
基于摩擦补偿的直流伺服系统变增益自抗扰控制器
2023-02-03 12:18樊卫华
电机与控制应用 2023年1期
冯 宾, 樊卫华
(南京理工大学 自动化学院,江苏 南京 210094)
0 引 言
直流伺服系统作为雷达系统[1]、光电对抗系统[2]、精密数控机床[3]以及机器人系统[4]等的重要核心部件,其性能直接影响上述设备的整体性能。在伺服控制系统中,摩擦非线性是影响其稳态和动态性能的主要因素,可能使系统变得不稳定或者性能大大降低。特别在低速运行下,与中等或稳态速度运行相比,在速度换向时,摩擦非线性对直流伺服系统控制性能的影响占主导地位。在低速跟踪和小阻尼时会引起跟踪误差较高、相位滞后、“滞滑”跳动、爬行和极限环振荡等问题。因此,为了提高直流伺服系统的低速跟踪精度和动态响应性能,需从摩擦补偿和控制器设计两方面同时入手。
为了克服摩擦非线性对直流伺服系统造成的影响,一种直接而有效的方法便是通过建立相对精确的摩擦模型,对存在直流伺服系统中的摩擦进行实时估计并加以补偿[5]。常用的静态摩擦模型有Stribeck模型、Karnopp模型和库伦摩擦模型等。但常用模型不能真实地反映摩擦的动态特性,因此不能获得良好的补偿效果。LuGre摩擦模型采用两个接触面之间的鬃毛形变量来表征摩擦的动态特性,较为准确地描述了摩擦中的爬行、极限环振荡、变静摩擦力和斯特里贝克曲线等动静态特性[6],因此在理论和应用上受到许多学者的研究。目前,基于LuGre模型的控制方法主要有自适应鲁棒控制[7]、滑模变结构控制[8]、基于干扰观测器的补偿控制[9]以及自抗扰控制(ADRC)[10]等。文献[11]利用LuGre模型前馈补偿系统的摩擦,有效地改善了转台伺服系统的低速性能。文献[12]针对机电伺服系统低速阶段存在的摩擦非线性,提出一种基于非线性观测器摩擦补偿的自适应鲁棒控制器。该控制器利用LuGre模型前馈补偿摩擦非线性,并通过设计鲁棒项克服其他扰动,获得了较高的控制精度和较强的鲁棒性。文献[13]利用LuGre模型对光电稳定平台中的摩擦进行补偿,并通过扰动观测器对剩余的干扰进行补偿,实现了系统的高精度跟踪。文献[14]结合修正黏性摩擦 LuGre 模型建立系统的状态方程,根据反演思想设计自适应滑模控制器,提高了系统的跟踪性能。但这些方法很少能在减小摩擦非线性对系统的影响和提高系统跟踪性能的同时,改善系统的动态性能。
由Han[15]提出的ADRC是一种非线性补偿控制方法,通过扩张状态观测器实时估计系统中的总扰动并在控制信号中加以补偿。针对传统的ADRC结构复杂,参数众多且不够直观。文献[16]引入带宽的概念,提出了线性自抗扰控制(LADRC),推动了ADRC在工程领域中的应用。线性扩张状态观测器(LESO)作为LADRC的核心,可以将摩擦视为非线性扰动,对其实时估计并在反馈信号中得到消除,从而抑制摩擦对系统性能的影响。但这要求LESO能够快速、精确地估计出摩擦。为了提高对摩擦的估计能力,LESO就得选取较大的观测器增益,但受实际系统的带宽、量测噪声、采样时间等因素制约,观测器的增益是受限的[17]。同时,常值高增益LESO由于初始时刻状态变量的估计值与系统中对应的真实值存在较大误差,会使LESO估计的扰动在初始时刻产生较大峰值,即存在初始峰值问题[18]。当这样一个异常扰动直接补偿到控制器中,则会非常容易降低系统的动态性能。
综上,针对摩擦非线性影响直流伺服系统跟踪精度以及现有的控制方法不能改善系统动态性能的问题,本文提出一种基于LuGre模型前馈补偿的变增益自抗扰控制(VGADRC)方法。设计摩擦补偿与ADRC相结合的复合控制器,通过LuGre模型对摩擦进行前馈补偿,针对加入摩擦补偿后的系统,可能出现摩擦补偿过度或不足的现象,引入ADRC对其补偿,以提高系统的跟踪精度。此外,为抑制LESO在初始时刻产生的峰值现象,设计一种变增益线性扩张状态观测器(VGLESO),以提高系统的动态性能。最后,通过仿真验证所提控制方案在直流伺服系统中的有效性。
1 含摩擦的直流伺服系统数学模型
设直流伺服系统组成如图1所示,由控制器、功率放大器和直流电机组成。控制器根据角位置偏差计算得到控制量,控制量经过功率放大器放大后驱动直流电机转子转动。
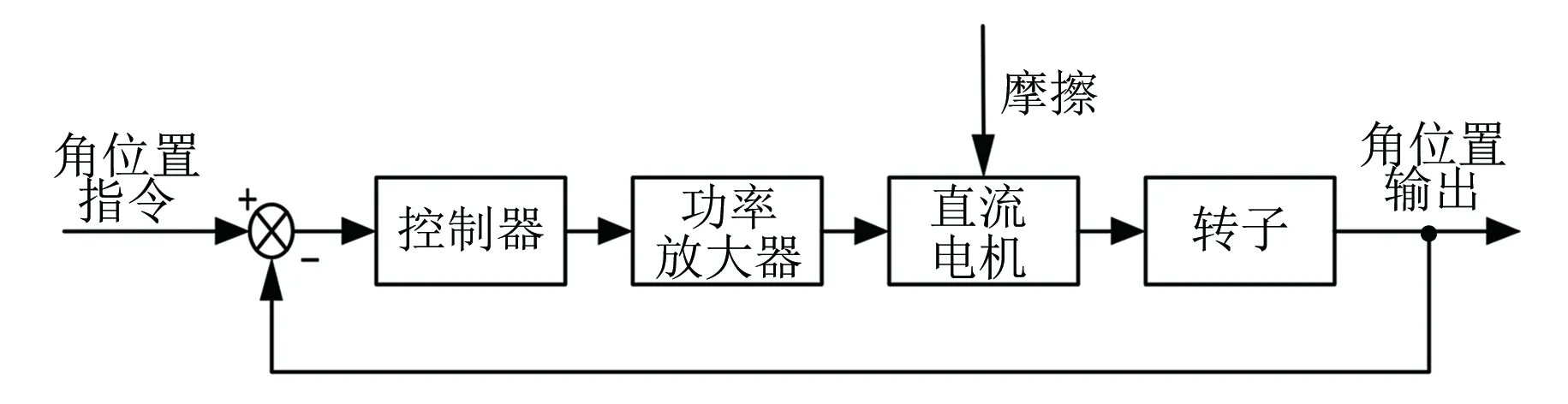
图1 直流伺服系统组成结构图
因摩擦非线性是影响直流伺服系统低速性能的主要因素,故忽略其他非线性扰动,仅考虑摩擦非线性,简化后的直流伺服系统数学模型如图2所示。
图2中,u为控制输入;kp为功率放大增益;U为放大后的控制电压;ke为反电动势常数;L为电机的电枢电感;i为电机的电枢电流;R为电机的电枢电阻;km为电机转矩常数;Mf为摩擦力矩;J为电机的转动惯量;θ为电机的输出角度。
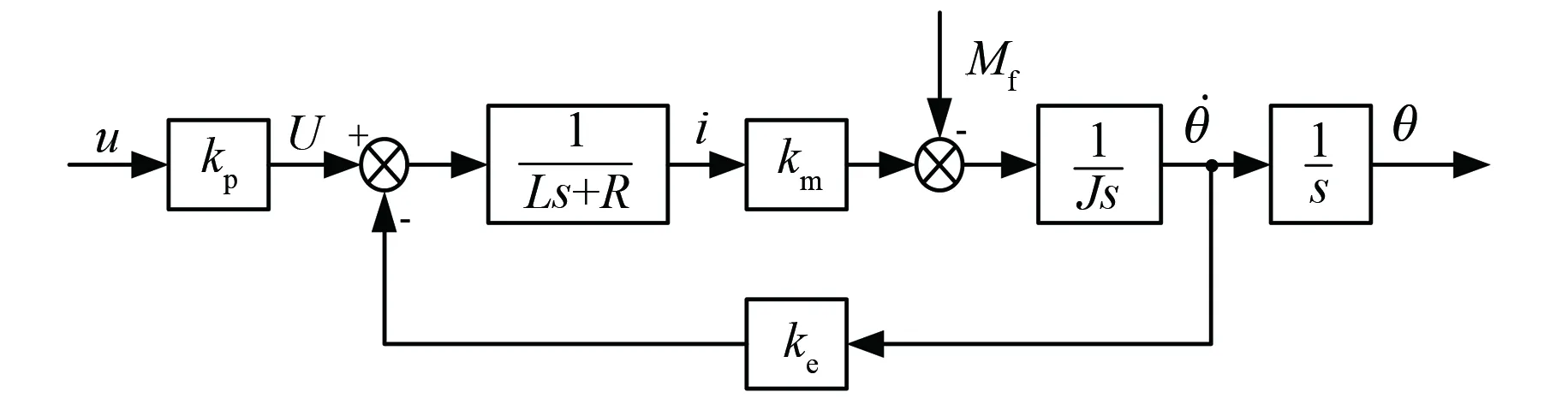
图2 含摩擦非线性的直流伺服系统结构图
根据直流伺服系统工作原理,由图2可得电压平衡方程和转矩方程:
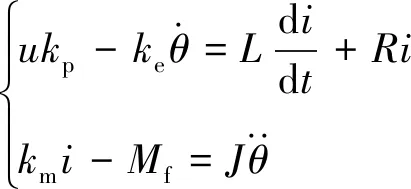
(1)

由于电机的电感很小。可以忽略,故式(1)可简化为
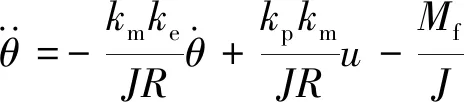
(2)

(3)
LuGre模型描述如下:
(4)
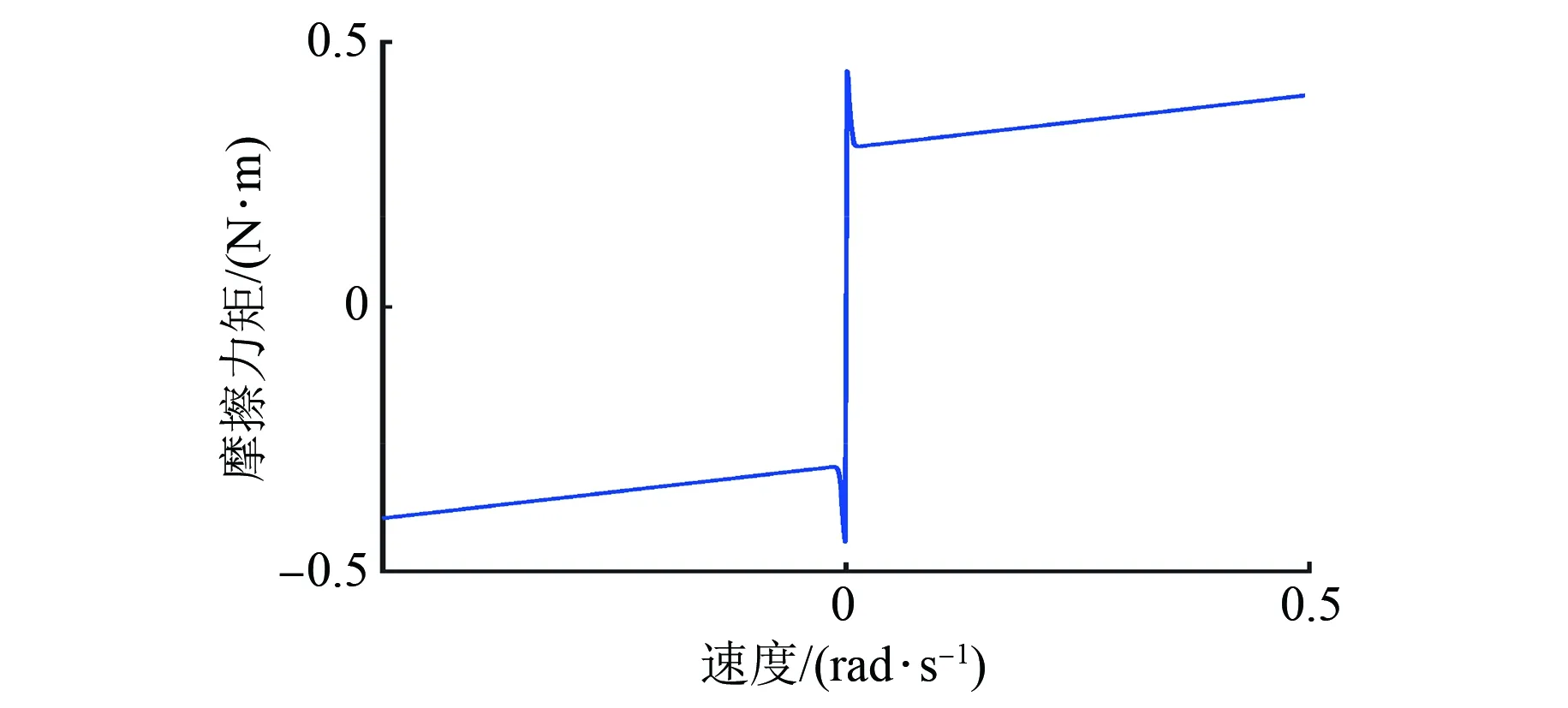
图3 Stribeck摩擦曲线
由图3可知,系统在低速运行时,摩擦力矩具有以下两点特性:(1)摩擦力矩从静摩擦力矩到库伦摩擦力矩的快速转变,使得摩擦力矩具有负斜率特性;(2)系统在速度方向切换时,摩擦力矩具有不连续性。负斜率特性和不连续性所带来的爬行现象会大大降低系统的低速性能。因此,本文目的是设计控制器以补偿系统中的摩擦力矩。
2 VGADRC设计
针对包含了摩擦非线性环节的直流伺服系统,常规的控制方法难以达到较高的控制精度,且系统响应时间长,为此设计ADRC。本文设计的基于摩擦补偿的直流伺服系统VGADRC结构图如图4所示,该控制器是一种由前馈补偿控制与ADRC相结合的复合控制器,主要包含LuGre模型、线性跟踪微分器(LTD)、VGLESO和线性状态误差反馈控制律(LSEF)四个部分。其中,LuGre模型用来前馈补偿系统中的摩擦非线性,LTD用来跟踪角位置指令并给出跟踪过程的近似微分信号,VGLESO用来对系统的状态和系统中的总扰动进行估计,LSEF用来对VGLESO估计的总扰动进行补偿。
下面分别介绍LTD、VGLESO和LSEF 3部分的设计。
2.1 LTD
通过LuGre模型来补偿系统中的摩擦非线性,可看作将LuGre模型输出的摩擦力矩,利用系数变换施加到控制输入端,即可补偿摩擦对系统的影响[20]。对应图4,经过系数变换后的摩擦补偿力矩Ffc为
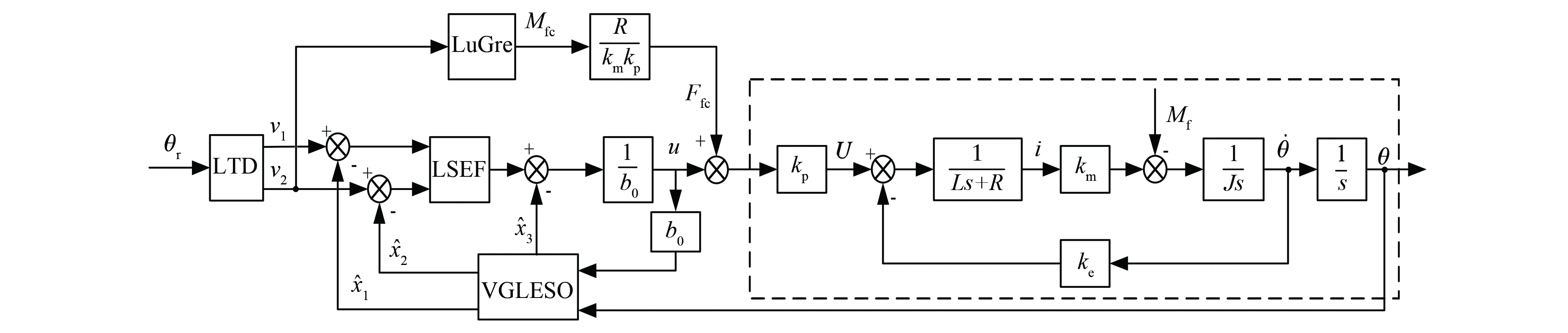
图4 基于摩擦补偿的直流伺服系统VGADRC结构图
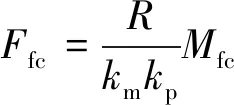
(5)
式中:Mfc为摩擦补偿力矩。
对直流伺服系统进行位置控制时,由于期望信号为位置信号,而LuGre模型的输入信号为速度信号,为避免对给定位置信号进行微分引入噪声,采用二阶跟踪微分器(TD)为指令信号安排过渡过程[21]。
对于传统的TD,由于采用的是非线性函数, 不仅编程复杂且计算量大,为便于系统设计,将TD线性化,描述如下[22]:
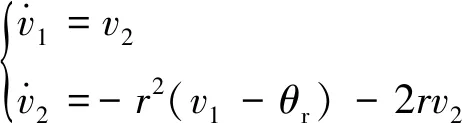
(6)
式中:θr为期望的位置信号;v1为安排过渡过程后的位置信号;v2为位置信号θr的近似微分信号;r为跟踪因子。
2.2 VGLESO
对于固定摩擦参数的LuGre模型,在实际工况条件下,当系统的摩擦参数发生改变时,LuGre模型所补偿的摩擦力矩会与实际的摩擦力矩产生差异,导致摩擦过补偿或欠补偿的情况发生。为了对残余摩擦扰动进行抑制,采用LESO对其估计和补偿。针对LESO初始时刻估计值与真实值不一致所引起的峰值现象,一种三阶VGLESO设计如下。
对系统加入摩擦补偿力矩Mfc后,则式(2)可改写为

(7)
则式(7)可表示为

(8)

则式(8)的扩张状态方程可表示为

(9)
建立式(9)的扩张状态观测器为

(10)


(11)
式中:e1、e2、e3分别为状态x1、x2、x3的观测估计误差。
将式(11)写成矩阵的形式为

(12)


(13)

引理若式(12)和式(13)是完全可控的,则存在非奇异线性变换z=P(t)e,使得式(12)与式(13)是等价的[23]。
定义式(12)的可控性矩阵为

(14)
式中:M0(t)、M1(t)、M2(t)均为列向量。
由可控性矩阵有:
(15)
则式(14)可重写为
(16)
同理,定义式(13)的可控性矩阵为Mc(t)。由式(14)~式(15)可得,Mc(t)可表示为
(17)
由式(16)~式(17)可知,式(12)~式(13)是完全可控的。故由引理可得,存在非奇异线性变换z=P(t)e,变换矩阵P(t)可表示为
P(t)=Mc(t)M-1(t)
(18)
使得式(12)与式(13)是等价的。
将z=P(t)e代入式(11)和式(12)可得:

(19)
则由式(18)~式(19)可得,观测器的时变增益l1(t)、l2(t)和l3(t)可由a1(t)、a2(t)、a3(t)及其导数表示为
(20)
为了设计a1(t)、a2(t)和a3(t),本文采用微分算子谱理论,通过分配合适的并行微分根ρi(t)以得到a1(t)、a2(t)和a3(t)并确保VGLESO的稳定性和估计误差有界。
令式(12)的特征根为

(21)

选取LESO中的特征根为
(22)
式中:ωo为观测器增益,ωo>0,确保LESO的稳定。
根据微分算子谱理论,变增益参数a1(t)、a2(t)和a3(t)选取以下形式[24]:
(23)
定义ωn(t)=ωoω(t),则由式(22)~式(23)可得:
(24)
则式(20)可重写为
(25)
至此,l1(t)、l2(t)和l3(t)的设计问题最终转化为ωn(t)=ωoω(t)中ω(t)的设计问题。本文选取时变函数ω(t)为
(26)
式中:k为指数因子,是正常数。
式(26)可以使ωn(t)在初始阶段为一较小的值,然后迅速增大到常值ωo, 从而削弱初始阶段产生的峰值现象。
注2ωn(t)=ωoω(t)中观测器增益ωo的取值一般需根据性能指标、实际系统带宽与量测噪声之间综合考虑。时变函数ω(t)中指数因子k取值越大,观测器增益增大到常值ωo的速度越快,对状态及扰动的估计越快,但峰值抑制能力越弱。经过仿真调试,本文k值取为50。
2.3 LSEF
VGLESO可实时估计出系统的总扰动,并通过反馈控制律进行补偿,方程如下:

(27)
式中:kp为比例系数;kd为微分系数。
增大kp可以加快系统的响应速度,但过大会引起系统振荡;过小的kd会使系统不稳定,产生振荡发散[25]。
注3 通常情况下,先将kp选取为一个较大值,kd选取为一个较小值,然后根据性能指标依次调整kp和kd。
3 仿真验证
为了验证所提摩擦补偿方案和VGADRC设计的有效性,在MATLAB/Simulink中建立直流伺服系统仿真模型进行仿真研究,仿真中所使用的直流伺服系统模型参数为,m=0.49,a=-1.41。
3.1 低速跟踪仿真
为了模拟实际应用中因摩擦参数发生变化,前馈补偿不准的情况,将式(5)中经过系数变换后的摩擦补偿力矩Ffc在仿真中取为0.90Ffc,并在系统输出端添加方差为0.000 1%的高斯白噪声,以验证欠补偿和摩擦计算值不准时使用所提方法的有效性。
给定位置指令为θr=0.1sin(0.2πt) rad,采用未加摩擦补偿且观测器增益ωo=100,未加摩擦补偿且观测器增益ωo=300,增加摩擦补偿且观测器增益ωo=100三种控制方式比较低速跟踪性能。三种方式均采用VGLESO,其三种控制方式的控制器参数除了观测器增益不同外均为kp=2 500,kd=200,b0=2,r=50。三种控制方式的低速跟踪仿真曲线如图5和图6所示。其位置跟踪误差峰值和速度跟踪误差峰值如表1所示。
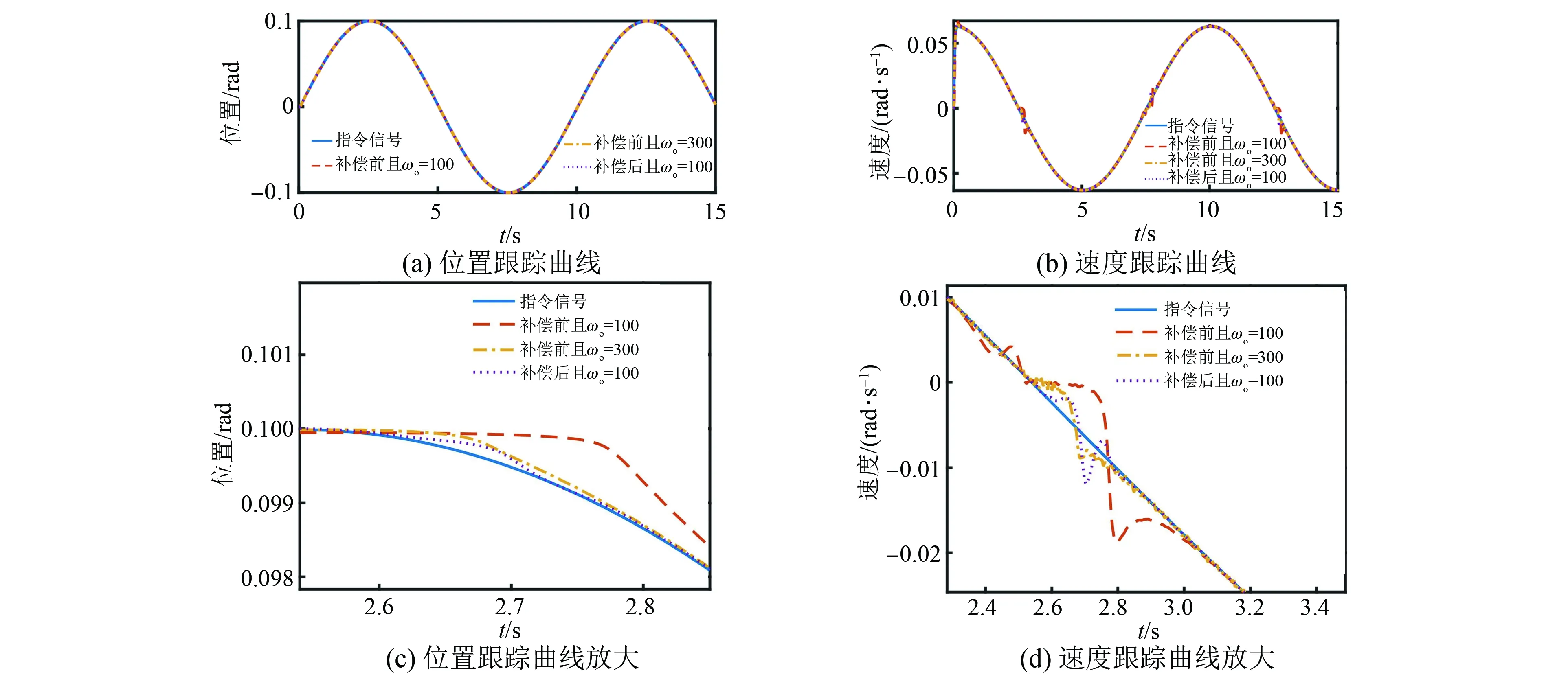
图5 低速跟踪曲线
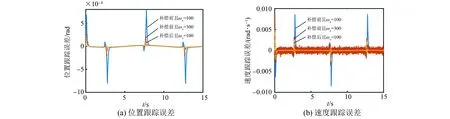
图6 低速跟踪误差
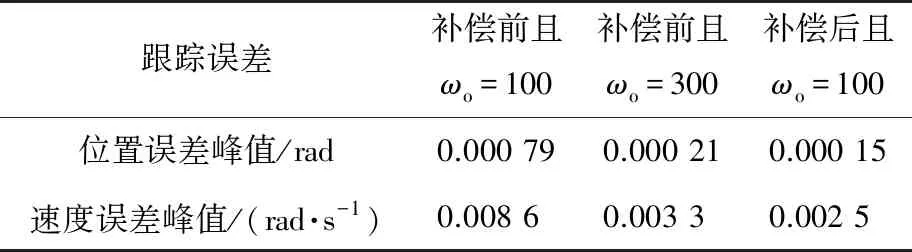
表1 不同方式下的跟踪误差峰值比较
由图5可以看出,若未对摩擦进行补偿,系统在速度换向时,位置跟踪曲线和速度跟踪曲线分别出现“平顶”现象和“死区”现象。增大观测器增益ωo虽然可以使观测器更加快速和准确的估计摩擦扰动,从而减弱摩擦对系统的影响,但同时也放大了量测噪声,使得速度信号受到严重污染。而加入摩擦补偿后的系统,在不增大观测器增益且系统中存在欠补偿以及量测噪声的前提下,仍可以有效减弱摩擦带来的不良影响。
由图6(a)和图6(b)可得,位置跟踪误差和速度跟踪误差均存在一个较大的峰值,该峰值正是系统在换向时摩擦非线性所引起的位置平顶和速度死区所导致的。分析表1可得,采用摩擦补偿后的系统,其位置跟踪误差不超过0.000 15 rad,速度跟踪误差不超过0.002 5 rad/s,说明所设计的摩擦补偿方案能够有效降低系统的位置和速度跟踪误差,提高系统的低速跟踪精度。
为了验证所提VGLESO能较好地抑制初始时刻的峰值现象,对摩擦补偿过后的系统分别采用LESO和VGLESO进行控制,其控制器参数均为kp=2 500,kd=200,ωo=100,b0=2,r=50。两种控制方式下的低速跟踪误差曲线如图7所示。
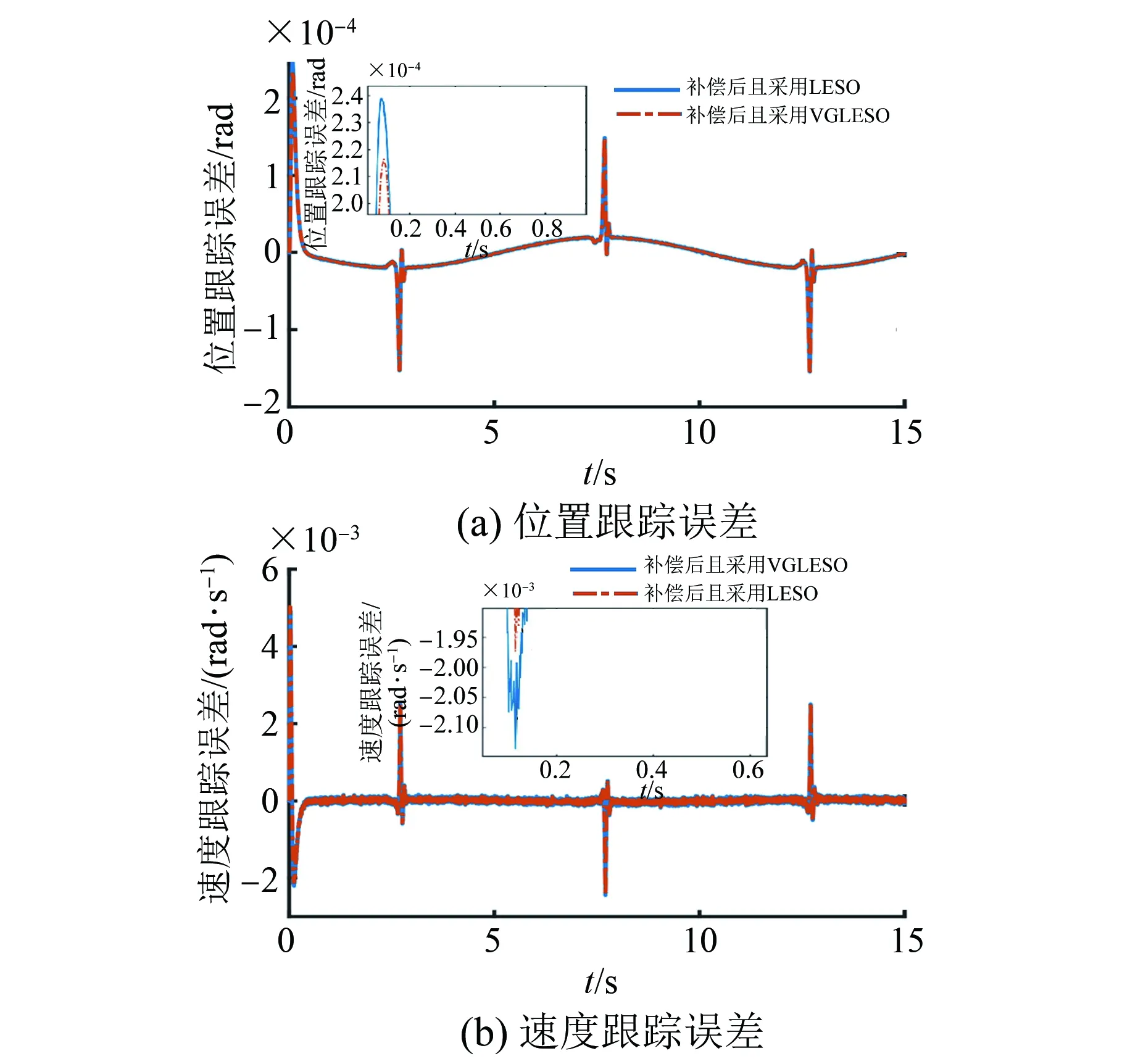
图7 补偿后低速跟踪误差
由图7摩擦补偿后系统低速跟踪误差曲线可知,与LESO相比,采用VGLESO的控制器由于削弱了初始阶段的峰值现象,其初始时刻的位置跟踪误差和速度跟踪误差均有所减少。
3.2 暂态响应仿真

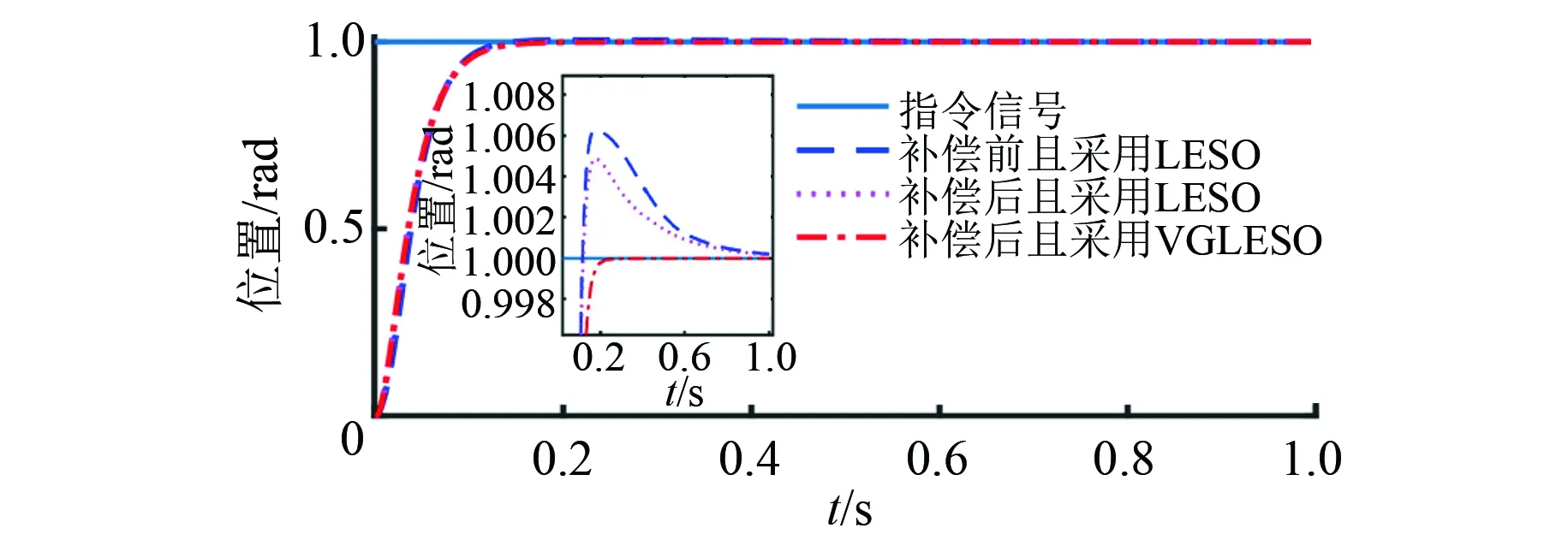
图8 位置阶跃响应
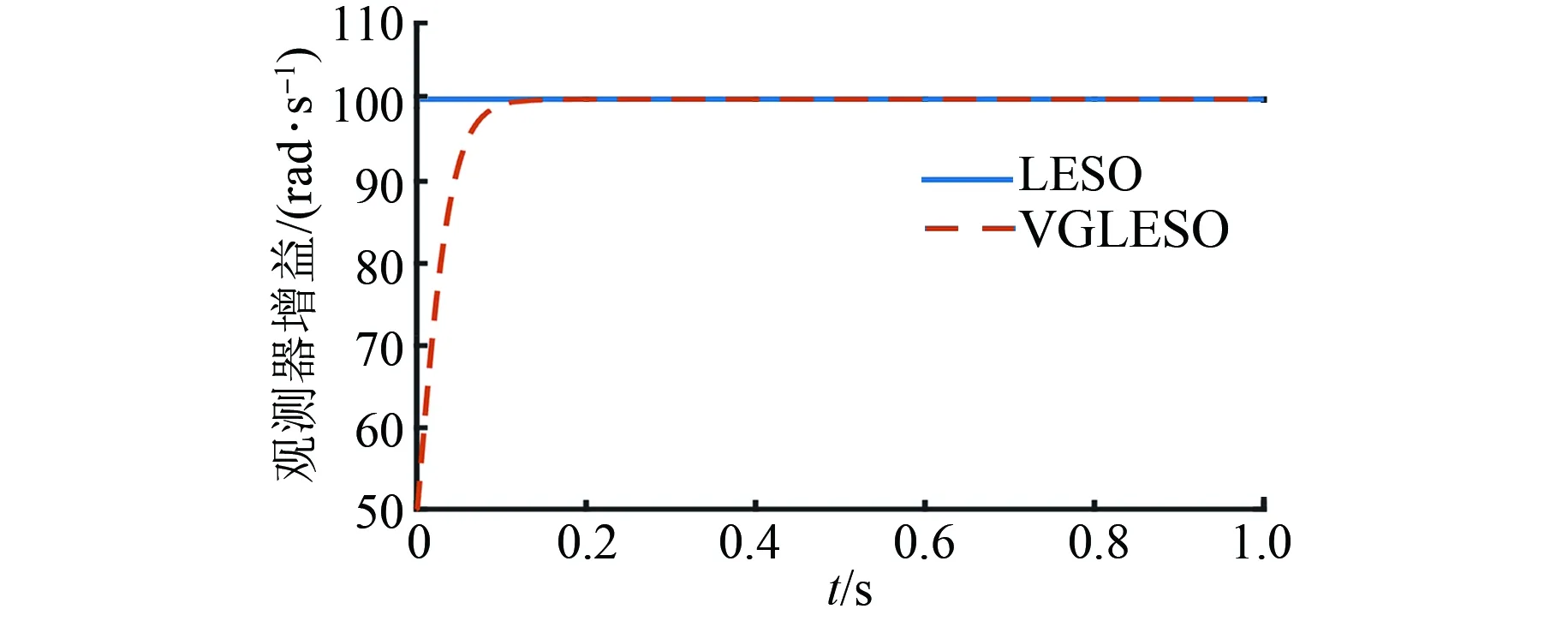
图9 观测器增益变化
由图8和图9可知,无摩擦补偿且采用LESO控制方式下的阶跃响应超调量为0.006 27 rad,有摩擦补偿且采用LESO控制方式的超调量为0.004 82 rad,而有摩擦补偿且采用VGLESO方式下的阶跃响应无超调;采用LESO方式的控制器在1 s时仍未达到稳态值1 rad,而采用VGLESO方式的控制器在0.3 s时就达到稳态值1 rad。这是因为LESO在初始阶段的观测器增益为一较大的常值ωo,从而使系统出现了初始峰值。VGLESO在初始阶段选择了较小的观测器增益,然后迅速增大至常值ωo,所以较好地抑制了这一现象,改善了系统的动态性能。
4 结 语
为了抑制摩擦非线性对直流伺服系统控制性能的影响,本文设计了一种基于LuGre模型前馈补偿的VGADRC,在不增大观测器增益的前提下,利用LuGre模型对系统低速区的摩擦非线性进行补偿,减弱了低速跟踪时产生的“平顶”和“死区”现象。同时,本文设计的VGLESO,有效地抑制了传统观测器存在的初始峰值问题,提高了系统的动态性能。仿真结果表明,直流伺服系统的低速跟踪精度明显提高,位置阶跃响应快速无超调,验证了所提控制方案的有效性。
猜你喜欢
北京航空航天大学学报(2022年6期)2022-07-02
北京航空航天大学学报(2021年6期)2021-07-20
防爆电机(2020年4期)2020-12-14
北京航空航天大学学报(2020年10期)2020-11-14
电子制作(2019年19期)2019-11-23
电子制作(2018年19期)2018-11-14
北京航空航天大学学报(2017年6期)2017-11-23
制造技术与机床(2017年3期)2017-06-23
电子制作(2016年1期)2016-11-07
北京航空航天大学学报(2016年4期)2016-02-27
