基于列车运行状态组合预测的虚拟应答器捕获方法
2023-02-15 18:50王思琦蔡伯根
中国铁道科学 2023年1期
王 剑,王思琦,蔡伯根,刘 江,程 君
(1.北京交通大学 电子信息工程学院,北京 100044;2.北京交通大学 北京市轨道交通电磁兼容与卫星导航工程技术研究中心,北京 100044;3.北京交通大学 计算机与信息技术学院,北京 100044;4.中国铁道科学研究院集团有限公司 通信信号研究所,北京 100081)
近年来,随着人工智能、物联网、大数据、云计算、北斗卫星等一系列高新技术与铁路行业领域的融合发展,中国高速铁路已经走向智能化发展道路[1]。作为铁路的“大脑”和“神经中枢”,列车运行控制系统(简称“列控系统”)有效地保证了列车的安全、可靠运行。在我国正在研发的新型列控系统[2-3]中,北斗卫星定位、5G 通信和人工智能等前沿新兴技术,将为列控技术领域注入新的内涵。
处于迅速发展进程的全球导航卫星系统(Glob⁃al Navigational Satellite System,GNSS)可以提供全天时、全天候的定位、导航和授时服务,将其用于列控系统实施车载自主化定位感知,有助于减少轨旁设备(如实体应答器、计轴和轨道电路等)需求,提高列控系统的灵活性及运行条件适应性。然而,仅依靠卫星定位难以满足列车定位在可用性、连续性和可靠性等方面的要求[4]。虚拟应答器(Virtual Balise,VB)技术考虑了将卫星定位技术引入列控系统带来的兼容性问题,能够实现卫星定位与列控系统的互操作,为我国新型列控系统的架构设计及装备研制提供了有益思路。
VB 实际上是一套车载列控系统的软件模块,代替实体应答器提供列车的绝对位置等信息,通过VB 的捕获判断实现应答器报文传输的触发。VB捕获时,会根据列车位置与预设在轨道上虚拟参考位置进行比较,确定列车经过参考点的时刻,并在相应时刻触发VB 报文传输,向车载子系统报告列车的位置。
目前,国内外相关研究侧重于VB 定位评估方法[5]、VB 定位检测逻辑[6]和VB 功能架构设计[7]3 个方面。作为实现VB 定位检测的关键步骤,正确的VB 捕获对于保证GNSS 的有效应用具有重要意义。常规VB 捕获算法基于固定捕获半径(Cap⁃ture Interval,CI)方法,以列车卫星接收机输出位置作为捕获识别位置,存在漏捕获和捕获精度低的风险。后陆续出现改进算法,如根据列车速度和接收机频率动态调整捕获半径大小[8]、根据列车速度和加速度预测VB 捕获[9]、采用滤波预测思想的VB捕获[10]等方法,在一定程度上提高了VB捕获时空性能。然而,现有算法没有考虑列车运行状态的复杂性和规律性,难以保障列车定位误差较大时的VB捕获性能。
本文首先分析常规VB 捕获算法的基本原理和存在的问题,为改进常规捕获方法,通过引入列车运行状态预测思想,设计基于列车运行状态预测的新型VB 捕获原理;然后,在考虑列车运行复杂性和规律性的基础上建立基于交互多模型(Interact⁃ing Multiple Model,IMM)结合容积卡尔曼滤波(Cubature Kalman Filter,CKF)的自适应IMMCKF方法和长短期记忆(Long Short-Term Memo⁃ry,LSTM)方法相结合的列车运行状态组合预测模型,辅助前向搜索策略进行VB 的预捕获判决和捕获识别;最后,依托京沈高铁的现场采集数据,对比不同的列车运行状态预测方法和VB 捕获方法的性能,验证提出方法的有效性及效果。
1 常规VB捕获原理
常规VB 捕获方法采用基于固定CI 的捕获策略,以VB 位置为中心设置一定的捕获区域,以定位单元输出的列车位置是否进入捕获区域实现捕获识别判决,并将列车定位位置作为VB 捕获标记位置。图1 显示了常规VB 捕获原理。图中:黑色直线表示列车运行轨道;R1和R2分别为不同大小的捕获半径,m;G1,G2,G3和G4分别为不同时刻观测到的运行列车的不同位置(表示列车位置时可采用三维空间坐标、二维平面坐标或一维运行里程等形式,此处以VB 捕获原理为重心,暂不涉及列车位置的具体表示形式);分别为G1,G2和G4对应的预测列车位置;均为G3对应的2 种可能的预测列车位置。由图1 可知:若选用R1作为捕获半径,则没有列车位置进入捕获区域,此时判定VB 为未捕获状态,会导致VB 漏捕获风险;若采用R2作为捕获半径,虽可在一定程度上保证VB 的捕获率,但易出现列车位置G2和G3均在捕获区域内的情况,易导致重复捕获判定风险。可见,捕获半径与VB 的捕获率、捕获误差(捕获判定位置与VB 的欧式距离)之间存在相互矛盾的关系,这使得常规VB 捕获方法存在漏捕获和捕获精度低的问题。

图1 常规VB捕获原理示意图
常规方法的改进方法,如基于列车速度预测思想的VB 捕获方法,通常假设列车在当前时刻处于匀速运动或匀加速运动,并以此预测下一时刻列车位置,计算列车经过VB 的时刻。例如在图1 中,若假设当前时刻列车位置为G2,当列车在短时间内存在机动运动时,这一捕获方法可能会导致下一时刻的预测列车位置为G′′3。可见,这种捕获方法虽在捕获精度上有所提高,但没有考虑列车实际运动情况,对位置的预测精度不足,仍存在漏捕获风险。
2 基于列车运行状态组合预测的VB捕获方法
2.1 新型VB捕获原理
为弥补常规VB 捕获方法的不足,提出1 种新型VB 捕获方法,其关键在于下一虚拟应答器(Next Virtual Balise,NVB)预捕获和VB 捕获识别2 个环节。先根据轨道电子地图信息[11]进行地图匹配,实现列车二维位置的校正和列车运行一维里程信息的计算,消除沿垂直股道方向的定位误差;再根据当前时刻的观测列车位置和下一时刻的预测列车位置进行NVB 预捕获判决和VB 捕获识别,提高VB的捕获性能。
1)NVB预捕获判决原理
设列车当前运行时刻为t,列车定位的时间间隔为∆T(∆T>0),则可按式(1)进行NVB 的预捕获判决。

式中:βVB为表示NVB 预捕获判决结果的0-1 决策变量,当列车触发VB 捕获识别时取值为1,反之取值为0;∆MNVB为当前时刻列车位置与NVB 位置之差,m;为t时刻起,预测得到列车在列车定位时间间隔∆T内的行驶距离,m;rt+∆T为t+∆T时刻的预测误差拟合值,随当前时刻列车速度动态变化,m。

图2 VB预捕获原理示意图
2)VB捕获识别原理
对通过NVB 预捕获判决的列车位置进行VB捕获识别,原理如图3所示。图中:∆t为前向递推的单位时间,是列车定位时间间隔∆T的等间隔划分;nVB为前向递推单位时间的序号,nVB<∆T/∆t,nVB∈Z。当确定与当前时刻列车运行状态最为匹配的列车运动模型后,利用最佳匹配模型继续进行前向递推,直到确定在第nVB个∆t时刻的搜索位置与VB 距离最近,此时对应的时刻t+nVB∆t即为VB 捕获识别时刻。可以看出,与常规基于固定CI的捕获方法相比,这种VB 捕获识别方法进一步缩小了VB捕获空间误差,能有效提高VB捕获性能。

图3 VB捕获识别过程示意图
由上述原理可知,列车运行状态的短期前向预测是本文所述VB 捕获原理的核心和前提,预测精度将直接影响NVB 预捕获判决的正确率和VB 捕获识别的空间性能,精确有效的列车运行状态预测方法因此成为VB捕获识别的关键环节。
2.2 列车运行状态预测方法
2.2.1 列车运行状态描述
列车运行状态复杂多变,存在静止、牵引、巡航、惰行和制动5种工况,单一的运动模型难以适应列车行进过程中可能出现的所有运行状态。对应5 种工况,现有研究多采用以下5 种列车运动模型的组合描述列车运行状态。
(1)常静止(Constant Stop,CS)模型:状态向量只含有位置分量,适用于列车到站和在线路上的短暂静止。
(2)常速度(Constant Velocity,CV)模型:适用于列车处于巡航工况,几乎恒速的运行状态。
(3)常加速度(Constant Acceleration,CA)模型:适用于列车加速度随时间有微小波动的情况。
(4)“当前”统计(Current statistical,CS)模型:认为下一时刻的加速度只可能在当前时刻加速度的一定范围内变化,且速度概率密度函数服从瑞利分布,适用于描述列车处于CV 与CA 之间的运行状态。为更贴近列车实际运行状态,赋值时进一步改进现有方法,考虑某一时刻的平均加速度不仅与前一时刻的最优估计加速度有关,还与前一时刻的平均加速度有关,对列车运行时刻t进行离散化,并用k表示离散后间隔更短的时刻,则k时刻系统的状态离散方程为

其中,

为进行区分,文中分别用“CS1”“CS2”表示静止模型和“当前”统计模型。
(5)常转弯(Constant Turn,CT)模型:用于描述列车在转弯时的运行状态,铁路轨道平面的线型包括直线、缓和曲线和圆曲线3 种,不同曲线对应不同的航向角,列车运行状态可以通过航向角的变化来表现出来,列车的航向角可利用轨道电子地图数据库中的线路信息计算得到。
2.2.2 基于自适应IMM-CKF 的列车运行状态预测方法
多种列车运动模型组合使用时,虽可通过增加模型的种类来更加充分地描述列车的复杂运动状态,但这又会增加模型间的竞争和算法的计算复杂度。为妥善处理模型间的竞争关系,考虑采用交互多模型算法融合5种列车运动模型。IMM算法在描述目标的实际运行状态时,通常使用2 种及以上的子模型,能够以模型概率的形式解释当前时刻下各模型对列车运行状态描述的合理性度量,表现出良好的定位跟踪性能[13]。
为解决模型的适配问题,考虑采用交互多模型结合容积卡尔曼滤波的自适应IMM-CKF 方法,对列车位置进行滤波估计和短期前向预测。相较于其他非线性滤波方法,CKF 算法具有运算量更小、滤波结果更精确的优势,适用于描述列车运行状态的非线性和复杂性。
使用自适应IMM-CKF 方法对列车运行状态进行滤波估计和前向预测。图4为基于自适应IMMCKF 的列车运行状态预测方法的具体步骤,主要分为以下4 步。图中:CKF1—CKF5分别为5 种列车运动模型的子滤波器(按照前述模型顺序依次编号为1—5);和Pk分别为k时刻列车运行状态的最优估计及其协方差。

图4 基于自适应IMM--CKF的列车运行状态预测方法步骤

步骤2:构造CKF 滤波。将5 种运动模型组成状态方程,并结合混合状态估计、混合协方差估计进行CKF 滤波的时间更新过程(即式(2)),得到每1 个模型在k时刻的先验状态估计和先验协方差;在通用横墨卡托格网系统(UTM)坐标系下,引入定位单元前一时刻的地图匹配航向角来扩展量测向量。k时刻的量测模型为
式中:Zk=(xk yk vk θk)T为量测向量;h(·)为描述量测向量与状态向量关系的量测函数;εk为量测误差向量,xk为列车在UTM 坐标系(地球质心为坐标原点)下k时刻的东向位置,m;yk为北向位置,m;vk为列车运行方向的速度,m·s-1;θk为航向角,rad;为东向速度,m·s-1;为北向速度,m·s-1;σxk,σyk,σvk和σθk分别为k时刻东向x、北向y、速度v和航向角θ噪声的标准差。
由式(5)可知,量测模型是非线性模型,采用CKF算法进行量测状态更新,其计算过程如下。


步骤4:更新马尔科夫转移矩阵并前向预测。标准IMM 算法中,马尔科夫矩阵根据先验信息和主观决策确定,并在计算过程中保持不变,这常常与实际列车运行状态不符,为此考虑改进IMM 算法,采用文献[14]提出的方法,对马尔科夫转移矩阵进行修改
相邻时刻的模型概率之差反映了子模型与实际运动状态的匹配程度,利用实时量测信息对马尔科夫矩阵进行更新的方式能够充分发挥匹配模型的优势。确定在当前时刻概率最大的模型后,以此作为最佳匹配模型并根据列车位置滤波估计进行列车位置的前向预测,就得到了列车在∆T时间内的预测行驶里程。
2.2.3 基于在线更新LSTM 的列车运行状态预测方法
解决列车运行状态预测问题可以采用时间序列预测方法[15]。作为1种非参数预测模型[16],LSTM模型对非平稳和非线性序列具有较好的拟合能力,已在船舶航迹预测、短期客流预测等时间序列预测中得到广泛应用,将其引入列车运行状态预测问题,可避免建立过于复杂的列车运动模型。算法具体实施步骤如下。
步骤1:数据预处理和特征确定。以定位单元输出信息作为试验数据,结合地图匹配和插值方法进行异常数据剔除和补全;考虑列车位置预测误差,为提升预测可靠度,引入第5个输入特征——∆T时间内列车的行驶里程∆M。
步骤2:数据归一化处理。采用min-max 标准化方法对数据进行归一化处理,减少因特征量纲及其取值范围的不同而对模型训练造成的影响。
步骤3:预测模型建立和参数选择。建立基于滑动窗口的LSTM 网络预测模型,以连续b(b为滑动窗口宽度)个时刻的特征数据作为LSTM 网络的输入,以下一时刻的列车运行特征数据作为输出,得到预测模型的表达式为

LSTM 神经网络中的参数众多,为使输出结果更符合列车运行实际,网络训练时根据经验设置不同的模型参数,并选择性能较优的训练网络及参数用于在线预测。
步骤4:模型训练和测试。根据滑动窗口对归一化处理的数据进行分割,划分训练集和测试集,进行模型的训练和测试;预测模型的预测误差用于控制模型迭代过程;根据测试集结果,在线更新模型初始化参数。
步骤5:基于实时数据的预测模型更新。考虑列车在实际运行中,司机、天气和临时限速等因素均会对列车运行状态造成影响,将历史训练模型的参数作为在线预测模型参数的初值,利用实时数据对当前模型参数进行微调,使更新后的模型更适用于实时列车运行状态。
2.3 基于组合预测的VB捕获方法
基于自适应IMM-CKF 的列车运行状态预测方法,短期预测精度较高,但需要较多的先验知识,且模型的预测精度依赖于模型参数的选择;基于在线更新LSTM 的预测方法,长期预测精度较高,但预测精度更依赖于数据的质量。采用组合预测的形式可以弥补单一模型预测性能的不足,平滑模型预测误差波动,提高列车运行状态预测准确度,更好地辅助NVB 预捕获判决和捕获识别,提高了VB捕获精度。
组合预测时,采用一定滑动窗口内的预测误差平方和倒数法确定自适应IMM-CKF 方法和在线更新LSTM 方法的权重,并对预测结果进行加权组合。以k时刻预测k+1 时刻,设自适应IMMCKF 方法和在线更新LSTM 方法得到的列车行驶里程分别为∆M′k+1,1和∆M′k+1,2,则组合预测结果∆M′k+1为

其中,
式中:wk,1和wk,2分别为k时刻自适应IMM-CKF方法和在线更新LSTM 方法的预测权重系数;Ek,1和Ek,2分别为k时刻2 种方法在滑动窗口内的预测误差平方和;q为从滑动窗口时刻(k-b+1 时刻)到k时刻2 种方法预测值的序号;∆Mq为对应时刻的观测列车行驶里程值;分别为对应时刻2种方法得到的预测列车行驶里程值。
基于列车运行状态组合预测的VB 捕获方法具体流程如图5所示,分为4个主要步骤。

图5 VB捕获方法流程
步骤1:获取列车位置和NVB 位置。利用高精度轨道电子地图将定位单元输出的列车位置投影到线路上,实现列车位置的校正和一维里程的转换;利用VB 模块从VB 数据库提取NVB 报文信息;利用几何地图匹配方法进行列车位置转换(即地图匹配过程),搜索轨道电子地图中与当前列车位置最近的2 个关键点(包含经度、纬度、高程和一维里程等信息),根据垂直投影定理,计算定位单元输出位置分别与2 个关键点间直线的投影位置,采用线性插值计算投影位置的一维运行里程,完成列车位置的校正和位置转换。
步骤2:列车运行状态组合预测。采用组合预测方法进行列车运行状态估计和前向预测,得到列车在t+∆T时刻的预测运行状态;考虑列车运行在固定的轨道上,在预测过程中,根据组合预测结果和轨道电子地图不断校正预测列车位置。
步骤3:NVB预捕获判决。根据列车运行状态组合预测结果和式(1)完成NVB预捕获判决,通过预捕获判决的列车定位信息将进行VB 捕获识别;若未通过预捕获判决,将继续跟踪列车的运行状态。
步骤4:VB捕获识别。根据自适应IMM-CKF方法各子模型概率计算结果,确定当前时刻下5个子模型中模型概率最大的模型,并认为该模型比较符合列车当前时刻运行状态;设该模型的状态转移矩阵为F,对列车定位时间间隔∆T进行等间隔∆t划分,确定等间隔的个数N为

预测列车运行状态,并根据预测结果不断前向递推,得到距t时刻第(nVB-1)个时间间隔∆t时的列车运行状态向量为
式中:Xt,1和Xt,2分别为列车在t时刻的运行状态Xt的东向和北向位置分量。
确定NVB 捕获识别位置,以t时刻列车与NVB 的距离(MNVB-Mt),t+nVB∆t时刻列车与NVB 的预测距离和t+ΔT时刻列车与NVB 的预测距离(Mt+∆M′t+∆TMNVB)共N+1 个距离的最小值,作为NVB 捕获识别位置,即第nVB个VB捕获空间误差EnVB为
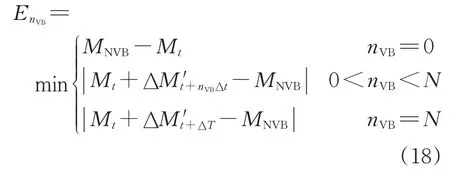
式中:Mt为当前时刻列车累积行驶里程。

从这一捕获流程可以看出,提出的新型VB 捕获方法具有如下特点:
(1)针对常规方法中列车位置前向预测精度较低的问题,新方法考虑了列车运行状态的复杂性和规律性,辅以高精度轨道电子地图,构建得到的列车运行状态预测模型可切实提高列车位置预测精度;
(2)针对常规方法中的VB 漏捕获问题,新方法增加了NVB 预捕获判决逻辑,能够在一定程度上降低VB漏捕获风险;
(3)针对现有常规方法中捕获空间精度较低的问题,新方法在确定VB 捕获识别位置和时刻时采用了前向递推搜索策略,能够一定程度上改善对VB的捕获性能。
3 验证与分析
采用2018 年8~9 月在京沈高铁现场采集的数据对所述VB 捕获方法进行验证分析。为确保列车定位连续从而保证VB 功能的可用性,试验中列车定位单元使用惯性传感器与普通卫星接收机信息进行融合;以高精度Novatel SPAN-FSAS GNSS/INS接收机的输出作为参考真值,接收机频率设置为1 Hz;为保证接收机解算位置的一致性,2 台接收机使用相同的天线。选择多趟列车日志数据用于LSTM 模型训练和测试,为了验证本文方法在实时列车运行状态预测和VB 捕获性能上的优势,选取8月31日的“黑山北—新民北—沈阳西”下行区段共1 684个定位数据作为实时数据。
试验开始前,使用高精度卫星接收机进行实地测量,使用特定软件对测量数据进行处理,制作得到用于列车定位和VB 功能实现的轨道电子地图。依据轨道电子地图数据,以1.5 km 等间隔地布设虚拟应答器52 个,记录应答器标号、经度、纬度和里程等信息,生成VB数据库。
3.1 模型参数初始化
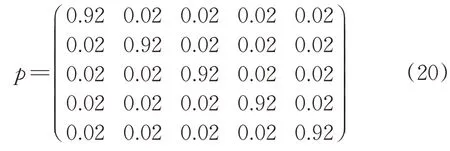
初始化自适应IMM-CKF 方法参数:采样周期取1 s;实际列车运行中,考虑到乘客的舒适度,一般列车的加速度不会大于1 m·s-2;初始化子模型概率μ0=马尔科夫转移矩阵初值为
确定在线更新LSTM 模型参数:通过多次试验调整模型参数,使用Adam 优化算法对网络权值进行更新,初始学习率为0.005,最大迭代次数为1 000 次,目标损失函数为均方误差;试验中保持模型其他参数不变,通过测试集测试不同参数(滑动窗口长度和隐藏层节点个数)设置下的模型预测性能,图6 显示了预测结果的均方根误差,由图6可知滑动窗口为5、隐藏层节点数为64 或256 时,预测结果的均方根误差相近且小于其他设置方法误差。综合考虑模型的预测性能和时效性,验证试验时设置滑动窗口长度为5、隐藏层节点数为64。

图6 不同模型参数下的均方根误差统计结果
3.2 列车运行状态预测性能
自适应IMM-CKF 方法对列车运行状态的描述直接决定了VB 捕获识别时前向搜索模型的选择。图7 显示了列车运行中自适应IMM-CKF 方法各子模型的概率。由图7可知:在列车静止时,CS1模型占有绝对优势,其模型概率大于99%;在列车处于加速和减速阶段时,CS2模型概率较大,当模型转换稳定时,CS2模型概率大于80%;总体而言,各子模型能够充分描述列车的不同运行状态。

图7 自适应IMM--CKF方法各子模型概率
利用模型预测结果与参考真值的偏差来评价模型的预测性能。表1 给出了3 种方法类型下7 种预测方法的预测误差性能,其他方法参数设置与本文方法一致。可见:数据驱动方法中,在线更新LSTM 方法的预测性能与标准门控循环单元(Gat⁃ed Recurrent Units,GRU)方法相当,均优于标准LSTM 方法;机动模型方法中,对比方法有IMM与扩展卡尔曼滤波(Extended Kalman Filter,EKF)相结合的IMM-EKF方法,自适应IMM-CKF方法的预测性能优于标准IMM-CKF 和IMM-EKF 方法;组合预测方法性能最优,预测结果的平均绝对误差分别比在线更新LSTM 方法和自适应IMMCKF方法低32.16%和12.91%。

表1 不同预测方法下的预测性能
3.3 VB捕获性能
本文方法得到某VB 捕获识别时刻的列车位置状态局部放大如图8 所示(UTM 坐标系)。显然,列车运行状态预测误差较小,VB 捕获识别位置与NVB 位置较近,直观地说明了本文所提方法的可行性。
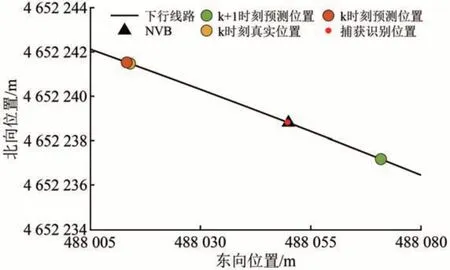
图8 某个VB的捕获识别状态局部放大
为了验证基于列车运行状态预测的VB 捕获方法性能,将现有VB 捕获方法、基于前述6 种预测方法的VB 捕获方法和本文方法进行对比验证,表2 给出了各方法的细节描述,其中:方法1~6 在VB 捕获逻辑上与本文方法存在较大不同;方法7~12 均为本文VB 预捕获判决方法,但采用不同列车运行状态预测方法和不同VB 捕获识别方法;方法13为本文方法。
为对比不同方法的计算耗时,统计不同捕获方法下,单周期VB 捕获计算的平均用时见表3。可见:13 种VB 捕获方法均满足列车进行实时探测VB 以及执行VB 捕获算法的需要;VB 捕获算法计算复杂度越大、平均用时就越长,因此相比于常规的基于CI 的VB 捕获方法(方法1~4),引入列车运行状态预测机制后,基于不同列车运行状态预测的VB 捕获方法(方法5~13)单周期捕获计算的平均用时较长;在基于预测思想的捕获方法中,数据驱动方法的单周期捕获计算平均用时明显大于机动模型方法。

表3 不同捕获方法下的单周期捕获计算的平均用时ms
为横向对比捕获率,图9 显示了不同捕获方法下的捕获率情况。由图9 可知:基于CI 的捕获方法其捕获率随着捕获半径的增大逐渐增加,呈正比关系;基于预测思想的VB 捕获方法的捕获率较高,但方法7~9和方法12均在第9个VB 出现了漏捕获现象,此时列车位置预测误差较大,未能通过NVB 预捕获判决;本文方法在保证VB 全部正确识别的前提下,进一步提高了VB 捕获率,相比于方法1提高捕获率88.46%。

图9 不同捕获方法下的捕获率
为横向对比捕获空间性能,以捕获误差衡量VB 捕获的空间精度。图10显示了本文方法对所有VB 的捕获误差情况。由图10可知,最大捕获误差小于0.5 m,满足列车定位需求。表4 给出了不同捕获方法下捕获误差的对比,由表4可知:对于基于固定CI的VB捕获方法,其最大捕获误差接近捕获半径,且存在不同捕获半径方法下最小捕获误差相等的情况,这主要是由CI 的捕获机制决定的;对于基于预测思想的VB 捕获方法,其捕获性能优于常规方法,但采用不同列车运行状态预测方法的VB 捕获方法中,基于数据驱动的VB 捕获方法捕获误差较大、基于机动模型的VB 捕获方法捕获误差较小;基于最佳匹配模型的前向搜索策略表现出明显的优势,本文方法的捕获误差综合性能优于其他方法,特别是相比其他基于预测思想的VB 捕获方法(方法5~12),本文方法在捕获误差均值上最低可实现1.55%、最高可实现70.23%的优化效果。
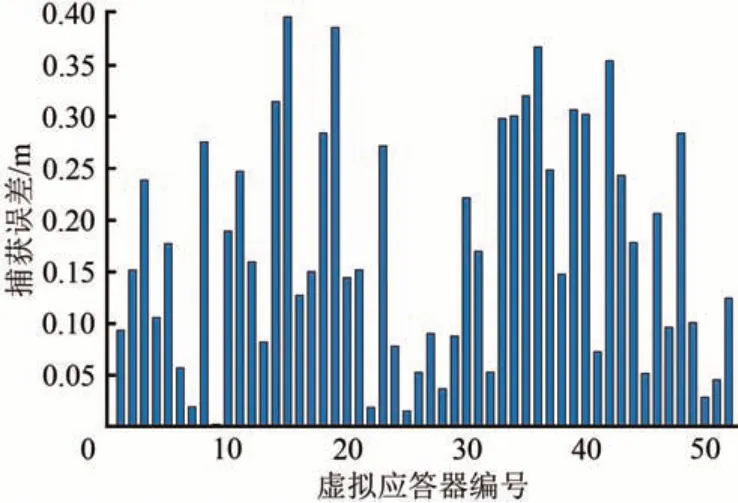
图10 VB捕获误差统计
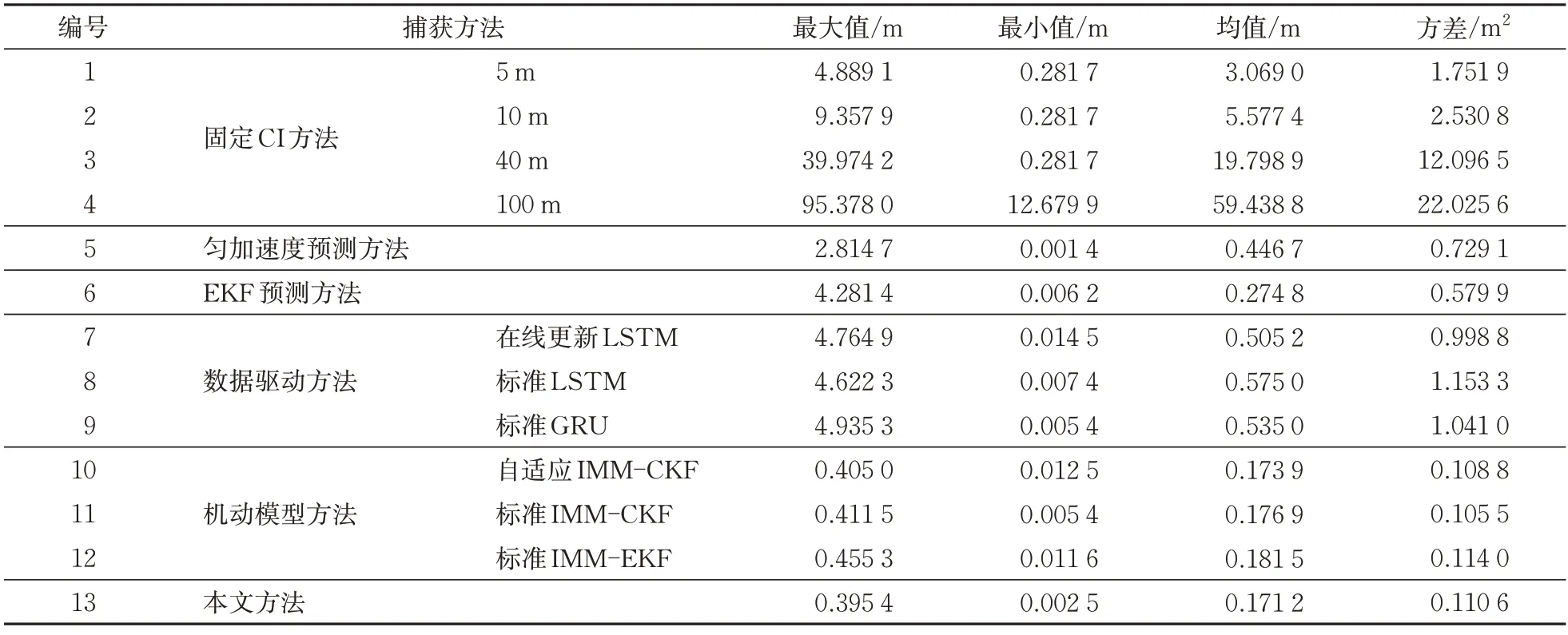
表4 不同捕获方法下的捕获误差
综上所述,基于列车运行状态组合预测的VB捕获方法具有较高的计算复杂度,单周期捕获计算平均用时较长,然而,相比于对比方法,其在列车运行状态预测精度、VB 捕获率和捕获性能方面具有明显的改善。在实际应用中需要权衡VB 捕获算法的实时性和实施性能,选择最佳的捕获算法,保障列车运行和控制的安全性。
4 结语
本文概述了国内外有关VB 的研究现状,分析了常规VB 捕获策略存在的问题,在此基础上,提出了列车运行状态预测思想的新型VB 捕获方法,并对其捕获原理进行了描述;在列车运行状态预测方面,考虑了列车运行状态的复杂性和规律性,使用自适应IMM-CKF 和在线更新LSTM 相结合的列车运行状态组合预测方法,辅助轨道电子地图,结合前向搜索策略完成了VB 预捕获判决和捕获识别;试验数据验证表明,列车运行状态组合预测方法相较于单一的自适应IMM-CKF 方法和在线更新LSTM 方法,预测误差分别减小了32.16%和12.91%;与现有捕获方法相比,所述方法在保证列车运行状态预测精度的前提下,VB 捕获率为100%,VB 捕获误差均值最高可实现70.23%的优化效果。本文方法打破了常规捕获方法将列车定位位置作为VB 捕获位置在捕获空间性能的局限性,提高了基于预测思想的VB捕获率和捕获精度。
论文后续工作中,将进一步关注VB 功能的可用性优化和捕获可靠性提升,若因VB 功能失效或捕获算法不可靠引起应答器报文丢失,将严重影响ATP系统的控车性能,进一步研究高性能的VB捕获算法对于保证列车的安全行驶具有重要意义。
猜你喜欢
环球人物(2022年4期)2022-02-22
小资CHIC!ELEGANCE(2021年32期)2021-09-18
小哥白尼(趣味科学)(2021年4期)2021-07-28
云南画报(2021年4期)2021-07-22
铁道通信信号(2020年1期)2020-09-21
小学生学习指导(低年级)(2019年6期)2019-07-22
铁道通信信号(2016年8期)2016-06-01
中国铁道科学(2015年6期)2015-06-21
中国火炬(2014年11期)2014-07-25
小学阅读指南·高年级版(2014年2期)2014-05-27