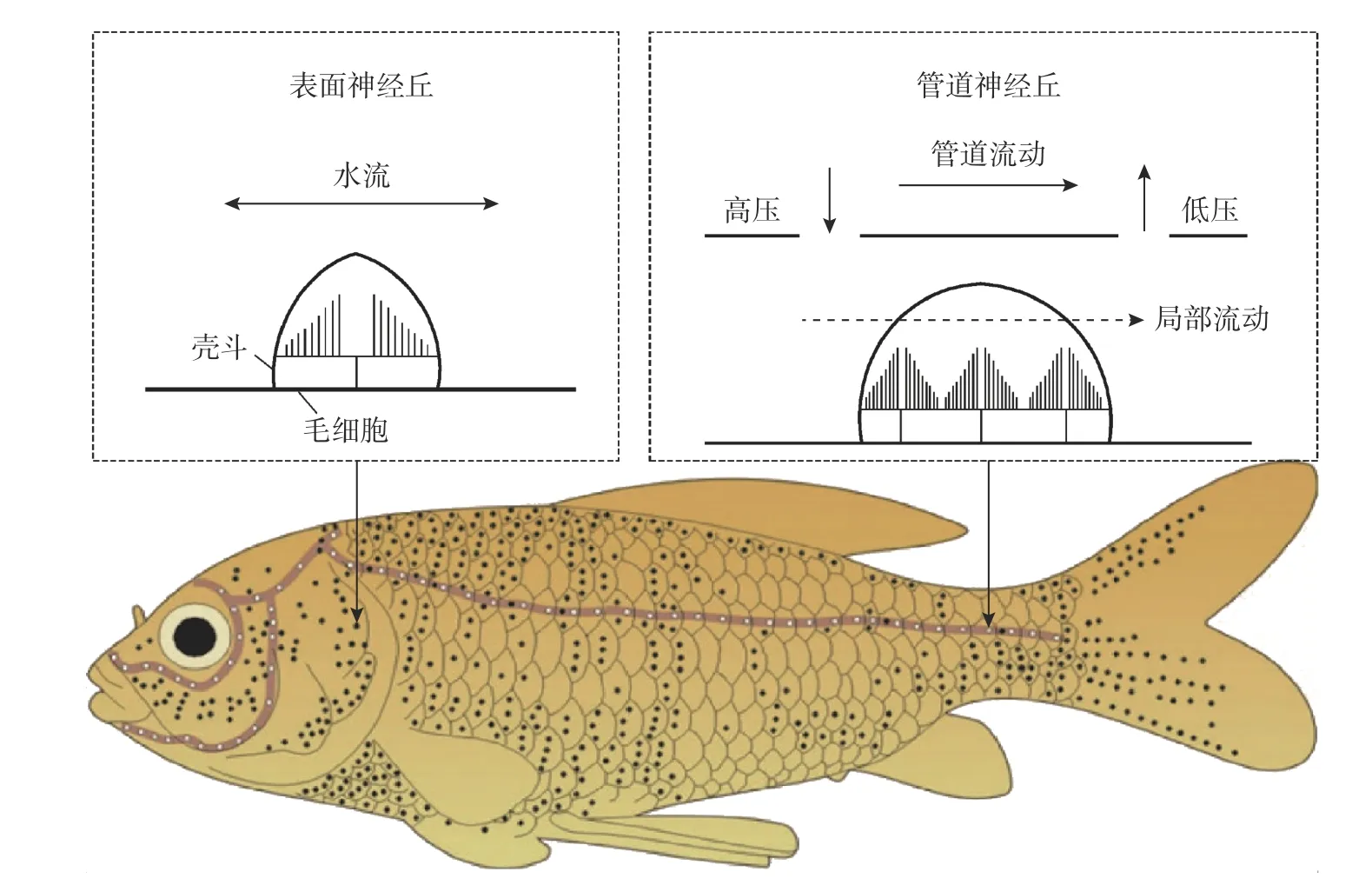
图2 鱼类侧线神经丘结构与分布Fig.2 Structure and distribution of the neuromasts of the real fish lateral line
表面神经丘位于皮肤表面,具有一定的凸起结构,数目较多且较为分散,能够帮助鱼类感知水流流向与流速[8]。在物理模型中,表面神经丘可以表示为2 段首尾相连且弯曲刚度不同的梁(见图3[9])。当生物体游动时,表面神经丘的梁结构在流速为U∞的水流作用下,沿z轴发生弯曲,挠度为v(z),位于皮肤下方的神经丘产生相应的神经冲动,进而传递到中枢神经系统进行处理,得到关于水流速度与方向的信息。表面神经丘灵敏度由挠度v(z)与水流速度U∞的相对大小关系决定[9]。
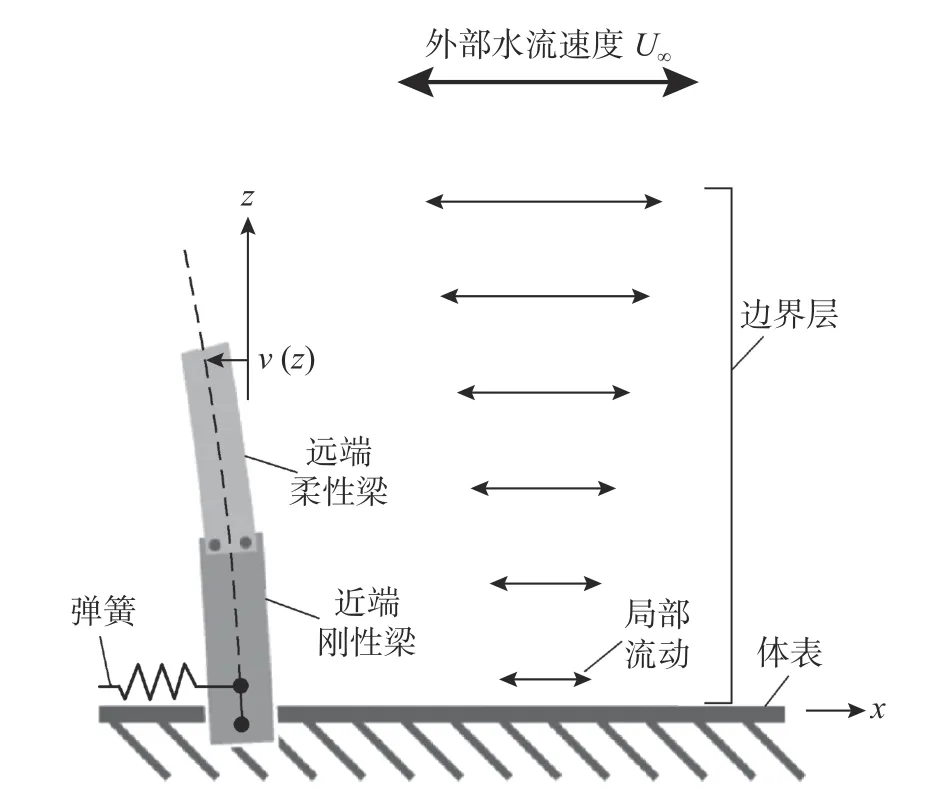
图3 表面神经丘简化物理模型Fig.3 Simplified physical model of superficial neuromast
管道神经丘在体表一般呈直线分布,位于表皮下的侧线管中,侧线管内充满着粘液,并且与外界水环境通过小孔相通,能够帮助鱼类感知水下的压强梯度[10]。具体的感知机理为: 外部流场的压强差p1−p2通过小孔传递到侧线管中,引起侧线管中的局部流动,从而触发管道神经丘产生神经冲动[11](见图4[2])。
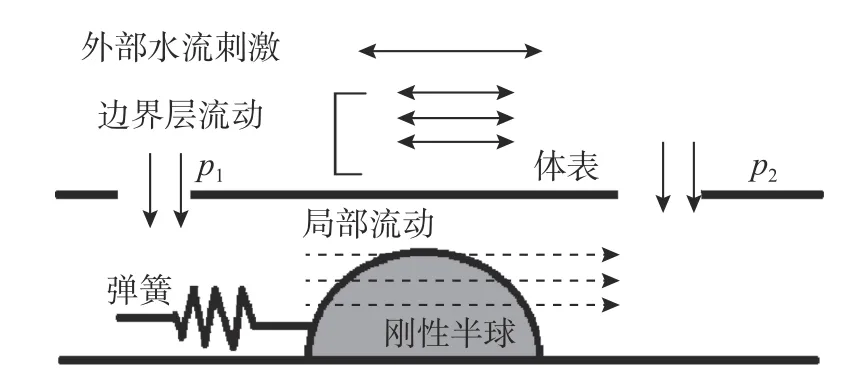
图4 管道神经丘简化物理模型Fig.4 Simplified physical model of canal neuromast
在这2 类神经丘的帮助下,鱼类能够充分地获取外界流场的速度信息与压强信息,再经由大脑实现对于这2 类信号的处理,即使处于黑暗环境,也能够较好地感知水流信息,获取周围障碍、生物的位置,在水下更好地生存[12]。
2 基于不同感知原理的人工侧线传感器
为了克服声学和光学原理在水下复杂环境中的失效问题,研究者们以真实侧线为灵感,基于不同的传感原理制作了多种用于水下检测的人工侧线传感器,以此为单元设计出人工侧线传感器阵列,开展多种水下检测研究,并与仿生机器鱼结合进行感知与控制研究[13-14]。
现有的人工侧线传感器主要采用以下传感方式模拟鱼类的侧线感知功能: 压阻效应、压电效应、电容效应、光学原理以及热线式风速仪原理等,部分人工侧线传感器如图5 所示。
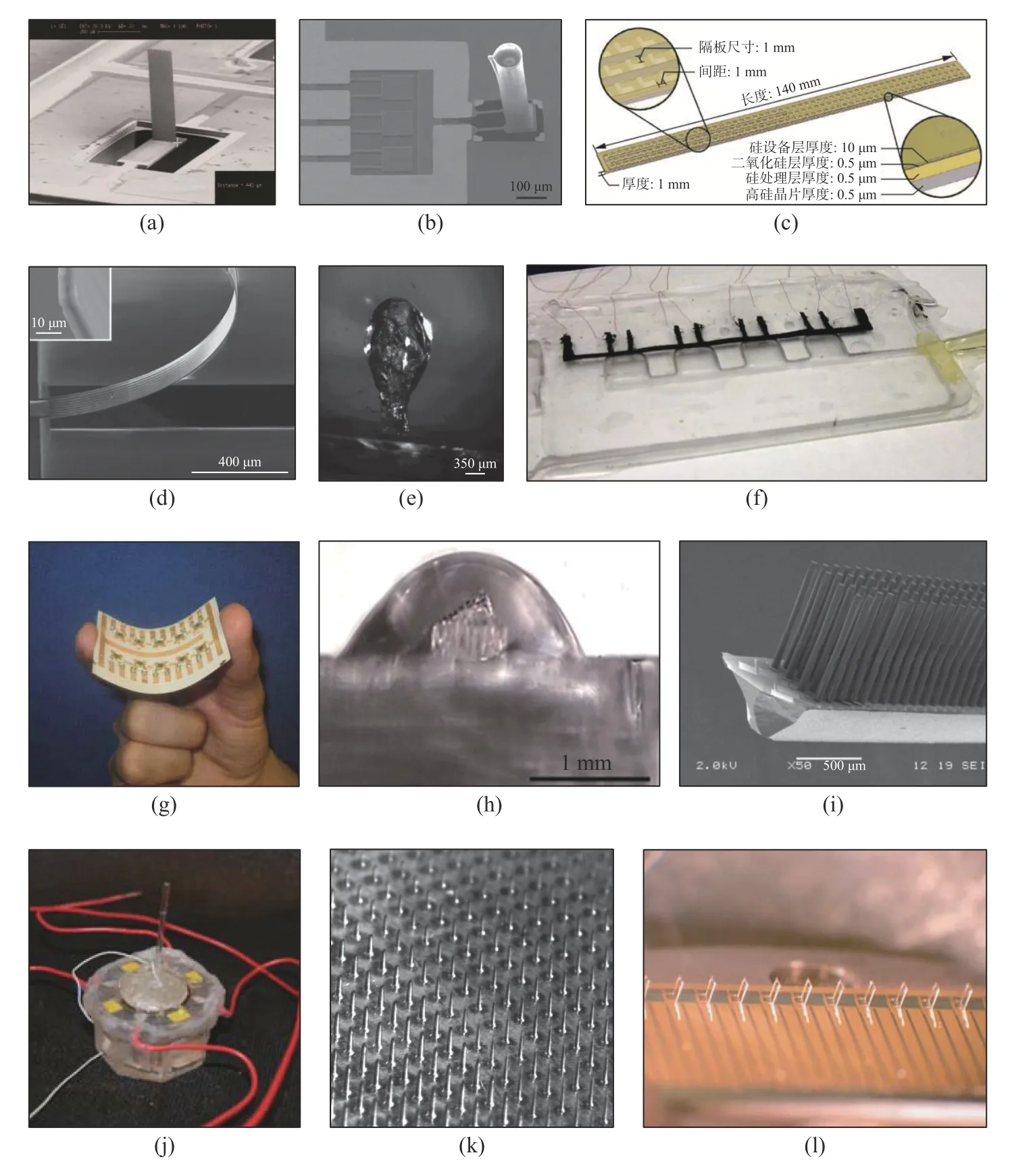
图5 基于不同传感原理的人工侧线传感器Fig.5 Several artificial lateral line sensors based on different sensing principles
2.1 压阻效应
压阻式传感器主要基于半导体材料的压阻效应感知外部信息。半导体材料受到外力后发生形变,电阻也会产生变化。通过设计合适的测量电路,读取有关电学信息,能够反推出压强、张力等待测的力学量,进而得到水流的速度、压强等信息。真实的侧线由2 类神经丘组成,以此为灵感设计的压阻式人工侧线传感器也可分为2 类,分别能够测量水下的流速与压强。
Fan 等[15]制造出第1 个压阻式人工侧线流速传感器。该传感器(见图5(a))主要由1 根垂直的人造纤毛、1 个固定式的半导体自由悬臂和1 个应变仪组成。类似于鱼类侧线的感知机理,外部水流流经时,连接在悬臂自由端的纤毛产生弯曲,导致悬臂发生形变,位于悬臂梁底部的应变仪测量出这一形变大小,反映水流信息。该传感器能够测量流速范围为0.1~1 m/s 的层流。后续的研究者将这一传感器与热线式风速仪进行对比,省略了悬臂设计,将纤毛直接连接在基板上,更加贴近真实侧线的结构(见图5(b))。这一改进设计使得传感器能够用于不同温度条件与多种复杂流动下的流速检测,提高了传感器的适用范围与稳定性,并且能够大规模集成,用于分布式流量传感[16]。此外,研究者们还从传感器结构、半导体材料选择、制作工艺等角度进行优化(见图5(d)(e)),提高了人工侧线流速传感器的灵敏度、测量范围及鲁棒性等性能[17-26]。
人工侧线流速传感器主要基于悬臂或纤毛结构,而另一类用于测量压强的人工侧线传感器主要采用平面结构设计,将压阻器件直接安装在基板上,检测水下压强场的分布与变化。Vicente 等[27]提出一种用于检测方形和圆柱形障碍物的人工侧线压强传感器阵列(见图5(c))。该阵列由数百个微型压强传感器组成,这些传感器都被集成在半导体材料上。该阵列的压强检测极限为1 Pa。除了集成现有的压强传感器外,研究者们还自主设计了多种用于人工侧线系统的压强传感器,并将其通过一定的排列方式组合成传感阵列(见图5(f)),用于检测水下的压强信息以及物体信息。通过使用液晶聚合物等新型材料,传感器的化学稳定性、密封性以及强度得到了大幅提升,能够用于极其恶劣的深海环境[28-31]。
2.2 压电效应
压电效应是指特定材料在受到外力作用时表面上产生电荷,破坏原有电中性的现象。这种现象也为人工侧线传感器的研发提供了新的灵感。基于材料压电效应的传感器能够通过收集电信息来感知来自外部环境的力学信息。Asadnia 等[32-33]制作了一款基于Pb(Zr0.52Ti0.48)O3薄膜材料的压电式压强传感器(见图5(g))。其采用立体光刻工艺,将聚合物纤毛连接在薄膜上,并且通过浮动电极来测量材料产生的压电效应大小,进而得到纤毛感受的外部环境信息。并基于纤毛束结构设计了一款微型流量传感器(见图5(h)),其主要部件为用于感知外部信息的聚合物细丝与压电纳米纤维。该团队使用精密滴铸和膨胀工艺,在纤毛束周围形成了一个圆顶状水凝胶壳斗,提升了传感器的稳定性。该传感器的检测阈值为8 µm/s[34]。此外,离子聚合物-金属复合材料(IPMC)、聚偏二氟乙烯(PVDF)等压电智能材料也能够用于制作压电式人工侧线传感器[35-36]。相比于压阻式传感器而言,压电式传感器元件能够在外力作用下自主产生可测的电信号,不需要添加外部测量电路,因此体积较小,易于集成。
2.3 电容效应
电容器具有高灵敏度和低功耗的特点,因此也被应用到许多不同类型的传感器中。电容式传感器中最关键的组件是电容示值器,它能够将外部刺激的作用效果转换为电容的变化,从而提供了一种检测水下压强和流速的有效方法。类似于压阻式传感器,附着在基板上的纤毛在局部流动的作用下发生形变,进而改变基板电极间的距离,根据电容的变化信息就能够得到外部流场的信息。Krijnen 等[37]受蟋蟀感知启发,将纤毛连接到氮化硅薄膜上,薄膜间的铬电极形成了可变的电容器(见图5(i))。该传感器的结构还可以进一步优化[38-39]。Stocking 等[40]受海豹触须启发制作了一种电容式晶须传感器(见图5(j))。将刚性人造晶须连接到锥型平行板电容器基座上,流场变化引起晶须形变,进而导致电容的变化。电容式传感器能够用于测量流场信息,但是严格来说,其结构和感知原理与鱼类的侧线并不相同。目前对于电容式传感器的研究仅局限于传感器的制作以及校准,并未有大量的实际应用研究。
2.4 光学原理与热线式风速仪原理
光学原理与热线式风速仪原理也在一定程度上推动了人工侧线传感器的发展。基于光学原理的传感器具有类似于侧线的纤毛结构,纤毛在水流中的弯曲可以通过红外发光二极管等光学方法进行测量,进而推算水流速度(见图5(k))[41-44]。热线式风速仪是一种常用的测量仪器,主要结构为放置在流体中且被加热过的金属线,当有流体流经时,热量的损失导致温度和电阻的变化,进而可以通过电信号测量流体速度。研究者们基于这一原理制作了用于测量流场速度的传感器阵列(见图5(l))[45-48]。这2 类传感器虽然能够测量流场速度,用于水下检测研究,但是与鱼类的侧线结构有着很大的差异,难以安装到仿生机器鱼载体上进行感知实验探究。
2.5 小结
目前大部分的研究主要关注压阻式传感器的设计与优化。相比于其他传感器,压阻式传感器在感知原理上最接近鱼类的侧线神经丘,制作工艺更加成熟,商业产品化程度更高,稳定性更好,因此,研究者们更多地会选择基于压阻效应的压强传感器与流速传感器进行水流检测研究,或者与仿生机器鱼相结合。现有的人工侧线传感器已经能够用于初步的水下探测研究,但是这些传感器大多只是简单模仿了鱼类侧线神经丘的结构,并不能深度还原具体的感知机理,在信息处理性能方面还有很大的差距。
为了更好地模拟真实的鱼类侧线,除了对于单个传感器的设计之外,研究者们还对阵列中的传感器数目、位置分布优化进行了深入的研究。针对各种流动问题(如均匀流、偶极子振荡源产生的流动),基于势流理论与保角变换计算特定翼型周围的速度场与压强场,从场的数据分布特征、系统经验可观测性等角度进行分析,提出一些描述传感器性能的指标,如最优测度、对流速以及目标物体信息的估计误差等,然后利用优化方法得到最优的传感器数目以及位置分布,并且与真实鱼类的侧线分布进行了对比[49-53]。这一类研究探究的问题较为简单,首先,势流理论模型没有考虑真实流动中的粘性效应;其次,保角变换只能探究特定外形周围的流动,较难进行推广;最后,对于一些较为复杂的非定常流动问题(例如鱼体摆动前进时的流场感知),这种方法将极为复杂。为了更好地模拟真实流场,研究者们通过计算流体动力学(computational fluid dynamics,CFD)仿真以及实验获取流动中的流场数据,提出描述传感器数据有效性、差异性和冗余性的指标,通过贝叶斯估计、神经网络等方法求解传感器的最优分布,得到更为可靠的结果[54-58](见图6[56],图中序号1~20 为传感器最优位置顺序)。但是总体而言,对于这一类问题的探究,目前大多只停留在工程优化的层面,不同的问题有着不同的优化目标以及不同的侧线分布特征,尚未有一个从真实鱼类侧线生物机理与进化角度出发,能够真正解释侧线分布、指导传感器阵列设计的结论。
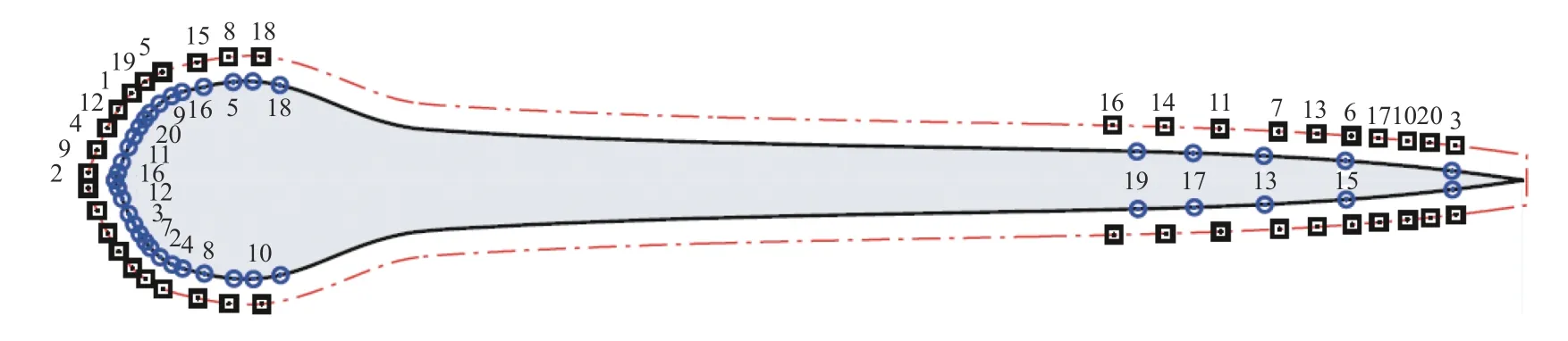
图6 压强传感器与剪应力传感器分布优化结果Fig.6 Optimization results for the distribution of pressure sensors and shear stress sensors
3 基于人工侧线系统的水流检测研究
自然界中的水流十分复杂,并且上文提到现有的水下探测方法具有一定的局限性,随着各种人工侧线传感器的出现,由这些传感器组成的人工侧线系统逐渐被用于感知流体环境信息。目前这类研究主要集中在以下几个方面: 流场分类、流速与流向检测、涡街检测和振荡源检测等。部分人工侧线系统及其载体如图7所示。
1) 在流场分类方面,Salumäe 等[59]使用1 条安装有5 个压强传感器(S1~S5)的机器鱼(见图7(a))开展流动分类实验,发现在不同的流动环境下(例如均匀流动和周期性湍流),压强传感器数据呈现不同的特征,这一点能够帮助机器鱼识别所处的流场环境;此后又通过增加传感器的数目(ps0~ps10)提升了人工侧线系统的性能(图7(b)分别为轴线AA'上的主视图与俯视图),新的人工侧线系统能够帮助机器鱼基于压强波动分布区分层流与湍流[60]。除了对于压强数据的基本分析外,学习方法也能够帮助人工侧线系统识别流场环境。Liu 等[61]使用由23 个压强传感器组成人工侧线系统(见图7(c)),基于可视化的压差矩阵与一个4 层卷积神经网络完成了流场分类任务。
2) 水流最重要的参数为流速与流向,对这2个参数的准确估计是精准、稳定控制机器鱼运动的基础。Salumäe 等[59]基于伯努利方程,拟合出机器鱼(见图7(a))两侧的平均压强与水流速度的关系,同时基于机器鱼受到水流冲击的一侧压强更大,提出根据机器鱼两侧压强差识别流向的方法。此外,核岭回归以及神经网络等学习方法也被用来分析人工侧线数据与水流流速、流向的关系[62-65]。
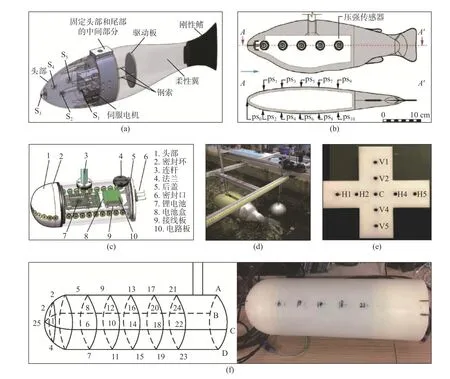
图7 多种人工侧线系统及载体Fig.7 Several artificial lateral line systems and the carriers
3) 涡街在自然界中十分常见,例如水流流经岩石障碍物产生的尾流、鱼类摆尾产生的尾迹等。对涡街特征的估计能够帮助机器鱼识别上游物体的尺寸、位置以及周围鱼类的相关信息,这对机器鱼在自然水流环境下的感知与运动具有重要意义[66]。Yang 等[47]首先使用人工侧线系统分析圆柱体产生的Kármán 涡街的空间速度分布。Ren等[67]从理论角度研究了真鱼如何利用侧线感知涡街,基于势流理论,建立了鱼体附近压强场分布与涡街尺寸、传播速度和方向等参数的联系[41,59,68]。此外,涡街频率、强度和距离等参数也被证明能够通过人工侧线数据来估计[69]。在此基础上,Free等[70-71]通过经验观测确定了游经涡街的最优路径,采用闭环控制策略,实现了机器鱼在涡街中的导航与巡游。
4) 振荡源也是一种模拟鱼类尾迹的方法。利用人工侧线系统获取的速度与压强信息,估计振荡源的位置与运动方向,对于进一步实现水下机器鱼的最优轨迹控制与跟踪游动有着重要意义。基于势流理论,Yen 等[72]将机器鱼的尾鳍视为振荡源(见图7(d)),建立了流场变化的数学模型,描述了尾鳍摆动参数与人工侧线压强变化的关系,设计了让机器鱼根据人工侧线信息调整摆动幅度、频率和偏航角的跟踪控制方法。除了流体力学理论模型外,研究者们还使用CFD 仿真和真实实验的方式,基于其他人工侧线模型(图7(e)和(f))获取相关数据,图7(e)中字母所示为传感器位置。使用最小二乘法、波束成形算法以及神经网络等方法,较好地估计了振荡源的参数[3,44,51,73-88],实现了对振荡源运动轨迹的追踪[89-90]。
4 基于人工侧线系统的仿生机器鱼感知与控制研究
水流检测主要基于静态的机器鱼模型或者静态的人工侧线阵列,而对于自由运动的机器鱼而言,使用运动的侧线感知非定常流动时,难度将大大增加。然而,Chambers 等[91]的研究表明,运动状态下的人工侧线感知性能优于静态侧线,这也与自然界中鱼类的感知方式一致。因此,搭载有人工侧线的、运动的机器鱼能够提供更有价值的实验数据,可以尝试利用这些信息,让机器鱼实现类似于真实鱼类的感知功能与自主决策行为。由于完全自由游动情形较为复杂,研究者们通常首先探究具有一定运动约束的侧线感知问题。目前,相关领域已有较多的研究成果,例如运动模式识别、运动参数(速度、攻角等)估计与控制、障碍物识别与避障、邻近机器鱼的感知、定位以及能量节省等。这也是笔者团队的主攻方向。部分仿生机器鱼与人工侧线系统如图8所示。
在运动模式识别方面,Liu 等[92]发现机器鱼以不同的模态(直游、转弯、上升和下潜等)运动时,压强数据呈现出不同的特征。他们从9 个压强传感器数据中提取特征点,基于减法聚类算法识别出机器鱼的运动模态。该方法有助于从侧线数据中快速获得机器鱼的运动状态,有利于后续迅速、高效施加控制决策。
在运动参数估计以及机器鱼控制方面,Kruusmaa 等[93]基于压强传感器(见图7(a))测得的数据给出速度估算公式,并且提出一种线性控制律来调节机器鱼尾鳍摆动频率,从而保持位置的稳定。此外,还基于鱼头两侧的压差估计鱼头与水流的夹角,并且设计控制方法让机器鱼根据压差数据调整游动参数,最终实现了机器鱼在稳态水流以及障碍物后方的位置估计以及位置稳定[94]。美国马里兰大学研究团队[95-97]设计了一种类似于Joukowski 翼型的柔性机器鱼(见图8(a),图中物理量详见文献[95]),并在体表安装分布式压强传感器,同时基于贝叶斯滤波器提出一种检测流速和攻角的方法,实现了对机器鱼游速的反馈控制。此外,相关研究表明,基于神经网络等训练方法,压传数据还能够反映机器鱼的俯仰角、扰动力和扰动力矩等参数,有助于提升对机器鱼的运动控制精度[98-100]。
避障功能也是机器鱼水下游动过程中必须具备的功能之一,这一方面也有着许多研究成果。Martiny 等[101]使用一款装配有4 个热线式人工侧线传感器的自主水下航行器(见图8(b)),基于测得的航行器周围的流速信息,通过理论分析与实验方法估计出了障碍物与航行器的距离。DeVries等[96]对上游有障碍物时机器鱼(见图8(c))周围的流场进行分析,从理论的角度得到了估计障碍物相对位置的非线性模型,并且使用递归贝叶斯滤波实现了机器鱼在障碍物后方的位置稳定。Yen等[102]将机器鱼(见图8(d),图中A,B,C 分别为传感器位置)的尾鳍等效为一个振荡偶极子源,基于3 个压强传感器测得的数据提出了一种控制机器鱼沿着直线壁面游动并且保持一定距离的方法。此外,Yang 等[103]使用压差传感器与流速传感器融合感知,使得机器鱼(见图8(e),图中P1~P3为压强传感器,V4~V6为速度传感器)在不同的攻角下都能够估计出与壁面的距离。现有的避障研究都基于最简单的情形,目前尚未有能够控制机器鱼在复杂障碍物群之间自由游动的研究结果,距离真正的避障需求差距较大。
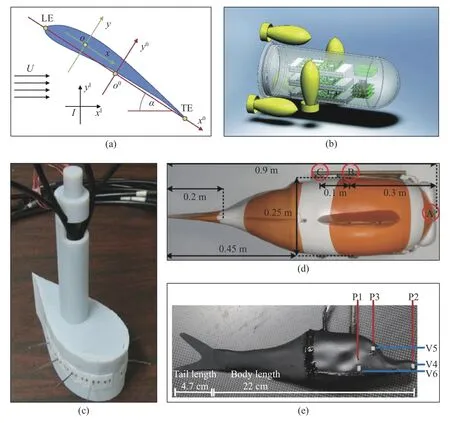
图8 多种仿生机器鱼及人工侧线系统Fig.8 Several bio-inspired robotic fish and artificial lateral line systems
实际应用中,希望能够控制机器鱼群完成单条机器鱼无法完成的复杂任务。因此,除了对于单鱼的感知、控制研究外,多个机器鱼相互间的感知与编队控制也是一个热点问题。Li 等[104]基于仿真数据训练了人工侧线压强数据与双鱼距离的关系。Yen 等[105]用一个振荡源模型模拟前鱼的鱼尾,基于压传数据估计出前鱼的位置,并且设计了反馈跟踪策略。Li 等[106]基于CFD 仿真与快速傅里叶变换(fast Fourier transform,FFT)方法,分析了双鱼前后距离、左右距离以及相位差等参数对于压强信号的影响。笔者团队[107-110]在这一方面也开展了大量研究,发现基于人工侧线测得的压强信息,后方的机器鱼能够感知到前鱼的尾鳍摆动信息(例如频率、幅度和偏航角)以及两鱼的相对位姿信息(例如相对垂直距离、相对偏航角、相对俯仰角和相对侧倾角等)。为了更好地进行感知,基于伯努利原理提出了双鱼游动时体表动压变化的理论模型,并且采用可视化实验和CFD 仿真对集群游动现象进行了一定的分析。目前基于侧线的集群游动研究只局限于数目较少的群体间的感知,尚未有基于侧线数据的集群编队控制方面的研究以及大规模群体的研究。
除了上述研究主题外,人工侧线也有助于实现机器鱼的定位。Muhammad 等[111]提出了一种水下地理感知技术,使得机器鱼能够根据侧线数据在半自然或自然环境中识别出曾经到达过的位置。Francisco 等[112]提出一种基于地图的定位技术,使用CFD 方法计算环境的流场速度分布图,再根据人工侧线系统获取的信息估计所处的位置。此外,对于鱼类、机器鱼的研究还有推进、节能等主题[59],由于上述研究中并不涉及人工侧线感知,所以不再赘述。但是在未来,也可以从侧线感知的角度探讨这些问题。
5 基于仿箱鲀机器鱼的仿生侧线感知研究进展
笔者团队以自然界中的箱鲀(见图9)为仿生对象,设计了2 款机器鱼(见图10)。箱鲀外形独特,像一个盒子,盒子边缘有独特的脊骨结构,且皮肤表面呈现凹凸的特征。在游动时,这种结构能帮助箱鲀产生有利于姿态稳定的涡[113-115]。此外,盒子状的机器鱼能够在体内搭载更多用于感知、控制的硬件设备,有利于研究的开展。

图9 真实的箱鲀鱼Fig.9 Real boxfish
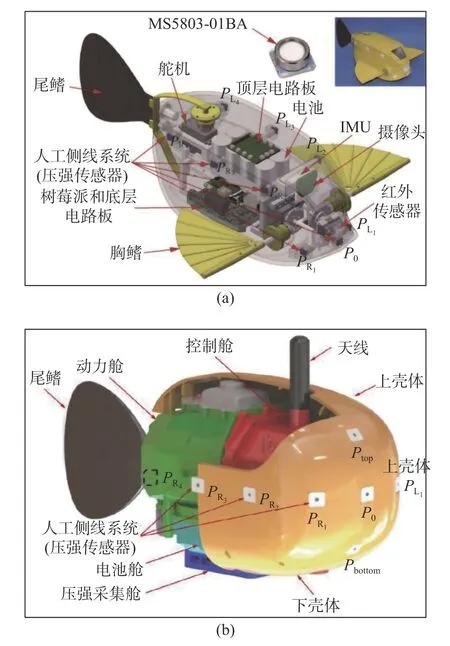
图10 2款仿箱鲀机器鱼Fig.10 Two box-fish-inspired robots
5.1 2 款仿生机器鱼及其动力学建模
对于2 款仿生机器鱼,其中一款外形接近箱鲀的特征,由多鳍肢驱动(尾鳍、胸鳍等)(见图10(a))。在另一款仿生机器鱼的设计过程中,考虑到上述提及的箱鲀游动时产生的涡结构以及胸鳍的摆动会影响体侧侧线的感知效果,将机器鱼壳体简化为规则盒状,并且去除了其他鳍肢,采用单尾鳍驱动(见图10(b))。2 款机器鱼分别搭载有9 个和11 个压强传感器作为人工侧线系统,以及惯性导航模块(inertial measurement unit,IMU)测量三维空间内的加速度与姿态角信息。2 款机器鱼都基于中枢模式发生器(central pattern generator,CPG)来控制鳍肢的摆动,可以调整鳍肢的摆动频率、幅度和偏置,实现直游、转弯、上升、下降和横滚等运动。
在开展感知与控制研究之前,首先需要对于机器鱼在水下的运动特性进行分析。针对2 款机器鱼建立了自由游动的三维动力学模型,该模型能够在不同的运动方式及大范围的运动参数下有效估计机器鱼在水下的速度、姿态和轨迹等信息(见图11[116-117])。
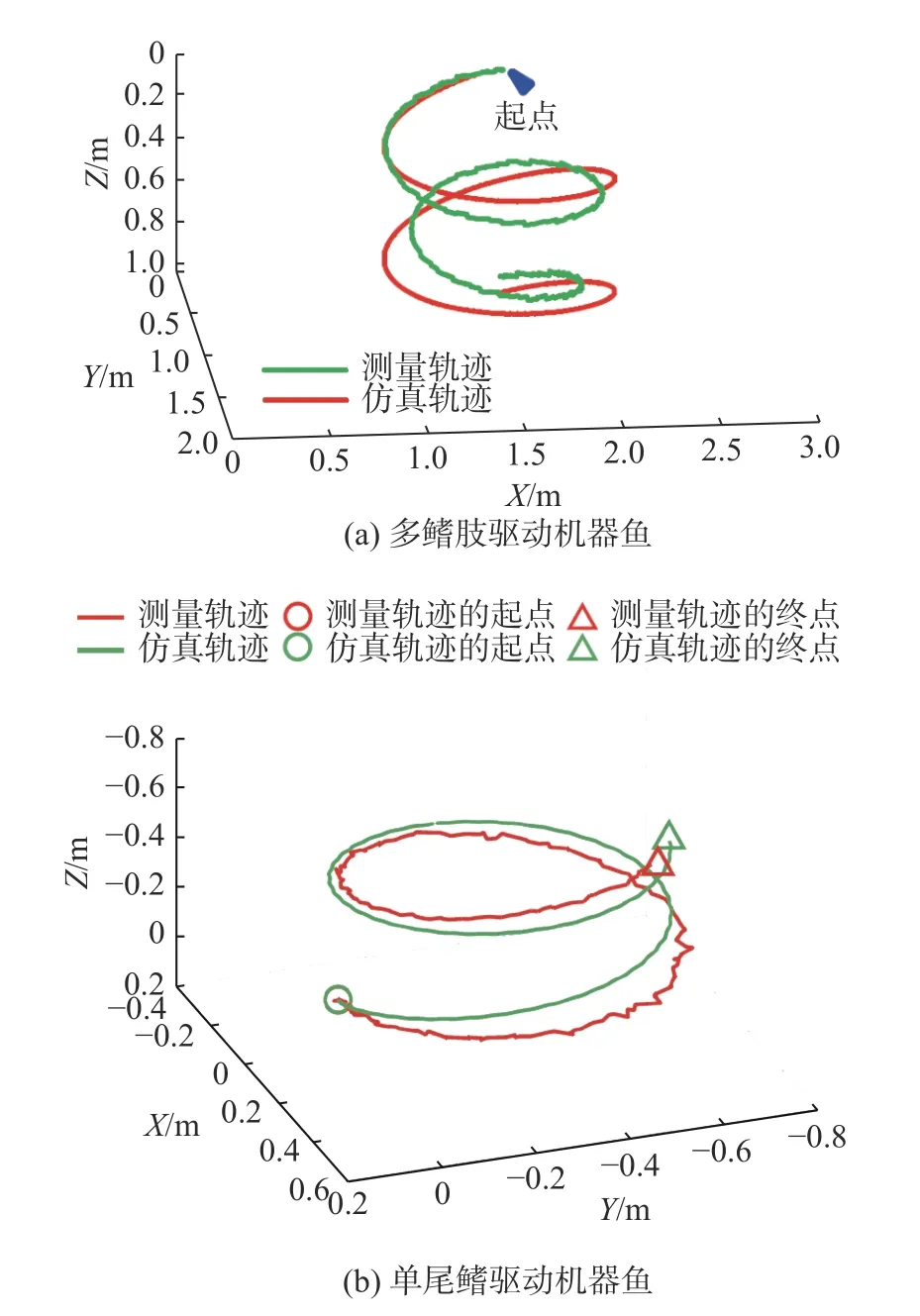
图11 盘旋运动下基于动力学模型的轨迹估计结果Fig.11 Trajectory estimation results based on dynamic model under spiral motion
5.2 基于人工侧线系统的运动状态估计
运动状态估计是仿生机器鱼研究中的基本问题之一,只有实现了准确的运动速度、轨迹估计,才能更好地对仿生机器鱼进行控制,开展下一步研究。笔者团队基于2 款仿生机器鱼,在运动参数估计方法上取得了一定的进展。
机器鱼的游动速度是最重要的运动参数之一,现有的速度估计方法大多基于伯努利方程,机器鱼头部的静态压强、动态压强以及游动速度有如下关系
式中:pt为运动时头部的驻点压强;ps为静止时的压强;v为运动速度;ρ为水流密度。在此基础上,发现机器鱼游动时身体会进行节律性摆动导致驻点位置的偏移,因此在速度估计模型中引入了角速度ω,有
式中:p为鱼头处3 个压强传感器减去静水压强后的均值;a,b,c,d为待定系数。根据回归结果能够基于压传数据与角速度反解游动速度,准确、实时地估计机器鱼的游动速度[118](见图12(a)[119])。
此外,除了游动速度,还需要考虑机器鱼的转弯角速度、上升/下降速度,才能实现对机器鱼轨迹的准确估计。基于Lighthill 的理论分析结果与非定常伯努利方程,首次推导出机器鱼体表动态压强变化量∆pdynamic(绝对压强减去静水压强)与主要运动参数的关系模型
式中:U表示游动速度;ω表示偏航角速度;θ表示俯仰角速度;每一项前的系数都是只依赖于机器鱼几何外形的参数。基于实验测得的数据,采用最小二乘法标定出适用于不同运动状态(直线、转弯、上升和盘旋)下的模型参数。标定完成后,在后续的实验中,基于侧线压传测得的压强数据,反解出机器鱼的运动参数,最终实现对轨迹的准确估计(见图12(b)[120])。
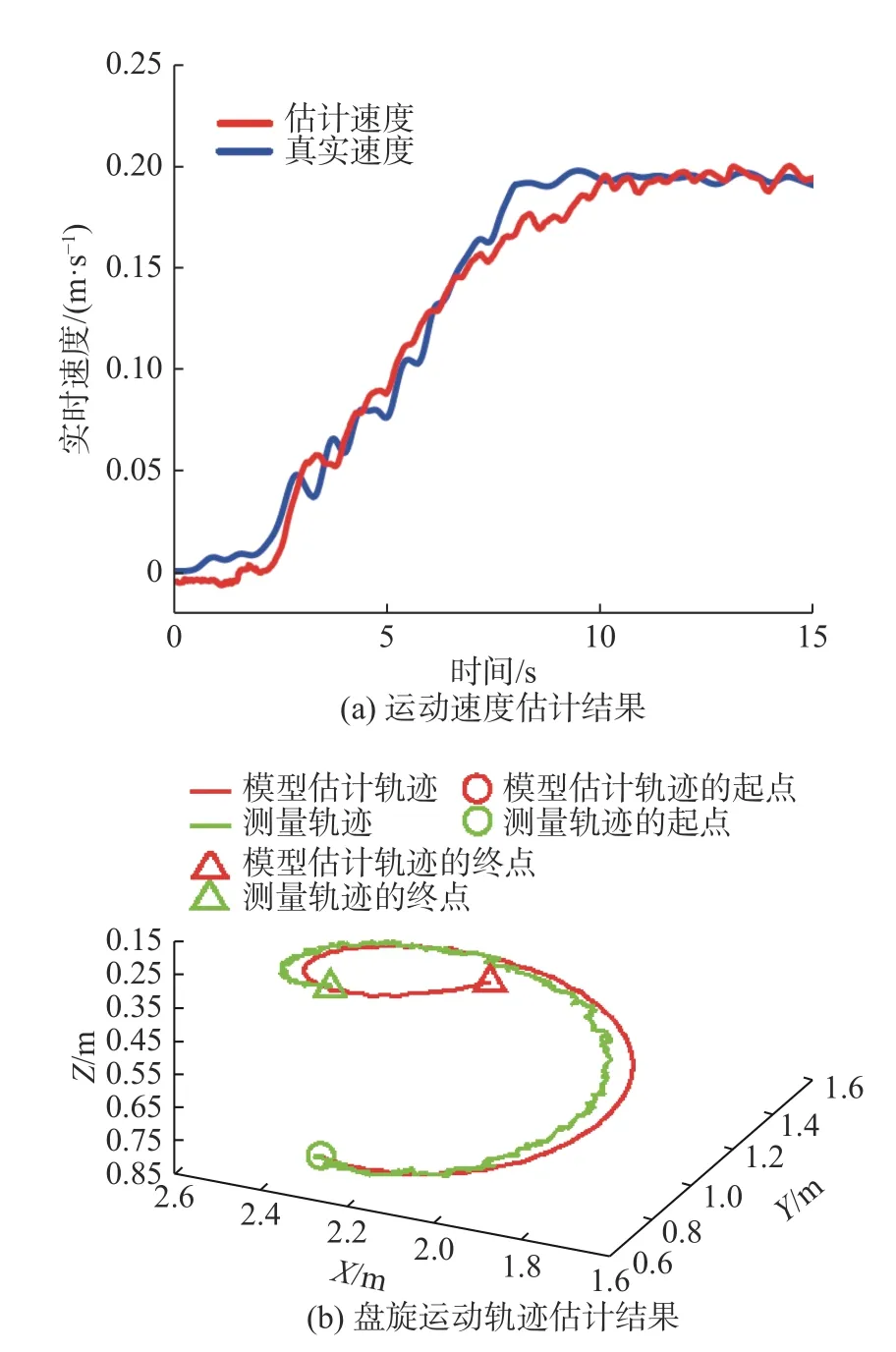
图12 运动状态估计结果Fig.12 Estimation results of the motion states
该工作首次实现了对于自由游动机器鱼的轨迹估计,且方法能够推广至所有拥有刚性壳体的机器鱼,也证明了人工侧线系统在运动参数、轨迹估计方面的有效性,并具备成为水下机器人通用传感系统基本元件的潜力。在未来,会关注压强传感器在野外环境中的标定,并且尝试将人工侧线系统应用于自然环境中的轨迹估计研究。此外,还会将人工侧线系统得到的轨迹信息作为闭环控制回路中的反馈信息,实现对水下机器鱼的轨迹跟踪控制。
5.3 基于人工侧线系统的姿态保持控制
攻角即机器鱼朝向与来流的夹角。为了能够控制机器鱼像真实鱼类一样在水下自由游动,除了需要控制机器鱼的游动速度外,还需要控制机器鱼在来流中的攻角,实现姿态的稳定。在此基础上,从传感器融合感知的角度进一步研究这一问题。对比基于3 种反馈信息(人工侧线与神经网路估计的攻角数据、IMU 测得的偏航角数据以及二者融合数据)下攻角控制策略的效果,可以发现,双传感器融合信息方法优于单传感器方法(见图13[121])。
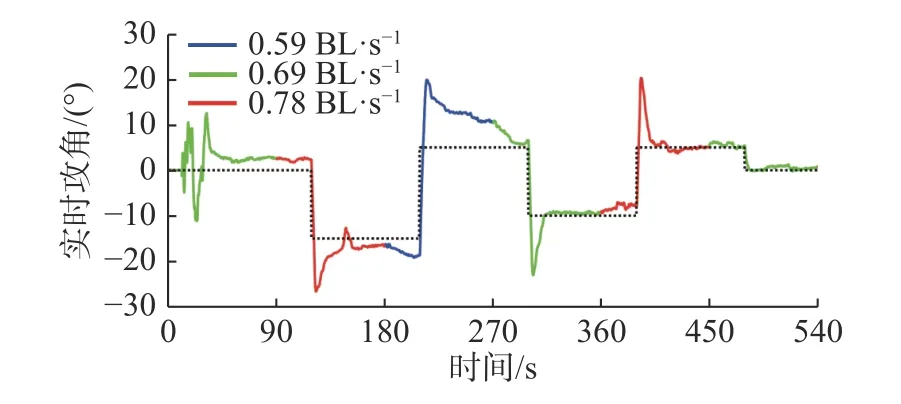
图13 单尾鳍驱动机器鱼基于双传感器融合方法的攻角控制结果Fig.13 Control results of angle of attack of single-tail driven robotic fish based on dual-sensor fusion method
为了更好地解决这一问题,首次引入强化学习框架。由于流体的强非线性,机器鱼在游动时周围的流场变化无法用简单的理论模型表达。为此,采用深度神经网络模拟机器鱼游动时的流固耦合环境。基于这一虚拟仿真环境不断生成数据,使用确定性策略梯度(deep deterministic policy gradient,DDPG)算法训练机器鱼利用压强传感器数据与IMU 数据实现姿态稳定的控制策略。最终,强化学习框架能够直接将人工侧线系统测得的传感器原始数据以端到端的方式直接映射到连续控制信号,实现对攻角的控制(见图14[122])。由于虚拟环境的引入,避免了大量获取实验数据的过程。相比于传统的模型预测控制(model predictive control,MPC)方法而言,该方法能够与MPC 方法相媲美甚至效果更好。此外,MPC 方法依赖大量的计算资源,需要在电脑上运行部署,而基于学习的方法能够直接在机器鱼搭载的树莓派上运行,这对于自主式机器鱼的感知与控制有着重要意义[122]。
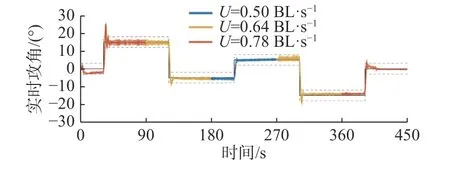
图14 单尾鳍驱动机器鱼基于深度强化学习框架的攻角控制结果Fig.14 Control results of angle of attack of single-tail driven robotic fish based on deep reinforcement learning framework
这个方法能够很好地用于实验室环境下的姿态保持控制,但是自然环境下的实验具有更多的不确定性。当机器鱼能够自由游动时,控制其相对于水流的攻角也会更加复杂。未来,将尝试结合速度、攻角的估计与控制研究,在自然环境中让机器鱼像真实鱼类那样游动。
5.4 基于人工侧线系统的机器鱼邻近感知
目前关于仿生机器鱼群的感知与控制研究较少,笔者团队较早地基于人工侧线系统开展了对于多鱼邻近感知的探究分析。一方面,通过可视化与CFD 仿真技术分析了机器鱼摆尾产生的涡街特性(见图15[107])。另一方面,通过采集尾鳍摆动引起的流场压强变化数据,发现人工侧线压强传感器能够检测到前方尾鳍的摆动幅度、频率、偏置角以及相对垂直高度、相对偏航角、相对俯仰角以及相对横滚角等相对位姿信息[107]。在此基础上,基于线性回归、随机森林和神经网络等方法通过压强传感器数据对上述信息进行估计,得到了较好的估计效果(见图16[108])。
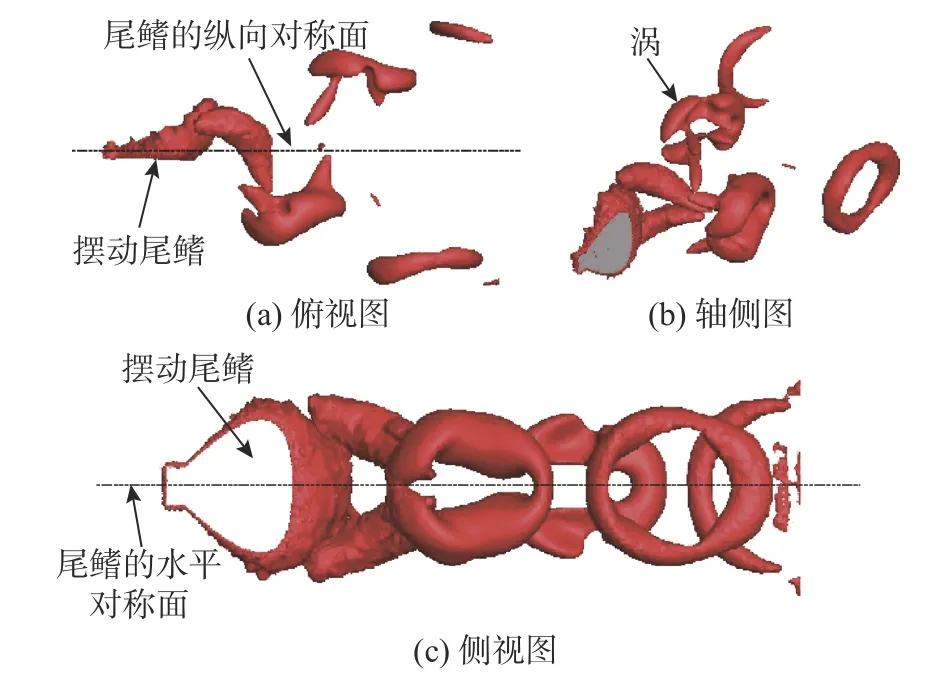
图15 尾鳍后方瞬时涡环图Fig.15 Instantaneous vortex core region behind an individual oscillating caudal fin
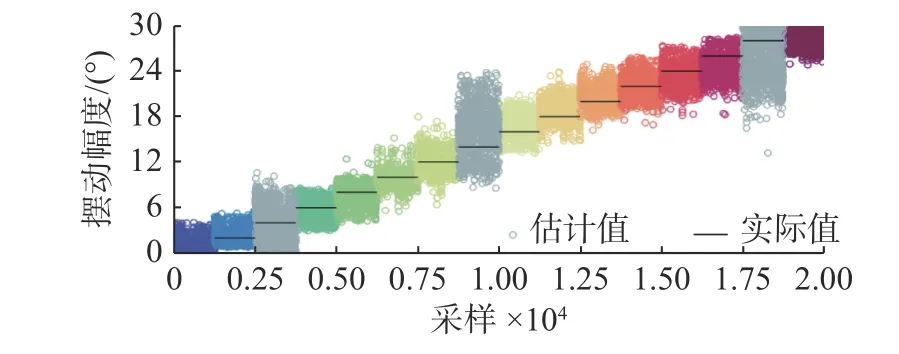
图16 基于随机森林方法的前方尾鳍摆动幅度估计结果Fig.16 Estimation results of oscillating amplitude of the front caudal fin based on random forest method
此外,还分析了领航者-跟随者的双鱼队形下,人工侧线压强数据与前后距离的关系[109],如图17[110]所示。图中: Δd1和Δd2为器件尺寸;Slogitudinal和Slateral为机器鱼前后、左右距离;Vu和Vd为两鱼速度;ωu和ωd为两鱼角速度。进一步地,基于势流理论与数据驱动方法,提出了双鱼队形下的压强理论模型,发现运动两鱼相对一侧的传感器会受到两鱼运动的影响,而两鱼相背一侧的传感器只会受到自身运动的影响。实验结果也验证了这一模型的准确性[110]。
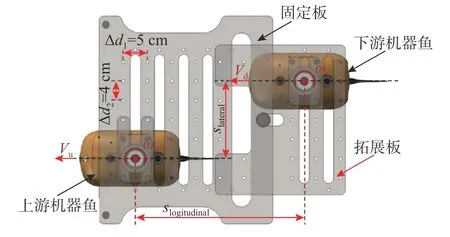
图17 双鱼领航者-跟随者队形示意图Fig.17 Leader-follower formation diagram of two robotic fishes
以上进行的机器鱼邻近感知研究大部分都是简化的问题,机器鱼的部分自由度被约束。目前尚未有关于完全自由的集群游动时机器鱼对周围个体的感知研究。进行此项研究的基础是首先需要基于一些方法让机器鱼以特定的队形稳定地进行游动,目前尚未有基于侧线反馈信息实现队形控制的研究,而能够实现队形保持的机器鱼模型也并未搭载人工侧线。未来可以将这两方面研究相结合,将集群控制与邻近感知研究拓展到完全自由的情形,让机器鱼群能够像鱼群一样进行游动与感知。
6 总结与展望
由于水下探测的需要以及现有水下探测方法的局限性,研究人员以鱼类的侧线感官为灵感,开发了由一系列传感器组成的人工侧线系统,并与水下机器人技术相结合,实现了多项感知以及控制任务。人工侧线系统在水下探测领域展现出巨大的潜力。
文中概述了基于不同原理的人工侧线传感器及其用于水流检测、机器鱼感知与控制的各项研究。关于人工侧线系统的研究已经有了许多成果,但是现有的人工侧线系统性能仍然与真实的鱼类侧线相去甚远。
从传感器性能的角度分析,目前用于人工侧线系统的传感器阵列从灵敏度、稳定性、协调性和信息处理能力等许多方面来看,都无法与真实鱼类的侧线相比。为了提升单个传感器的灵敏度与稳定性,可以从大量新型材料中选取具有传感能力、力学性能优良、化学性质稳定的材料(例如石墨烯等)作为基础,设计相应的敏感元件、转换元件与处理电路,并作防水处理,使得传感器能够在恶劣的温度和压力条件下保持足够的精准度。除了提升单个传感器的性能外,传感器阵列的协调作用也十分重要。现有的人工侧线系统一般只由一种传感器(压强传感器或流速传感器)组成,并且呈直线或方形排列。相比之下,真实的侧线由表面神经丘和管道神经丘组成,并且具有复杂的分布方式。在后续的研究中,可以在机器鱼表面同时安装压强传感器和流速传感器,进行流场感知与机器鱼控制实验,与现有的传感器阵列性能进行对比分析。目前用来优化人工侧线分布的指标大多只能针对某一特定的目标问题,具有一定的局限性,并不能解释鱼类侧线的分布规律,也无法推广到所有的感知任务中。因此,需要研究鱼类侧线分布的生物学原理,提出具有普适意义的传感器性能指标,从而为不同任务场景下人工侧线系统的分布设计提供理论指导。在对侧线信息的处理方面,鱼类能够迅速对感受到的信号做出反应。随着侧线硬件的进步,也需要开发更高效的滤波、感知以及行为决策方法,从算法的角度提升人工侧线的性能。除了传统的算法外,机器学习方法与人工智能的发展为这一问题提供了新的方向。
在水流检测方面,研究者们针对不同的问题提出了多种感知方法。但是,目前的研究大多在实验室环境下进行,人工侧线载体运动简单(例如静止或直线运动),水环境稳定。而在自然环境中,真实的水流与鱼类的游动都要复杂的多,这将大大增加感知实验的难度。随着人工侧线性能的提升,未来需要更多地开展自然环境中的实验,例如使用人工侧线系统在真实的河流中实时估计水流速度、河流中的障碍物位置以及真鱼的位置与摆动状态等,进一步挖掘人工侧线的感知潜力,使其越来越贴近真实的鱼类侧线功能。
水下机器鱼的流场辅助控制是一个前景十分可观的研究方向,未来在海洋勘探中可以得到广泛的应用。作为一切控制任务与感知任务的前提,机器鱼首先需要能够准确估计自身的速度、位置和姿态等信息。因此,需要基于流体力学理论或数据驱动方法建立水下机器鱼的运动学与动力学模型,帮助机器鱼在无法使用视觉的情况下完成运动模式的自我识别与轨迹估计。在此基础上,才能够设计感知与控制方法,丰富机器鱼在水下的功能。避障行为是实现机器鱼自主运动必须要解决的难题之一。机器鱼需要根据人工侧线获取的流场信息,识别障碍物的大小和位置,重新构建出周围的地图环境并且规划最佳导航路径。在实验室环境中,可以探究机器鱼对于简单障碍物单元(例如墙壁、圆形障碍和三角障碍)以及障碍物群的感知,设计相应的避障控制策略。在具备一定的感知能力后,在自然河流实验环境中进一步实现机器鱼的避障游动行为。除了对于单条机器鱼的控制研究外,基于人工侧线系统,还可以研究机器鱼群的相互感知与集群控制,例如在三角队形或方形队形下,探究机器鱼利用人工侧线感知周围个体的位置信息,并且基于相对位置信息设计反馈控制策略,实现队形的稳定。在未来的水下任务中,相比于单鱼而言,使用鱼群能够极大地提高水下探索的效率与水下任务的成功率。
7 结束语
水下仿生侧线感知技术涉及生物学、机器人学、流体力学以及智能科学等多个学科与领域,虽然研究难度较大,但具有较高的研究价值与广阔的应用前景。人工侧线系统的发展为海洋勘探与开发提供了强大的工具,尤其是在恶劣环境下声呐、红外等传感方式失效时。文中主要介绍了水下仿生侧线感知的研究现状以及笔者团队的有关工作。目前现有的研究主要集中于人工侧线传感器的研发、基于人工侧线系统的水流检测、基于人工侧线系统的仿生机器鱼感知与控制等方面。但是目前的大部分研究对问题作了简化,与真实鱼类在水中的游动以及感知还有一定差距,要实现与真实鱼类相媲美的感知能力与自主控制决策能力,还有很长的路要走。在未来,随着硬件与感知决策算法的进一步发展,人工侧线系统有望进一步提升水下机器鱼的感知能力以及其他综合能力,帮助更好地探索海洋、保护海洋,建设海洋强国。
猜你喜欢
少儿画王(3-6岁)(2023年4期)2023-06-28 11:01:55
环球时报(2022-07-13)2022-07-13 17:18:39
环球时报(2022-03-14)2022-03-14 18:19:44
哈尔滨轴承(2021年1期)2021-07-21 05:43:16
小学科学(2020年11期)2020-03-04 11:39:00
电影(2018年8期)2018-09-21 08:00:06
铁道通信信号(2016年7期)2016-06-06 02:21:02
小学阅读指南·低年级版(2016年8期)2016-05-14 13:24:45
小猕猴智力画刊(2015年4期)2015-04-28 23:55:53
天津诗人(2014年4期)2014-11-14 19:05:52