
脱壳弹弹托分离的双目视觉测量*
2023-03-09 00:36:04李湘平鲁军勇李松乘
国防科技大学学报 2023年1期
李湘平,鲁军勇,张 晓,程 龙,李松乘
(海军工程大学 舰船综合电力技术国防科技重点实验室, 湖北 武汉 430033)
脱壳穿甲弹的弹托分离过程存在机械和气动的扰动,这导致分离过程对弹体飞行稳定性和作战效能影响较大[1]。目前国内外对脱壳穿甲弹弹托分离的研究大多采用理论建模和数值仿真方法。
文献[2-3]采用理论解析的方法对弹托分离过程中的受力和运动情况进行了分析。其中文献[2]采用分段模型简化的方法,基于激波理论和膨胀波理论,对尾翼稳定脱壳穿甲弹的弹托迎风窝、弹托的下表面、弹体头部阻力以及尾翼阻力进行了理论建模和仿真计算;文献[3]基于一维非稳定流场控制方程,对尾翼稳定脱壳穿甲弹弹托分离过程中的冲击力公式进行了推导,给出了弹体和弹托的运动方程和转动方程,结合推导公式仿真分析了弹体的六自由度运动情况。由于解析法无法模拟高超声速弹托分离过程中的湍流现象,导致解析法得到的仿真结果与试验相差较大。
文献[4-6]基于动网格技术耦合流体控制方程和六自由度运动方程对高速弹托分离过程进行了仿真分析,并与试验结果进行了对比,结果表明采用计算流体力学方法分析弹托分离过程精度较高。文献[7]在文献[4]的基础上,考虑弹托与弹体之间存在零间隙到逐渐分开的启动过程,建立了弹托分离初始张开、干扰分离和自由飞三个过程的仿真模型。同时研究了不同分离初速对弹托分离轨迹的影响,研究结果可对不同射击工况下脱壳穿甲弹的射击效能进行预测,并对试验现场的防护尤其对舰上设备的安置具有重要的参考意义。
然而不管是理论建模还是数值仿真方法均不能真实地反映弹托分离情况,而目前尚无公开发表的有关弹托分离测量的文献。文献[8]采用多台高速摄像组成的交会测量系统实现了对高速飞行弹体姿态的测量,验证了高速摄像测量高速运动物体姿态角方法的可行性;文献[9]采用双目视觉高速摄影测量原理实现了对物体姿态的测量,并与试验结果进行了对比,验证了双目视觉测姿的精度。鉴于目前弹托分离的研究现状和双目视觉测量的发展现状,本文基于双目视觉测姿原理,通过在弹体和弹托表面创造人工标记点,并采用目标检测和跟踪算法实现对标记点的自动识别和跟踪,最后解算出弹托分离角度。
1 测量原理
人类通过视觉获取空间物体的三维位置、姿态信息的过程为:首先通过双眼同时获取空间物体的二维成像;然后根据参照物的大小和远近信息,确定自身观察位置;最后经过大脑处理得到物体的三维位置和姿态信息。计算机双目立体视觉测量的基本原理与此类似,测量过程分为图像采集、空间标定和空间解算,其中图像采集通过两台相机从不同位置和角度同时拍摄空间物体;空间标定则通过在这两幅二维图像中找到参考物体成像,根据参考物体的大小标定得到两个相机的内外参数;空间解算则是利用相机的内外参数以及测量物体的成像位置信息计算得到该点物体在空间中相对参考坐标系的三维坐标。图1所示为三维双目视觉测量原理。
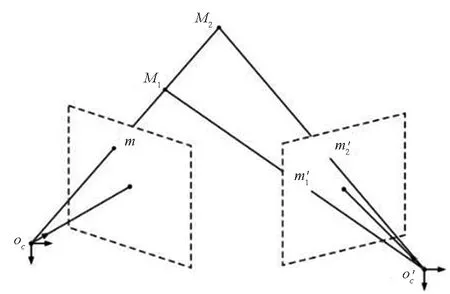
图1 三维双目视觉测量原理Fig.1 Principle of 3D binocular vision measurement
从上述双目视觉测量原理可知,图1中,由于oc、M1、M2和m四点共线,在视觉成像中为相同点,此时如果只有左相机,则无法通过m点的成像位置唯一确定M1或M2点。因此需要加入右相机,借助右相机中m′1或者m′2的成像位置信息,结合事先标定的相机参数即可唯一确定M1或M2点在三维空间中的位置信息。
因此,采用双目视觉计算弹体姿态包含三部分:一是相机的标定;二是特征点或标记点的识别和跟踪;三是弹体姿态的解算。下面对这三个部分进行介绍。
1.1 相机标定与校准
相机标定包括单相机标定和多相机标定,本文采用双相机标定方法。镜头在制作过程中存在偏差,导致成像过程中图像有畸变,进而影响标定精度,因此必须对镜头畸变进行校准,常用式(1)所示的数学模型表示[10]。
(1)
由上式可知,畸变模型为非线性模型,模型参数无法使用线性方法进行辨识。为此,可采用非线性最小二乘法对上式中的畸变模型参数进行优化辨识,优化的残差方程为:
式中,p代表相机畸变参数和相机内外参数在内的参数集,(xm,ym)表示成像中标志点的像素位置,N表示标志点个数,M表示标定图像数量。
采用非线性最小二乘法,并优化双相机成像模型参数,其中双相机参数优化的残差方程为:

(3)
式中,C=2,代表相机台数。优化过程为:首先利用左右相机的单相机参数初始化部分参数;然后根据两台相机的外部参数初始化Rh和Th,如式(4)所示,其中Rl、Tl、Rr、Tr分别表示相机的外部参数。
(4)
1.2 特征识别及检测
图像中的特征点包含了重要信息,是图像处理过程中重点关注的一类特征,就双目视觉测量来说,涉及特征点的识别及检测。具体过程为:首先采用图像匹配方法对包含特征点的成像进行处理,得到一系列像素点位置;然后利用这些特征点包含的空间位置信息,结合相机成像模型,即可确立相机之间的内参;最后推导出相机的外参、完成基准坐标系的建立,完成三维重建[11]。通常有两类特征点:第一类为自然特征点,存在于客观世界中,如物体的角点、轮廓等,这些特征点成像过程中存在不确定性,导致特征点的检测算法不稳定,易受外界干扰;另一类特征点为人工特征点,是指通过人为标记在物体表面的特殊标记点,如十字标记点、圆心标记点、圆形对角标记点等,这类特征点识别简单、检测算法稳定。本文选用圆形对角标识点,如图2所示。

图2 圆形对角标记点Fig.2 Diagonally circle marker points
对角标记黑橙相间的四个角形区域为识别带来了便利,因为这些对角区域所占扇形角度相同,因此即便在不同的角度拍摄成像,尽管四个对角的成像区域发生变形,但其对角区域扇形角相同,可大幅提高中心点的检测精度[11]。
检测过程为:先对图像进行二值化处理,并提取其边缘;采用Hough变换算法检测图像中交叉直线的相交点,并对这些待选点进行筛选,筛选的原则如下所示。
1)半径为r1的圆周上,灰度变化数为4。|l1-l3|<ε,|L1-L3|<ε。
2)半径为r2(r2>r1)的圆周上,灰度变化数为4。|l2-l4|<ε,|L2-L4|<ε。
3)|l2-l1|>δ,|l4-l3|>δ,|L2-L1|>δ,|L4-L3|>δ。
其中:L1和L3分别表示半径为r1的圆周上两对角的橙色像元个数,l1和l3分别表示半径为r1的圆周上两对角的黑色像元个数;L2和L4分别表示半径为r2的圆周上两对角的橙色像元个数,l2和l4分别表示半径为r2的圆周上两对角的黑色像元个数。
经过上述筛选流程后,利用模板匹配算法对剩余待选点的领域进行匹配,并设计相关函数,当相关函数取得最大值时,待选点即为对角标记点的精确定位位置。
1.3 弹体姿态计算方程
1.3.1 标记点坐标计算

(5)

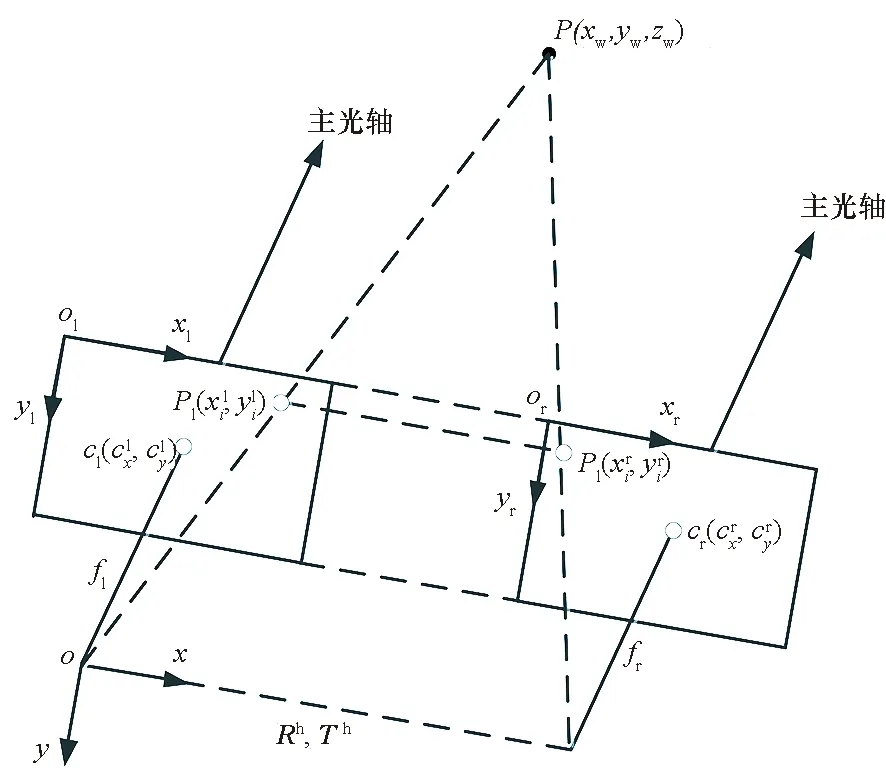
图3 双目视觉系统数学模型[12]Fig.3 Mathematical model of binocular vision system[12]
(6)
1.3.2 弹托分离角计算
在弹体表面做两个标记点,两个标记点的连线与弹体中轴平行,如图4所示的P1和P2点。采用图像跟踪算法实现对标记点的跟踪,再结合标定的高速摄像机内外参数可解算得到两点的空间坐标,记为(x1,y1,z1)和(x2,y2,z2),则弹体相对地面坐标系的俯仰角αp计算公式如式(7)所示分法。
(7)
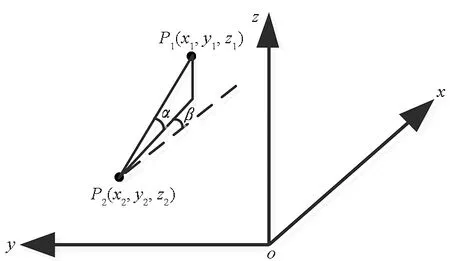
图4 弹体姿态计算空间坐标系Fig.4 Space coordinate system for projectile attitude calculation
采用同样的方法得到弹托相对地面坐标系的俯仰角αs,如图5所示,则弹托分离角可表示为:
α=αs-αp
(8)
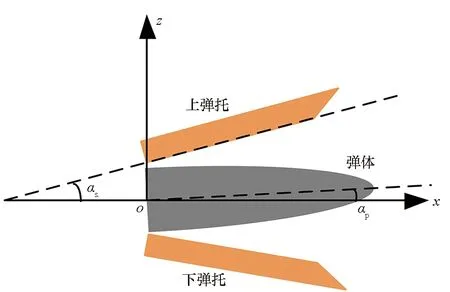
图5 弹托分离角计算示意Fig.5 Schematic diagram of calculation for sabot discard angle
2 实例验证
以实验室开展的脱壳弹射击试验为例,采用上述计算方法对脱壳弹出膛后的弹托分离角度进行测量。在靶道两侧上下布置两台相机,两相机光轴夹角约30°(一台仰视角15°、一台俯视角15°),拍摄视场区域约为2 m×2 m,画面重合率大于90%,确保弹体和托架表面拍摄清晰,如图6所示。
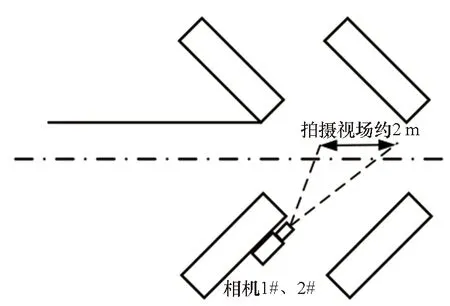
(a) 俯视图(a) Top view
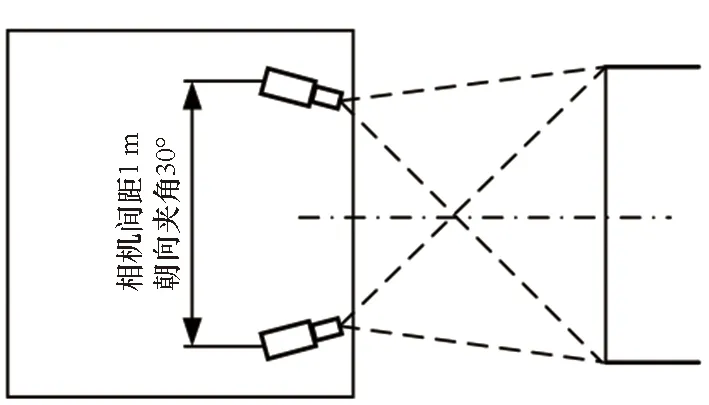
(b) 侧视图(b) Side view图6 高速摄像机布置Fig.6 Layout of high speed cameras
2.1 算法校准
为了验证上述方法的有效性和准确性,首先对该方法进行测试验证。采用两台高速摄像机拍摄标定板上标记点的运动,计算标记点之间连线的角度,图7(a)和图7 (b)为两台高速摄像机拍摄的标定板运动成像图。其中标记点P1和P2的连线与标记点P2和P3的连线理论夹角为90°,通过上述双目视觉原理测量得到的两直线夹角如图8所示,平均测量角度为89.8°,角度测量误差为2%,表明本文方法测量精度较高。
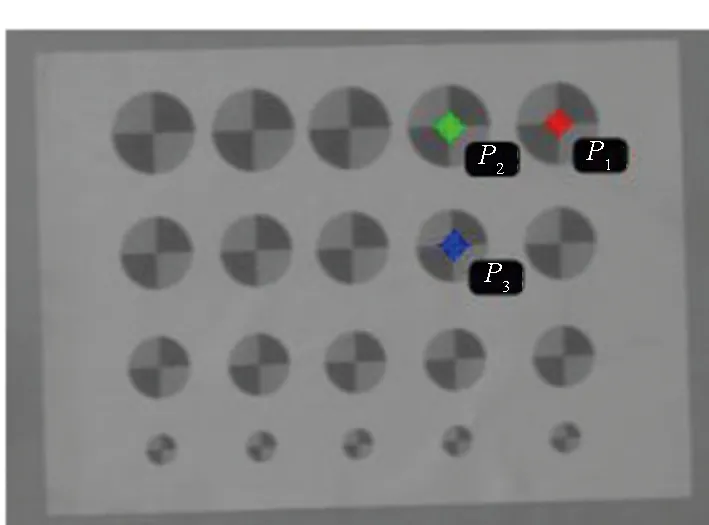
(a) 仰视拍摄图片(a) Picture shot from bottom view

图8 测量结果Fig.8 Measure result
2.2 弹体标记点识别结果
试验脱壳弹为两瓣弹托结构,在弹体和上下弹托表面分别绘制两个标记点,如图9(a)和图9(b)所示。通过跟踪测量得到各标记点相对其标定平面的平面坐标,再利用两个高速摄像机的交会点信息得到三维重建空间,如图9(c)所示。

(a) 标记点仰视图 (b) 标记点俯视图(a) Mark point bottom view (b) Mark point top view
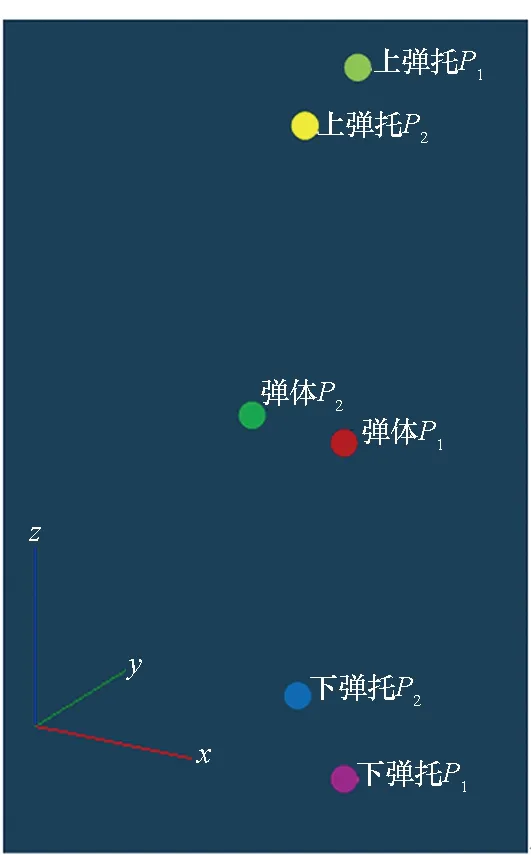
(c) 三维重建结果(c) 3D reconstruction result图9 标记点识别结果Fig.9 Recognition result of marker points
以1 550 m/s初速为例,得到弹体和上下弹托表面标记点的三维运动轨迹如图10所示。在水平方向(xy平面)弹体和上下弹托均往左偏(y+方向);在俯仰方向(xz平面)弹体往下偏(z-方向),上下弹托在俯仰方向运动曲线平稳,表明弹托径向运动速度基本不变。
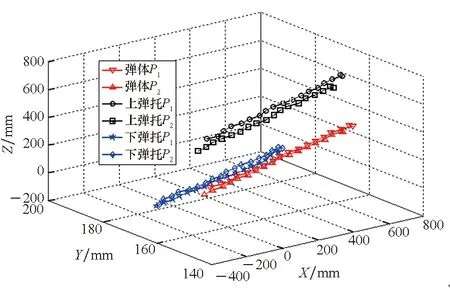
(a) 三维空间图(a) 3D space diagram
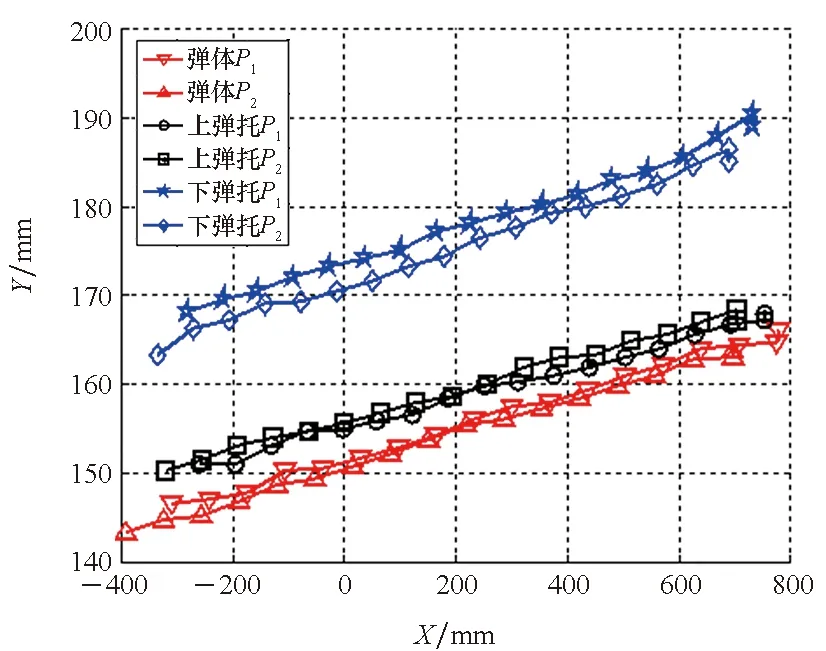
(b) xy平面视图(b) xy plane view
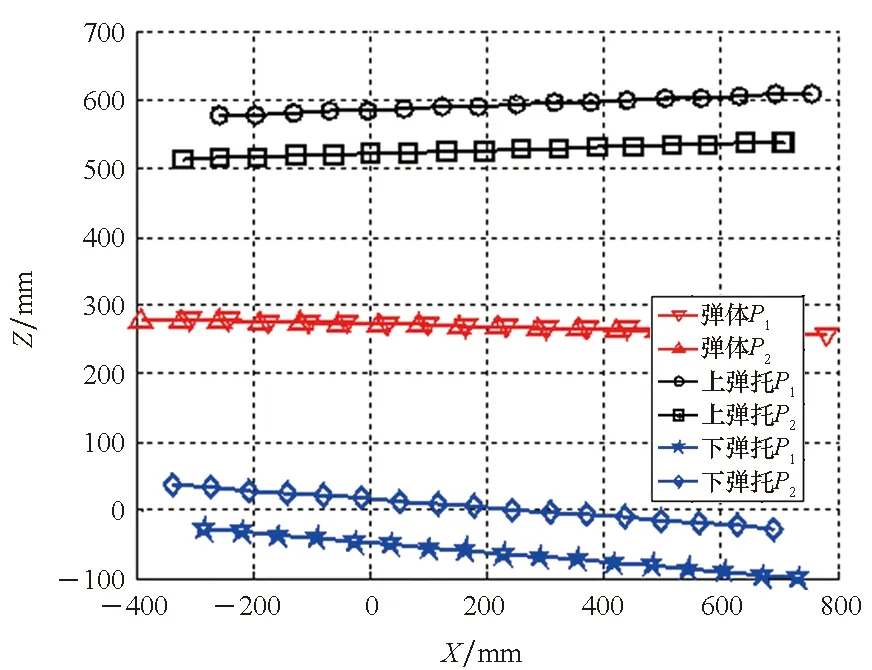
(c) xz平面视图(c) xz plane view图10 标记点运动轨迹Fig.10 Motion trail of marker points
2.3 弹托分离角测量结果
将弹体和上下弹托表面标记点的三维坐标代入式(8),得到如图11所示弹托分离角。在高速摄像机视野范围内,下弹托分离角大于上弹托分离角,最大分离角分别达到58.6°和56.1°。
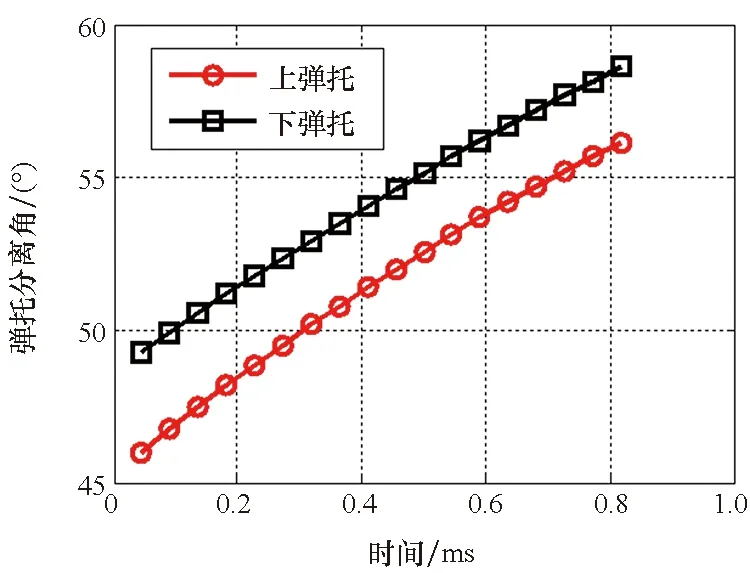
图11 弹托分离角度测算结果Fig.11 Analysis results of altitude of projectile and sabot
此外,随着弹托分离角的增大,弹托分离角速度减小,即图11中的曲线斜率减小,表明弹托受到的分离力矩逐渐减小,弹托逐渐进入自由飞状态。
2.4 不同初速弹托分离角测量
采用上述方法得到1 750 m/s初速下的弹托分离轨迹,如图12所示,其中横坐标表示弹丸相对视野范围内第一帧的位移。可见,上弹托分离角大于下弹托分离角,在高速摄像机视野范围内,最大分离角分别达到56.6°和53.0°。
图12 弹托分离轨迹对比Fig.12 Contrast of discard trail of the sabots
与初速为1 550 m/s的弹托分离轨迹相比,在距离炮口相同位置处,初速1 750 m/s对应的上下弹托平均弹托分离角度更小,这是由于弹托分离轨迹主要取决于弹托受到的阻力和升力,分离初速增大,弹托阻力系数和升力系数均减小,但分离初速的增加对阻力系数的减小比例更大,从而导致分离初速增加时,在相同位置观察到的弹托更靠近弹体[7]。
3 结论
弹托分离过程对弹体的飞行稳定性和打击效能具有显著的影响作用。本文在搭建了基于双目视觉原理物体姿态测量平台的基础上,实现了对弹体和弹托表面标记点的跟踪和测量,从而得到了弹托分离角的计算公式,并利用标定板验证了本文方法的准确性,测量误差在2%左右。最后以实验室进行的动态发射实验为例,测量并分析了弹托分离角变化,同时对不同发射初速对弹托分离的影响进行了分析,分析结果表明,分离初速越快,弹托分离轨迹越靠近弹体。本文的研究方法和结论可为弹托分离设计和分离过程中的设备防护提供依据。
猜你喜欢
兵器装备工程学报(2022年7期)2022-08-10 03:37:18
爆炸与冲击(2022年2期)2022-03-17 07:28:44
电子制作(2019年20期)2019-12-04 03:51:38
数学年刊A辑(中文版)(2018年4期)2019-01-08 02:00:24
上海煤气(2018年6期)2018-03-07 01:03:22
现代计算机(2016年11期)2016-02-28 18:35:20
现代防御技术(2014年5期)2014-02-28 18:26:16
机械与电子(2014年2期)2014-02-28 02:07:46
文山学院学报(2012年6期)2012-03-25 13:07:52
空间控制技术与应用(2010年3期)2010-12-23 08:04:58
