
工业机器人工作站系统集成工学结合课程开发
2016-06-30 18:35梁舒王清于娜
科技视界 2016年15期
梁舒+王清+于娜
【摘 要】在工学结合课程体系中,典型工作任务是课程开发的核心环节,一般一门专业课对应一项典型工作任务,开设专业课的目的是为学生胜任某项典型工作任务奠定基础。本文结合邢台职业技术学院工业机器人技术专业《工业机器人工作站系统集成》这门课程工学结合开发过程,介绍了课程定位、典型工作任务分析、学习目标确定、学习内容选取、学习情境与学习内容设计五个方面的内容。
【关键词】工业机器人;工学结合;课程开发
【Abstract】In curriculum system combine with work and study, typical tasks are the core areas of curriculum development, generally a course correspondence a typical tasks, the creation of specialized courses are intended for students to be competent to lay the foundation of an typical tasks. In this paper, Xingtai Polytechnic College Robotics professional“industrial robot workstation systems integration” course combining learning with the development process, describes the course location, typical tasks analysis, learning objectives identified learning content selection, learning contexts and learning content design five content aspects.
【Key words】Industrial Robot; Combination of Work and Study; Course Development
0 前言
目前,工业机器人已在众多领域得到了应用。其中,汽车、电子产品、冶金、化工塑料、橡胶等行业是中国使用机器人最多的几个行业,未来几年,随着企业转型升级的迫切需要和劳动力成本的不断提高,以及国家的战略需求,中国机器人市场增长潜力会非常巨大。对于高职院校来说,开设工业工业机器人技术专业,应以培养工业机器人调试工程师和操作及维护人员为主要目标。培养的学生应具有扎实的工业机器人理论知识基础、熟练地工业机器人操作能力和丰富地工业机器人调试与维护经验。课程开发与实施是影响人才培养质量的重要环节,应用工学结合的开发理念:为了工作而学习,学习的内容是工作,通过工作实现学习,可以有效提高职业教育人才的培养质量。
1 课程定位
本课程是工业机器人技术专业的必修课程,工业机器人工作站包括工业机器人系统及外围控制系统,具体涉及工业机器人搬运工作站、焊接工作站、去毛刺工作站和上下料工作站。通过该课程的学习,使学生掌握工业机器人的操作、工业机器人的接口技术、外围设备控制系统的设计、工业机器人的调试和维护等能力,进一步可获得工业机器人编程员证书。《工业机器人工作站系统集成》是一门专业专项能力课程,它涉及自动控制、计算机、传感器、电子技术和机械工程等多种学科的内容,该课程的核心技能是工业机器人的工作站的设计、调试和维护应用技能,满足工业机器人及系统的安装、调试、运行、维护等岗位群的需要。
2 典型工作任务分析
根据专业调研资料,在汽车、机械加工、新能源等行业,职业岗位主要分成3类:工业机器人示教编程、工业机器人系统维护(包括工业机器人焊接系统维护岗和工业机器人机床上下料系统维护岗)、工业机器人系统集成(包括工业机器人工装辅助设计岗和工业机器人通用系统集成岗)。其中本门课程的开发就是基于工业机器人系统集成这个典型工作任务进行的。具体的典型工作任务包括如下几个方面。
(1)对机器人操作对象工装要求进行分析;
(2)工装系统机械机构辅助设计;
(3)工装系统电气控制系统设计;
(4)工装机电系统联调;
(5)工装系统说明文件编制。
(6)工业机器人工作站方案辅助设计;
(7)工业机器人工作站系统仿真辅助设计;
(8)工业机器人工作站主控系统程序辅助设计;
(9)工业机器人系统程序示教;
(10)工业机器人工作站系统说明文件编制。
3 学习目标确定
工学结合专业课学习目标是对学生胜任该课程对应的典型工作任务所预期达到的程度。经过对典型工作任务的归纳总结,学完本课程后,学生应当能够从事工业机器人工作站系统集成的工作,具体包括如下:
(1)能分析客户需求情况;
(2)能根据客户需求情况选择工业机器人;
(3)能根据客户需求选择外围控制系统;
(4)能设计机器人与主控的基本接口;
(5)能针对客户需求编制基本设计方案;
(6)能使用工业机器人仿真软件进行系统仿真;
(7)能使用电气仿真软件进行控制系统仿真;
(8)能编制基本主控系统程序;
(9)能根据对象对机器人视觉系统进行基本设置;
(10)会设置工业机器人坐标系统;
(11)会设置工业机器人作业原点;
(12)会使用工业机器人常用指令;
(13)会编制工业机器人工作站基本使用说明;
(14)会编制工业机器人工作站系统基本维护说明。
4 学习内容确定
工学结合课程体系下的学习内容和实际工作有着直接的联系,结合工业机器人工作站系统集成的学习任务和实际教学的可操作性,提炼出四种典型的工业机器人工作站,每种工作站的学习内容如下所示。
4.1 搬运机器人工作站
搬运机器人工作站的学习内容包括:搬运机器人的选型,搬运组件的选型、安装及调试;外围控制系统设计及部署;搬运工具TCP参数设置;搬运机器人离线编程仿真;搬运机器人工作站维护与保养。
4.2 焊接机器人工作站
焊接机器人工作站的学习内容包括:焊接机器人的选型,焊接组件的选型、安装及调试;外围控制系统设计及部署;焊接工具TCP参数设置;平面焊接轨迹编程;焊接机器人离线编程仿真;复杂焊接轨迹编程;焊接机器人工作站维护与保养。
4.3 去毛刺机器人工作站
去毛刺机器人工作站的学习内容包括:去毛刺机器人的选型,去毛刺组件选型、安装及调试;外围控制系统设计及部署;浮动去毛刺工具TCP参数设置;简单轮廓轨迹编程;去毛刺机器人离线编程仿真;去毛刺机器人工作站维护与保养。
4.4 上下料机器人工作站
上下料机器人工作站的学习内容包括:机器人机床上下料系统安装调试;机器人上下料系统外部控制程序编制;工业机器人示教编程;机器人机床上下料系统维护保养。
5 学习情境和学习任务设计
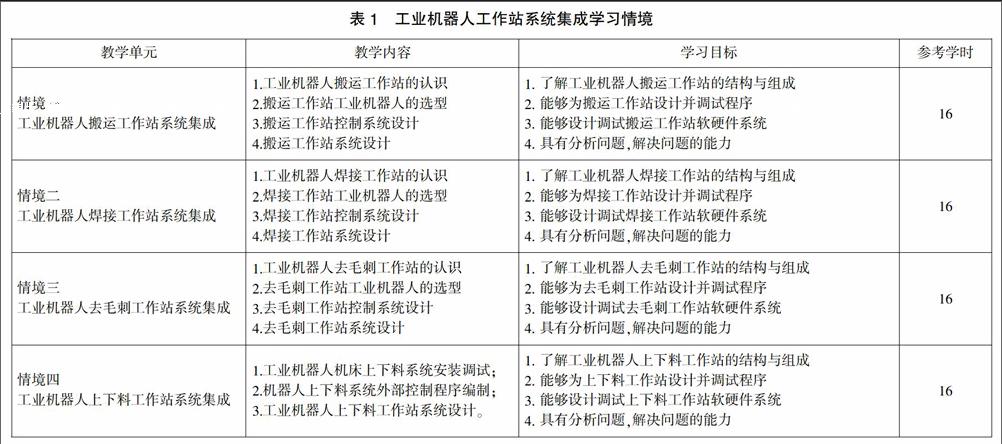
在学习目标和学习内容的基础上,进行学习情境的划分及排序,确定各学习情境的学习任务构成学习单元。工业机器人工作站系统集成的学习情境如表1所示。
6 结语
综上所述,在工业机器人工作站系统集成的开发过程中,始终坚持了工学结合专业课的开发是以该课程对应的典型工作任务为起点,基于典型工作任务分析,结合学校实际条件,确定课程学习目标,梳理支撑学习目标的学习内容,划分学习情境,以任务为载体将学习内容合理组织起来,并细化任务承载的单元学习目标和学习内容。
【参考文献】
[1]刘彩琴.职业教育工学结合课程开发与实施[M].北京:北京师范大学出版社,2014.
[2]牛祥永.高职“工业机器人安装与调试”课程开发和实践[J].职业教育研究,2014,3:86-90.
[3]杨薇,叶晖,胡威.仿真教学应用在工业机器人技术课程教学中的必要性[J]. 科技视界,2014,32:18.
[责任编辑:杨玉洁]
猜你喜欢
文理导航(2016年30期)2016-11-12
考试周刊(2016年85期)2016-11-11
