虚拟仿真资源在工业机器人实训教学中的设计与应用
2023-02-28 16:35邢晓莉马骞张丽
现代信息科技 2023年20期
关键词:工业机器人
邢晓莉 马骞 张丽
摘 要:对工业机器人编程软件的仿真功能进行了研究,利用工业机器人编程软件的仿真功能,基于真实设备开发虚拟仿真资源,能够将在真实设备上不易观察到的、发生后代价高的现象在仿真中解决,有效化解工作场景进不去、看不见、动不了、难再现的难题。教学实践证明这种方法能够实现实体教学和虚拟仿真教学的优势互补、无缝对接,构建以学生为中心虚实融合的职业教育教学新模式,帮助学生在不断尝试和试错过程中培养解决实际问题的工程实践能力和创新能力,具有借鉴和推广价值。
关键词:工业机器人;虚拟仿真工作站;RobotStudio;Smart组件
中图分类号:TP39;G434 文献标识码:A 文章编号:2096-4706(2023)20-0177-04
Design and Application of Virtual Simulation Resources in Practical Training Teaching of Industrial Robots
XING Xiaoli, MA Qian, ZHANG Li
(School of Intelligent Manufacturing, Xinxiang Vocational and Technical College, Xinxiang 453001, China)
Abstract: The simulation function of industrial robot programming software is studied, and the simulation function of industrial robot programming software is used to develop virtual simulation resources based on real equipment, which can solve the phenomena that are not easily observed on real equipment and costly after occurrence in simulation, effectively solving the problem that the working scene cannot be entered, seen, moved and reproduced. The teaching practice proves that this method can realize the complementary advantages and seamless connection between physical teaching and virtual simulation teaching, build a new model of vocational education teaching with student-centered integration of virtual and actual reality, and help students cultivate engineering practice ability and innovation ability of solving practical problems in the process of continuous trial and error, which has the value of reference and promotion.
Keywords: industrial robot; virtual simulation workstation; RobotStudio; Smart component
0 引 言
随着工业机器人技术的成熟以及我国制造业的转型升级,工业机器人在各行各业中的应用日益广泛,许多高职院校为满足社会发展需求,开设了工业机器人相关课程。但在实训教学中普遍存在高投入、高损耗、高风险和难实施、难观摩、难再现的三高三难问题,将信息化技術、仿真技术与传统教学模式有机结合是解决三高三难问题的有效途径。
工业机器人本身就是信息技术的产物,使用的编程软件就有仿真功能,教育工作者可以利用技术优势,开发虚拟仿真资源创新传统教学模式,实现实体教学模式和虚拟仿真教学模式的优势互补,突破实训教学对实体教学的依赖,拓展实训教学内容的广度和深度,延伸实训教学的时间和空间,从而有效解决工业机器人实训中的三高三难问题,提升实训教学的质量,培养高素质技术技能人才。
本文以ABB工业机器人为例,介绍虚拟仿真资源在工业机器人实训教学中的开发与应用。
1 整体设计方案
基于行业企业真实生产场景及生产工艺流程,提炼行业关键技术,利用数字孪生技术,开发虚拟仿真资源,服务高职院校工业机器人方向专业课程的实训教学,实现“项目对接,虚实结合”,切实提高学生理论联系实际能力、工程实践能力和创新能力[1,2]。
方案主要包括工业机器人实体工作站和虚拟工作站两部分。实体工作站来源于企业真实生产案例,由机器人系统和外围设备构成,支持开展实体实训教学项目。虚拟工作站1:1还原实体工作站,由虚拟控制器驱动机器人本体模型动作,智能组件驱动外围设备模型动作实现仿真效果,支持开展仿真实训教学项目。实体实训与仿真实训无缝对接,运行结果能够相互验证、互为支持[3]。
2 实体工作站
2.1 结构组成
机器人装配汽车离合器工作站如图1所示,由工业机器人、可编程控制器、产品输送链、放螺母装置、AGV小车和其他外围设备组成。用PLC将机器人、产品输送链、其他外围设备通过通信连接与控制,实现了机器人与其他外围设备的协同作业。因IRB2600机器人具有占地面积小、操作节拍快等优点,是装配作业的最佳选择。
2.2 工艺流程
先由放螺母装置在空托盘上放置预埋螺母,然后产品输送链把空托盘送到装配工位,举升气缸举起空托盘,工业机器人先抓取压盘放置暂存台,再依次抓取盖、钢圈1、模簧、钢圈2搬运到空托盘上进行装配,装配零件。装配完成后举升气缸下降,输送鏈将托盘和装配好的产品送至打钉工位,由打钉气缸对装配好的产品进行打钉。
3 仿真工作站
仿真工作站使用ABB公司的RobotStudio工业机器人仿真软件,根据实体工作站内的真实设备和工艺流程,分工作站布局、Smart组件设计和I/O连接及工作站逻辑设计3个阶段开发。
3.1 工作站布局
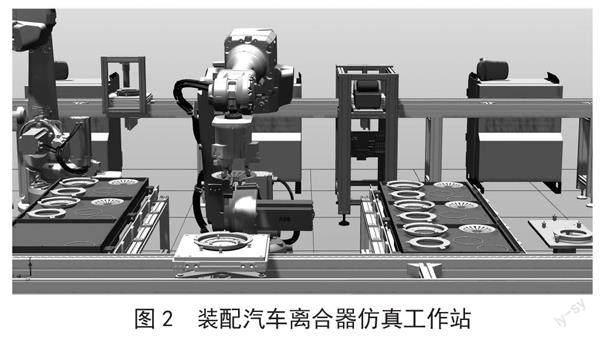
在RobotStudio软件中先从ABB模型库导入IRB2600机器人,再将使用达索公司的CATIA软件按照与实物1:1的比例设计的机器人夹具、产品输送链、托盘、零件平台等外围设备的三维仿真模型,生成STP格式文件后由软件相应接口导入,最后根据实体工作站中设备的布局,摆放模型在虚拟工作站内的位置,如图2所示。
3.2 Smart组件设计
在RobotStudio仿真软件中完成工作站布局后,用Smart组件采用模块化设计思想,能够赋予模型动作或逻辑特性,实现系统内的设备既能独立动作又能协调联动,真实模拟实际设备的运行效果。
装配工作站Smart组件的设计主要包括:
1)机器人夹具Smart组件。为实现对内径不同的零部件抓取,在机器人末端装有专用夹具,利用夹爪外撑抓取各零件,搬运到空托盘上进行装配。在夹具上安装有传感器检测工件,同时在夹具的气缸上安装有磁性开关检测工件是否夹紧,实现自动装配。
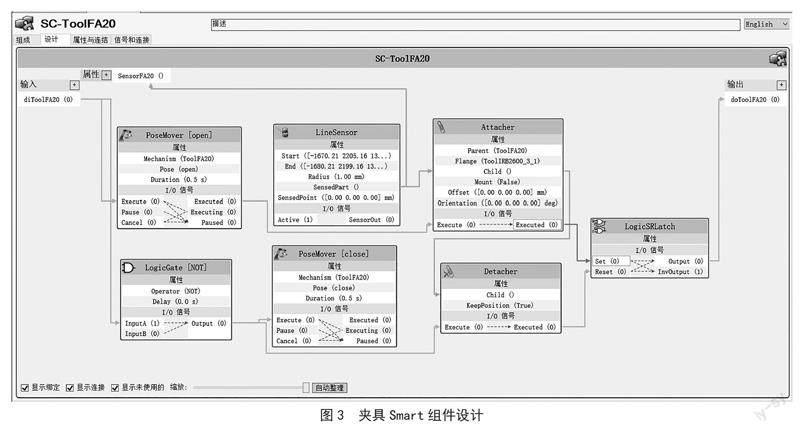
在RobotStudio中可以用安装的方法,实现两个零部件的装配效果。但是,要将离合器盖、钢圈、模簧放入托盘定位模具中装配成一体,并能随托盘一起沿着产品输送链运动,就不能用安装的方法实现,要用Smart组件的动态属性。因此在设置夹具Smart组件SC-ToolFA20的属性与联结时,首先要将其动态属性SensorFA20设置为Part类型,并在属性联结中将LineSensor线性传感器监测到的对象SensdPart设置为SC-ToolFA20的目标属性SensorFA20。夹具Smart组件设计如图3所示。
2)产品输送链与零件装配Smart组件。在添加装配离合器盖Smart组件的子组件时,除了要添加Source子组件产生拷贝、PoseMover子组件控制机械装置运动、LineSensor子组件检查零件、Attacher子组件实现安装、Detacher子组件实现拆除以及逻辑子组件以外,还要添加SetParent子组件用来设置图形为父对象,才可以实现产品输送链与零件装配的动态效果。
3.3 工作站I/O信号及逻辑
工作站I/O信号及逻辑具体内容有:
1)工作站I/O信号。机器人装配现场通过PLC将机器人、产品输送链、放螺母装置以及其他外围设备进行连接,通过Profibus等现场总线接收处理工作站发来的信号,执行相应的动作。机器人配置有下挂在DeviceNet现场总线上的标准板卡DSQC652,并配置有对应的数字信号和组信号[4-7]。
2)工作站逻辑。工作站逻辑就是将机器人的I/O信号与相应Smart组件的I/O信号相互关联,这时的Smart组件相当于PLC,可以模拟PLC与机器人I/O通信过程。离线编写完成机器人装配程序,并进行同步和仿真设定后,就能仿真装配工作站的运行效果[8]。
4 平台应用
虚拟仿真能够将在真实设备上不易观察到的、发生后代价高的现象在仿真中解决,有效化解工作场景进不去、看不见、动不了、难再现的难题。更重要的是虚拟仿真能够实现以学生为中心的“做中学,学中做”,激发学习热情,帮助学生在不断尝试和试错过程中培养工程实践能力和创新能力。利用该虚拟仿真平台可以开展以下仿真实训教学。
4.1 碰撞监测分析及路径优化
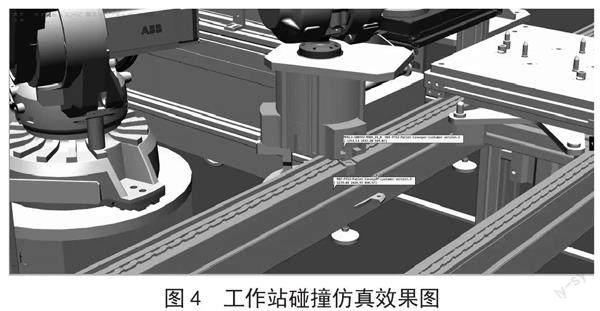
机器人在装配零件的过程中,要防止与外围设备发生碰撞,保证零件装配精度,就要合理规划机器人运动路径,确保机器人在运动过程中与外围设备之间保持合理距离。可以使用软件的碰撞监测功能,在仿真前设定要监测的对象,对装配过程进行实时监控。仿真运行中就会实时显示设定对象是否发生碰撞,并且能显示碰撞对象的名称以及碰撞点的坐标,机器人装配过程中的碰撞仿真效果图如图4所示,根据碰撞监测结果可以实时修改机器人装配路径,从而达到优化路径锻炼学生路径规划能力的教学目的[9]。
4.2 应用工件坐标及数组优化程序
在机器人装配汽车离合器工作站中,两个料台分别位于机器人左右两侧,料台上工件摆放位置和顺序完全相同,相当于把左侧的料台平移到了右侧。这样可以在左右料台上分别创建工件坐标,只需要示教一侧料台上的目标点位,示教点位就由原来的121个减少到了61个实现优化程序,大大降低现场示教工作强度,提高效率。
另外,同一料台上每套工件的间距是一样,两个料台又是平移的位置关系。这种情况下,用创建数组的方法,只需要示教第一套工件的目标点位,其他各套工件的目标点位可以用偏移的方法获取。这样示教点位数就由61个减少到11个,能够更进一步优化程序。
4.3 轴配置错误分析及机器人姿态调整
在程序调试过程中,经常会遇到由于机器人轴配置错误,造成停止运行的故障。机器人到达目标点,可能存在多种关节轴组合情况,即多种轴配置参数[10-12]。一般报轴配置错误的原因有两种。
1)程序默认轴配置监控是打开的,所以机器人只能按照指定的轴配置移动到目标点,如果机器人不能按照指定的轴配置移动到目标点,就会报轴配置错误。
2)如果机器人从当前点位移动到目标点的过程中,某个关节轴的旋转角度大于90度,也会报轴配置错误。
通常情况会采用关闭轴配置监控或添加过渡点、将MoveL用MoveJ替换的方法来解决。经过尝试以上三种方法均不能解決机器人轴配置错误问题。
经过分析和数据对比,采用在左右两侧料台创建工件坐标和创建数组点位平移的方法编程,虽然能够将示教点位由原来的121个点减少到11个点,但是在左右两侧装配时,机器人一轴方向是相反的,左侧的轴配置数据是[-2,-1,0,0],右侧的轴配置数据是[-1,-1,0,0],所以就不能只更换工件坐标,直接将左侧的点位平移到右侧使用,还需要重新给平移到右侧的点位指定轴配置数据为[-1,-1,0,0],调整机器人姿态,这样才能最终解决轴配置错误造成机器人停止运行的故障。
4.4 装配速度分析及指令优化
通过改变设定speeddata、VelSet以及AccSet和运动指令中的速度参数,可以优化生产线工艺节拍,也可以在不改变机器人运动速度的情况下,将触发指令Set用运动触发指令TriggIO和TriggL替换实现节拍优化。指令替换后装配一套汽车离合器节拍平均提高1 s,从而提高生产效率。
基于虚拟仿真资源在教师引导下,学生在不断发现问题解决问题、深入探究的过程中,不仅培养了精益求精的高级工匠精神和职业素养,而且培养了解决实际问题的工程实践能力和创新能力。
5 结 论
通过连续几年的建设和发展,截至目前,工业机器人实训教学虚拟仿真资源使用已达近6 000人次。实践证明虚拟仿真为实训教学提供了新环境、新资源、新方式,能够显著改善教学条件,实现对传统实训教学模式的创新再造,构建信息时代以学生为中心的职业教育教学新模式。我校学生在2015年全国职业院校技能大赛工业机器人技术应用赛项,获得国赛一等奖成绩。通过虚拟仿真资源的研发与实践应用,我校工业机器人技术专业教学团队的教学和科研能力显著提高,已获得12项计算机软件著作权授权,分别在2020年和2021年获得河南省职业院校技能大赛教学能力比赛二等奖。虚拟仿真资源在保障我校工业机器人实训课程远程技能教学方面发挥了重要作用,对其他职业院校具有借鉴和推广价值。
参考文献:
[1] 王玲玲,姜丽娜,富立,等.能力达成导向的机器人虚拟仿真课程教学设计与实践 [J].高等工程教育研究,2022(5):57-61+67.
[2] 郝建豹,林子其,龚俭龙,等.在线工业机器人技术虚拟仿真平台的构建 [J].实验技术与管理,2019,36(11):113-116.
[3] 冯凌云,刘凯.虚实结合的工业机器人实践教学平台开发与应用 [J].实验技术与管理,2021,38(5):223-229.
[4] 高茂源,王好臣,丛志文,等.基于RobotStudio的机器人上下料工作站仿真分析与优化 [J].组合机床与自动化加工技术,2020(8):60-63.
[5] 刘海燕,苏宇,林春兰,等.基于RobotStudio的生产线下料系统设计与仿真 [J].制造技术与机床,2019(5):67-71+75.
[6] 田国柱,丁洁.基于RobotStudio的多工业机器人制链生产线的仿真设计 [J].组合机床与自动化加工技术,2018(12):123-124+133.
[7] 朱文华,史秋雨,蔡宝,等.基于RobotStudio的工业机器人工艺仿真平台设计 [J].制造业自动化,2020,42(12):28-31+89.
[8] 叶晖.工业机器人工程应用虚拟仿真教程 [M].北京:机械工业出版社,2014.
[9] 郝建豹,查进艳,谢炼雅.基于多机器人的虚拟装配工作站设计与碰撞检测仿真 [J].组合机床与自动化加工技术,2017(12):37-40.
[10] 龚仲华,龚晓雯.ABB工业机器人编程全集 [M].北京:人民邮电出版社,2018.
[11] 胡伟.工业机器人行业应用实训教程 [M].北京:机械工业出版社,2016.
[12] 叶晖.工业机器人典型应用案例精析 [M].北京:机械工业出版社,2013.
作者简介:邢晓莉(1974—),女,汉族,河南新乡人,副教授,高级技师,本科,研究方向:工业机器人技术及应用;马骞(1984—),男,汉族,天津人,助教,技师,本科,研究方向:机电一体化;张丽(1982—),女,汉族,河南新乡人,讲师,技师,硕士研究生,研究方向:机电一体化技术。
收稿日期:2023-04-18
基金项目:2022年河南省职业教育教学改革研究与实践项目“职业院校工业机器人技术专业混合教学模式研究与实践”(豫教〔2023〕03107)
猜你喜欢
中国科技纵横(2016年20期)2016-12-28
科技创新与应用(2016年34期)2016-12-23
青春岁月(2016年22期)2016-12-23
汽车科技(2016年6期)2016-12-19
科技创新导报(2016年21期)2016-12-17
科技视界(2016年25期)2016-11-25
中小企业管理与科技·下旬刊(2016年10期)2016-11-18
科技视界(2016年18期)2016-11-03
企业导报(2016年13期)2016-07-19
科技视界(2016年15期)2016-06-30