
智能膝关节功能锻炼设备的研究与设计
2023-02-08 08:45陈皓宇赵东亮李娜
医疗装备 2023年1期
陈皓宇,赵东亮,李娜
河南省洛阳正骨医院(河南省骨科医院)生物医学工程研究室 (河南洛阳 471000)
膝关节骨性关节炎(Knee Osteoarthritis,KOA)是一种以膝关节软骨的骨质增生、破坏、变性及关节边缘有骨赘形成等为特征的慢性关节病,临床以关节僵硬、活动不便等为常见特征[1]。根据流行病学调查结果显示,我国60 岁以上老人中的49%以上都患有膝关节骨性关节炎,随着人口老龄化进程的加快,该病的患病率不断增加[2]。现阶段骨性关节病的治疗方法主要包括药物治疗、物理治疗及手术置换关节等。但是药物治疗副作用较大,不宜长期应用;手术治疗则导致患者创伤较大[3]。功能锻炼是通过肢体活动来预防、治疗某些损伤性疾病,有助于机体功能恢复的一种方法,常被用于现代康复医学中[4]。功能锻炼通过增大膝关节的活动范围,有助于膝关节软骨滑膜液的扩散和渗透,消除膝关节周围组织粘连,增强膝关节的代偿能力与稳定性,预防肌肉萎缩,提高患者的行为能力[5]。
目前,骨科功能锻炼主要依靠医师指导与患者自行训练,整个过程缺乏精确性与规范化,很难达到预期效果。本研究分析了市场上现有的膝关节康复锻炼设备,并在本院专家、教授的长期临床治疗经验的指导下,设计了一种关于膝关节主动与被动模式的功能锻炼设备。该设备的主要设计技术思路为:通过减速步进电机、磁粉制动器、电磁离合器、角度传感器及MCU Stm32 芯片等,实现智能化主动与被动模式的功能锻炼,以及模式之间的自由切换与治疗参数的精准设置等功能。
1 膝关节功能锻炼设备的研究与设计
1.1 膝关节功能锻炼设备的理论研究
该膝关节功能锻炼设备通过对患者膝关节进行辅助性锻炼,达到对膝关节及其周围组织肌肉功能治疗的目的,因此在该膝关节功能锻炼设备的设计研究初期,需要确定膝关节功能锻炼的治疗模式及相应的受力、时间、角度范围和角速度等指标,同时对上述指标的控制理论进行分析研究。
1.1.1 膝关节功能的治疗模式及相关参数
当前研究表明,膝关节功能锻炼的体位主要包括坐位锻炼、仰卧位锻炼、俯卧位锻炼和站立位锻炼等,其中站立位锻炼需要患者具有足够的力量与平衡保持能力,不适合膝关节病变较为严重的患者。数据统计分析及对照试验表明,患者膝关节功能锻炼的效果与每日锻炼组数、每组锻炼次数、每次锻炼时长均有密切关系。结合以上试验结论与临床功能锻炼经验的调研,定义该设备的锻炼组数与次数,均可在0~30 次范围内任意设定,单次锻炼保持时长可在3~10 s 内任意设定,膝关节被动锻炼角速度可在0~5 °/s 内任意设定[8-12]。
1.1.2 膝关节功能锻炼动力与阻力的产生
该膝关节功能锻炼设备通过控制驱动器与电磁离合器的工作模式,实现设备输出动力或阻力模式的切换。动力部分由220 V 减速步进电机提供,通过减速步进电机自身减速比与蜗轮、蜗杆实现输出扭矩的放大,提供足够的驱动力;阻力部分由磁粉制动器提供,磁粉制动器产生的阻力扭矩主要取决于输入磁粉制动器的激磁电流的大小。磁粉制动器由传动单元(输入轴)和从动单元(输出轴)合并而成。两组单元之间的空间填有粒状的磁粉(体积大约 40 µm3)。当磁性线圈不导电时,扭矩不会从传动轴传于从动轴,但如将线圈电磁通电,就会因磁力的作用而吸引磁粉产生硬化现象,在连续滑动之间会把扭矩传达。而其扭矩与激磁电流存在线性关系,即可通过调整激磁电流大小改变磁粉制动器输出的扭矩[11]。
膝关节功能锻炼设备的活动摇臂提供阻力的计算公式如下:
式中F为活动摇臂提供给患者的阻力,单位为N;M为磁粉制动器输出的扭矩,单位为N·m;L则为患者踝关节与膝关节的有效距离,单位为m。
1.2 膝关节功能锻炼设备的结构设计
该设备主要由躺椅、脚轮、扶手和控制箱等部件组成。躺椅为设备主体;控制箱位于躺椅的坐垫下方;脚轮分别安装在躺椅底盘的4 个角,实现设备的支撑及自由移动功能;扶手安装在躺椅靠背两侧,既可在患者接受治疗时供其支撑与扶靠,又可方便设备移动时的推拉。
躺椅外观类似于普通座椅,靠背设计为可调节式,支撑角度可以根据患者需求或治疗要求进行调整,必要时可将靠背调整至与坐垫水平,便于仰卧或俯卧体位的治疗需求。活动摇臂的转轴,使其与躺椅坐垫的前端固定,控制、调整活动摇臂与坐垫的夹角并保持该角度。根据不同的治疗需求,亦可以控制活动摇臂进行绕轴运动,并调节其绕轴的角速度、提供的力矩,循环运动次数及活动摇臂的角度保持时间,实现各类简单或复杂的功能锻炼动作。活动摇臂两侧的末端分别设有两个接口,用于安装踝支撑杆或其他种类的固定夹具。
控制箱作为该设备的核心部分,内部装有减速步进电机、蜗轮、蜗杆、电磁离合器、磁粉制动器、同步带轮组、活动摇臂及其他零件。具体实现方法如下:减速步进电机的输出轴安装蜗杆,蜗轮与蜗杆相互啮合,蜗轮内孔装有光轴1;光轴1 的一端通过轴承支座固定在箱体内壁,另一端则固定在电磁离合器的主动轴侧内孔;电磁离合器的从动轴侧内孔安装光轴2,光轴2 通过同步带轮内孔后嵌入磁粉制动器内孔;其余两只同步带轮则分别安装于活动摇臂的转轴和角度测量结构的转轴上;角度测量结构中的同步带轮内孔安装有光轴3,光轴3 的两端均安装于光轴轴承套的内孔,两只光轴轴承套安装于固定支撑板,且能够进行垂直方向的移动,光轴3 的其中一端与角度传感器通过联轴器相连,如图1 所示。
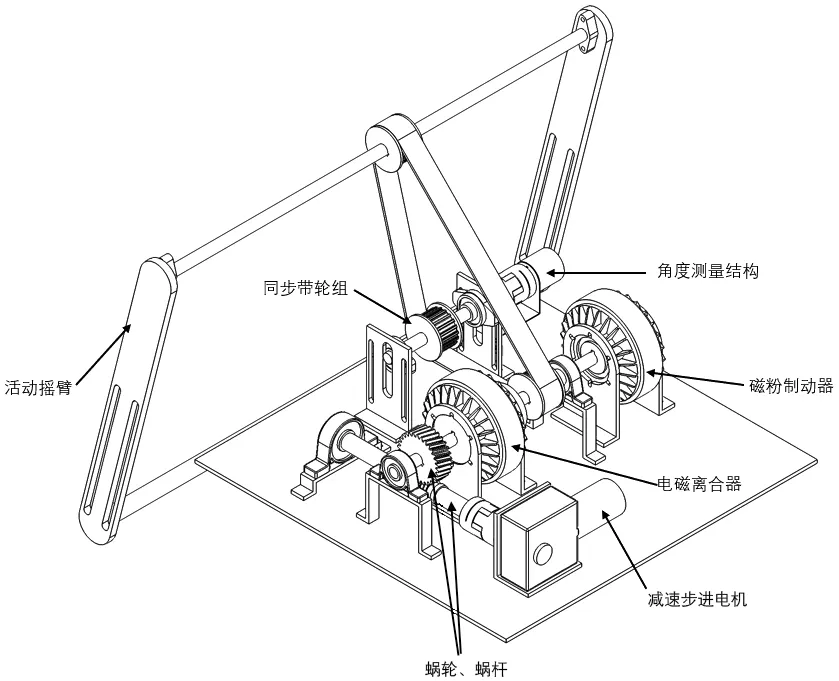
图1 机械结构主要部分示意图
1.3 膝关节功能锻炼设备的控制原理
软件控制主MCU Stm32 芯片通过PWM 端口的脉宽调制输出不同的PWM 波,驱动器通过接收到的PWM 的占空比进行减速步进电机的转速控制。驱动器与减速步进电机之间是转速、电流双闭环的逻辑无环流控制,这就保证了减速步进电机速度控制的精确性和稳定性[12],如图2 所示。

图2 减速步进电机控制图
软件控制主MCU Stm32 芯片的DAC 单元模式输出DAC 信号,DAC 信号控制电流控制单元,电流控制单元通过DAC 电压信号的高低输出不同的电流,以控制磁粉制动器,进而产生不同大小的阻力,如图3 所示。

图3 磁粉制动器控制图
1.4 膝关节功能锻炼设备的主程序控制流程图
该设备的主控程序如图4 所示,其过程控制逻辑如下。(1)开始运行时,主控电路板根据操作者的选择判定电磁离合器是否吸合。(2)若电磁离合器进行吸合,则减速步进电机启动,并正向旋转;同时程序内置计时器启动倒计时;此时角度传感器每间隔0.1 s 都会进行一次角度判定,若判定角度达到所设定的角度值,则驱动器发出反转信号并驱动减速步进电机进行反转,若判定角度未达到所设定角度值,则减速步进电机保持当前运动状态继续运行,直至计时器倒计时完毕,驱动器发出信号结束减速步进电机的运行过程并使其复位。(3)若电磁离合器未吸合,则磁粉制动器得电,主控电路板根据操作者设定的阻力值将其转化为DAC信号,并使电流控制单元控制磁粉制动器即时的输入电流;当活动摇臂被外力驱动时,角度传感器每间隔0.1 s 进行一次角度判定,若判定角度达到设定的角度值,则计时器启动倒计时,并在倒计时结束后使磁粉制动器复位,若判定角度未达到设定的角度值,则计时器不启动,直至活动摇臂被外力驱动至设定的角度。

图4 主程序控制流程图
1.5 设备相关的技术参数
该设备的主要技术参数指标如下:(1)活动摇臂的主动旋转速度调节范围为0 ~5°/s;(2)活动摇臂的旋转活动范围为-90°~150°(设活动摇臂处于水平状态为0°);(3)功能锻炼持续时间调节范围为0 ~99 min;(4)功能锻炼单组运动循环次数调节范围为0 ~30 次;(5)活动摇臂提供的阻力范围为0 ~15 kgf;(6)单次功能锻炼的保持时长调节范围为3 ~10 s。以上所述参数需根据功能锻炼模式与或患者的实际情况自行设定。
2 试验验证
2.1 试验方法
2.1.1 阻力精准度试验
设活动摇臂的初始角度为-90°,通过紧固件将NK-200 型数显式拉压力计安装在踝关节支撑杆上,拉压力计与活动摇臂呈垂直状态,并使用拉压力计对抗活动摇臂的转动,模拟治疗过程,实验设定阻力值为8 kgf,进行5 次循环,保持时长为程序预设定的8 s,通过拉压力计的上位机软件记录功能锻炼过程并生成数据记录。
2.1.2 角度范围与角速度精准度试验
设活动摇臂的初始角度为-90°,并设定终点为0°,进行10 次功能锻炼,活动摇臂的角速度,设定减速电动机的转速使其工作在3°/s,通过读取秒表与上位机软件的数据,记录锻炼过程并生成数据记录。
2.2 试验结果
阻力精准度实验数据如表1 所示,角度范围与角速度精准度实验数据如表2 所示。

表1 8 kgf 的力值与持续时间
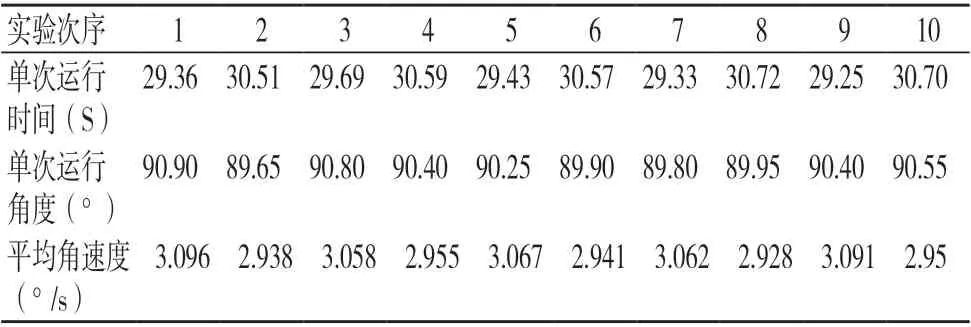
表2 3°/s 的角度行程与运行时间
2.3 试验结论
在阻力精度实验中,力值持续时间都处于相对稳定的水平,单次误差最大为0.1 s,平均误差为0.02 s,单次最大误差百分比为1.25%。在阻力保持时间段内,当设定阻力值为8 kgf 时,真实阻力值的平均值为7.8498 kgf,误差为1.88%,单次最大误差为3%。在角度范围与角速度精准度实验中,当活动摇臂以3°/s 运行时,其真实平均速度为3.009°/s,误差为0.3%;单次最大过冲角度为0.9°,误差为1%。实验结果基本符合设计预期。
3 结语
综上所述,该设备以运动医学、康复医学为理论基础,结合骨科康复临床需求,运用精密机械设计、人工智能自动化控制技术与PWM、PID 等现代控制理论与方法,研制一种集多功能、关节活动度与灵活性训练于一体的智能化膝关节功能锻炼设备,且实现智能化、数字化,显著提高功能锻炼的效果。该项目的实施不但为膝关节骨性关节炎提供一种安全有效且无副作用的绿色治疗手段,而且为功能锻炼疗法的推广应用奠定了基础,还可明显减少医护人员劳动强度、提升工作效率、节省劳动力成本,具有广阔的市场前景,同时可创造更大的社会效益。
猜你喜欢
金属加工(冷加工)(2023年1期)2023-02-04
机电信息(2022年9期)2022-05-07
材料工程(2022年2期)2022-02-26
课程教育研究(2021年23期)2021-04-13
水泥工程(2020年4期)2020-12-18
中国特种设备安全(2019年3期)2019-04-22
汽车实用技术(2016年1期)2016-12-24
原子与分子物理学报(2015年6期)2015-03-22
汽车科技(2015年1期)2015-02-28
汽车零部件(2014年5期)2014-11-11
