
轮毂驱动电动汽车再生制动能量分配策略研究
2023-03-14 03:49:32杨亚会付勇智
重庆理工大学学报(自然科学) 2023年2期
许 洋,周 奎,杨亚会,杨 倩,付勇智
(湖北汽车工业学院, 湖北 十堰 442002)
0 引言
电动汽车具有洁净、智能、可持续发展等优势,但续航里程不足,制约其普及和应用[1-3]。再生制动能量回收技术可以将车辆在减速或滑行过程中的部分动能转化成为其他形式的能量,并通过再生系统进行存储,可高效提升能量利用率[4]。分布式驱动电动汽车结构布置灵活,集驱动、传动和制动系统为一体,每个电动轮都具备再生制动功能,技术应用前景广阔,因此,面向分布式驱动电动汽车进行制动反馈研究对延续车辆的续航能力具有现实意义。
当前,对于分布式驱动车辆的再生制动研究多为前、后轴制动力分配,每个电动轮制动器制动力和再生制动力方面。滕冬冬[5]基于电动轮汽车,在保证制动效能和安全基础上,把前后轴制动力趋于I曲线进行分配,进一步提高了能量回收率。Gao等[6]将防抱死制动系统和再生制动系统协调控制,基于踏板行程分配制动力,可实现非常规制动时的制动稳定性和能量回收最大化。Yanase等[7]对比了前、后车轮制动力按理想曲线分配时,分别采用两轮和四轮回收能量时的差异,验证了在不同载荷变化时,采用四轮回收策略的能量回收率均明显高于采用两轮的回收策略的能量回收率。单鹏等[8]提出当制动强度较轻则制动力由前轴提供,反之,再由后轴电动轮一同承载。基于现有研究,在制动力矩分配时,对于控制技术先进、驱动系统复杂的电动轮驱动电动汽车,还应将前后桥电机的工作能力不同对制动力分配的影响纳入考虑范畴,进而保证电机制动参与程度最大化;同时将再生制动与防抱死系统的协调控制考虑其中,继而满足电机高效回收制动能量的同时预防车轮抱死,确保车辆制动稳定性。
本文面向分布式驱动电动汽车,以制动反馈策略为研究,主要内容包括:① 轮毂电机、动力电池等总成参数匹配;② 前、后桥制动力分配限值控制线的分梯次优化设计,且制动力矩遵循前、后轴电动机功率的不一致特性进行合理地分配;同时结合滑移率控制再生制动与防抱死系统的博弈,进而保证单轴上电机反馈制动介入的优先性和参预程度的最大化;③ 在Matlab/Simulink环境中构建完成了再生制动反馈模型,将设计的控制策略镶嵌其中,同时基于UDDS典型循环工况,验证了优化控制策略的可行性,同时对制动舒适性进行了评价。
1 再生制动系统结构与工作原理
分布式四轮毂电机驱动电动汽车再生制动系统结构布局如图1所示。制动系统包括由液压主缸、4个制动器等组成的液压制动系统,以及由电动轮、动力电池、再生制动ECU等组成的其他部分。系统控制层级分为3层:最高级是包含集成制动控制策略的整车VCU控制器;第2层包含轮毂电机控制器、再生制动ECU,主要功能是协调再生制动和传统机械制动的制动力矩分配;复合控制系统中除去控制器以外的执行器部件为第3层级[9]。车辆滑行或制动时,制动踏板行程传感器、电动轮传感器将车速和踏板下压程度的模拟量信号传递给再生制动控制器,同时控制器解析制动意图并解算得到需求的总制动力、电机能承载的最大电制动力,同时依照控制策略对前、后轮再生制动力与制动器摩擦制动力进行匹配,此时电动机处于发电模式,将部分动能变更为电能,反充到动力电池中,进而实现再生制动能量回收[10]。

图1 四轮毂电机驱动电动汽车再生制动系统结构布局框图
2 动力系统参数匹配
电动汽车的核心在于其搭载的动力系统,同时轮毂电机和动力电池组等作为动力系统的关键构成部件,各参变量的恰当配比将有助于提升整车的动力性,也利于车辆使用经济性[11]。本小节进行动力系统各关联参变量的配比,为设计和搭建再生制动能量回收系统,分析制动能量回收机理以及计算制动能量回收率提供遵循。
2.1 整车参数、轮毂电机和电池参数匹配
四轮毂驱动电动汽车整车主要技术参数如表1所示。同时在表1参数及动力性能指标的基础上对动力电池和前后轴轮毂电机参数进行匹配[12],如表2、3所示。
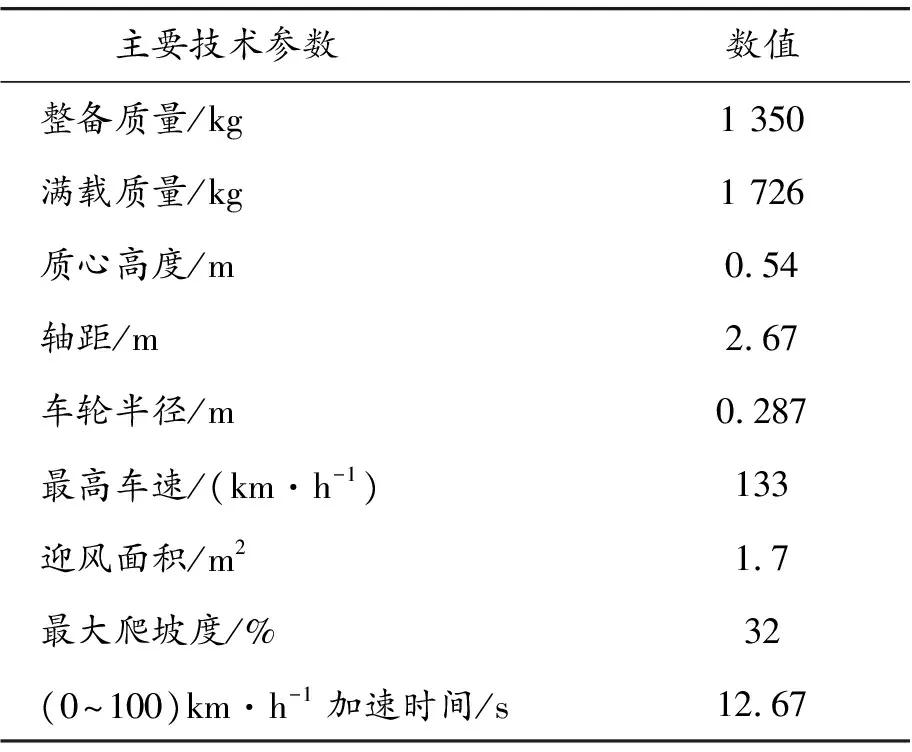
表1 轮毂驱动电动汽车整车主要技术参数及动力性能指标

表2 动力电池参数

表3 前后轴轮毂电机参数
2.2 轮毂电机最大制动力矩
轮毂电机具有低速定转矩,高速恒功率的运行特点[13],为保证车辆制动安全性,以及电动机产生的逆电动势给动力电池充电的有效性,设置电制动转速阈值为260 r/min,即转速高于阈值时,车辆进行能量回收。最大制动力矩与转速和功率关系为:

(1)
式中:Tm_Max为轮毂电机可提供的峰值力矩,包含Tfm_Max和Tbm_Max,即单个前、后轴电机相应转速下的最大电机制动力矩,N·m;TMax为轮毂电机最大转矩,N·m;PMax为电机峰值功率,kW;nd=260 r/min;n为电动机运转速度,r/min;nb为电机基速。
2.3 充电电流与动力电池SOC
能量回收过程中,动力电池充电电流值正相关于轮毂电机的制动力矩[14],表示为:
(2)
式中:Im为电池电流;ηm为电动机充放电效率;T为单轮毂电机制动力矩;Uec为动力电池路端电压。选用安时法对电池荷电状态进行估算[15]:
(3)
式中:SOCinit为动力电池初始值;Qcap为荷电容量;ηb为安时效率。
3 制动力分配控制策略
在确定轮毂驱动电动汽车整车结构、储能装置和动力系统等参数之后,制动力分配控制策略成为提升再生制动能量回收效益的核心要素[16]。
首先,引入滑移率S为无关因子来确保车辆在非常规制动时的制动效能。滑移率在 0.2 时,车辆的横向和纵向附着系数都处于较大位置[17],大于0.2时,则横向附着系数急速衰减。为避免车轮抱死,以及增大车轮对地面的附着利用率,设置滑移率上限值为 0.2[18]。超过设定值时,ABS开始工作,关闭再生制动模式;当S<0.2时,继续回收电能。基于车辆制动安全性,为保证能量回收的有效性,还需满足电动机反馈制动转速阈值nd≥260 r·min-1且动力电池SOC<90%。
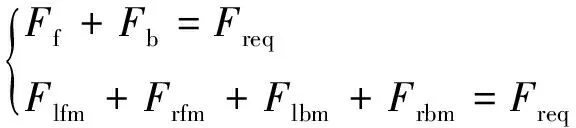
接着,基于总需求制动力Freq,车辆制动时前、后轴制动力Ff、Fb,前、后轴上电机再生制动力Ffm、Fbm,前、后轴上单个电机的最大再生制动力Ffm_Max、Fbm_Max,前、后轴上摩擦制动力Fff、Fbf,滑移率及动力电池SOC值设计再生制动控制策略,同时依据汽车理论和我国的国家标准 GB 12676—1999以及ECE R13法规对双桥车辆前、后轮制动系统制动力的分配要求和规定[19],将具体实现步骤分为两大阶段,3种模式。图2为优化再生制动安全范围后的前、后轴制动力分配限值控制曲线。
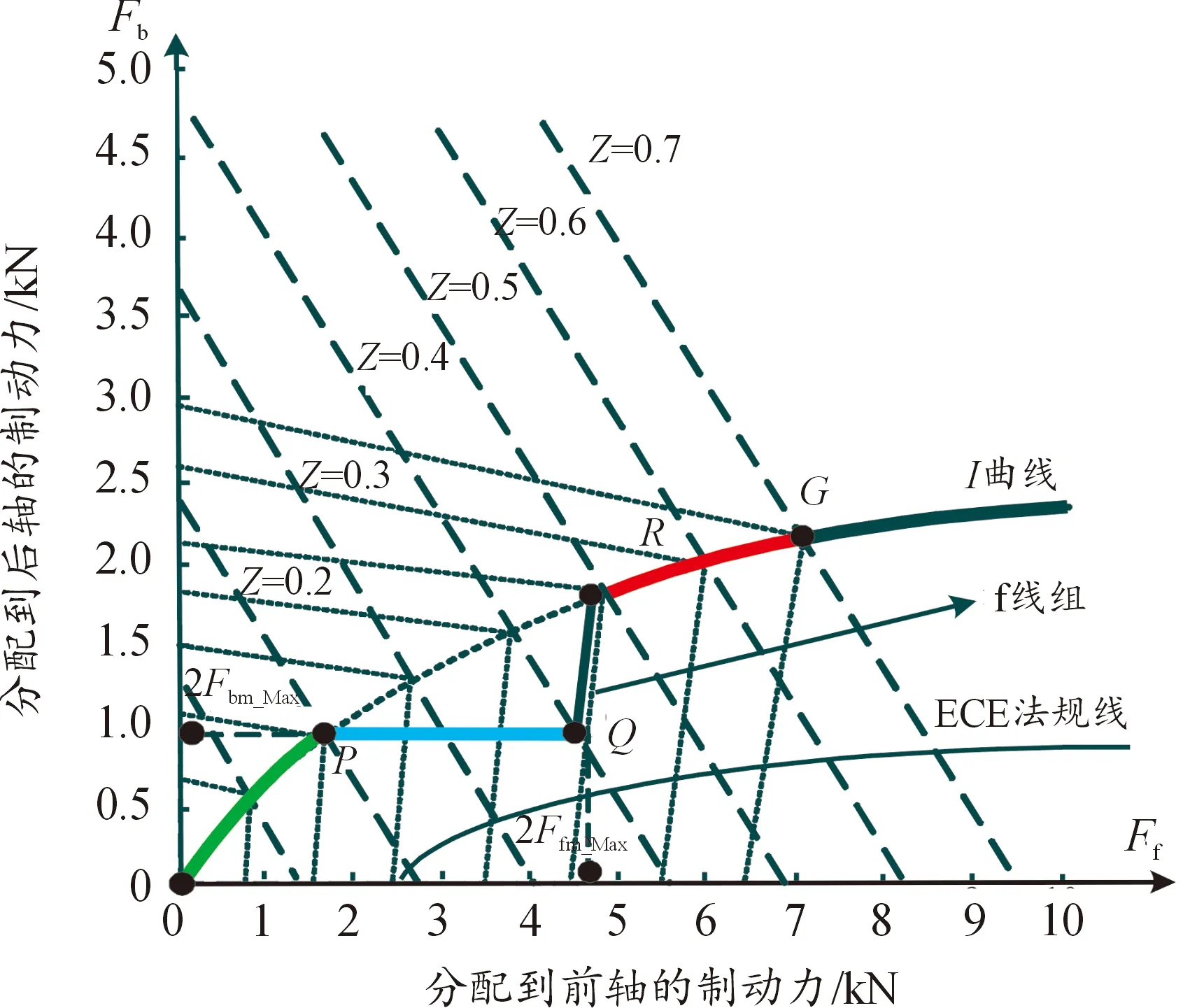
图2 优化的前后轴制动力分配限值控制曲线
3.1 前、后轴上的制动力分配
即阶段一:车辆处于制动或者滑行状态时,车辆控制器依据当前车辆的车速和时间,由式(4)计算得到此工况的制动强度z,同时由再生制动控制器解算得到需求的整车总制动力Freq。由整车需求制动力Freq、制动强度系数z以及前、后轮同时抱死的理想整车制动动力学模块受力分析,即进一步由式(4)—(6)可得到按I曲线分配理想的前、后轴制动力FF与FB。同时制动控制器模块依据当前车辆运行态势、动力电池SOC等,计算出相应单个前、后轮实际可提供的最大再生电机制动力Ffm_Max和Fbm_Max。
(4)

(5)
(6)
式中:L为轴距,m;La、Lb分别为汽车质心到前、后轴中心线的距离,m;hg为质心高度,m;G为车辆总重力,N;Ff、Fb分别为前、后轴制动力,N。
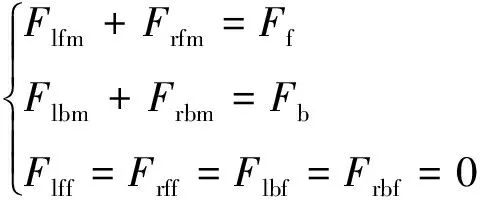
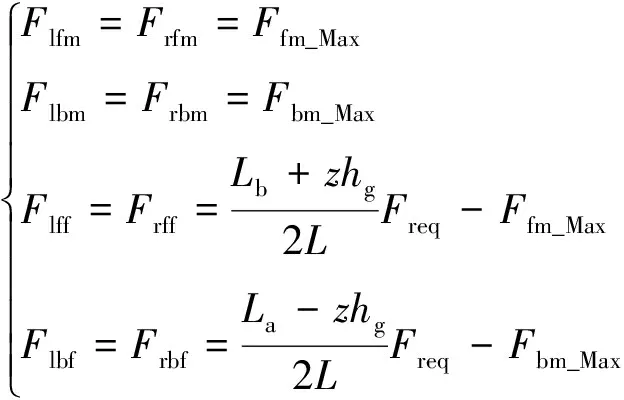
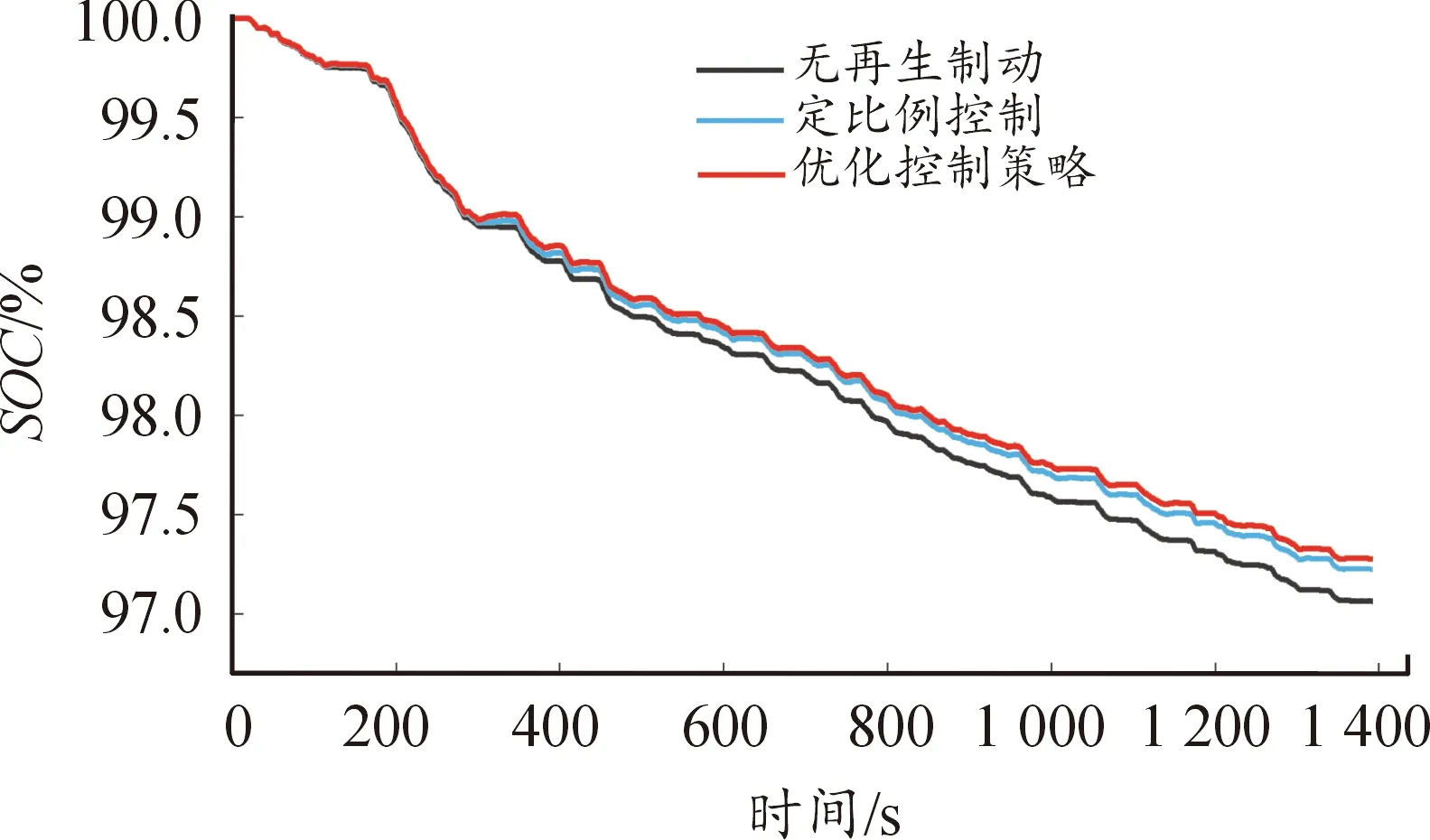
1) 当2Ffm_Max>Ff且2Fbm_Max>Fb,此状态时制动强度为0≤z (7) 式中:Tfm_Max和Tbm_Max分别表示单个前、后轮实际可提供的最大再生制动力矩,N·m;r为车轮滚动半径,m;Ff_Max为制动力分配限值控制线所决定的前轮制动力的最大值,N。 (8) 式中:Flfm、Frfm、Flbm、Frbm分别为左前、右前、左后、右后轮毂电机制动力。 2) 当2Ffm_Max>Ff且2Fbm_Max 3) 当2Ffm_Max (10) 式中:φ为路面附着系数;zQ、zR分别为各点制动强度。 即阶段二:基于上阶段控制策略在前、后轴上分配的制动力,分别对前、后轴上的各轮毂电机进行制动器制动和电制动的分配(见图3)。 1) 当该轴上轮毂电机可提供的最大电机制动力大于其分配到的制动力时,即2Ffm_Max≥Ff或2Fbm_Max≥Fb,则该轴全部制动力由电机通过再生制动进行。 (11) 2) 当该轴上分配到的制动力已逾越轮毂电机可提供的最大电机制动力,即2Ffm_Max (12) 式中:Flff、Frff、Flbf、Frbf分别为左前、右前、左后、右后轮毂电机机械制动力。 由式(4)—(12)可得到不同制动强度时,各电动轮反馈制动力和机械制动力。 图3 再生制动能量回收优化控制策略流程框图 为验证分布式驱动电动汽车再生制动能量分配优化控制策略的可行性,设定整车在中附路面进行UDDS典型循环工况仿真试验分析;同时将减速度变化率作为制动舒适性评价指标进行验证。 选取车辆制动强度较高且制动次数频繁的UDDS工况作为仿真工况。设置道路路面为中附路面,两侧路面附着系数为0.6,通过与无再生制动、传统定比例提供制动力的再生制动能量回收策略对照分析。 图4为循环工况中的实际车速曲线,可知在整个UDDS循环工况中,车辆速度保持效果较好,最高车速91.25 km·h-1,最大制动减速度为1.48 m·s-2同时循环中各制动区间的制动强弱程度分化清晰。 图4 UDDS工况下车速曲线 图5为车辆在循环工况中,总需求制动力矩和电机总需求制动力矩以及制动器摩擦总制动力矩的力矩分布曲线。由图可知,在制动强度不大时,制动以电机制动提供为主,同时制动力均按照电机的最大制动功率图来分配,传统制动器机械制动占比较小。转速较高时,液压制动发挥作用较明显,这也是由电动机的工作特性所决定,即在电机高转速状态下可提供的转矩较小,则电机转矩不能满足当前制动强度时的需求制动力,所以需要液压制动力参与来补充总需求制动力。综上可知,提出的优化能量回收策略能够较好的统筹协调车辆制动过程中,电机反馈制动与液压制动的力矩分配以及两者力矩的介入和撤出。 由图6可得,循环工况中分配到左前轮的电机反馈制动力矩明显大于左后轮,表明车辆在制动时,前轴轮毂电机参与再生制动程度更为显著。通过比对图6单轮力矩分布曲线可得,当后轴电机制动力已达到实际可提供的最大值时,前轴电机的再生制动力矩尚在增加,这表明,设计的优化控制策略可以保证后轴轮毂电机最大限度发挥再生制动能力,且可实现前轴轮毂电机最大化参与再生制动工作,再生制动整体参与限度得到提升,即验证了制动模式2的有效性。 图5 总需求制动力矩与电、液制动力矩分布曲线 图6 优化控制策略下单轮再生制动力矩分布曲线 为进一步验证优化控制策略的能量回收效果,同样采用经典城市循环工况UDDS工况对优化分配控制策略、无再生制动控制和传统定比例控制进行对比仿真分析,将SOC变化情况作为评价指标,同时动力电池初始SOC值设为100%。 由图7动力电池SOC仿真曲线可知,优化控制策略下的SOC值变更趋势更为迂缓,同时曲线上许多的“小幅波动”也表明,动力电池正在有效、连续和动态交替地进行充电和放电;由图8优化控制策略制动反馈能量积聚值仿真曲线和表4可得,在UDDS循环工况中,优化控制策略下累计接收能量为0.126 kW·h,相比于传统四轮毂定比例控制方案增加了7.7%;同时优化控制策略仿真结束的SOC为97.28%;传统四轮毂定比例方案下结束的SOC为97.23%;无再生制动功能时结束的SOC为97.07%。综上,相比于普通定比例控制和无再生制动功能的控制方案,采用提及的优化控制策略使得UDDS循环工况下的能量消耗分别减少了1.99%和7.30%,且节能效果为7.29%。 图7 动力电池SOC值仿真曲线 图8 再生制动能量积聚值仿真曲线 表4 节能效果 为更好对协调控制效果进行检验,选择制动时车辆的稳定性作为评价指标[20],即探讨车辆的滑移率以及车辆的车速与轮速的偏差值。 参考UDDS循环工况,模拟当前车速30 m/s,两侧附着系数为0.6,车辆无转向信号,即同轴的左、右轮毂轮速及其滑移率状态一致[21],此时将前轮和后轮作为研究对象。由图9可知,制动前0.2 s内,由于制动强度较小以及路面附着系数较大,车辆前轮、后轮轮速和车速偏差较小,即滑移率跟踪迅速、准确,且前后车轮均未出现抱死倾向;随着制动强度的增加,约0.4 s时,前轮出现偏差,略有抱死趋势。对于后轮,出现车轮抱死趋势约在1.2 s时,分析结果与图10中车轮滑移率变化曲线一致。由图10可得,本段制动过程中,前后轮滑移率均保持在0.15~0.2区间,此时车轮滑移率保持在最优滑移率附近,即车轮和路面接触处于稳定附着区,此时整车纵向附着系数具有最大值,路面附着系数利用程度较高,车辆具有最大的地面制动力,同时可保证汽车制动时方向稳定性和操纵能力[22]。在t=4.22 s时,车辆出现轻微拖滑现象,但此刻的车速小于等于3 m/s,对行车安全影响较低。 图9 参考车速与轮速变化曲线 图10 车轮滑移率变化曲线 制动舒适性是驾乘人员对制动“急”或者“缓”的主观感受[23],制动感受也是研究车辆制动稳定性的重要参考因素。同时车辆制动时,制动冲击度应小于10 m·s-3,此范围内的减速度变化率具有最好的制动效能和最佳的驾乘感受[24]。 由图11可得,采用优化控制策略车辆的减速度变化率aj小于10 m·s-3,减速度变化率幅值相比于定比例控制减小4.2%,即表明提出的再生制动优化控制策略,在车辆进行再生制动过程中,车辆的冲击度处于较好的范围内,制动舒适性良好。 图11 UDDS工况车辆减速度变化率曲线 1) 基于前后桥电动机功率的不一致性分配制动力,在后桥轮毂电机达到可提供的电制动峰值后,使得前桥电动机继续参与再生制动,有效提升了电机反馈制动整体参与程度;同时通过比较需求制动力与电机最大制动力大小,将制动过程分为2个阶段,3种模式,接着对单轴上电-液制动力矩进行优化分配,实现了电机反馈制动参与最大化,可进一步改善车辆使用经济性。 2) 基于车辆滑移率控制再生制动与防抱死系统间的博弈,优化控制策略可在满足车辆高效回收制动能量的同时预防车轮抱死,确保了车辆制动稳定性;同时车辆制动舒适性良好。 3) 道路两侧不同附着系数对能量回收效率以及制动稳定性影响也较大,下一阶段研究时,应综合考虑两侧路面不同附着系数对再生制动的影响;同时结合电动轮特点,就机电协调制动控制方面存在的容错控制和优化控制进行更深入探究。

3.2 同轴轮毂电机电、液制动力分配

4 仿真及结果分析
4.1 再生制动能量回收性能验证





4.2 制动系统制动性能分析验证


4.3 制动舒适性分析验证


5 结论
猜你喜欢
上海涂料(2021年5期)2022-01-15 06:09:26资源信息与工程(2021年5期)2022-01-15 05:37:42少儿科学周刊·少年版(2020年9期)2020-03-04 11:38:12制造技术与机床(2017年10期)2017-11-28 05:24:18制造业自动化(2017年2期)2017-03-20 14:26:14山东青年(2016年12期)2017-03-02 18:22:48光学精密工程(2016年6期)2016-11-07 09:08:02航天制造技术(2016年6期)2016-05-09 08:32:51大型铸锻件(2015年1期)2016-01-12 06:33:29探测与控制学报(2015年4期)2015-12-15 15:00:56
