水下无线传感器网络抗恶意干扰技术应用及研究进展
2023-03-17 13:03:04孙海信何崇林王俊峰陈镕杰邓训彬
水下无人系统学报 2023年1期
孙海信 ,何崇林 * ,王俊峰 ,陈镕杰 ,邓训彬
(1.厦门大学 信息学院,福建 厦门,361005;2.天津理工大学 集成电路科学与工程学院,天津,300384)
0 引言
随着人工智能、水声通信和集群控制技术的发展,水下无线传感器网络(underwater wireless sensor networks,UWSNs)在海洋开发和军事方面的应用越来越广泛。然而,UWSNs 水声通信网络信道具有共享性和开放性,这导致UWSNs 的通信网络面临着严重的干扰问题[1]。UWSNs 密集部署时,其水声通信网络不仅面临着系统外部在频域、时域、空域和功率域的恶意干扰,还将面临系统内部合法用户间的互扰,如UWSNs 中其他合法用户在主动探测时产生的声呐信号和路径规划时需要的制导授时定位信号、集群控制产生的控制信号以及水下传感数据的传输信号等水声通信信号,都会对UWSNs 的通信产生一定程度上的干扰,显著降低UWSNs 通信网络信息传输的可靠性和有效性。因此,对于各种资源有限的UWSNs,研究有效的抗干扰方法来对抗水下各种复杂干扰尤为重要。
抗干扰方法总体可分为5 类: 对抗、消除、回避、诱骗和隐藏[2]。常见的抗干扰技术,如跳频扩频技术[3]、直接序列扩频技术[4]、跳时技术[5]、自适应干扰抑制技术[6]和纠错编码技术[7]对传统的干扰具有不错的抗干扰性能。然而,随着无线网络面临的频谱环境日趋复杂恶劣,以及干扰技术的智能化,给无线网络带来了更大的干扰威胁,尤其是面对现在UWSNs 趋于密集部署以及其水声通信网络的窄带宽、高时延的特点。因此,常规无线通信抗干扰技术已难以有效确保水声通信传输的可靠性。
当前,博弈论和机器学习在抗干扰领域中的应用已得到了初步研究,取得了一些有意义的成果。基于博弈论的抗干扰模型通过构建干扰机和合法用户间的攻防博弈模型,揭示双方的行为关系,可更深入地了解干扰者的行为方式,从而有助于合法用户采取更有效的抗干扰策略和方法[8]。但在复杂多变的干扰环境中,合法用户难以获得非法用户的完整干扰策略。在这种不完全信息博弈中,强化学习可通过与环境的不断交互试错,预测出有效的抗干扰策略[9]。因此,在干扰机和无线合法用户的对抗博弈中,以 Q 学习为代表的强化学习算法被应用于动态干扰环境中的无线通信抗干扰策略选取。因此,博弈论和机器学习有望有效解决UWSNs 的通信抗干扰问题。
文中重点介绍了基于博弈论和机器学习的抗干扰技术研究现状,并介绍了UWSNs 及其抗干扰应用的研究现状,同时对UWSNs 的发展趋势及其抗干扰技术的未来研究方向进行了探讨。
1 抗干扰技术概述
1.1 常规无线通信抗干扰技术
总的来说,各类无线通信抗干扰技术都是通过解决通信信号与干扰信号在三维或更高维空间内的重叠问题,增强信号的抗干扰能力,保证通信的有效性[10]。现有的常规无线通信抗干扰技术主要在时域、频域及信号处理域等进行抗干扰信号处理,消除干扰信号的影响。常规无线通信抗干扰技术主要包括以下几种。
1) 直接序列扩频技术: 直接序列扩频(简称为直扩)技术利用伪随机扩频编码将信源信号扩展成宽带信号。直扩技术产生的信号具有宽度大、频段密度低的特点,具有较强的抗干扰性能[4]。朱行涛等[11]提出了一种基于循环平稳差分的直扩信号盲提取抗干扰方法,针对直扩信号与干扰信号间的近似独立性,建立了基于盲源分离的抗干扰模型。为解决传统直扩通信中干扰消除方法的采样和处理困难的问题,Zhang 等[12]采用压缩感知来降低直扩系统的采样率,并进一步提出了一种压缩域的窄带干扰消除方法。
2) 跳频技术和跳时技术: 跳频和跳时技术通过选择通信信道和时隙的方法减少在三维空间中通信信号与干扰信号的重叠,从而保证通信信号传输的有效性[3]。针对跳频通信系统的抗跟踪干扰和部分频带干扰的问题,Quan 等[13]提出了一种多模式跳频方案来获得抗跟踪干扰和频带干扰抑制能力。Hanawal 等[5]联合优化跳频技术和传输速率自适应技术,通过改变信道或调整传输速率来对抗反应式扫频干扰。
3) 混合扩频和自适应干扰抑制技术: 混合扩频技术能够明显增强无线通信抗干扰能力和提升信号的隐蔽性,可以有效解决远近效应以及同台干扰的现象[6];而自适应干扰抑制技术通过对干扰信号进行估计,进而对干扰信号进行抵消,具有较强的抗窄带干扰能力[14]。Luo 等[15]提出了一种遵循最大信干噪比规律的混合扩频方法,该方法利用频谱感知信息自适应地计算权重。
4) 纠错编码技术: 纠错编码技术通过对通信数据进行特定的冗余编码,以扩大码字之间的差别,使每个码字的码之间有一定的关系,从而对数据传输过程中因信道衰落或干扰导致的错误进行纠正[7]。在数据传输中,常见的纠错方式有自动请求重发、前向纠错和混合纠错等方式。Abdulkawi等[16]在差分跳频系统中引入喷泉码作为纠错码,提高了差分跳频系统的抗干扰性能。
5) 空域滤波技术: 空间滤波技术主要是利用滤波模型来区分有用信号和干扰信号,在保证有用信号增益不变的情况下抑制干扰信号。根据阵列结构的不同,可以分为单空域自适应、空域频域结合自适应和空域时域联合自适应阵列等[17]。空域滤波应用于相控阵雷达的谱估计,可以有效提高波达方向(direction of arrival,DOA)估计的精度和抗干扰能力[18]。
6) 干扰抵消抑制技术: 干扰抵消抑制技术主要是对发射端的自干扰信号进行估计,并在接收端进行合理的干扰消除。对于窄带干扰,通过重建自干扰的参考信号[19],利用调整参考信号的幅度、相位和时延等参数,对自干扰信号进行恢复。对于宽带干扰,采用多抽头射频域自干扰抵消结构[20],模拟出宽带自干扰信号,达到抵消干扰信号的效果。Lee[21]提出了一种基于基带单抽头自干扰抑制方法来优化正交频分复用的宽带全双工系统[21]。
7) 信道估计技术: 信道估计技术是通过相应的信道估计算法,模拟或计算出实际信道中的一些参数,以便接收端可以获得信道的冲击响应[22]。信道估计算法可以分为两类: 一类是基于训练序列的估计算法[23],该方法主要是从接收机已经接收的信号信息中训练序列来进行信道估计,该方法应用范围比较广,但会带来宽带的浪费和时延的产生;另一类是盲估计算法,这种方法不需要训练序列,而是利用传输数据的内在数学信息,该方法虽节约了带宽,但计算复杂性高,灵活性较差,因此其应用场景较少。
8) 时间反转镜技术: 时间反转镜技术是一种近似“光路可逆”的阵列信号处理技术,其原理是将信号源处发射出的信号重新聚焦回信号源处。在采用时间反转镜技术的通信系统中[24],非期望用户信号无法匹配期望用户传输的声信道,因此可很好地抑制非期望用户产生的干扰,进而实现高质量的多用户通信。
随着无线网络面临的信道环境日趋复杂,其受到的干扰威胁越来越大,常规无线通信抗干扰技术已难以有效确保通信传输的可靠性。当前,博弈论和机器学习的研究如火如荼,其同样在解决抗干扰问题中具有显著优势。
1.2 基于博弈论的抗干扰技术
作为现代数学的重要分支,博弈论为无线通信抗干扰过程中对抗双方相互识别、干扰和规避的动态行为提供了有效的数学分析框架[25]。宏观上看,无线通信抗干扰过程是无线通信系统与干扰机博弈的过程。近年来,基于博弈论的无线通信抗干扰方法得到了一定的研究[16],这些研究基于Stackelberg 博弈、随机学习和前景理论等博弈方法,通过构建通信信号与干扰信号间的博弈模型,计算出最优的抗干扰策略。目前,无线通信抗干扰中博弈论研究主要包括功率分配博弈、信道选择博弈、混合策略博弈和多用户协作博弈等。
Jia 等[26]研究了一种具有不完全信息贝叶斯Stackelberg 博弈的抗干扰模型,为合法用户与智能干扰机之间就传输功率和干扰功率的对抗行为进行了分析和建模。在该博弈中,设置合法用户为博弈模型中的领导者,智能干扰机为博弈模型中的跟随者。Lmater 等[27]将无线通信中的抗干扰功率控制问题建模为纳什博弈模型,其中合法用户和干扰机同时采取行动。
Jia 等[28]研究了动态环境下基于干扰抑制的无线通信信道选择问题,并将干扰环境中的信道选择问题建模为一个动态抗干扰博弈,然后提出了一种基于随机学习理论的分布式信道选择算法来寻找博弈均衡解。Zhang 等[29]将抗干扰问题中的多用户和多信道问题建模为一个多领导者单跟随者的 Stackelberg 博弈,并证明了纳什均衡的存在性,以保证用户和干扰机的 Stackelberg 均衡;最后提出了改进的联合信道选择和功率分配算法,使其接近最终的均衡,具有较高的吞吐量和良好的抗干扰性能。
为解决网络层和 MAC 层抗干扰的跨层优化问题,Han 等[30]将路由选择、信道分配和功率控制的联合优化问题描述为 Stackelberg 博弈。Hanawal等[5]通过联合优化跳频技术和传输速率自适应技术来提高无线通信系统的抗干扰能力,将合法用户和干扰机之间的相互作用建模为一个约束的零和马尔可夫博弈,该博弈方案提高了系统的平均吞吐量和抗干扰性能。
针对对抗环境中的多用户信道选择问题,Yao等[31]同时考虑了用户之间的恶意干扰和同信道的相互干扰,并将该抗干扰问题建模为一个领导者和多个追随者的 Stackelberg 博弈模型,然后建立分层学习框架求解 Stackelberg 均衡,并对所提出的分层学习算法的收敛性能进行了分析。Yao 等[9]研究了多用户场景中的抗干扰问题,并考虑了用户间的协调;采用马尔可夫博弈框架对抗干扰问题进行建模和分析,提出了一种协同多智能体的抗干扰算法,获得最优的抗干扰策略。
虽然博弈论解决决策问题具有优势,但此类方法的特点在于通信方需要获取干扰先验信息,通过数学推导得出结果。当干扰先验信息未知时,此类方法实现较为困难,难以应对干扰样式或干扰行为不断变化的情况。
1.3 基于机器学习的抗干扰技术
近年来,随着人工智能理论与方法研究的不断深入,有学者提出基于机器学习的无线通信抗干扰方法。机器学习通过构建一种从数据中进行学习的算法,发现数据的规律,然后把这些规律用于新数据的预测和决策过程[32]。强化学习和迁移学习是机器学习的重要分支。其中强化学习能够从观察结果中自主学习较优的策略,有效解决抗干扰动态环境中信息不完全的问题;迁移学习可将智能体从一个干扰环境中学习的知识迁移到另一个类似干扰环境中用于抗干扰问题的快速解决。
现有基于强化学习的无线通信抗干扰方法从功率分配、频率选择等角度入手[33],综合运用模式识别[34]、多智能体决策[35]等领域知识,实现优化的抗干扰策略选择。无线通信抗干扰中的强化学习主要采用 Q 学习和深度 Q 网络(deep Q-network,DQN)2 种人工智能技术。Yang 等[36]提出了结合快速爬山策略的 Q 学习方法,以联合优化干扰环境下的功率分配和波束形成策略。针对动态智能干扰环境中的抗干扰通信问题,Liu 等[37]提出了一种抗干扰强化学习算法,以获得最优的抗干扰策略。该算法具有探索未知环境的能力,无需对干扰样式进行建模,可用于对抗动态的、智能的随机脉冲干扰。
深度强化学习既有深度学习算法对数据的强大理解力,又具备强化学习算法的决策能力。针对认知雷达无法获取精确干扰模型的情况,Li 等[38]提出了一种基于 Q 学习和 DQN 的跳频策略设计方法,用于对抗智能干扰机。当可用通信信道数量较多时,DQN 的学习性能明显优于 Q 学习。Xu等[39]将认知无线电的抗干扰过程建模为马尔可夫决策过程,提出了一种基于深度强化学习的智能抗干扰方案。该方案中设计了双深度 Q 网络来模拟认知无线电网络和干扰机之间的对抗。为解决智能无线通信抗干扰的决策问题,宋佰霖等[40]提出了一种基于深度强化学习的无线通信抗干扰决策方法。该方法在深度强化学习算法架构下引入经验回放和基于爬山策略机制,以提高收敛速度和决策成功率。Bi 等[41]提出了双DQN 模型,通过使用深度神经网络逼近Q 值表的 Q 函数,将双 DQN 算法和跳频策略应用于多用户环境中的无线通信抗干扰。
传统的机器学习方法在实际应用中面临着许多挑战,如缺少标记数据、无线环境迅速变化、训练过程长以及无线设备的计算能力、传输能力和能源均十分有限等,而迁移学习可减少对标记数据的依赖,提高机器学习收敛速度,增强机器学习方法对不同无线环境的鲁棒性[42]。在无线通信抗干扰领域的研究中,迁移学习可把强化学习模型在类似任务间进行迁移,进而加快相似干扰场景下强化学习的收敛速度[43]。针对在不同通信信道采用不同干扰概率的智能概率干扰,Han 等[44]提出了一种抗智能干扰 Q 学习算法,并结合迁移学习研究了一种多区域智能抗干扰学习算法,该算法能够学习干扰规则,有效加快整个通信区域的学习速度。Lu 等[45]提出了一种无人机辅助蜂窝抗干扰框架,采用强化学习为受到干扰机干扰的移动用户选择中继策略,其中,无人机应用DQN和迁移学习,帮助蜂窝系统对抗智能干扰。
综上所述,基于博弈论和机器学习的无线通信抗干扰方法可有效提高无线通信系统在干扰环境下的可靠性和有效性,并取得了一定的理论研究成果。从国内外的研究现状可分析出通信抗干扰技术的如下发展规律。
1) 应用更加智能。干扰技术和抗干扰技术是矛和盾的关系。近年来,抗干扰技术也开始结合人工智能和博弈论等理论技术,从传统的常规抗干扰逐渐演变为现今的智能抗干扰技术。然而,上述文献虽然采用了人工智能方法,但研究对象还基本限于常规干扰,对干扰行为的学习相对容易;在抗智能干扰领域的研究成果还较少。采用了机器学习的智能干扰机可通过对合法用户行为的在线学习,实时调整干扰策略,显著增加合法用户对抗干扰的难度。因此,如何采用机器学习方法,以“智能对抗智能”,提高无线通信在智能干扰环境下的可靠通信,是未来无线通信抗干扰技术的研究重点。
2) 领域更加广泛。现有的大多数抗干扰技术利用频域、时隙、空间位置或功率等单个维度中的自由度,在存在恶意干扰信号的情况下对信号分组进行解码。但随着干扰技术的不断发展,频时空功等多维度干扰的干扰策略灵活,给通信网络的可靠性和有效性带来了更大挑战。同时,现有的抗干扰技术依赖于在物理层避免干扰信号或减轻干扰。为了阻止针对特定网络协议的干扰攻击,跨层抗干扰技术联合物理层信号处理、数据链路层协议设计、网络资源分配以及跨层参数优化等技术,在存在各种干扰攻击的情况下实现高效的无线通信。因此,如何获得多域和跨层上的最优抗干扰策略、降低合法用户多维度和跨层抗干扰技术的决策难度是未来抗干扰技术的研究重点和难点。
2 UWSNs 概述
2.1 UWSNs 概念
UWSNs 主要由普通的水下传感器节点、无人水下航行器(unmanned undersea vehicle,UUV)、水面浮标和船上基站等设备组成[1]。其中,水下传感器节点根据其在水下的移动性可分为动态节点与静态节点,UUV 可分为遥控水下航行器 (remotely operated vehicle,ROV) 和自主水下航行器 (autonomous undersea vehicle,AUV) 两类。ROV 需要作业人员进行远程控制,而AUV 可实现自动化独立运行。随着对海洋开发的不断深入,可自主进行路径规划、集群控制和数据传输的AUV 的投入使用是大趋势。
UWSNs 具有自组网、易部署、成本低、隐蔽性和容错能力强等特点[46],凭借着其越来越完善的功能,逐步取代了人工进行危险的水下工作。UWSNs 可完成对水下或者海底环境的信息收集、监视、监听、目标探测与跟踪等任务。其优越的海洋数字化性能不仅为开发丰富的海洋资源和科学调研提供了便捷的手段,同时也为国防安全和海洋作战提供了重要保障。水下传感器节点主要由1 个主控制器或CPU 组成。水下传感器节点由1 个CPU 进行控制,控制着接口电路与外部的传感器相连,外部环境信息由传感器进行感知,通过接口电路将原始环境数据传到CPU 里存储并进行数据处理,最后通过声调制发送给其他的网络节点。其内部结构如图1 所示。
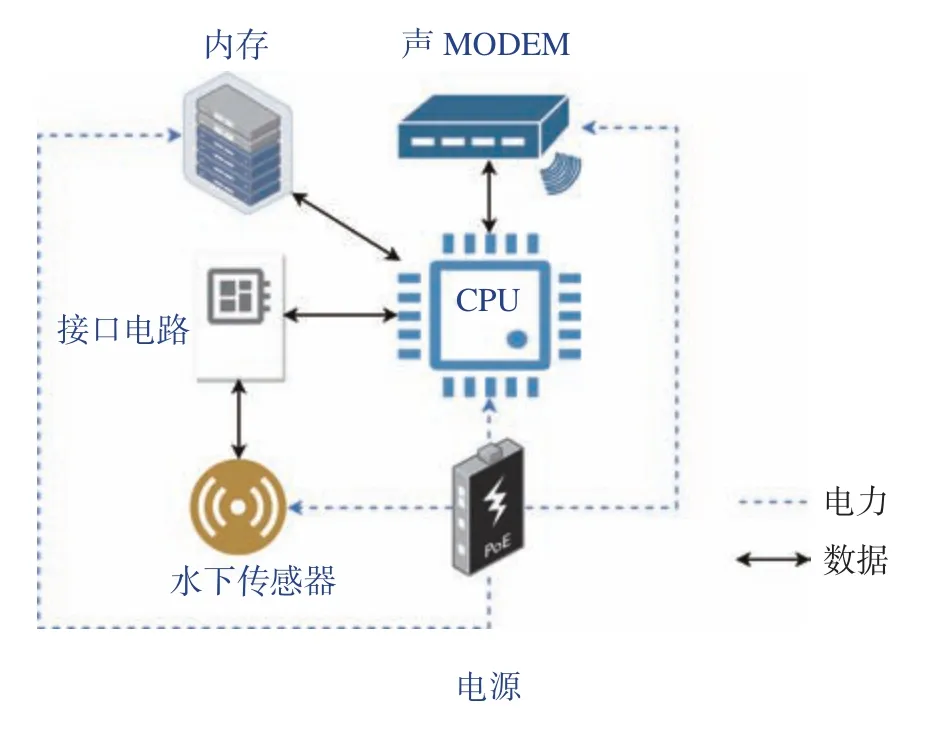
图1 水下传感器节点内部结构Fig.1 Inner structure of an underwater sensor node
2.2 UWSNs 拓扑结构和通信信道
2.2.1 网络拓扑结构
根据UWSNs 的组网形态和方式,其网络拓扑可分为集中式、分布式和簇状3 种结构。
UWSNs 根据任务需求来选择不同的网络拓扑,也可根据其投放空间结构区域的不同,大致可分为二维、三维和海洋立体监测网络3 种[47]。
1) 二维监测网络: 传感器节点被锚定在海底,收集海底信息并通过AUV 或者直接发往水面基站,再通过卫星通信等其他方式发送给用户。
2) 三维监测网络: 通过多AUV 或是水下滑翔机与固定传感器节点形成混合监测网络。
3) 海洋立体监测网络: 由水面的无线传感器网络与水下的无线传感器网络共同组成。水面的传感器网络通过无线电通信,可以进行精准的全球定位系统(global positioning system,GPS)定位,直接与卫星通信;而水面下的网络可以是二维或者三维,在UWSNs 中,AUV 在水下的通信对象主要是水面传感器节点、水下传感器节点、船舰与其他AUV。AUV 之间的通信是通过定位后获取精确位置,在近距离通过高数据速率传输协作控制信息。AUV 与船舰间的通信分成2 种: 一种是船舰在远距离以低速率发送信息给AUV;另一种是AUV 在近距离以高速率将水下收集到的图像等传感信息传输给船舰。而在与水下、水上传感器节点的通信也是在近距离用高数据速率进行数据交互式传输,此时AUV 充当中继节点的角色。
2.2.2 通信信道
由于水下环境复杂多变,简单地将陆地通信方法复制到水下是难以为继的。有线通信在广阔的水下环境进行部署是不现实的,而无线电磁波在水下衰减过于严重,无法满足水下数据传输的需求。水声相比于电磁波在水下传输时具有传输衰减少、传输距离长的特点,因此目前UWSNs 的通信主要采用水声通信。但是,水声信道相比于陆地上的电磁波信道和空中的卫星信道,依然存在传播速度、传输距离和信道带宽低好几个数量级的劣势,加上海水成分的复杂和易变对水声信道的影响,导致水声信道具有独特的时频特性和多径效应,使得水声信道受到的干扰和传输损耗极其严重。
传统的水声信道难以承载网络规模越来越大的UWSNs 的通信需求,近年来,基于神经网络优化算法的水声通信模型有效提高水声通信的有效性和可靠性[48]。同理,UWSNs 中的传感器节点可采用基于小样本的神经网络和迁移学习方法,使得UWSNs 在复杂多变的海洋环境中可以对水声信道进行快速准确的估计,以降低误码率。而在AUV 与AUV 之间以及AUV 与船舰之间的通信,由于AUV 的实时移动性导致其所对应的水声信道具有高动态的多径和多普勒双重扩展特征,严重影响通信质量。针对这个问题,李斌等[49]设计并实现了一种面向AUV、易于工程实现的低负载移动正交频分复用水声通信系统,该系统采用时频差分编码方案,互相关函数方法进行多普勒估计,并利用变采样率重采样进行多普勒补偿。Chen等[50]在利用压缩感知的脉冲噪声估计与抑制方法基础上,利用经过训练的深度神经网络代替迭代压缩感知恢复过程的深度学习方法,可以作为合适的替代方法。
2.3 UWSNs 发展现状
随着各国“智慧海洋”工程的茁壮发展,水下环境信息的获取、整合及传输愈来愈趋向智能化和无人化。各国的UWSNs 旨在建立收集精确的水下水面信息,完善可靠的传输体系,构建一个安全可控的海洋物理信息系统工程。
1) 美国。美国对于UWSNs 的研究一直处于世界领先水平,早在上世纪就制定了发展UWSNs的计划,开始对水下作战以及UWSNs 的发展进行了战略部署和长期规划[51]。在2017 年,美国国防高级研究计划局(Defense Advanced Research Projects Agency,DARPA)提 出Ocean of Things 计 划,以满足其未来军事需求和应对其他国家UWSNs发展带来的威胁。
2) 欧洲。欧盟于2003 年成功在沿海岸建立了一个用于水下环境监测的水声通信网络(acoustic communication network for monitoring of underwater environment in coastal areas,ACME)。欧盟科学家在2005 年实施了欧洲滑翔机观测网络(European gliding observatories network,EGO)计划,该计划的主要目标是协调正在进行的使用滑翔机的研究和未来研究的构想,以操作自主水下滑翔机队,以便为全球、区域的海洋发现和监测提供具有成本效益的方法。
3) 日本。日本在2003 年建立了水下观测网络,即先进区域实时地球监测网络(advanced realtime earth monitoring network in the area,AREMNA)。2011 年,日本部署了海底实时监测系统(dense ocean floor network system for earthquakes and tsunamis,DONET),旨在对海底地动-水压信号进行高效采集,从而监测日本海地震情况[52]。日本的AREMNA 与之后的DONET 一起成为了全球对海观测网的一部分。
4) 中国。我国提出“海洋兴国”战略方针,通过多年的技术储备,于2016 年9 月成功建成并运行了自主可控的“中国南海深海海底观测网试验系统”,如图2[53]所示,以及东海浅海海底观测网,对我国获取水下信息、保护水下安全具有重大意义。其他关于UWSNs 的研究成果还包括: 中国科学院自动化研究所基于机器人的移动传感器网络实时环境监测方案[54];中国科学院声学研究所、中国科学院沈阳自动化研究所和西安光学精密机械研究所共同研制成功的水下反恐传感器网络监控系统[55-56]等,此外,中国海洋大学在水下传感器网络和海洋立体监测网络领域开展了研究[57]。国内外对于水下无线传感器网络的发展历程如图3所示。
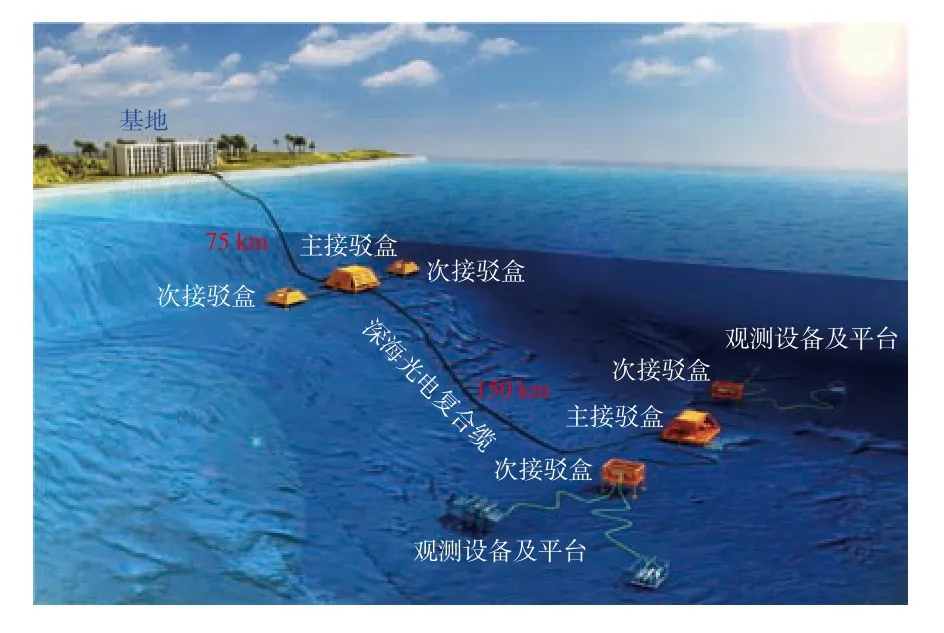
图2 南海深海海底观测网试验系统示意图Fig.2 Schematic diagram of test system for deep-sea seabed observation network in south China sea

图3 国内外水下无线传感器网络发展历程Fig.3 Development history of underwater wireless sensor networks at home and abroad
AUV 作为UWSNs 组成的一部分,是海洋勘探、监测和水下数据传输等任务能否顺利完成的关键之一。目前商业上比较成功的AUV 主要有5 个产品系列: Bluefin、Remus、Hugin、ISE Explorer和Gavia[51]。1989 年,美国工学院自主水下航行器实验室成功研制出Bluefin 水下航行器,而后成立了“金枪鱼”机器人公司,该公司从Bluefin-9 起步,相继研发了Bluefin-12、Bluefin-21 等型号。美国伍兹霍尔海洋研究所设计的Remus 100 是美国最成功的便携式水下航行器,为Remus 系列航行器中最小的一款。该航行器采用锂电池供电,以3 kn的巡航速度可连续航行22 h,最大航程达123 km。2015 年,美国加大了对这方面的投资。美国科学应用国际公司为DARPA 研制的反潜战持续追踪无人艇项目,艇体采用复合材料,暴露在水面上的部分以及雷达反射截面较小,具有很好的隐蔽性和浅海航行能力,航速达到27 kn,作战半径达到3 000 km,续航时间为3 个月,具有极佳的前沿部署能力及大范围反潜能力。各国大型AUV 系统型号及参数如表1 所示。
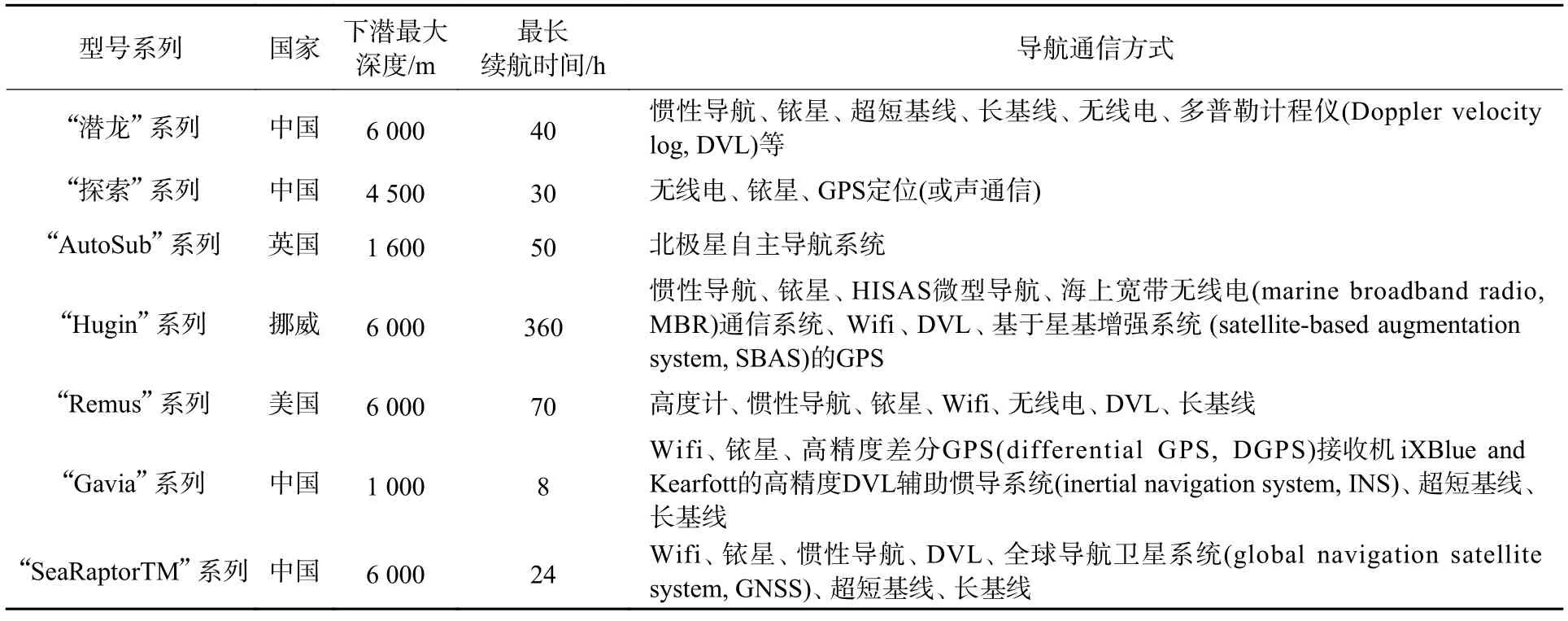
表1 各国大型AUV 系统型号及参数Table 1 Models and parameters of large-scale AUV in various countries
无论在军事,商用以及民用等领域,高质量通信成为一种越来越普遍的要求。在海洋通信中,由于水下信道自身存在着可用带宽有限以及严重的多径延迟效应和多普勒效应等诸多问题,如何克服海洋信道中的通信干扰是进行高质量水下通信的难点。因此,面对水下恶劣的通信环境和针对UWSN 各层的恶意干扰攻击,研究有效的抗干扰技术是保障UWSN 高质量通信的重要前提。
3 抗干扰技术在UWSNs 中的应用
UWSNs 中的水下传感器节点和AUV 等设备在海洋中执行探测、监视和拦截非法设备等任务都需要可靠的通信,但UWSNs 采用的水声通信信道的开放性和水下高传播延迟的特性使得UWSNs极易受到非法设备的恶意干扰。为了保护水声信道,避免UWSNs 受到过多恶意攻击导致通信瘫痪,研究有效躲避水下恶意干扰的UWSNs 抗干扰技术是急需解决的问题。UWSNs 常用的抗干扰技术主要可以分成物理层抗干扰、MAC 层抗干扰、网络层抗干扰、传输层抗干扰和跨层抗干扰技术。
3.1 物理层干扰种类与抗干扰技术
UWSNs 物理层主要遭受窃听攻击和拥塞干扰攻击,其中阻塞干扰攻击通过发送噪声等无用信号干扰物理层信道的数据流,以阻塞通信信道,对通信的可靠性造成极大的威胁。下面对不同的拥塞干扰类型进行简要概述。
1) 频率范围
根据干扰器的干扰频率范围不同,可将其分为单信道干扰和多信道干扰[58]。
单信道干扰[59]: 对于干扰器而言,其干扰频率是固定的,只在某一频率上进行干扰作业。由此,倘若干扰目标的频率已知,那么该干扰方式的效率将非常高,同时干扰器所消耗的功率也相对较低。
多信道干扰[59]: 与单信道干扰模式相比,多信道干扰有着更大的干扰频带范围,但是为了达到更好的干扰效果,该模式也需要耗费更大的功率,工作效率相对较低。
2) 频率类型
根据干扰器的干扰频率是否发生变化以及变化方式的不同,分为以下几种模式。
静态干扰[59]: 干扰器的工作频率不发生改变,只在一个或者固定一段频率内进行工作,这是一种相对简单的干扰模式,因而抗干扰方式也比较简单,跳出干扰的频率即可。
扫频干扰[60]: 扫频干扰可以根据扫频方式在周期和顺序上呈现的一定规律进行划分,如周期性扫频、非周期性扫频、顺序扫频以及无序扫频等。
随机干扰: 干扰器从目标频段中随机抽取一个频带进行干扰,也根据随机方式的不同继续往下细分。相较于扫频干扰,随机干扰模式频率选择的不确定性更强,干扰目标难以进行有效的干扰侦察。
3) 活跃时间
根据干扰器的活跃时间不同,对干扰模式进行不同的划分。
持续干扰[61]: 即干扰器持续地进行干扰工作,输出干扰信号。这种模式的缺点十分明显,那就是需要消耗大量的功率。
不定时干扰[61]: 干扰器在随机的时间段内进行信号干扰,在其他时间保持静默。这种模式相对于持续干扰模式节约了大量的能量。
固定时间干扰: 干扰器以一定的规律进行干扰,比如脉冲干扰模型,干扰与静默交替进行,持续时间相同。
在物理层抗干扰应用中,水声信道的特性使得常规的抗干扰技术如跳频扩频和直接序列扩频无法直接移用到UWSNs 上[62]。在无线电通信中,利用博弈论与强化学习等手段可以有效躲避干扰器的干扰。强化学习可以在没有先验知识的情况下,通过不断试错,获取奖励来得到当前最佳动作,并通过未来奖励的最大和来获得每个阶段的动作。博弈论已经应用于人工智能领域进行辅助决策,如生成对抗网络。因此,物理层抗干扰技术结合博弈论、强化学习和深度强化学习等方法使得UWSNs 获得了有效的水声通信抗干扰方法。
Xiao 等[63]将抗干扰博弈论的研究扩展到了水下网络,推导出了UWSNs 在静态干扰博弈中纳什均衡的闭式解,并采用强化学习来解决在干扰器信道参数未知情况下的水下传感器节点学习功率控制问题。随后,Xiao 等[64]采用了深度Q 网络进行学习,有效解决传统的 Q 学习在处理大规模问题(如信道数量过多)时面临的维度灾难问题,并加快了算法的收敛速度。之后,Xiao 等[65]提出了一种基于强化学习的中继节点空间位置和功率控制算法,在无需掌握干扰模型和信道参数的情况下,使得UWSNs 可进行可靠的信息传输。该算法在引入卷积神经网络后可加快学习速度,使得UWSNs 可以获得最优中继策略,以提高中继节点抗干扰能力。此外,Su 等[66]提出了一种具有协作干扰信号的自辅助节点的物理层安全传输方案ST-CJ,利用水声传播中的长传播延时特性,使数据包在干扰器处产生碰撞,但不影响正常传感器节点的有效传输。
3.2 MAC 层干扰种类与抗干扰技术
MAC 层的干扰种类可以分为干扰攻击、碰撞攻击、力竭攻击、拒绝睡眠攻击和不公平攻击[67-68]。其中,干扰攻击是指干扰器通过重复发送RTS(request to send)数据包,占据信道的使用权限,使得其他传感器节点无法正常使用信道。其干扰方法利用了MAC 层协议的漏洞,抢占信道使用优先级。碰撞攻击一般是指干扰器通过一些手段,如: 通过相同的频率与正常传感器节点通信,或是在RTS/CTS(clear to send)的握手机制中,在干扰器节点收到CTS 后,立刻发送数据包,其目的是让正常传感器节点传输数据包与干扰器节点发送的数据包产生冲突。力竭攻击是指通过引入恶意干扰器节点,使正常传感器节点一直处于繁忙状态,导致电池能量加速消耗直至耗尽。发送完信息后,节点会主动进入睡眠模式节能。拒绝睡眠攻击是指不让节点进入睡眠模式[69],通过重复握手或是不断处理RTS/CTS 信息,从而消耗传感器节点的能量。不公平攻击并不像前几种方法一样针对某个节点,而是以牺牲效率为代价,由攻击者执行攻击,从而降低整个网络的效能。
针对以上的干扰攻击种类,现有的MAC 层抗干扰方法可以通过更安全的MAC 层协议来实现更可靠的传输。Hu 等[70]提出了一种安全时间同步机制,对调整传感器节点的睡眠-唤醒模式起着重要作用。Xu 等[71]针对水下传感器节点成簇后的水声传播提出了基于集群的安全同步协议,通过身份验证、簇内同步以及簇间同步等3 个阶段,将时间同步所需的能耗大大降低,但由于需要3 个阶段才能达到时间同步,实时效率方面略有缺陷。针对碰撞攻击的抗干扰策略可以是纠错码的有效应用,Pu 等[72]提出了利用串通冲突技术来解决串通冲突攻击问题。可以用速率限制器来限制每个节点的发送及接受速率,有效缓解力竭攻击带来的问题,但同时整个网络的性能会受到一定的影响。Kamales 等[73]基于模糊的安全入侵检测系统,提供身份验证及传输数据完整性,同时利用时钟的入侵检测方案,识别并隔离水声网络中的干扰器节点。Fotohi 等[74]通过RSA(Rivest Shamir Adleman)加密算法和互锁协议来抵御拒绝睡眠攻击,基于leach 和Hopfield 神经网络的萤火虫算法,保护无线传感器节点免受拒绝睡眠攻击。目前,拒绝睡眠攻击主要是以加密算法进行抵御。
3.3 网络层干扰种类与抗干扰技术
针对网络层的攻击主要有以下几类: 重放攻击、选择转发攻击、误导攻击、天坑攻击、女巫攻击、虫洞攻击、灰洞/黑洞攻击和归巢攻击。
重放攻击是指干扰器拦截发送节点与接收节点的数据包,但是经过一段时间后又将此数据包发送给接收节点,导致接收节点对发送节点的位置判断失误。选择转发攻击是指干扰器伪装成正常的传感器节点收发数据包,但是有选择性地丢弃一些数据包或是转发一些数据包,这种兴趣抑制可以减少对其错误行为的怀疑[75]。误导攻击是指干扰器通过将数据包重新定向到其他路由,导致数据包的路由路径更改,无法抵达接收器节点。黑洞攻击是指干扰器节点向正常传感器节点广播修改后的路由信息,即到干扰器节点有最低的路由成本,以此来捕获一个区域内所有的数据包;灰洞攻击是指当成为黑洞节点的干扰器删除了一些关键的数据包信息后,此黑洞攻击变成了灰洞攻击,但此攻击会对部署在离干扰器节点较远位置的传感器节点有破坏性,因此可以用丢弃一些必要的数据包的方法来逃避怀疑。天坑攻击是灰洞/黑洞攻击的升级版,具体是干扰器节点尽可能靠近簇头节点,接着传播虚假的路由信息,以此尽可能多地捕获簇头节点发给基站或水面节点的信息。虫洞攻击指的是由2 个或者多个干扰器组成的路由路径代价小于原本的路由代价,以此形成了由干扰器节点参与的路由路径,后果是源节点发送的数据包被捕获,并且源节点不能选择或发送给其他路由。归巢攻击是指干扰器通过分析数据包或流量,找到一些具有特殊职责的传感器节点进行攻击(比如簇头节点),这种对特殊节点的攻击更具有破坏性。女巫攻击的目的是拒绝信息传递,干扰器可以伪造多个身份并且出现在不同地方,这些身份可以是通过伪造新标识或是制造故障来窃取合法身份,这对正常传感器节点的位置判断容易造成影响,对基于位置信息的路由协议影响较大。
现有的网络层防御策略包括了干扰器检测与检测干扰器之后的重新感知路由2 个阶段。针对上述网络层的干扰技术,已经有一些抗干扰技术应用。Ibragimov 等[76]提出了一种基于安全算法的RTS/CTS 发送机制水下媒体控制访问协议,适用于水声传感器网络,实验验证了该协议既节能又节约时间,能很好地应对重放攻击和选择转发攻击。Ahmed 等[77]提出了用于检测恶意攻击的算法,利用Dempster-Shafer 理论结合上流量、数据等方面进行证据评鉴,用来检测UWSNs 中的恶意攻击。Lim 等[78]提出了逐跳检测方案,该方案可快速降低干扰器节点的丢弃概率以提高交付率。Jiang 等[79]通过对节点的行为进行信誉评估与信任管理,可以将不信任的节点隔离。应对误导攻击,Saini 等[80]的防御机制可以通过计算每跳延迟检测出干扰器身份,但该方法需要精确的节点定位信息,因此很难适用于水下多变的环境。应对灰洞/黑洞攻击,Rathiga 等[81]利用初始化信息,计算信息距离指标确定阈值,以此来检测想成为黑洞/灰洞的干扰器节点。Rani 等[82]利用人工神经网络结合基于群体的人工蜂群优化技术,通过为数据包选择好的传输节点来提高系统性能。Taylor 等[83]在每个节点上都安装了看门狗机制与轻量级的专家系统来检测黑洞行为,但同时这也会加重节点负担。应对天坑攻击,可以采用一种入侵检测系统,用基于签名的技术来区分真假宿节点[84]。应对虫洞攻击,Zhang 等[85]提出了利用现成基本功能声学信号到达方向来估计虫洞,实现虫洞弹性安全邻居发现。Dargahi 等[86]利用一种分布式方法检测虫洞攻击,并提出一个分析模型用来捕获各个参数之间的相互作用。女巫攻击可以用节点成对认证或位置认证的方法来缓解,但是由于水下传感器节点位置信息的不确定性,位置认证的方法比较难以实现。Yavuz 等[87]借鉴了身份认证的思想,采用随机成对密钥预分配的方法抵御女巫攻击,该方法基于密码学原理。Islam等[88]提出了一种新型认证机制,通过节点 ID 和存储在簇头中的数据对相邻节点进行身份验证,且该方法易于实现。Arifeen 等[89]将以前的模型结合区块链技术,用来检测水下网络中的女巫攻击。Li 等[90]基于节点状态来判断发起女巫攻击的干扰器节点,通过信标节点记录的通信频率及剩余能量之间的关系判断女巫节点。应对归巢攻击的策略可以是标头加密,但仍然不能完全阻止干扰器节点进行流量分析从而找出特殊的传感器节点。Chen 等[91]提出了一种反流量分析的策略,通过传输一些没用的数据包进行伪装,隐藏起簇头的位置,但是该方案的缺点是要传输更多的数据包,导致网络性能降低。
3.4 传输层干扰种类及抗干扰技术
针对传输层的干扰攻击主要有去同步攻击和同步洪泛攻击2 种。去同步攻击针对的是在传输数据包的2 个节点同步信号,干扰器通过伪造序列号的数据包使接收节点的去同步控制信号失效,以此破坏2 个节点之间的合法连接。同步洪泛攻击是指干扰器节点通过发送源源不断的连接请求,直到每个连接所需要的资源耗尽。
针对传输层的干扰技术种类,Shah 等[92]提出利用同步序列号 cookies 对来自客户端的TCP SYN进行编码并回复给客户端,不用再经过服务器。利用TCP 可靠传输的特性进行安全保障似乎是很好的选择,但由于TCP 建立连接及拆除连接所需要的过程过于繁琐,该方案并不适合UWSNs。
3.5 跨层抗干扰技术
传统开放式系统互联(open system interconnection,OSI)分层设计有效地保护了分层信息不被误用,但如果低层被攻击,高层获取不到低层的信息,便无法恢复受干扰的数据。因此,在整个网络结构堆栈中共享所有的相关信息可以使节点工作更加协调,每层都设计成单一和协调的单元进行工作。跨层设计可以运用于许多方面,如进行协作通信中的中继节点选择[93],或实现通过合作的最佳资源分配,平衡整个UWSNs 的能量[94]等。这些模型有效利用了跨层设计的优点,但是他们在频谱方面的利用率不高,也没有适当地对数据进行调度与传输,导致许多数据包会发生冲突。Bagali 等[95]的研究实现了高效信道分配,检测干扰节点并有效利用频谱。该方法提高了网络吞吐量,但同时丢包率也在上升,并且该方法仅适用于反应式干扰器,适用范围太窄,无法投入过于复杂的网络环境中。Xu 等[96]提出了面向基于集群的UWSN 安全介质访问控制协议,利用MAC 层协议(SC-MAC)解决网络层的重放攻击,同时考虑了链路质量以及调制解调器电池的剩余能量,在相互认证成功后,来自不同集群的所有传感器节点都可以在连续通信中保护数据传输。
4 总结与展望
随着博弈论和机器学习的应用,抗干扰技术在过去10 年获得了飞速发展。但对于UWSNs 抗干扰技术的相关研究还较少,尚处于起步阶段。文中介绍了UWSNs 的特性,并对抗干扰技术及其在UWSNs 中的应用和研究进展进行了归纳。
未来的UWSNs 逐渐显示出部署密集化、范围广阔化以及水下干扰器逐渐智能化的趋势。相应的,UWSNs 的抗干扰技术应围绕未来的UWSNs特性和干扰器特性进行发展。
1) 部署密集化: UWSNs 密集部署时不仅面临着系统外部的恶意智能干扰,还将面临系统内部合法用户间的互扰问题。因此,如何同时解决最小化UWSNs 合法用户间的资源冲突和最大化抗干扰性能这2 个耦合问题,是未来解决UWSNs 密集部署时有效抗干扰的重点研究方向。
2) 范围广阔化: 为节约UWSNs 大范围的部署成本,AUV 的大量使用是大势所趋。随着能源动力技术发展和对海洋更远、更深区域进行作业的需求进一步扩大,AUV 跨越的范围和移动速度进一步提升。因此,AUV 面临着大幅度的海洋环境变化问题。针对此,应着重研究迁移学习,将AUV先前学习的抗干扰知识迁移到当下的抗干扰问题中,以提高常规的强化学习算法的学习速度。且AUV 可利用其高移动性,在频域、时域和功率域抵抗干扰器的同时,在空间域(水下)躲避干扰器的干扰。
3) 干扰器智能化: 随着水下干扰设备智能化发展,如何采用博弈论和机器学习方法,以“博弈权衡收益”、以“智能对抗智能”,提高UWSNs 在水下复杂干扰环境中,即存在水下智能干扰情况下的通信可靠性,是未来UWSNs 抗干扰技术的研究重点。
猜你喜欢
纺织科学研究(2021年1期)2021-12-03 15:04:42
电子制作(2019年22期)2020-01-14 03:16:52
传媒评论(2019年5期)2019-08-30 03:50:18
时代英语·高一(2019年1期)2019-03-13 10:29:48
网络安全和信息化(2018年4期)2018-11-09 12:01:54
北京信息科技大学学报(自然科学版)(2016年5期)2016-02-27 06:31:42
华东理工大学学报(自然科学版)(2015年4期)2015-12-01 04:00:44
电子设计工程(2015年8期)2015-02-27 12:05:33
中国新通信(2014年11期)2014-09-11 19:27:52
现代防御技术(2014年6期)2014-02-28 18:26:23