面向降雨环境的激光雷达衰减模型研究*
2023-01-31 02:09:52郭鹏飞张希黄永晖朱旺旺江琪
汽车技术 2023年1期
郭鹏飞 张希 黄永晖 朱旺旺 江琪
(上海交通大学,上海 200240)
主题词:自动驾驶 激光雷达 降雨环境 点云仿真 衰减模型
1 前言
激光雷达(Light Detection And Ranging,LiDAR)是自动驾驶系统的重要传感器之一[1],能够在夜晚、隧道等低能见度环境下保持良好的感知能力,但其对空气中分布的微粒较为敏感,因此在降雨环境中,检测效果会大幅下降[2],存在噪点引入、目标物检测点云强度下降、可探测距离缩短等问题,严重制约了自动驾驶设计运行域(Operation Design Domain,ODD)的扩展。
针对此问题,需要对激光雷达进行建模仿真,实现激光雷达在降雨环境下运行情况的模拟,进而分析降雨环境对激光雷达感知系统的衰减影响。文献[3]提出了基于统计方法的点云衰减模型,其根据文献[4]的试验统计结果,拟合得到了点云强度衰减比例与传播距离之间的函数关系,并将低于强度阈值的点云移除,获得衰减点云。文献[5]从光学传播过程分析了降雨过程对激光传播的衰减作用并推导出了强度衰减系数与降雨强度之间的关系。文献[6]分析了衰减效率因子随散射微粒尺寸的变化特征,同时仿真分析了散射光强空间分布规律。文献[7]使用光线追踪技术,实时计算激光传播过程中的光强损失。文献[8]使用蒙特卡罗方法计算激光传播过程与雨滴粒子的光学作用关系,并通过试验验证了方法的合理性。文献[9]应用了文献[5]中的光强衰减公式,并分析考虑了椭球形雨滴轴比对光强的具体影响。文献[10]使用椭球形雨滴轴比简化了激光雷达衰减公式,并使用理论激光模型验证了衰减对障碍物探测概率的影响。文献[11]、文献[12]将噪点产生独立为雨滴位于激光光束内与雨滴发射强度达到阈值2 个独立事件,对随机分布粒子进行条件判断,从而产生空间噪点。以上方法大多通过统计公式或光学传播公式计算分析降雨过程对光强衰减的影响,缺少对噪点产生原理的分析与实质体现,无法完全展现激光雷达所受的衰减影响,同时,以上方法大多为固定输出,无法展示降雨过程的随机性与不确定性。
对此,本文提出面向降雨环境的激光雷达衰减模型,根据雨滴尺寸分布模型分析降雨量对激光衰减的影响,并引入雨滴后向散射模型分析激光路径中的雨滴反射对距离计算的影响,以得到光强衰减以及噪点产生情况,进而获取此环境下的点云数据。
2 激光雷达系统衰减模型建立
2.1 激光雷达模型
现阶段车载激光雷达主要使用飞行时间(Time of Flight,ToF)方法实现对特定方向障碍物的距离探测,由激光发射器发出特定波长与能量的激光,激光在障碍物表面发生反射后由接收器捕获,根据发出和接收的时间差分析得到与障碍物间的距离,进一步根据发射时的方位和接收强度确定障碍物的具体位置与回波强度,探测距离s为:

式中,c为光速;t为从发射到接收所用的时间。
激光雷达通过在不同的水平角度和俯仰角度进行探测,获得对整个空间的感知能力,其水平角度为θ=(θ1,θ2,…,θhori),俯仰角度为ω=(ω1,ω2,…,ωvert),对于水平角度为θi、俯仰角度为ωj、探测距离为s的点云,其在笛卡尔坐标系下的坐标为:
激光雷达在探测距离为s的障碍物时,其回波强度表示为[13]:

式中,Er(s)为激光雷达接收功率;El为发生器发出的激光强度;ρ(s)为障碍物的后向散射系数;Ar为接收器有效面积;τT、τR分别为激光发射器效率与接收器效率;α(f)为光线传播路径中距离激光雷达f处的介质散射系数。
考虑传播介质均一且散射系数为α,令K=ElcτTτRAr,则式(3)可化为:
对于给定型号的激光雷达,可以获取其最大探测距离sh及对应的反射率ρh、激光雷达感受阈值Pmin,则常数K可表示为:

现阶段激光雷达通常有2种工作模式:最强回波模式以及最后回波模式。激光发射后可能产生多次激光反射,最强回波模式返回最强的反射回波值,最后回波模式返回最后接收的有效回波值,本文衰减模型选取最强回波模式进行分析。
2.2 雨滴尺寸分布模型
在降雨过程中,雨滴的分布数量、尺寸、形状等因素均会影响激光在传播过程中的衰减情况,目前应用较为普遍的雨滴尺寸分布模型包括Mashall-Palmer(M-P)模型[14]:

式中,N(D)为单位体积内尺寸为D的雨滴数量;N0=8 000 mm-1·m-3;Λ=4.1R-0.21mm-1;R为降雨量。
该雨滴尺寸分布符合指数分布。M-P 模型公式结构简单,但对于小尺寸区域数量估计误差较大。
对此,Feingold 和Levin 等人提出了更为精细的Feingold-Levin(F-L)模型[15]:

式中,NT=172R0.22为单位体积内雨滴总数;Dg=0.72R0.23为雨滴的几何平均尺寸;σ为D的标准几何偏差,其关于降雨量R的经验公式为:

根据式(6)、式(7)可以获得不同雨量条件下的雨滴尺寸分布情况,如图1所示。

图1 不同降雨量下的雨滴尺寸分布模型
比较M-P 模型与F-L 模型,对于较小尺寸(D<1.5 mm)雨滴数量,M-P模型分布数量远大于F-L模型,在中、大尺寸(D≥1.5 mm)区域,2种模型差别较小。
2.3 粒子散射模型
激光雷达发射的激光在传播途中会受空气中的粒子作用发生散射现象,造成能量的损失,如图2所示,其中,Pr、Pt分别为接收功率和入射功率。
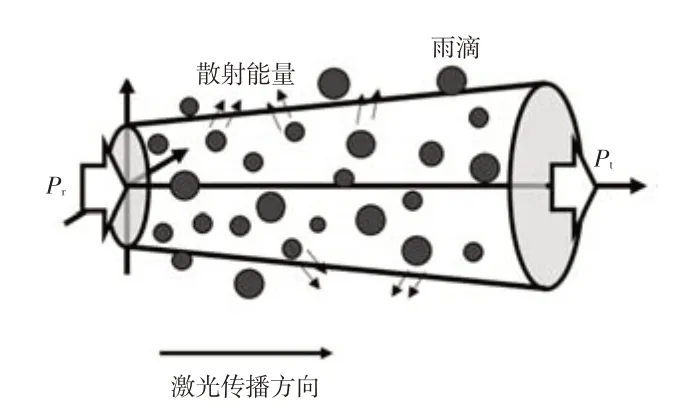
图2 激光传播过程中受雨滴散射示意
激光波长为905 nm,雨滴尺寸集中于1~5 mm 范围,其尺寸系数3 471≤ε≤17 356。当激光与雨滴相碰撞时,属于Mie散射适用范围[16]。
Mie散射发生于粒子尺寸与波长相接近时,这时的能量损失由散射能量损失和吸收能量损失组成。将散射或吸收的能量与入射能量密度的比值定义为散射截面积Csca和吸收截面积Cabs,二者之和为衰减截面积Cext:

散射、吸收、衰减截面积与粒子自身截面积的比值即可定义为无量纲的散射效率因子Qsca、吸收效率因子Qabs、消光效率因子Qext:

式中,r为粒子半径。
图3展示了不同尺寸系数下的散射效率因子、吸收效率因子和消光效率因子的变化情况。
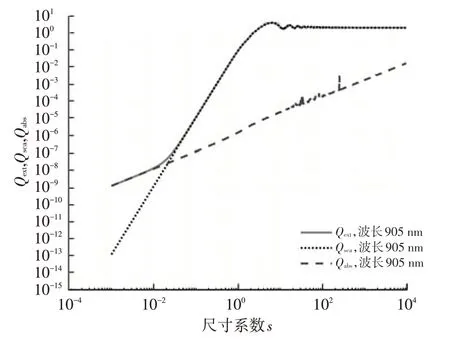
图3 基于Mie散射过程仿真[17]的衰减、散射与消光效率因子随尺寸系数变化关系
在雨滴尺寸系数区域,Qext≈Qsca,即绝大部分能量衰减由散射过程产生,因此可以将衰减系数因子近似处理为散射系数因子,假定粒子为球形且各向同性,由边界条件可求解得到衰减系数因子:

式中,ak、bk为Mie系数,其取决于尺寸系数ε;kmax为最大迭代计算次数。
当激光在均匀粒子分布的介质中传播时,其能量衰减符合Beer-Lambert定律[18]:

式中,γext为消光系数;L为传播距离。
消光系数在同一尺寸为D的粒子中可表示为:

考虑粒子尺寸存在差异,因此需要对不同尺寸粒子进行积分处理,最终可获得消光系数的表达式为:

2.4 粒子噪点模型
当激光与粒子发生碰撞时,粒子同时也会作为被观测物向接收器返回一定光强的激光,对于同一束发射的激光而言,当其与粒子发生碰撞后反射的激光强度大于激光雷达的感受阈值,同时真实障碍物返回强度小于粒子反射强度时,激光雷达会将粒子处的回波认定为该方向的障碍物回波,进而产生噪声点云,对于直径为Drain的雨滴粒子,由式(4)可计算获得其回波功率βr为:

式中,ρrain为雨滴的平均反光系数;v为粒子与激光雷达的距离。
当激光雷达接收功率为P的回波时,其可被检测并呈现为点云的条件为:

3 衰减模型算法搭建
本文建立的衰减模型以正常条件下的激光雷达点云作为输入,通过人为设定环境参数,以前述模型为算法基础,输出得到对应环境下的点云。降雨对激光雷达的衰减效果具体表现为点云强度下降、目标物扫描点数减少、噪点增加等。
3.1 雨滴位置与尺寸随机生成
雨滴在空间内服从均匀分布,因此可以在直角坐标系下对仿真空间内x、y、z分别均匀取样,生成数量为V×NT的空间位置,其中V为仿真空间体积。考虑激光雷达发射的激光波束为底面积为Alaser、高为L的圆柱体,对于无点云返回的激光,选取L为激光雷达的最大探测距离。通过对所有雨滴的几何计算,即可判断获得位于激光波束空间内的雨滴位置信息。
雨滴尺寸服从F-L模型,使用蒙特卡罗方法生成符合预期尺寸的随机数,具体算法流程如下:
a.从采样范围[0,10]中选取随机采样点xi。
b.计算采样点xi的接受概率:

式中,q(xi)为均匀分布函数;N(xi)为式(7)的尺寸分布函数;M为使得Mq(xi)>N(xi)成立的定值。
c.从[0,1]均匀分布中获得随机数l,当η≥l时,将xi添加至取样结果,否则拒绝该值,返回步骤a,直至取样数量满足需求。
该方法生成的尺寸与模型公式比较如图4所示。

图4 R=20 mm/h情况下蒙特卡罗方法随机生成尺寸模型与F-L理论尺寸分布函数比较
3.2 衰减模型算法流程
结合上述理论模型与随机算法,降雨环境下的激光雷达衰减模型算法如下:
a.由降雨量R使用式(7)计算雨滴尺寸分布模型,应用3.1节中算法随机生成符合分布模型的尺寸数据。在仿真空间中均匀生成V×NT个位置即为雨滴的空间位置,并将生成的尺寸数据随机分配至雨滴以获得完整的雨滴分布信息。
b.在激光雷达扫描角度θ、ω中分别对θ、ω进行遍历,在激光雷达点云Pc中寻找对应角度的点云,若找到对应点Pci,说明该方向激光投射到了障碍物并存在有效回波,其功率为Pt,根据式(12)、式(14)计算在降雨环境下的回波功率Pr,若未找到对应点云,则说明该波束无有效回波,即Pr=0。
c.在步骤a已生成的雨滴中搜索位于激光波束内的雨滴,其中激光波束空间范围为以激光传播方向为轴线、底面积为Alaser、高为L的圆柱体,记录获得空间内的雨滴位置及其尺寸。
d.对于最强回波模式的激光雷达,由式(15)计算出最大噪点反射功率βr:若存在已有点云,则将点云的衰减后的功率Pr与噪点反射功率βr进行比较,选取最大功率P及其对应位置;若不存在点云,则直接选取最大功率为噪点反射功率;若不存在点云且未发生反射,则该方向无点云输出,之后将最大功率P与激光雷达的感受阈值Pmin进行比较,若超过,则最终衰减点云中存在该点,且回波功率为P,反之则该方向不存在点云。
e.将处理后的点云作为仿真结果输出。
通过以上算法流程,可根据降雨量和正常点云输入计算得到降雨环境中的衰减点云输出,进而可进行模型验证与分析。
4 试验验证与分析
为了验证衰减模型与实际场景的相近程度,本文设计并开展了实际测试,通过在噪点数量、选定区域点云数量、区域内平均强度下降等指标进行比较,实现仿真结果的量化比较。
4.1 试验设备
试验使用速腾聚创M1 激光雷达,该激光雷达采用微机电系统(Micro Electro Mechanical System,MEMS)技术,其外观如图5所示,具体参数如表1所示。
表1 速腾聚创M1激光雷达产品规格

图5 速腾聚创M1激光雷达外观
4.2 试验场景
选取一开阔平整区域,如图6所示,激光雷达置于车顶,保持传感器静止,记录从天气正常至降雨全过程的点云数据,在降雨过程中使用量雨器实时测量降雨量。

图6 降雨环境下试验场景
以正常天气下的点云数据为仿真数据输入,如图7所示。根据测量所得的降雨量进行不同时刻的点云仿真,并与对应的实际点云进行比较,以此评价模型的仿真效果。

图7 正常天气下实测点云数据
4.3 仿真评价标准
a.噪点数量。雨滴在空间中可能引发反射被激光雷达识别为有效点云,从而产生噪点,影响实际识别的质量,因此需要关注点云中的噪点数量,在计算过程中,使用K最邻近(K-Nearest Neighbor,KNN)算法,设定搜索半径rsearch=0.1 m,半径内数量阈值Noutlier=4,以此为标准检索空间内的离群点云数量,即引入的噪点数量。
b.选定区域内平均强度与区域点云数量。降雨过程对回波产生衰减效果,进而影响点云强度,部分反射波由于强度过低将被激光雷达自身忽略,导致目标障碍物有效点云数量减少,因此本文选取了试验环境中2个有效障碍物作为探测区域(见图7中障碍物1、障碍物2),分别为表面平整光滑的墙壁和表面不平整的雕像。
计算障碍物所处包围盒空间内的所有点云,统计其平均强度和数量,以此表现降雨对探测障碍物过程的影响。
4.4 仿真结果与对比分析
试验采集了多个时刻的降雨量与点云数据,将正常天气下的点云输入衰减模型并运用3.2节中算法获取对应降雨量下的输出点云,本文分别选取了环境降雨量R为5.7 mm/h、11.6 mm/h、18.9 mm/h、25.7 mm/h 的场景进行可视化展示,如图8所示。

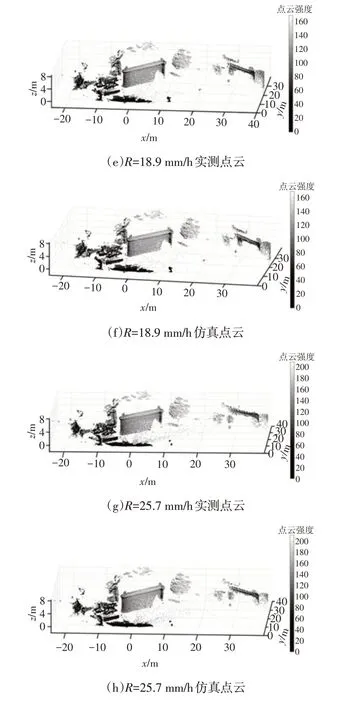
图8 不同降雨量下的测量点云与仿真点云对比
综合不同降雨量下的测量点云和仿真点云图像,均表现出了随降雨量增大,空间噪点增多、目标点数量下降、点云强度下降的趋势,符合理论模型的预期。为进一步验证仿真模型的仿真效果,根据4.3节提出的评价标准进行统计评价,结果如图9~图11所示。
图9表明,降雨量提高,空间中噪点数量随之上升,由式(9)可知,单位体积内雨滴数量会随之增长,提高了激光与雨滴粒子的碰撞概率,当降雨量由5.7 mm/h提升至25.7 mm/h 时,空间噪点数量提升了740%。由式(7)计算表明,雨滴尺寸会随之增加,由目标物反射的激光强度会进一步降低,同时由雨滴引入的反射强度增强,更易被接收器识别为障碍物反射位置,从而引入更多的噪点。由图10、图11 可知,降雨量提高,障碍物所反射得到的点云数量显著减少,且平均强度显著下降,当降雨量由5.7 mm/h 提升至25.7 mm/h 时,障碍物1 点云数量下降了1.7%,平均强度下降了70.3%,障碍物2点云数量下降了89%,平均强度下降了74.5%。上述变化关系体现了降雨过程对激光雷达障碍物检测的影响,在同等场景下,降雨环境中的有效点云数量更少、强度更低,检测算法难以提取障碍物的特征,造成漏检,同时引入的噪点可能会被误识别为障碍物,造成误检,影响自动驾驶系统的稳定性与可靠性。

图9 噪点数量随降雨量的变化关系

图10 障碍物1区域点云数量与平均强度随降雨量的变化关系

图11 障碍物2区域点云数量与平均强度随降雨量的变化关系
障碍物1和障碍物2反映了不同种类障碍物在降雨环境中的表现:障碍物1 表面平整且反射系数较高,其在正常环境下反射的平均强度为34.1,降雨过程中的影响不足以使反射激光完全衰减,因此其受降雨过程影响较小;障碍物2 表面反射率较低且不平整,更易被散射至完全衰减,因此其在降雨量R≥11.6 mm/h环境下点云数量急剧减少,以至于难以被检测系统检测到,造成系统失效。
在空间噪点数量、选定区域的点云数量和平均强度方面,本文衰减模型的仿真结果与实际测试结果较为接近,说明模型具备良好的仿真效果。此外,与文献[3]和文献[9]中的方案进行对比,选取统一试验场景且降雨量R=11.6 mm/h,根据4.3 节提出的指标进行比较评价,结果如表2所示。

表2 同一场景下不同衰减模型指标比较
本文衰减模型相较于文献[3]和文献[9]具有较好的整体仿真效果,且相对于不同尺寸的障碍物表现出更接近实际测量的点云结果,在点云数量与平均强度上具有更小的误差,说明本文衰减模型对于降雨环境具有更接近真实环境的仿真效果。
5 结束语
考虑到激光雷达在降雨环境中感知能力大幅降低,而现有激光雷达衰减模型缺乏噪点解释能力和随机性等问题,本文提出了面向降雨环境的激光雷达衰减模型,根据现有正常环境下的激光点云,通过建立激光雷达模型、雨滴尺寸分布模型、粒子散射模型以及粒子噪点模型计算在特定降雨量环境下的点云表现,获得降雨环境下的衰减点云。在噪点产生方面,应用后向散射噪点模型进行了分析解释,并使用随机雨滴生成增强了模型的随机性。
试验结果表明,该衰减模型与实际环境点云较为相近,相较于现有衰减模型准确度更高,能够更加真实地反映降雨过程对激光雷达的影响,包括空间噪点数量增加、障碍物返回点云数量减少与平均点云强度降低。以上影响很大程度地限制了激光雷达的感知能力。未来可对雨滴附着表面对激光雷达反射的影响进行进一步研究以优化衰减模型,并针对激光雷达的不同工作模式进行建模与验证。
猜你喜欢
北京测绘(2022年5期)2022-11-22 06:57:43
汽车观察(2021年8期)2021-09-01 10:12:41
摄影之友(影像视觉)(2020年4期)2021-01-09 10:10:10
草原歌声(2020年3期)2020-12-08 22:22:28
学生天地(2020年24期)2020-06-09 03:08:56
中国交通信息化(2019年1期)2019-03-26 06:43:46
电子制作(2018年16期)2018-09-26 03:27:00
小学生导刊(2018年19期)2018-08-21 01:44:50
制导与引信(2017年3期)2017-11-02 05:17:02
摄影之友(影像视觉)(2017年3期)2017-04-28 02:34:31