汽车电动侧门系统悬停工况驱动力研究
2023-03-01 04:45孙晓攀宋明亮
汽车工程师 2023年2期
孙晓攀 宋明亮
(泛亚汽车技术中心有限公司,上海 201201)
1 前言
汽车电动侧门因其智能化、科技感、便利性等特点受到年轻消费群体的青睐。与传统车门系统采用机械限位器使车门在打开状态下保持在一定位置不同,电动侧门系统利用电动执行器在开、关门过程中实现车门的电动开启、关闭和保持,电动执行器与车门上其他电动零件如电动释放门锁、吸合锁、雷达传感器等共同组成电动侧门系统。
电动门开闭系统在整车上的应用很多,如电动尾门开闭系统[1]和电动滑移门开闭系统[2],但电动尾门和滑移门开闭系统的力学及控制系统分析仅需考虑车辆纵向坡度对系统控制产生的影响。同时,相较于电动侧门,电动尾门的用户使用频次较低,对手动操作力不需过多关注。电动侧门系统开发既需要考虑车辆纵、横向坡度对系统控制的影响,又需考虑车门在任意开启角度下保持悬停,同时保证车门在悬停状态下用户手动操作时,车门开闭感良好[3]。因此,分析电动侧门系统动力学原理并设计相应的力学分析模型,对电动门控制模块的算法开发十分重要。
本文以某一车型电动侧门系统为研究对象,综合考虑汽车纵向、横向坡度及车门开启角度的影响,建立电动侧门悬停工况下的手动开、关门力模型。根据手动操作力仿真结果确定执行器驱动力模型,制定电动门控制系统算法开发策略,最后通过台架测试验证模型的准确性。
2 电动侧门悬停工况分析
2.1 电动侧门系统
电动侧门系统涉及的零件包括电动门执行器、电释放门锁、吸合锁、电子控制单元(Electronic Control Unit,ECU)和避障雷达,如图1 所示。车门全关状态下,ECU 收到用户的开门指令,控制电释放门锁执行释放动作,门锁释放完成后,ECU 控制电动执行器工作撑开车门,实现电动开门功能。开门过程中如遇障碍物或者收到用户的停止指令,ECU 控制执行器使车门悬停。目前量产车型中配备电动侧门的车型较少,且电动门故障发生后,依然需要用户手动开关门。因此,在电动门控制系统开发的同时,也需要考虑手动操作时的车门开闭感。这就需要电动门满足手动操作模式下的系统要求,如手动操作力小于系统要求,车门在任意坡度、任意开启角度下都能保持悬停。
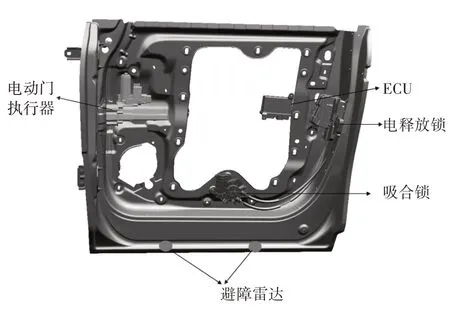
图1 电动门系统组成
门执行器是实现电动开关门和悬停功能的核心部件,电动门靠电动执行器或离合器使车门悬停。目前主流的侧门悬停方式分为2种类型,如表1所示。机械阻尼式悬停系统通过增大执行器机械内阻提高门系统的摩擦力使车门保持悬停,完全利用系统的机械性能实现悬停功能,但增大执行器内阻会增大用户的手动操作力,导致用户在手动开、关门时操作力大甚至无法推动或拉动车门,车门开闭感较差。电子阻尼式悬停系统使用电磁阻尼器实现悬停或直接控制执行器输出悬停驱动力实现,需要对电动门进行系统性力学分析,得到悬停状态的力学模型,并进行电动助力悬停算法的开发,从而实现电动门电动助力悬停功能。本文主要针对电子阻尼式方案进行门系统力学分析及算法模型开发。
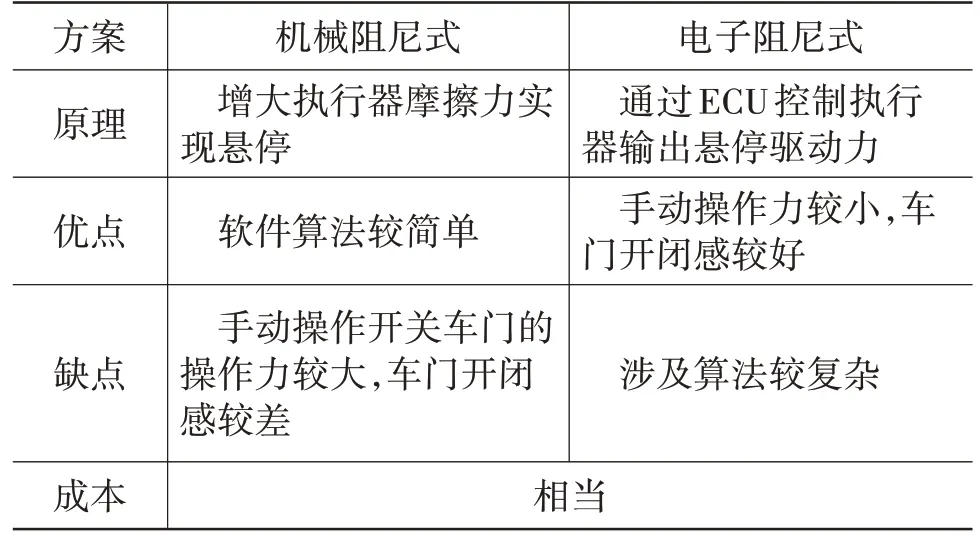
表1 电动门悬停方案对比
2.2 悬停工况分析
如图2所示为悬停工况下电动门受力情况。在不同的开门角度和纵、横向坡度条件下,重力沿门开关方向的分力区别较大,需要执行器电机提供驻坡的动力差异较大,因此需要对悬停工况进行分析,考虑纵、横向坡度及开门角度对执行器提供驻坡驱动力的影响[4]。
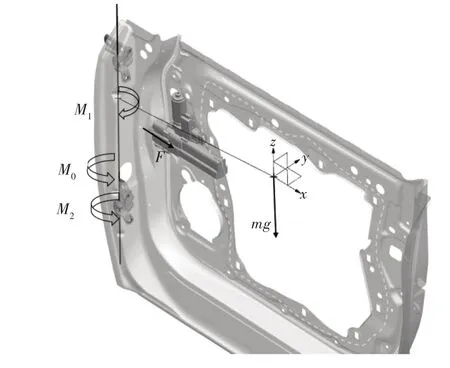
图2 悬停工况下电动侧门受力情况
驻坡悬停过程中,电动侧门系统的驱动力与阻力的关系为:
式中,M0为重力力矩;M1为执行器驱动力矩;M2为系统摩擦力矩。
电动门在悬停过程中,M2包括执行器机械内阻、铰链摩擦力等形成的力矩。
设计状态下,取M1=M0,执行器输出力矩与重力矩大小相等,方向相反。
3 重力矩模型
3.1 模型推导
本文以左侧门为例建立分析模型,右侧门模型与左侧门模型主要的区别是车门质量和横向坡度不同。
首先建立坐标系。如图3所示,O3是铰链轴线上一点,G为车门在全关状态下的重心,将绝对坐标系的原点平移至G点,得到绝对坐标系G-xyz,再将Gxyz旋转,使z轴与铰链轴线平行,得到相对坐标系Gx1y1z1,此时作出相对坐标系平面x1y1与铰链轴线的交点O,O3O⊥GO。当整车的纵、横向坡度发生变化时,可认为整车绕绝对坐标系G-xyz的y轴和x轴旋转,此时O点和O3点的绝对坐标也会随之变化。
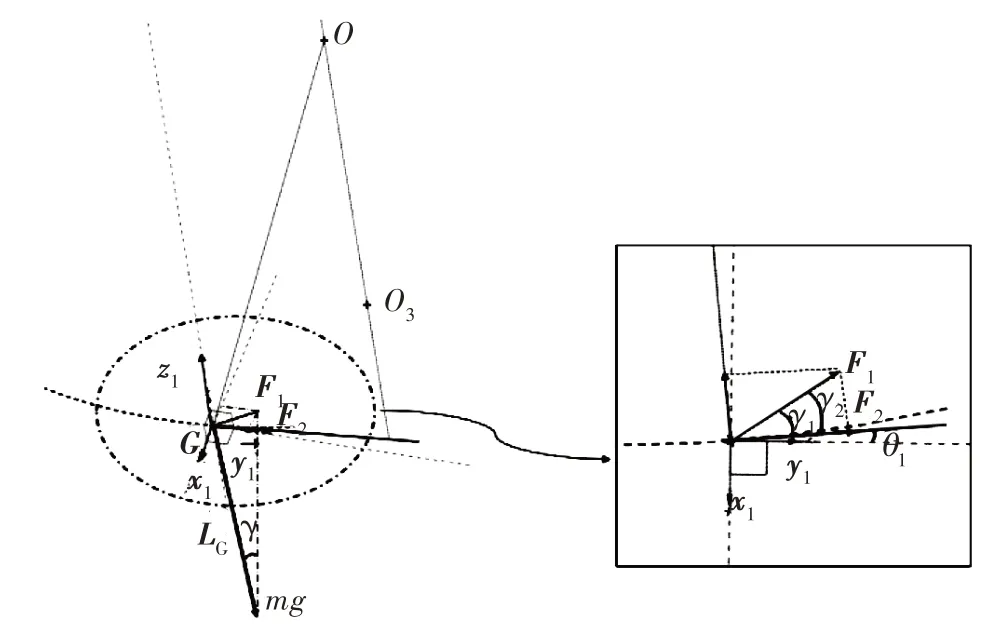
图3 悬停工况下重力分解示意
假设下坡(铰链轴线前倾)方向为正、右倾(铰链轴线内倾)方向为正,车辆水平状态下铰链轴线与绝对坐标系z轴的夹角为γ、内倾角为α1、前倾角为β1
[5],相对于绝对坐标系G-xyz,铰链轴线的方向向量为:
因此,相对于相对坐标系G-x1y1z1,重力方向的方向向量为:
设重力在x1y1平面的分力为F1,F2为F1沿OG垂直方向的分力,见图3。设γ1为F1与y1正方向的夹角,γ2为F1与F2的夹角,θ1为F2与y1正方向的夹角,也等价于OG与x1的夹角,LF1为F1的方向向量,y1为相对坐标系G-x1y1z1中y1轴的方向向量。当车辆前倾角为∆β、内倾角为∆α时,重力的方向向量LG为:
F1的方向向量LF1为:
将重力分解后,重力矩的表达式为:
式中,RG为重心G绕铰链轴线的旋转半径,即重力矩的力臂;m为电动侧门系统的质量;g为重力加速度;θ2为开门角度。
由于OG⊥OO3,则O点在平面x1y1上,所以O点在相对坐标系上的纵坐标为0,设O点的相对坐标为(x′,y′,0),O3在相对坐标系下的坐标为(x′,y′,z′),O3的相对坐标可由绝对坐标系坐标经过坐标系旋转得到。
设水平路面状态下,O3的绝对坐标为(x1,y1,z1),O3点坐标为常量,与布置状态相关,当车辆在某一坡度下(前倾角为∆β、内倾角为∆α)时,O3点坐标值可通过空间坐标系中坐标的旋转得到[6],可看作O3绕x轴旋转∆α,再绕y轴旋转∆β得到:
式中,p=x1sin(-∆β);q=z1cos(-∆β)。
参考坐标系G-x1y1z1相对于绝对绝对坐标系G-xyz的转换过程可以分解为:
G-xyz绕x轴旋转∆α,再绕y轴旋转∆β得到G-x1y1z1,O3点在参考坐标系G-xyz中的坐标为(x2,y2,z2),在G-x1y1z1坐标系中的坐标为(x′,y′,z′),根据以上角度可得旋转矩阵为[7-8]:
其中∆β∈[-10°,10°]、∆α∈[-5°,5°]、θ2∈[0°,65°],联立式(7)~式(13)即可得到M0和M1。
由于电动侧门执行器自身总存在一定的内阻,需要利用推导出的M0确定在某一坡度下,系统内阻是否足以使车门悬停。应只针对需要电动助力悬停的坡度施加驱动力,因此需要推导手动模式下电动门的手动开门力和关门力曲线,如果手动开门力小于0,则代表该坡度和开门角度下,系统无法通过自身内阻使车门悬停,关门过程与开门过程相同,不再重复描述。
设重力的分力指向车内方向为正,则手动开门力矩和手动关门力矩分别为:
式中,Fopen、Fclose分别为手动开门力、手动关门力;L4为测力点到铰链轴线的距离,即手动开、关门力臂;M2max为系统动摩擦力。
M2max为固定值,可通过实际测量得到,测量方法为:将测试台架调整到使铰链轴线与大地垂直,以使系统重力的方向与铰链轴线平行,以确保重力绕铰链轴线的力矩为0,在车门上取与用户正常开门位置接近的测力点,用测力计在测力点处缓慢推动车门,得到的稳定力值即为系统摩擦力Ff,则有:
3.2 模型结果分析
电动侧门系统布置相关的系统参数如表2所示。
将表2 中参数代入分析模型,得到不同坡度工况下的手动关门、手动开门操作力曲线分别如图4、图5 所示,其中∆β分别取-10°、0°、10° 3 个典型工况,∆α在[-5°,5°]范围内取值,开门角度为0°~65°。手动关门力或手动开门力小于0,代表当前的系统阻力无法使车门保持悬停,需要电动助力悬停;若手动开门力和手动关门力均大于0,表示在当前的纵、横向坡度条件下,仅依靠系统摩擦力可以使车门悬停在某一开度。由图4、图5可以得到以下结论:

图4 不同坡度工况下手动关门操作力曲线
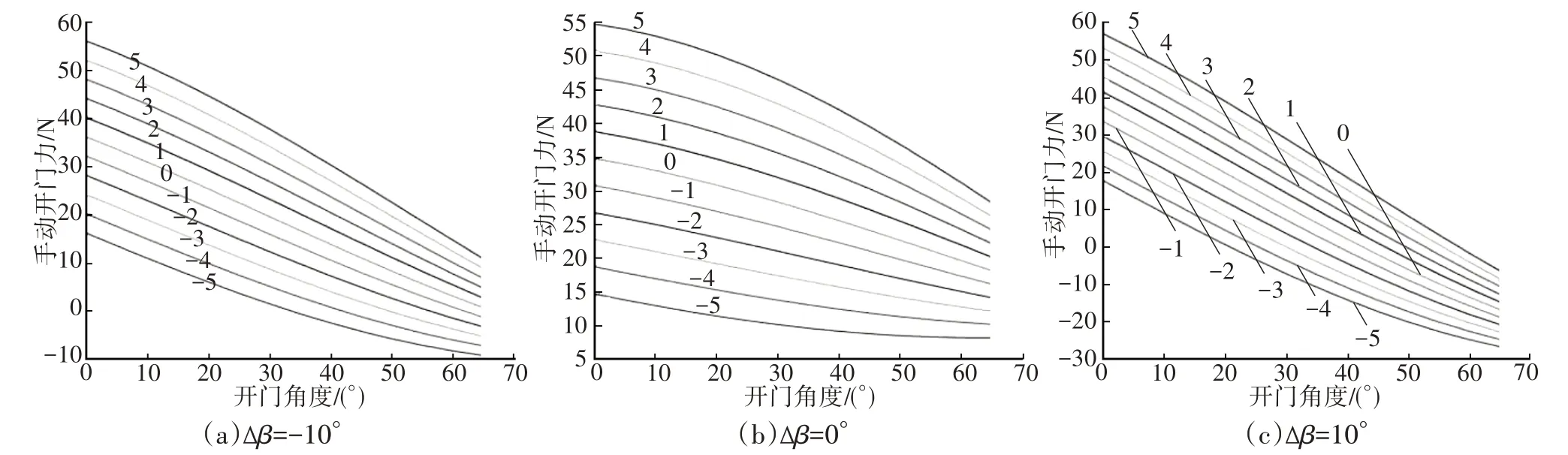
图5 不同坡度工况下手动开门操作力曲线
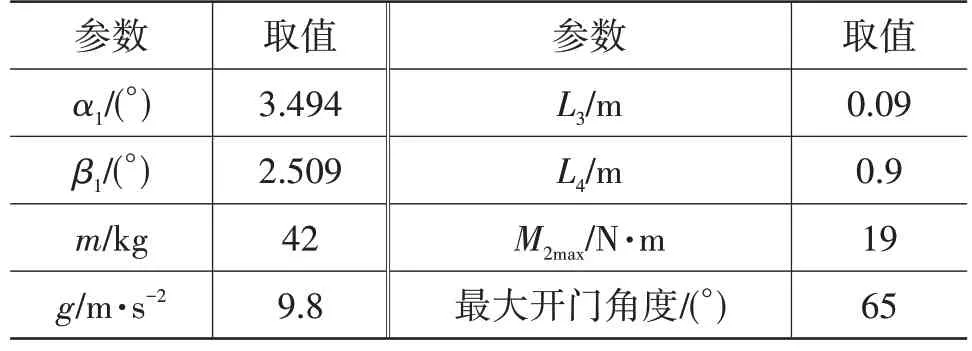
表2 电动门系统布置参数
a.水平路面状态下(∆β=0°,∆α=0°),该系统可以依靠系统摩擦力使车门悬停在任意开启角度;开门操作力最大值约为35 N,关门操作力最大值约为22 N,关门的操作感觉更优。
b.最恶劣的手动关门工况条件为∆β=10°、∆α=-5°,此时手动关门操作力约为67 N。
c.最恶劣的手动开门工况条件为∆α=5°,此时手动开门力约为58 N。
根据开门操作力和关门操作力曲线可以判断出某具体工况是否需要执行器电动助力悬停,再根据悬停工况下执行器输出力与开门角度的关系得到某一坡度、某一开门角度工况下,系统所需的悬停工况的电动助力目标值。不同坡度的悬停工况下执行器输出力与开门角度的关系如图6 所示,其中输出力为负值代表力的方向指向车内,反之指向车外。由图6 可以看出,纵向坡度变化对悬停助力的影响较横向坡度变化小。
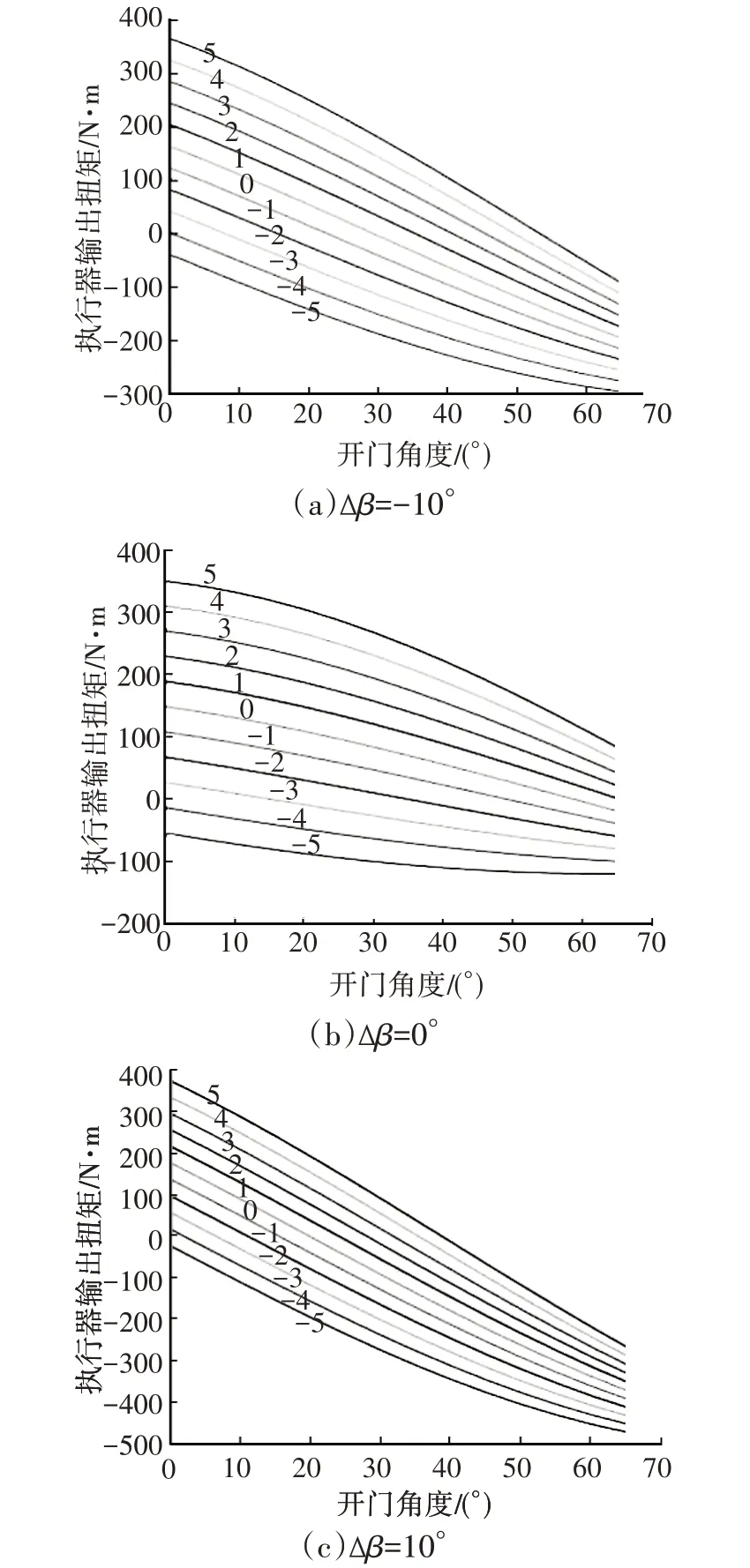
图6 不同坡度的悬停工况下执行器输出力
与开门角度的关系
3.3 电动侧门执行器悬停算法策略
电机输出力作用点在车门上,力的方向沿滑块轨迹线方向,同样可以简化力臂在开、关门过程中的变化,驱动力力臂L3为常量,与执行器实际的布置状态相关,则执行器输出力为:
设从执行器电机输出轴到丝杠的减速比为m1,执行器机构输出效率为η1,丝杠的导程为p1,执行器电机输出扭矩为M5,故有:
根据电机的特性曲线可知,执行器电机输出扭矩M5与电流I成正比,比例系数为Km,则
联立式(19)~式(21)可得到M1与I间的关系为:
故可得I与M1的总比例系数为:
本文的目的是将电动侧门系统的悬停工况的力学分析结果转化为电动门执行器对门系统的输出驱动电压,该驱动电压随车辆纵、横向坡度及开、关门角度的变化而变化。因此本文并不需要针对执行器或执行器电机本身开展电机动态分析,而是在进行算法开发时,通过电动门台架直接标定出总比例系数Kx。以电流I为目标值,通过PID算法控制执行器驱动,使驱动电流达到目标值I,从而实现车门系统在任意坡度、任意开门角度下保持悬停。标定过程是先将台架调整至较大横、纵向坡度,逐渐调整Kx至电动门能在任意开启角度保持悬停,测量手动开门力和手动关门力,再微调Kx至手动开、关门力与系统摩擦力Ff大小相等,此时即可认为Kx标定成功。该控制和标定方法简单,同时可以为用户提供较好的车门开闭感。
4 台架测试验证
本文利用电动门台架验证手动开、关门操作力及电动悬停助力标定后的结果是否符合预期,如图7所示。

图7 电动门测试台架
对于悬停助力工况,通过标定Kx得到较为理想的悬停力,该力矩仅平衡重力的分力矩。用户在手动推车门时仅需要克服系统摩擦力,提升车门开闭感,对于手动操作力,使用测力计测量水平路面条件下的开、关门手动力,与算法模型预测结果相比较进行验证,如图8所示,测力计测量结果具备一定误差,但整体的测量结果与预测结果趋势吻合,由此可以说明以上算法模型的准确性。
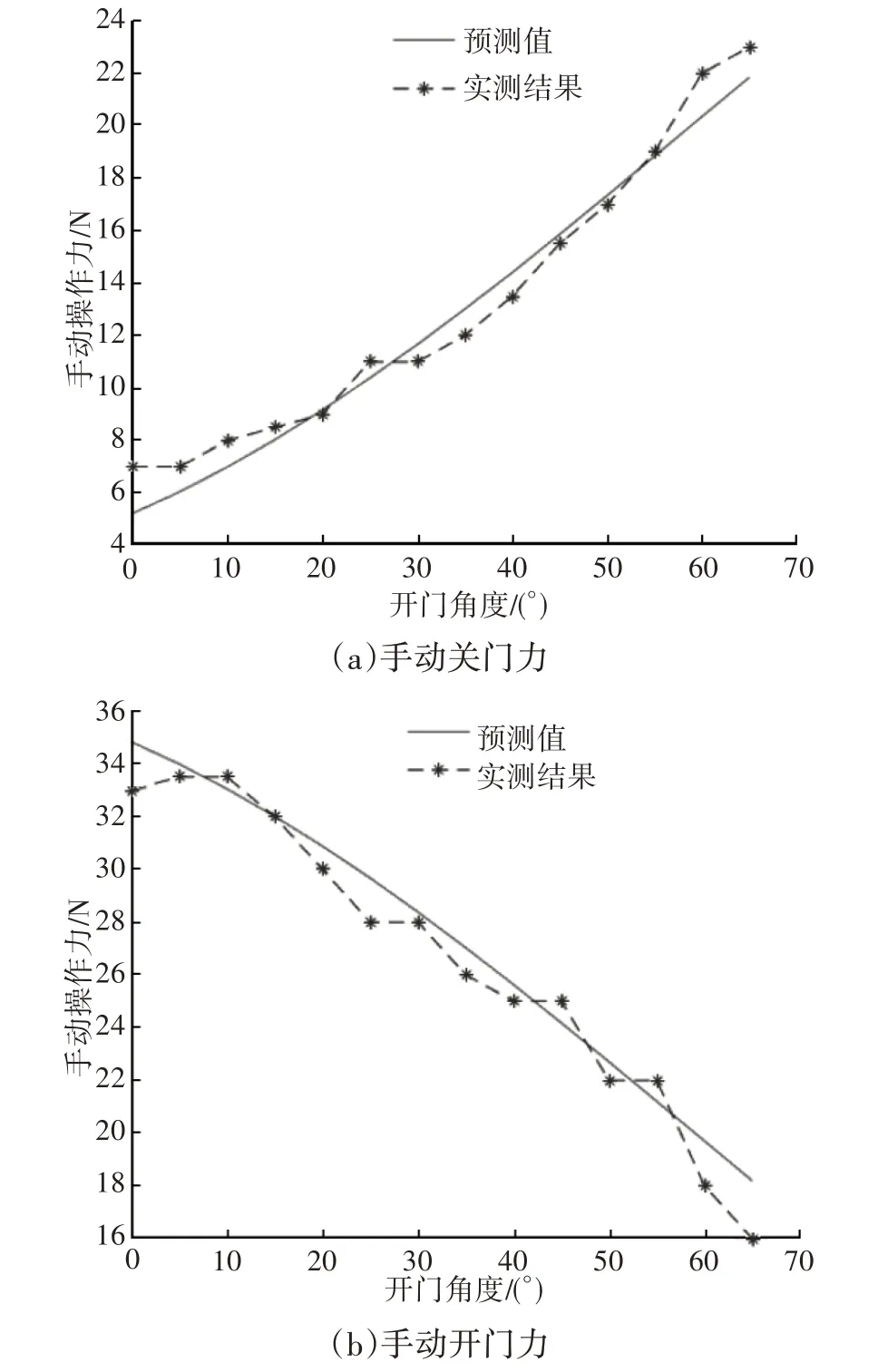
图8 手动开关门力预测值与实测结果对比
5 结束语
本文针对乘用车电动侧门系统,根据电动门手动模式及悬停状态的用户使用场景,同时考虑不同纵、横向坡度工况对电动门系统的影响,进行力学分析及算法模型推导,得到电动门手动模式的开、关门力模型,根据手动开、关门力的范围确定电动悬停助力模型,并利用电动门台架验证了手动开关门操作力及电动悬停助力标定结果,得到以下结论:
a.水平路面状态下电动门系统各零件内阻及系统摩擦力足以使车门悬停在任意开门角度,且用户手动开关门力小于35 N,可以满足用户日常使用要求。
b.在纵、横向坡度较大,尤其是纵、横向坡度耦合的场景下,电动门无法在任意开门角度悬停,且该工况下手动开关门力较大,需要电动助力才能使车门在任意开门角度下保持悬停。
c.电动助力算法开发中,仅需要对Kx进行标定,标定方法简单,并且可使悬停助力值不至于过大或过小,从而提升车门开闭感。
d.模型计算结果与台架实测结果一致性较好,从而验证了模型的准确性。
猜你喜欢
科技与创新(2022年17期)2022-08-30
铁道车辆(2021年5期)2021-11-09
科学与生活(2021年30期)2021-02-18
中国新闻周刊(2021年2期)2021-01-29
小溪流(故事作文)(2018年10期)2018-12-28
小布老虎(2017年4期)2017-08-10
创作与评论(2017年11期)2017-06-30
装备制造技术(2016年8期)2016-10-20
中国建筑金属结构(2015年2期)2015-11-29