
基于粒子群算法的改建道路纵断面自动设计研究
2023-02-21 16:17:56董华珍
城市道桥与防洪 2023年1期
董华珍,聂 涔
(1.广州地铁设计院施工图咨询有限公司,广东 广州 510010;2.广州地铁设计研究院股份有限公司,广东 广州 510010)
0 引言
随着我国国民经济的持续快速发展、城市化进程的加快,机动化程度得到很快的发展,私家车己逐渐进入普通市民的家庭当中。根据公安部发布的统计数据,截至2021 年6月,我国机动车保有量达到2.92 亿辆,其中千人机动车保有量已从2002 年的62 辆[1]增至2021 年的200辆,增幅超过3 倍。机动车保有量的激增使得原有的城市道路满足不了人们对城市道路的需求。
近年来,城市道路交通已经从迅猛发展的高潮期逐步过渡到改造维护的存量时代。随着城市土地资源的越发紧张,旧路改造已经成为改善现状道路交通条件的关键手段。在道路改造时,既有道路的平面线形基本定格,受限于道路红线的约束,道路改造一般情况下会保持原有的平面线形不变。受常年累月的交通荷载、自然环境、路面结构病害等因素的影响,道路纵断面往往发生较大的沉降变化,导致竖向行车舒适性大大降低。因此,纵断面设计是道路改造较关键的环节。
从20 世纪60 年代开始,计算机技术开始应用于公路设计中。经过多年的发展,形成了诸多成熟的市政道路设计软件,如HY-SZDL、EICAD、RDCADS、纬地道路、OpenRoads Designer 等。市场上应用的这些道路设计软件,仅是提供人机交互操作平台,软件的纵断面设计方法由设计师在软件界面上手动拉坡、反复调整拉坡方案,需要耗费大量的设计精力处理复杂的设计条件。同时还受限于设计人员的技术水平和经验的主观性,往往难以取得理想的设计方案。旧路改造工程要求纵断面线形与现状道路的地面线尽量贴合,保证纵断面填挖方工程量尽量小,传统的人机交互拉坡设计方法难以满足设计的需要。将复杂的设计条件抽象成数学模型,利用人工智能算法进行优化求解,已经成为新的设计潮流。目前关于纵断面自动设计的研究,多集中在铁路与公路方面[2-4]。铁路与公路一般的纵断面受限于地面的起伏情况,一般情况下纵断面的起伏较大,属于比较粗犷的纵断面设计类型。而市政道路改造纵断面波动较小,属于精细化方面的设计,然而目前关于这方面的研究很少,而且基本上是传统的数值解法,不够智能化、自动化[5-6]。
笔者通过分析改建道路纵断面设计要点和现有道路设计软件纵断面设计功能局限性,首次将粒子群算法用于城市道路改建当中,以道路路面改造工程量最小为目标,建立了基于粒子群算法道路改造纵断面自动设计模型。该模型可大大提升设计效率,提高设计质量,减少工程投资。
1 数学模型
道路纵断面是由一系列的变坡点组成的,抽象成数学参数为变坡点里程、高程和竖曲线半径。其中,变坡点里程和高程是确定纵断面位置和坡度的关键因素。在道路改造的纵断面设计中,竖曲线半径起到平顺过渡坡度的作用,其取值一般受限于保证竖曲线半径、竖曲线长度满足规范最低要求即可,整体上起到一个缓和与辅助的作用。因此,本文不将竖曲线半径作为优化参数,后续在满足规划约束的条件下,通过变坡点的相邻坡度差来适应和匹配竖曲线半径。
因此,将每个变坡点的里程mi1、高程hi1变量编码成粒子群向量,如下:

1.1 目标函数
城市道路改造工程的纵断面设计思路,主要是根据路面结构改造的具体方案,纵坡的设计尽量贴合拟改造道路的现状高程,尽量减少填挖方的工程量,以节省工程投资[5]。
改造的纵断面设计抽象成数学模型,即求解多变量函数的条件极值问题。也就是在满足道路改造所遵循的规范与标准等前提下,得到工程改造量最小的设计方案。实际工程中,计算工程总费用较为复杂,需要考虑土石方、桥涵、隧道、横断面形式等因素。但在道路改造工程中,主要的工程量都是集中在道路纵断面中线上的填挖方总和。因此,为了简化数学模型,将目标函数定义为:纵断面中线上的填挖总和。其表达式定义如下:

式中:f(x)为纵断面设计标高;h(x)为纵断面地面标高;g(x)为权函数,针对不同的横断面时,可以调整不同的断面影响值。
1.2 约束条件
1.2.1 坡长约束
《城市道路路线设计规范》对最小坡长与最大坡长进行了规定,旧路的一般路段设计坡长应能满足规范要求的最小坡长限制,且应考虑路线尽端道路起(讫)点一端可不受最小坡长限制。一般情况下,设计速度不变,旧路的原设计最大坡长能满足规范要求,故暂不考虑最大坡长约束。因此,本模型坡长约束考虑最小坡长满足规范要求,即L≥Lmin,且起终点及与旧路交叉口路段不受最小坡长限制。
1.2.2 坡度约束
为满足竖向排水的要求,规范规定道路最小纵坡为0.3%。但在实际改造的情况中,受到施工精度、路基沉降等影响,道路实际坡度难以避免会有小于0.3%的情况。对于最小纵坡小于0.3%的情形,按规范要求设置相应排水措施。因此,最小纵坡不做要求。
道路的最大纵坡应满足道路设计规范的要求,即:i≤imax。
1.2.3 竖曲线半径
为保证行车视距合理,竖向离心加速度舒适可行,竖曲线半径应满足规范规定,即:R≥Rmin。一般竖曲线长度需保证车辆3 s 行程的要求,有I≥Imin。
1.2.4 平纵组合
《城市道路路线设计规范》对设计速度不小于60 km/h 的道路强调线形组合设计,保证指标均衡、视觉良好、安全舒适;对设计速度小于60 km/h 的道路的线形组合则没有硬性要求。故本研究暂不考虑对设计速度小于60 km/h 的道路的线形组合的约束。
1.3 粒子群算法求解
粒子群算法(particle swarm optimization,PSO)是一种源于鸟群觅食行为的算法[7]。该算法具有计算速度快、并行性高、收敛速度快、参数少、稳定性强等特点,在工程领域内多变量求优化解上有广泛的应用[8-9]。
算法中将每个粒子组编成一个n 维向量,每个粒子根据自己当前的位置和速度,参考群体中的经验,每时每刻都进行动态调整,通过不断的进化迭代,达到群体目标最优的状态。
具体的变量编码形式如下:
Xi=(Xi1,Xi2,Xi3,…,Xin)表示粒子i 当前的位置;
Vi=(Vi1,Vi2,Vi3,…,Vin)表示粒子i 当前的速度;
Pi=(Pi1,Pi2,Pi3,…,Pin)表示是粒子i 的个体最好位置;
Pg=(Pg1,Pg2,Pg3,…,Pgn)表示整个群体中的最好位置。
粒子进化的方程如下:

式中:Vij(t+1)为粒子i 中第j 个变量在t+1 时刻的速度;Xij(t)为粒子i 中第j 个变量在t 时刻的位置;Pij(t)为粒子i 中第j 个变量在t 时刻的最优解;Pgj(t)为整个种群中第j 个变量在t 时刻最优解;w 为速度变化权重;c1,c2为学习因子;r1,r2为(0,1)区间内均匀分布的随机数。
同时,为了保证粒子不超越搜索空间,通常给粒子的速度设定一个变化范围。
基于粒子群算法求解的具体步骤如下。
Step1:种群初始化
以原始的设计方案为基础,将每个变坡点的里程mi1、高程hi1变量编码成粒子群向量,如下:

竖曲线半径取值在满足规范的要求下,根据相邻坡段的坡差进行确定,一般情况下取整千的数值。具体确定方式如下:

式中:lmin表示最小竖曲线长度;Δi 表示变坡点i 的相邻坡差的绝对值;Rmin表示最小竖曲线半径;ceil()表示向上取整的函数。
对初始线路表示的纵断面向量分别进行随机扰动,形成多条新的纵断面方案。
Step2:初始化适应度计算
分别计算step1 中生成的每个粒子的适应度。为了进一步简化目标函数,采用数学中微元求和的思想,在纵断面上每隔1 m 取一个点,进行纵断面中线上填挖方总量的累积求和。具体适应度函数的计算方法如下:
式中:f(i)为里程i 处的纵断面设计高程;h(i)为里程i 处的地面线高程;g(i)为里程i 处权函数,若道路横断面形式一致,则取g(i)=1;M 为约束惩罚项,若粒子不满足相应的约束条件,则M 取一个很大的值,若粒子满足规范约束,则M=0。
将初始的粒子群中的各个粒子的评价值作为各个粒子的个体历史最优解j,并寻找各子群中的最优解PL和总群体中的最优解Pg。
Step3:迭代优化。
不断迭代以下步骤,直到满足收敛条件或达到最大迭代次数。
(1)对每一个粒子,按照粒子进化方程更新。
(2)计算每一个粒子的适应度。
(3)若粒子的当前适应度优于其历史最优适应度,则记该粒子的当前适应度为该粒子的历史个体最优适应度。同时记当前位置为该粒子历史个体最优位置。
(4)寻找当前各子群中的最优解和总群体中的最优解,若分别优于各自的历史最优解,则更新PL、Pg。
算法的终止条件:当算法进行迭代N 次后,适应度函数值趋于平缓,最终收敛于一个较优值时,即N代之后的个体最优解即本次优化的纵断面设计最优方案。经多次试验验证,当迭代次数达到400 多次时,适应度函数趋于收敛;设定迭代次数为500 次时,可以获得满意的成果。
2 实例验证及分析
为验证粒子群算法在道路改造纵断面优化设计中的可行性和有效性,本文进行了计算机编程求解验证。笔者选取两个经施工图审查合格的主干道改造项目(设计速度均为60 km/h)进行优化测试,并将优化方案(即基于粒子群算法的纵断面自动设计方案)与审查合格方案(以下称为“原始方案”)进行对比。
根据《城市道路路线设计规范》要求,60 km/h 设计速度的道路最小纵坡长度150 m,凹形竖曲线最小半径1 500 m,凸形竖曲线最小半径1 800 m,竖曲线最小长度120m(现状路接顺段不受此限)。
粒子群的参数设置:粒子数n=20,c1=c2=1.5,最大迭代次数N=500,对应变坡点里程的粒子最大速度为5,对应变坡点高程的粒子最大速度为0.1。
2.1 实例验证
实例1:某城市某旧路改造项目,道路等级为城市主干路,设计车速60 km/h,道路北起工业大道,南至金斗大桥,全长2 500 m。道路红线宽50 m,车行道宽26 m。据该沥青路面检测报告结果,路面技术状况评价为:结构强度为临界,其他评价指标等级为C,养护对策为中修或局部大修。路面改造设计方案为保留路面基层、新建沥青面层结构。新建沥青面层结构方案:4+5+7+调平层,旧路面层结构方案:4+5+7。
实例1 粒子群算法优化方案如表1、图1~图3所示。

表1 实例1 优化方案竖向要素

图1 实例1 优化方案迭代关系图
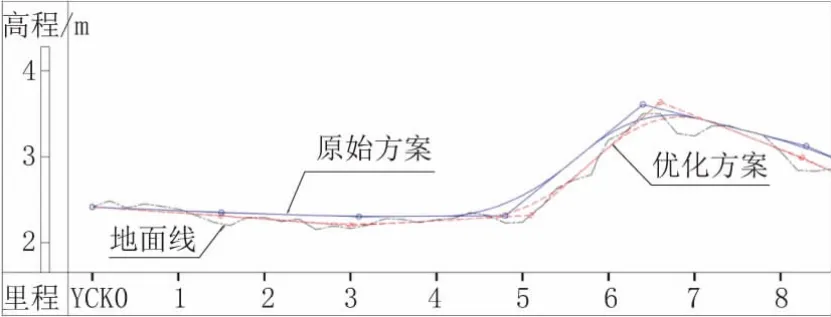
图2 实例1 优化方案与原始方案对比图(一)
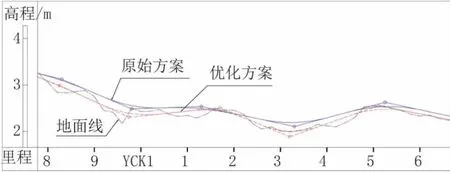
图3 实例1 优化方案与原始方案对比图(二)
实例2:某城市某旧路改造项目,道路等级为城市主干道,设计车速60 km/h,南起机场路,北至黄石东路,道路全长约4 km,红线宽60 m,车行道宽31 m。据该沥青路面检测报告结果,路面技术状况评价为:结构强度足够,其他评价指标等级为B、C,养护对策为保养小修或中修。旧路路面改造方案为铣刨4 cm沥青面层,加铺4 cm 沥青玛蹄脂碎石混合料(调平层另计)。
实例2 粒子群算法优化方案如表2、图4、图5所示。
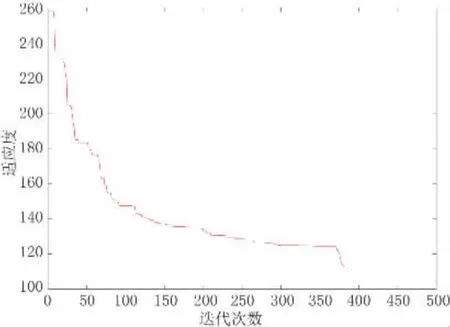
图4 实例2 优化方案迭代关系图

图5 实例2 优化方案与原始方案对比图(部分路段)
2.2 可行性分析
由表1、表2 可知,基于粒子群算法的纵断面设计方案的坡长、坡度、竖曲线半径及竖曲线长度均满足《城市道路路线设计规范》要求;改建路面纵断面设计线基本贴合旧路路面设计,与既有路面贴合性更好(图2、图3、图5),满足改建路面设计要求。由此可知,基于粒子群算法的纵断面自动设计方案是可行的。
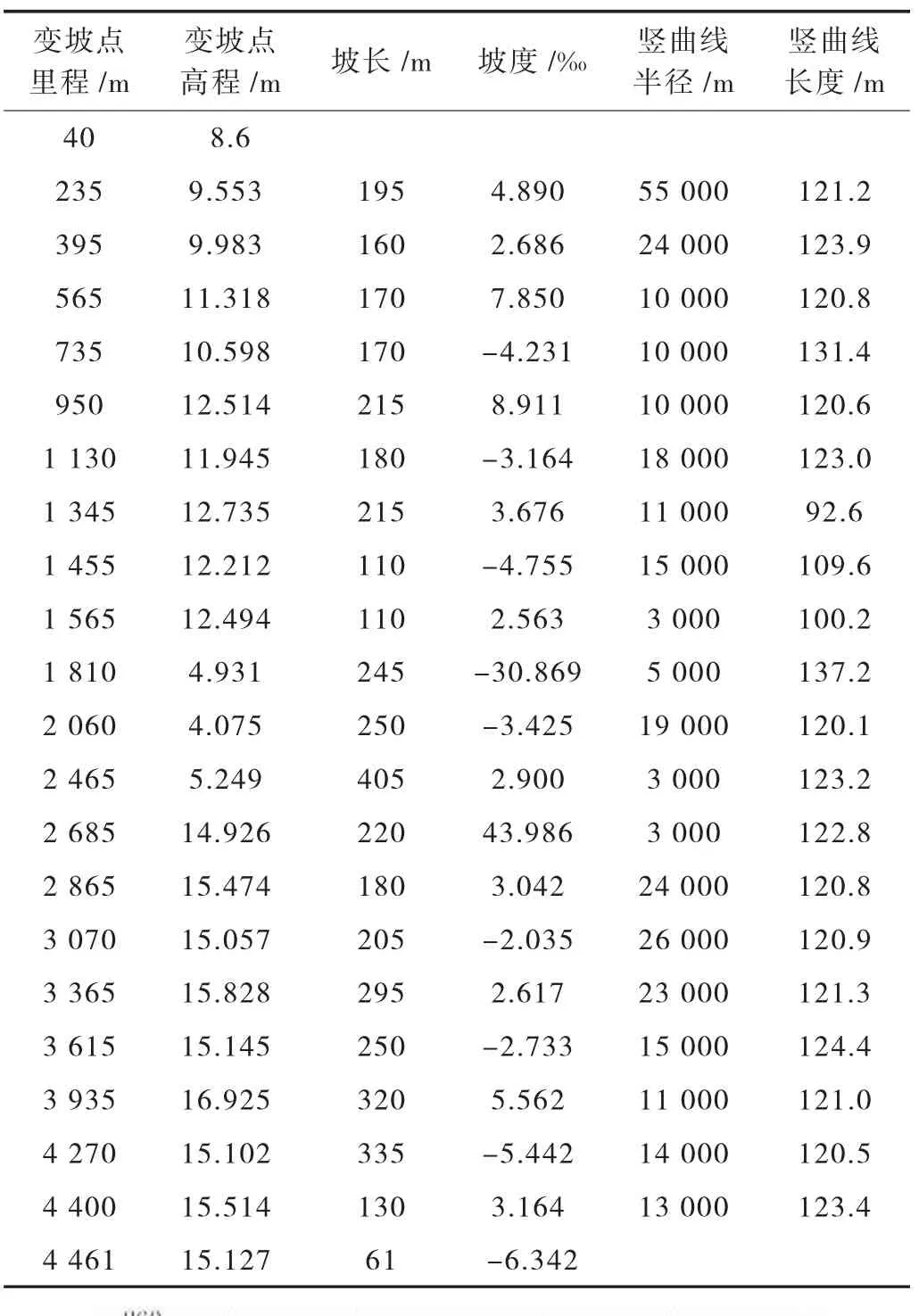
表2 实例2 优化方案竖向要素
2.3 有效性分析
从图1、图4 可知,基于粒子群算法的纵断面优化方案在前100 次迭代中适应度迅速下降,优化效果非常明显。当迭代次数达到400 次时,适应度函数趋于收敛,验证了模型的有效性。
2.4 方案比较
(1)优化方案纵断面与现状地面贴合度更高。根据程序运行结果及图1,实例1 原始方案的适应度为250.5,优化方案的适应度为140.6。根据程序运行结果及图4,实例2 原始方案的适应度为257.9,优化方案适应度为113.4。
(2)优化方案设计效率高。市场应用的道路软件人机交互拉坡设计需耗时0.5~2 d,本算法整体的优化过程耗时2.2 s,效率非常高。
(3)优化方案减少工程投资。实例1、实例2 优化方案与原始方案结果进行比较,优化方案的调平层或新增加铺工程量为原始方案的50.1%~55.6%,节省了近一半的新增加铺量,纵断面优化设计线更精确,更接近实际道路中线高程,优化效果显著。
3 结语
研究结果表明:该设计模型达到了改建道路纵断面自动适应贴合现状道路高程、路面改造工程量最小的目的。当粒子群算法迭代次数达到400 多次时,粒子适应度函数趋于收敛。当迭代次数设为500次时,可以获得满意的方案。
实例验证表明,与传统的人工交互拉坡设计相比,基于粒子群算法的纵断面自动设计方法与现状路面贴合度更高,设计效率更高,自动设计过程仅需2~3s;拟合原地面线的效果更好,能节省近一半的路面新增加铺量,优化设计效果显著。本算法为道路改造纵断面自动设计提供了有力的理论支撑,同时也极大地提升了设计效率、显著减少工程量,为设计决策提供重要参考。
猜你喜欢
铁道标准设计(2024年4期)2024-04-12 02:13:12
计算机仿真(2022年8期)2022-09-28 09:53:02
山东科学(2022年4期)2022-07-31 15:48:54
水土保持通报(2020年3期)2020-08-04 14:34:04
水土保持研究(2018年2期)2018-04-11 05:04:52
中国塑料(2016年11期)2016-04-16 05:26:02
地矿测绘(2015年3期)2015-12-22 06:27:30
安徽农业科学(2015年24期)2015-02-27 09:01:04
教育与职业(2014年16期)2014-01-19 01:24:36
水土保持研究(2012年2期)2012-12-21 09:14:24
