基于聚类算法的轨道交通履带式消防机器人的应用
2023-02-28 09:46张杨刘国成
现代信息科技 2023年20期
张杨 刘国成
摘 要:对履带式消防机器人的构型进行分析,简化其构型设计为四轮机器人,并建立相应的坐标系。通过对其运动模型进行规律分析,得出单侧履带上所有点的运动速度规律,完成了功能模块的设计,再根据功能模块的设置完成对机器人的硬件结构设计。将履带式消防机器人所采集视频图像中每个像素点的色彩值作为特征向量,将所有采集到的视频图像构成一个样本集合,把图像分割任务转换为数据集合的聚类任务,运用K-means聚类算法进行图像区域分类,获取所需的分离图像。
关键词:聚类算法;轨道交通;履带式机器人;消防巡检
中图分类号:TP391.4;TP242 文献标识码:A 文章编号:2096-4706(2023)20-0062-05
Application of Crawler-type Firefighting Robot in Rail Transit Based on Clustering Algorithm
ZHANG Yang, LIU Guocheng
(Guangzhou Railway Polytechnic, Guangzhou 510430, China)
Abstract: This paper analyzes the configuration of a crawler-type firefighting robot, simplifies its configuration and design as a four wheeled robot, and establishes the corresponding coordinate system. By analyzing the laws of its motion model, the velocity patterns for all points on the single track are obtained. The design of the functional module is completed, and the hardware structure of the robot is designed according to the settings of the functional module. The color values of each pixel in the video image collected by the crawler-type firefighting robot are used as feature vectors, and all collected video images are formed into a sample set. The image segmentation task is transformed into a clustering task of the data set, and the K-means clustering algorithm is used for image region classification to obtain the required separated images.
Keywords: clustering algorithm; rail transit; crawler-type robot; fire patrol inspection
0 引 言
履帶式机器人凭借其接地比压小、越野机动性能好、牵引附着性强、综合运动性能优等特点广泛应用于野外非结构化场景中。本文对履带式机器人的运动规律及特性进行了分析,并在分析总结的基础上构建其运动学模型。针对轨道交通消防巡检中的使用场景进行了履带式机器人的硬件设计,同时还进行了基于K-means聚类算法的图像分割软件设计。
1 构型分析
从履带式机器人的运动原理上分析,履带式机器人使用滑动转向。机器人的行走机构平台达到稳定运动和滑动转向的效果,需要保持左(右)侧轮子转速一致,如图1所示。
履带式机器人单侧履带可以视为由“多个小轮子”组成,且这种单侧“多个小轮子”的“转速”是一致的。因此,履带式机器人的转向是通过控制两侧履带(或轮子)的相对速度实现的,这与四轮驱动机器人的转向方式是一致的,都可以实现滑动转向,但履带对地面产生的摩擦力和压力分布有别于轮式。
不同类型履带式机器人的运动控制是一个非常复杂的问题。本文以经典基础构型的履带式机器人运动模型为研究对象,如图1所示。履带式机器人的运动方式(直线或圆周运动)是由两侧履带的速度共同决定的,图中单侧绘制了2个电机以作示意,需要对两侧履带的转动速度进行联合控制。尽管机器人的实际构型因实际应用场景的不同而有所不同,但其运动模型的基本原理是一致的。本文以图1中的机器人构型为例进行运动学分析建模,抽象简化其为等效模型,构建履带式机器人的运动学模型。
2 运动模型分析
2.1 建立履带式机器人坐标系
根据以上构型分析,可以参考四轮驱动式机器人运动坐标系建立的方式,建立履带式机器人平台的坐标系。
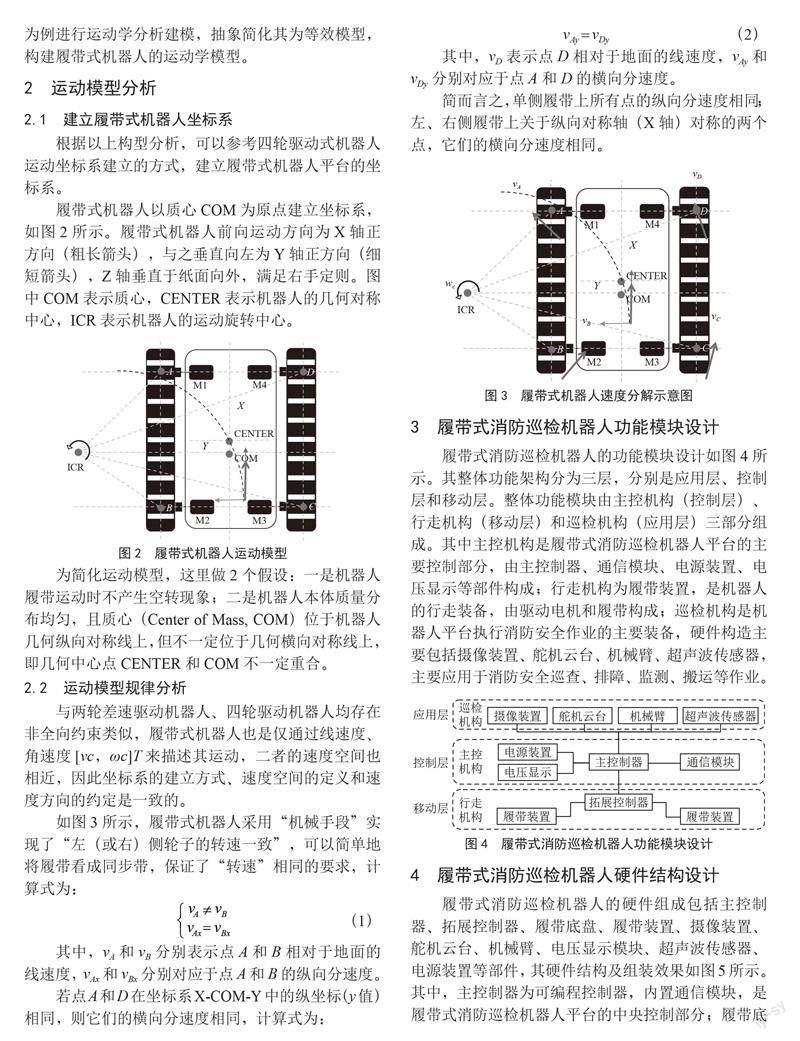
履带式机器人以质心COM为原点建立坐标系,如图2所示。履带式机器人前向运动方向为X轴正方向(粗长箭头),与之垂直向左为Y轴正方向(细短箭头),Z轴垂直于纸面向外,满足右手定则。图中COM表示质心,CENTER表示机器人的几何对称中心,ICR表示机器人的运动旋转中心。
为简化运动模型,这里做2个假设:一是机器人履带运动时不产生空转现象;二是机器人本体质量分布均匀,且质心(Center of Mass, COM)位于机器人几何纵向对称线上,但不一定位于几何横向对称线上,即几何中心点CENTER和COM不一定重合。
2.2 运动模型规律分析
与两轮差速驱动机器人、四轮驱动机器人均存在非全向约束类似,履带式机器人也是仅通过线速度、角速度[vc,ωc]T来描述其运动,二者的速度空间也相近,因此坐标系的建立方式、速度空间的定义和速度方向的约定是一致的。
如图3所示,履带式机器人采用“机械手段”实现了“左(或右)侧轮子的转速一致”,可以简单地将履带看成同步带,保证了“转速”相同的要求,计算式为:
其中,vA和vB分别表示点A和B相对于地面的线速度,vAx和vBx分别对应于点A和B的纵向分速度。
若点A和D在坐标系X-COM-Y中的纵坐标(y值)相同,则它们的横向分速度相同,计算式为:
vAy = vDy (2)
其中,vD表示点D相对于地面的线速度,vAy和vDy分别对应于点A和D的横向分速度。
简而言之,单侧履带上所有点的纵向分速度相同;左、右侧履带上关于纵向对称轴(X轴)对称的两个点,它们的横向分速度相同。
3 履带式消防巡检机器人功能模块设计
履带式消防巡检机器人的功能模块设计如图4所示。其整体功能架构分为三层,分别是应用层、控制层和移动层。整体功能模块由主控机构(控制层)、行走机构(移动层)和巡检机构(应用层)三部分组成。其中主控机构是履带式消防巡检机器人平台的主要控制部分,由主控制器、通信模块、电源装置、电压显示等部件构成;行走机构为履带装置,是机器人的行走装备,由驱动电机和履带构成;巡检机构是机器人平台执行消防安全作业的主要装备,硬件构造主要包括摄像装置、舵机云台、机械臂、超声波传感器,主要应用于消防安全巡查、排障、监测、搬运等作业。
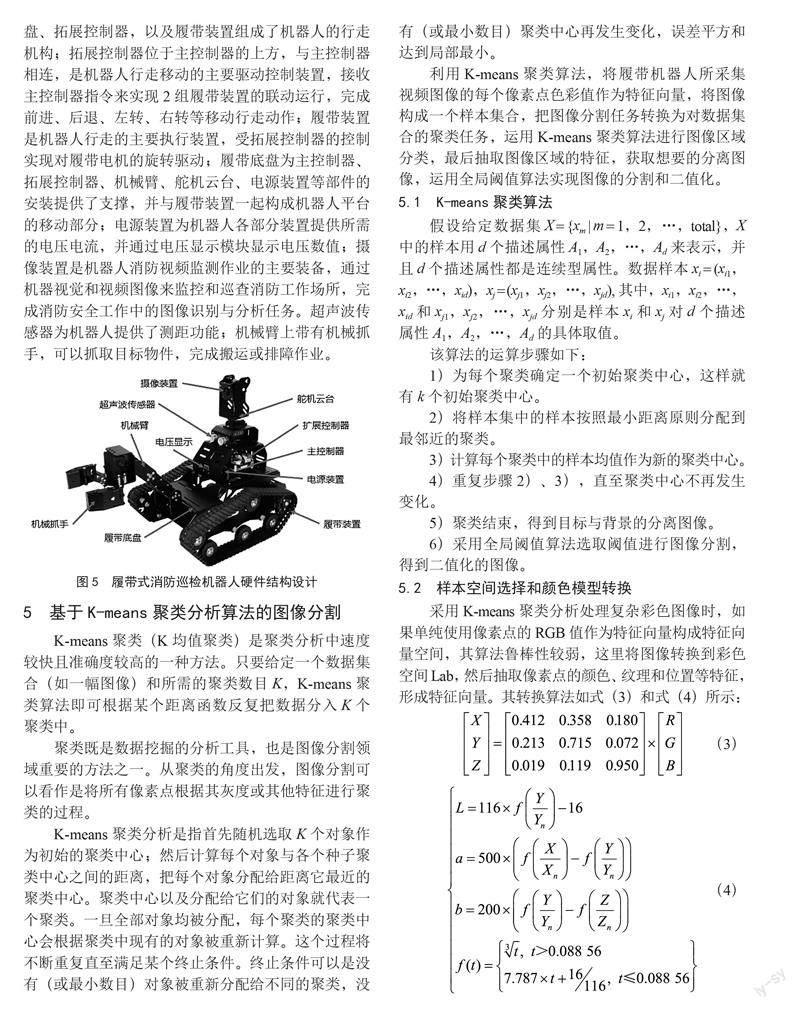
4 履带式消防巡检机器人硬件结构设计
履带式消防巡检机器人的硬件组成包括主控制器、拓展控制器、履带底盘、履带装置、摄像装置、舵机云台、机械臂、电压显示模块、超声波传感器、电源装置等部件,其硬件结构及组装效果如图5所示。其中,主控制器为可编程控制器,内置通信模块,是履带式消防巡检机器人平台的中央控制部分;履带底盘、拓展控制器,以及履带装置组成了机器人的行走机构;拓展控制器位于主控制器的上方,与主控制器相连,是机器人行走移动的主要驱动控制装置,接收主控制器指令来实现2组履带装置的联动运行,完成前進、后退、左转、右转等移动行走动作;履带装置是机器人行走的主要执行装置,受拓展控制器的控制实现对履带电机的旋转驱动;履带底盘为主控制器、拓展控制器、机械臂、舵机云台、电源装置等部件的安装提供了支撑,并与履带装置一起构成机器人平台的移动部分;电源装置为机器人各部分装置提供所需的电压电流,并通过电压显示模块显示电压数值;摄像装置是机器人消防视频监测作业的主要装备,通过机器视觉和视频图像来监控和巡查消防工作场所,完成消防安全工作中的图像识别与分析任务。超声波传感器为机器人提供了测距功能;机械臂上带有机械抓手,可以抓取目标物件,完成搬运或排障作业。
5 基于K-means聚类分析算法的图像分割
K-means聚类(K均值聚类)是聚类分析中速度较快且准确度较高的一种方法。只要给定一个数据集合(如一幅图像)和所需的聚类数目K,K-means聚类算法即可根据某个距离函数反复把数据分入K个聚类中。
聚类既是数据挖掘的分析工具,也是图像分割领域重要的方法之一。从聚类的角度出发,图像分割可以看作是将所有像素点根据其灰度或其他特征进行聚类的过程。
K-means聚类分析是指首先随机选取K个对象作为初始的聚类中心;然后计算每个对象与各个种子聚类中心之间的距离,把每个对象分配给距离它最近的聚类中心。聚类中心以及分配给它们的对象就代表一个聚类。一旦全部对象均被分配,每个聚类的聚类中心会根据聚类中现有的对象被重新计算。这个过程将不断重复直至满足某个终止条件。终止条件可以是没有(或最小数目)对象被重新分配给不同的聚类,没有(或最小数目)聚类中心再发生变化,误差平方和达到局部最小。
利用K-means聚类算法,将履带机器人所采集视频图像的每个像素点色彩值作为特征向量,将图像构成一个样本集合,把图像分割任务转换为对数据集合的聚类任务,运用K-means聚类算法进行图像区域分类,最后抽取图像区域的特征,获取想要的分离图像,运用全局阈值算法实现图像的分割和二值化。
5.1 K-means聚类算法
假设给定数据集X = {xm | m = 1,2,…,total},X中的样本用d个描述属性A1,A2,…,Ad来表示,并且d个描述属性都是连续型属性。数据样本xi = (xi1,xi2,…,xid),xj = (xj1,xj2,…,xjd),其中,xi1,xi2,…,xid和xj1,xj2,…,xjd分别是样本xi和xj对d个描述属性A1,A2,…,Ad的具体取值。
该算法的运算步骤如下:
1)为每个聚类确定一个初始聚类中心,这样就有k个初始聚类中心。
2)将样本集中的样本按照最小距离原则分配到最邻近的聚类。
3)计算每个聚类中的样本均值作为新的聚类中心。
4)重复步骤2)、3),直至聚类中心不再发生变化。
5)聚类结束,得到目标与背景的分离图像。
6)采用全局阈值算法选取阈值进行图像分割,得到二值化的图像。
5.2 样本空间选择和颜色模型转换
采用K-means聚类分析处理复杂彩色图像时,如果单纯使用像素点的RGB值作为特征向量构成特征向量空间,其算法鲁棒性较弱,这里将图像转换到彩色空间Lab,然后抽取像素点的颜色、纹理和位置等特征,形成特征向量。其转换算法如式(3)和式(4)所示:
由式(5)可知,两个数据样本之间的距离越小,表示两个数据样本越相似,差异度越小,反之,两个数据样本之间的距离越大,表示两个数据样本越不相似,差异度越大。
5.4 选择评价聚类性能的准则函数
在样本相似性度量的基础上,还需要一个指定的准则函数才能把同一类的数据对象聚合成一个簇。聚类准则函数用于判断聚类质量的高低,误差平方和准则函数是常用的有效函数。采用误差平方和准则函数来评价聚类性能。假设X包含K个聚类子集X1,X2,Λ,Xk,各个聚类子集中的样本数量分别为n1,n2,Λ,nk,各个聚类子集的聚类中心分别为m1,m2,Λ,mk,则误差平方和准则函数如式(6)所示:
相似度的算法如下:
1)将所有对象随机分配到k个非空的簇中。
2)计算每个簇的平均值,并用该平均值代表相应的簇。
3)根据每个对象与各个簇中心的距离,分配给最近的簇。
4)然后转到步骤2),重新计算每个簇的平均值,这个过程不断重复直至满足某个准则函数才停止。
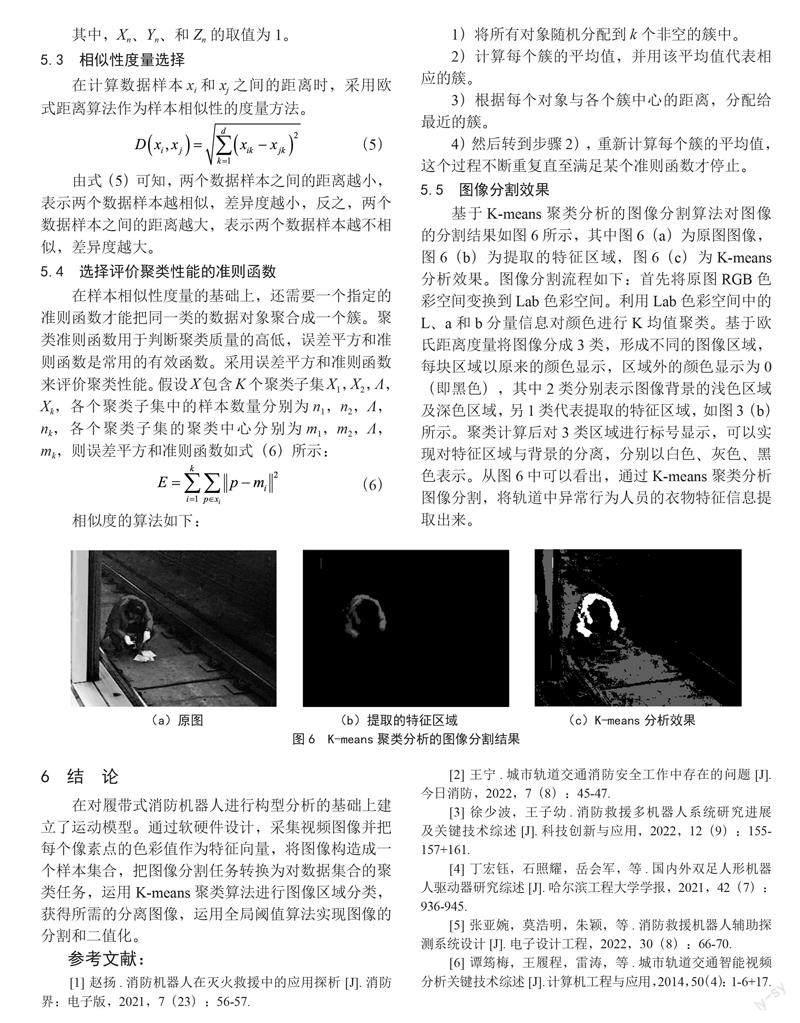
5.5 圖像分割效果
基于K-means聚类分析的图像分割算法对图像的分割结果如图6所示,其中图6(a)为原图图像,图6(b)为提取的特征区域,图6(c)为K-means分析效果。图像分割流程如下:首先将原图RGB色彩空间变换到Lab色彩空间。利用Lab色彩空间中的L、a和b分量信息对颜色进行K均值聚类。基于欧氏距离度量将图像分成3类,形成不同的图像区域,每块区域以原来的颜色显示,区域外的颜色显示为0(即黑色),其中2类分别表示图像背景的浅色区域及深色区域,另1类代表提取的特征区域,如图3(b)所示。聚类计算后对3类区域进行标号显示,可以实现对特征区域与背景的分离,分别以白色、灰色、黑色表示。从图6中可以看出,通过K-means聚类分析图像分割,将轨道中异常行为人员的衣物特征信息提取出来。
6 结 论
在对履带式消防机器人进行构型分析的基础上建立了运动模型。通过软硬件设计,采集视频图像并把每个像素点的色彩值作为特征向量,将图像构造成一个样本集合,把图像分割任务转换为对数据集合的聚类任务,运用K-means聚类算法进行图像区域分类,获得所需的分离图像,运用全局阈值算法实现图像的分割和二值化。
参考文献:
[1] 赵扬.消防机器人在灭火救援中的应用探析 [J].消防界:电子版,2021,7(23):56-57.
[2] 王宁.城市轨道交通消防安全工作中存在的问题 [J].今日消防,2022,7(8):45-47.
[3] 徐少波,王子幼.消防救援多机器人系统研究进展及关键技术综述 [J].科技创新与应用,2022,12(9):155-157+161.
[4] 丁宏钰,石照耀,岳会军,等.国内外双足人形机器人驱动器研究综述 [J].哈尔滨工程大学学报,2021,42(7):936-945.
[5] 张亚婉,莫浩明,朱颖,等.消防救援机器人辅助探测系统设计 [J].电子设计工程,2022,30(8):66-70.
[6] 谭筠梅,王履程,雷涛,等.城市轨道交通智能视频分析关键技术综述 [J].计算机工程与应用,2014,50(4):1-6+17.
[7] 吕彦杰.模块化消防机器人的设计及应用 [J].信息系统工程,2022(4):105-108.
[8] 薛八阳,杨忠,钟山,等.基于目标跟踪的区域入侵检测方法研究 [J].电子测量技术,2015,38(2):51-54+63.
[9] 李鹍,吴宁,宋明,等.基于级联滤波器深度学习的铁路安检人脸识别与验证研究 [J].铁路计算机应用,2018,27(6):17-20.
[10] 王欣宇.视频监控中特定区域入侵检测算法设计与实现 [J].计算机技术与发展,2014,24(10):159-162+166.
[11] 叶立仁,何盛鸿,赵连超.复杂环境下的遗留物检测算法 [J].计算机工程与科学,2015,37(5):986-992.
作者简介:张杨(1979-),女,汉族,河北廊坊人,副教授,工学博士,研究方向:机电一体化、机器人。
收稿日期:2023-06-16
基金项目:广州市科技计划项目(202102080208)
猜你喜欢
机械工业标准化与质量(2022年3期)2022-08-12
城市轨道交通研究(2022年4期)2022-04-16
装备制造技术(2020年3期)2020-12-25
电子测试(2018年1期)2018-04-18
无线互联科技(2016年14期)2017-02-06
软件导刊(2016年12期)2017-01-21
现代电子技术(2016年23期)2017-01-12
电脑知识与技术(2016年8期)2016-05-19
科技视界(2016年8期)2016-04-05
智能建筑电气技术(2015年5期)2015-12-10