
基于V2V通信的车队纵向协同控制
2023-03-02 01:58殷康超祁子豪
汽车实用技术 2023年4期
殷康超,祁子豪
(长安大学 汽车学院,陕西 西安 710064)
现如今,随着交通环境的日益复杂,导致交通事故频发,交通拥堵加剧,为此,如何改善交通问题,提高交通效率,已经成为社会的热点问题[1]。客观来说,实现理想情况下的完全无人驾驶是解决交通问题最有效的途径,但是由于法律法规的限制以及关键技术的壁垒,使得完全的无人驾驶在很长时间内无法投入实际应用,为了缓解当前的交通问题,目前后车自动跟随前车形成车辆队列的行驶模式得到广泛关注[2]。在传统的自适应巡航(Adaptive Cruise Control, ACC)系统中,由于仅仅使用单车传感器进行感知,因此,在雨雾天等特殊工况下,传感器感知能力不佳,车辆的跟车性能较差,为了改善传统ACC的不足,本文提出了将车联网车车(Vehicle to Vehicle, V2V)通信技术应用于车队纵向协同控制系统中,使得车辆队列在行驶的过程中,不仅能够依靠传感器感知距离信息,还能够依据V2V通信进行数据交互,实时获得前方车辆当前的状态信息,且依靠通信技术可以在传感器感知能力不佳的情况下稳定的获取信息,从而提升车辆在多场景下的跟车性能,保证跟车安全性和稳定性。
1 车车通信系统
1.1 车辆信息交互系统
当车队中包含多个车辆时,车车之间的通信就会构成通信网络,根据信息的不同传递方式,可形成不同的信息拓扑结构。图1为所设计的车车信息交互的结构,当车辆队列在行驶过程中,一方面可以通过在车辆上搭载车联网(Vehicle to Everything, V2X)车载单元(On Board Unit, OBU)进行车车之间的信息交互,使得后车能够实时地接收前车发送的速度、加速度和位置信息;另一方面可以通过在后车上搭载的激光雷达获取车车之间的距离信息,后车根据接受到的信息通过设计合理的间距跟驰算法对其跟随速度进行规划,并通过相应的执行机构对车辆实施控制,从而保证车队跟车的安全性和鲁棒性。
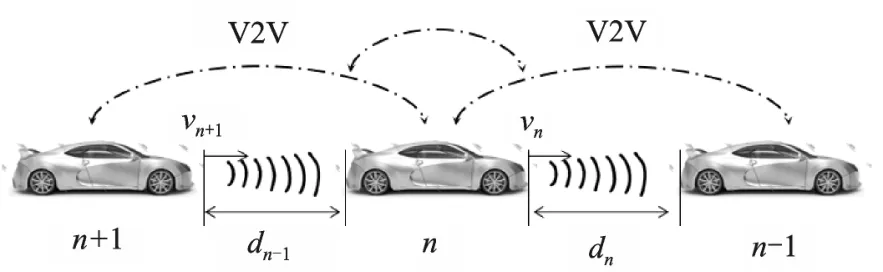
图1 车车信息交互结构图
1.2 车辆通信方式的选择
本文所设计的车辆通讯系统中,后车与前车之间是通过所搭载的车载OBU进行通信,但是进行通信的设备必须拥有统一的通信标准才能实现通信,因此,需要首先确立其通信规范。近年来,V2V通信在车辆网领域的通信技术路线有两种,一种是专门为车辆通信开发的专用短程通信(Dedicated Short Range Communications, DSRC)技术[3],另一种是基于蜂窝网络开发的,以电信为基础的蜂窝移动网络的车联网通信(Cellular Vehicle-to-Everything, C-V2X)技术[4]。其中DSRC通信技术发展较早,其特点是对短程中高速行驶的车辆之间进行通信连接,它的技术相对来说比较成熟、稳定,但是缺点是通信时延较长,而且通信距离有限。而C-V2X技术是基于3G/4G/5G等蜂窝网通信技术演进形成的车用无线通信技术,可实现长距离和更大范围的可靠通信,因此,为了车辆跟车的实时性和鲁棒性,本文选择C-V2X通信技术。相比于使用4G通信技术,虽然使用5G技术的V2X通信延时性更短、更高效,但是考虑到当前5G基站建造成本过高且普及性较差,且使用4G的通信技术满足当前的汽车网络时效性要求,因此,本文选择基于4G蜂窝网络的LET-V2X通信技术。
2 车辆纵向协同控制系统
2.1 车辆纵向间距控制策略
为了保证车辆在行驶过程中跟车的安全性,同时尽可能的减小跟驰距离,需要建立合适的安全距离模型。当前研究的安全距离模型根据的是安全距离还是安全时间可分为固定间距模型、固定时距模型和可变时距模型[5]。其中固定间距模型不能很好地考虑前车速度变化所带来的安全性问题,可变车头时距的控制精度虽然较高,但是结构复杂,因此,本文的间距控制采用固定车头时距模型,把后车的反应时间作为固定的车头时距,并在车辆跟随的过程中,将相对速度信息和间距误差作为对后车控制的输入量,通过间距控制算法得到后车的期望加速度,调节后车速度,使后车行驶在期望的车间距之内,从而保证跟车的稳定性。
车队在行驶过程中前车速度为vn-1,当前车以加速度a制动时,其停止之前所行驶的距离为
假设后车的反应时间为t,经过时间t后,后车同样以加速度a制动,后车行驶过的距离为
两车在行驶的过程中,要求两车之间的距离始终要大于安全距离dsafety[6]。因此,车辆在跟车行驶过程中的期望间距dexp需要满足
在车队正常行驶过程中,前后两车的速度可以看作近似相等,因此,上式可以简化为
因此,在此处就可以把后车的反应时间t看作是固定的车头时距,根据该模型,车辆在跟随行驶的过程中,其期望的间距主要考虑后车的速度,并不考虑两车的相对速度的影响,但实际上,相对速度对跟车安全性也有很大影响。因此,在本文的跟随控制中,通过不断对后车跟驰速度进行反馈调节,从而使前后速度趋于一致,进而保证车辆间距的稳定[7]。其间距控制算法结构如图2所示。
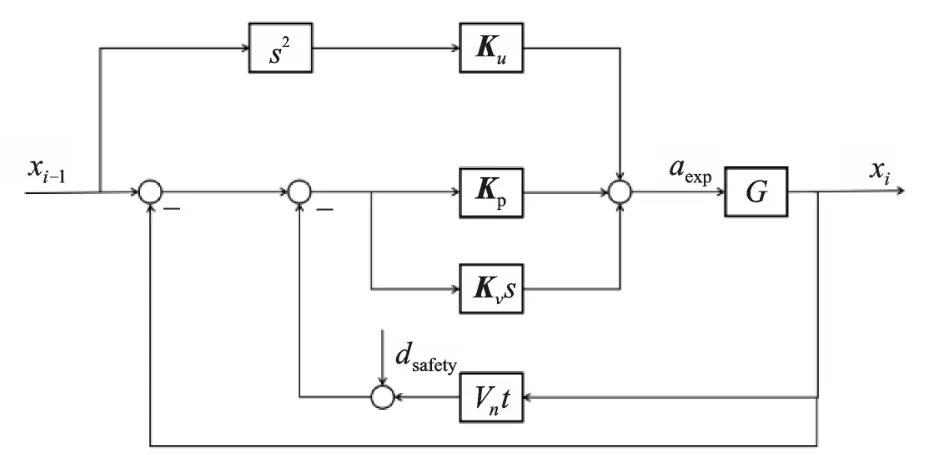
图2 间距控制算法
图2 中,G为车辆动力学模型的传递函数;Kp和Kv是比例误差调节系数;Ku为滤波系数;aexp为后车的期望加速度。该算法以前车的加速度作为前馈控制,实际间距和期望间距的误差作为反馈控制,后车输入的期望加速度为[8]
式中,ei为间距误差;an-1为前车的加速度。
2.2 车辆纵向控制结构
为了更加清楚地表现车辆纵向控制的结构,本文将车辆纵向控制逻辑分为上下两层,其具体的结构如图3所示。上层控制器是根据所制定的间距控制策略和输入的车辆状态信息计算出后车的期望加速度并输出;下层控制器则是根据所输入的期望加速度,利用车载工控机,其通过控制器局域网络(Controller Area Network, CAN)总线与车辆的线控底盘相连,从而通过CAN总线对车辆的线控制动和线控驱动进行控制,最终在跟驰过程中实时调节后车的行驶速度,保证跟驰的安全与稳定。
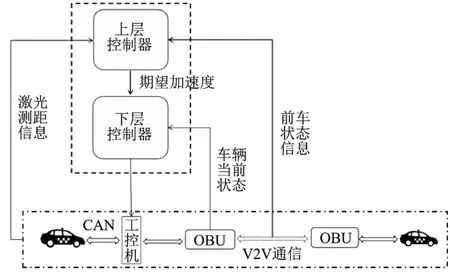
图3 车辆纵向控制结构图
3 车队纵向协同控制系统的仿真
本文利用Prescan和Simulink联合仿真对所设计的车辆跟随算法进行验证,首先在Prescan软件中搭建实验场景,图4为两辆车组成的队列在道路上协同行驶的场景。仿真场景搭建完成后,利用Matlab对Prescan进行扩展,其主要作用是对控制器进行设计和算法进行求解,并将求解后的 控制命令通过接口传递到Prescan进行模型的求解,通过在Prescan中的车辆上搭载激光雷达和V2X传感器获得的有用数据输出返回到Matlab中,作为规划算法的输入。

图4 Prescan仿真环境中两辆车的协同行驶
根据所设计的车辆纵向控制算法,在Simulink中搭建如图5所示的车辆纵向控制模型。其中Lead Car为前车控制模块,Ego Car为后车控制模块,通过向Lead Car输入加速度控制信号a_lead对Prescan中的前车的速度进行控制,仿真前设置前后车的初始位置x0_lead和x0_ego,前后车的初始速度v0_lead和v0_ego,Lead Car和Ego Car的输出结果为各自的实时位置和速度信息,并分别计算其相对值。Adaptive Cruise Control System为核心控制模块,其输入信号为根据间距控制策略所制定的间距误差d_rel和相对速度信息v_rel,除此之外,根据固定车头时距模型,设定t_gap为后车跟驰反应速度,将其作为固定的车头时距,在这里根据经验设置为1.4 s,除此之外,为了使车辆的速度不至于过高,增加了一个速度输入v_set,通过该控制模块进行计算后,向后车输出期望加速度信息a_ego,对后车的速度进行控制,使间距保持在合理的范围内。
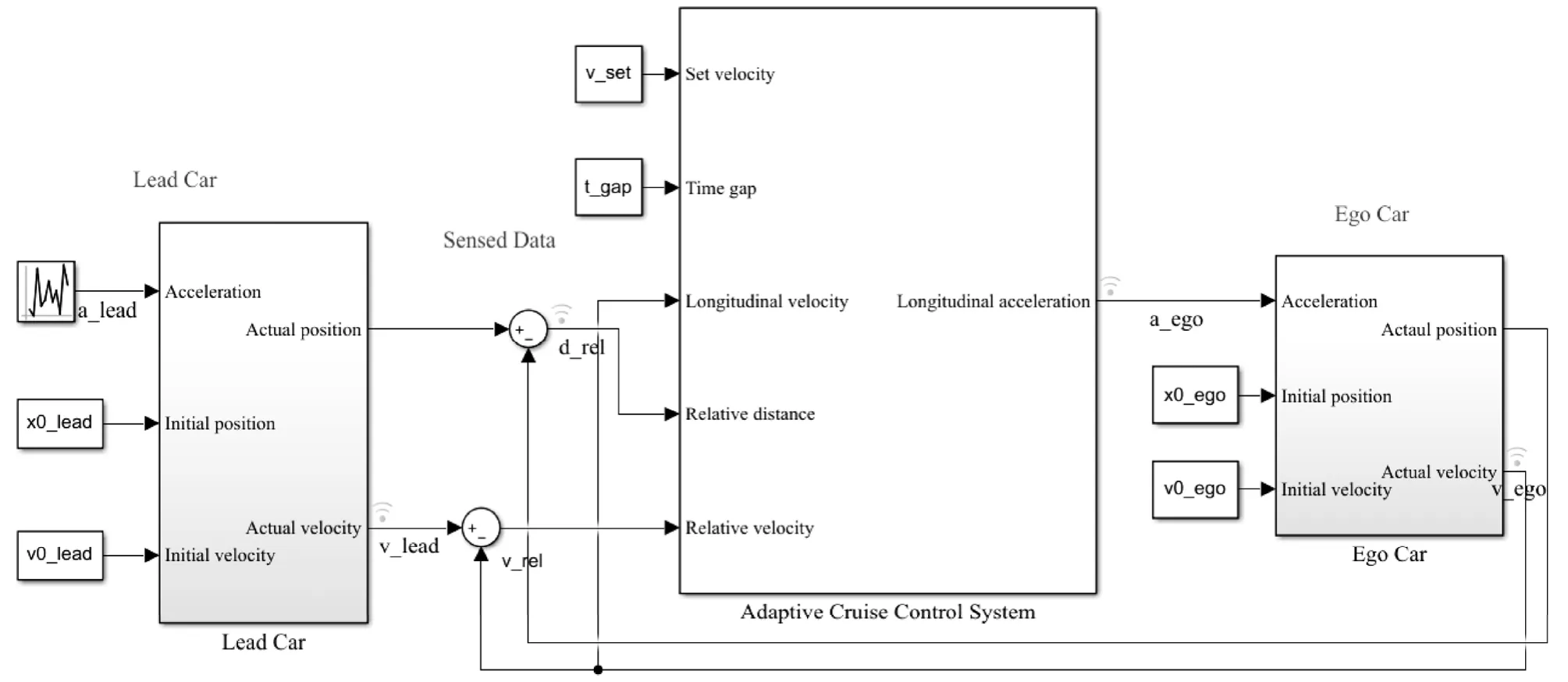
图5 Simulink车辆控制模型
为了模拟车辆纵向协同运动,在Prescan中先设定一条纵向运行轨迹,前车按照Simulink模型中预设的加速度、初速度和初始位置信号进行运动,然后给后车输入一定的初始速度,设定与前车保持一定的初始距离作为初始状态进行仿真,图6为车辆跟随过程中的加速度变化过程,图中实线即为对前车加速度的控制,虚线为后车跟车过程中加速度的变化曲线。图7为前后车的速度变化过程,给前车初始速度25 m/s,后车初始速度20 m/s,因此,在刚开始为了跟车稳定,后车的加速度较大,在10 s以后车的速度基本与前车保持一致,达到预期效果。
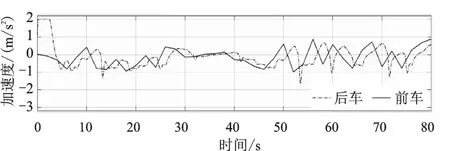
图6 加速度变化曲线

图7 速度变化曲线
图8 为车辆跟随过程中的距离变化,虚线为车队在行驶过程中前后车之间的安全距离,实线为实际的跟车距离,由图可知在车辆跟随的过程中,后车的跟驰距离始终大于其安全距离,从而验证了车辆纵向协同控制策略的准确性。
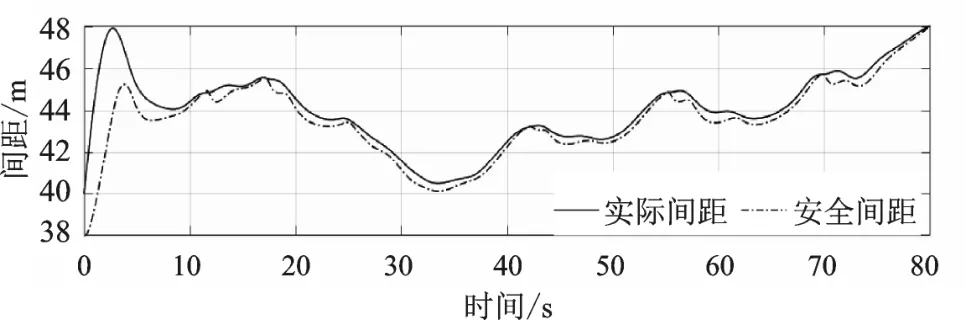
图8 距离变化曲线
4 结论
本文将V2V通信技术应用到车队纵向协同控制系统中,在雷达感知获取信息的基础上,通过车车通信实时获取车辆状态,实现不单纯依赖传感器感知能力获取信息,改善了实现恶劣工况下的跟车性能,提高了车辆跟车的安全性,为车路协同辅助驾驶提供了一定的理论基础。
猜你喜欢
人类工效学(2021年5期)2022-01-15
控制与信息技术(2021年2期)2021-07-23
绥化学院学报(2019年10期)2019-10-12
新传奇(2018年16期)2018-05-14
心理科学进展(2018年8期)2018-02-21
人民交通(2016年5期)2017-01-05
电信科学(2016年11期)2016-11-23
爆笑show(2016年3期)2016-06-17
儿童绘本(2016年6期)2016-05-14
心理科学进展(2015年5期)2015-02-26
