关节镜松解术联合上肢康复训练机器人治疗肘关节僵硬
2023-01-10 14:06邹文邹平安熊杰周明范少勇侯慧铭龚礼胡梁深
实用骨科杂志 2022年12期
邹文,邹平安,熊杰,周明,范少勇,侯慧铭,龚礼,胡梁深
(1.南昌市洪都中医院运动医学科,江西 南昌 330006;2.江西省肿瘤医院骨科,江西 南昌 330029)
肘关节骨折或者外伤后,容易出现关节僵硬,而当肘关节功能下降50%,上肢的功能将下降80%,严重影响日常生活[1]。关节镜松解是治疗关节内因素导致肘关节僵硬的首选手术方式,但由于手术带来的血肿、疼痛、肿胀等不利因素,术后康复往往达不到理想的效果[2]。而自适应力跟踪主动上肢康复训练机器人能更科学个性化的制订康复计划,有效改善术后的关节活动度和功能。本研究旨在探讨关节镜下松解术联合自适应力跟踪主动上肢康复训练机器人治疗肘关节僵硬的临床疗效,现报告如下。
1 资料与方法
1.1 纳入排除标准 纳入标准:(1)均为保守治疗6个月以上肘关节活动度未见明显改善者;(2)均为单侧肘部僵硬患者;(3)双侧上肢肌力大致正常;(4)无跨关节骨痂形成;(5)手术均采取同一方式并由同一术者完成;(6)患者知情同意,病历资料完整;(7)患者依从性好,能配合随访研究。排除标准:(1)病理性骨折;(2)结核、感染等占位性疾病及全身系统疾病;(3)神经损伤患者;(4)依从性差或沟通障碍患者;(5)随访患者资料缺失。
1.2 一般资料 收集2018年1月至2021年6月期间南昌市洪都中医院收治的肘关节僵硬患者31例,其中男18例,女13例;年龄23~52岁,平均年龄(35.3±5.8)岁;其中肱骨髁上骨折患者11例,尺骨骨折患者6例,肘关节软组织损伤患者14例。其中8例肱骨髁上骨折行克氏针闭合复位并内固定已去除外,其余均未行手术治疗。所有患者术前患肢伸直角度20°~50°,屈曲角度75°~90°,健肢屈伸角度均达0°~135°。随机分为对照组15例和观察组16例,其中对照组患者男8例,女7例;平均年龄(33.5±6.2)岁;采用单纯关节镜下肘关节松解手术。观察组患者男10例,女6例;平均年龄(37.2±5.2)岁;采用关节镜下松解术联合自适应力跟踪主动上肢康复训练机器人康复训练。
1.3 方法 两组采用臂丛麻醉辅以静脉全麻,患者均采用侧卧位,患侧上肢外展90°,肘关节屈曲90°置于支架上,使肘关节略高于肩关节水平。使用无菌止血带。先于“软点”(尺骨鹰嘴、肱骨外髁、桡骨小头中心处)注入10~20 mL生理盐水,首先建立前内、外侧入路,清理滑膜及瘢痕组织,显露关节面及骨性结构,处理肱骨冠突窝、桡骨头窝,如有游离体将其取出,骨赘予以磨平。处理完骨性结构后,使用咬钳咬除前方关节囊,再使用刨刀清理残留的关节囊及增生组织。建立后正中入路及后外侧入路,使用刨刀、射频清理鹰嘴窝内增生组织,如有异位骨化予以磨平,最后使用刨刀松解后方关节囊。术毕,以支具固定于伸直位。
1.4 术后康复
1.4.1 第1阶段(急性期,术后2周内) 两组术后当天予以患处冰敷,每次15 min,冰敷2次/d,使用至术后3 d以消除肿胀;口服塞来昔布胶囊(200 mg,1次/d)至术后4周,以术后镇痛及防止骨化形成;患肢肘关节支具固定,抬高患肢,向心性加压按摩,促进静脉血回流。对照组:术后第1天至术后2周即开始行肘关节被动活动训练,每次3组,2次/d,活动度以患者最大耐受幅度为限。观察组:术后第1天至术后2周使用自适应力跟踪主动上肢康复训练机器人被动活动功能,无痛下肘关节功能锻炼,每组10~15 min,每次两组,2次/d,起始活动度设定为伸直0°~屈曲90°,根据患者耐受程度每周增加20°,直至达到伸直0°~屈曲120°。
1.4.2 第2阶段(炎性期,术后2~6周) 两组均继续佩戴支具至术后6周。对照组:术后2周后在被动肘关节活动度训练及物理治疗的基础上增加主动屈伸活动训练,提高肱二头肌、肱三头肌肌力。观察组:术后2周后使用自适应力跟踪主动上肢康复训练机器人在被动训练的基础上进行主动功能训练。使用机器人先测定患肢静态最大交互力[2周约为(41.5±6.3) N],由最大静态交互力,制订实际交互力(为最大静态交互力的50%),每次20 min,2次/d。每2周测定1次,制订实际交互力,直至术后第8周[约为(58.3±7.5) N]。
1.4.3 第3阶段(纤维化期,术后6~12周) 两组均去除支具,增加力量及本体感觉恢复训练。
1.5 观察指标 根据肘关节功能Mayo评分标准[3](优90分以上,良75~89分,中60~74分,差小于60分),对比分析两组患者治疗前后的Mayo评分、肘关节优良率及肘关节活动度的差异性。
2 结 果
2.1 两组手术前后Mayo评分情况 31例患者术后伤口均愈合良好,未出现感染、神经症状、异位骨化等并发症。两组患者均在术后遵照各自康复计划执行功能锻炼。术后两组患者均获10~15个月随访,平均(11.5±3.3)个月。术前两组患者Mayo评分比较,差异无统计学意义(P>0.05);术后两组患者的Mayo评分均明显升高,差异有统计学意义(P<0.05),且观察组比对照组升高的更明显,差异有统计学意义(P<0.05,见表1)。
表1 两组手术前后Mayo评分比较分)
2.2 两组手术前后肘关节优良率 术前对照组肘关节功能中6例,差9例,优良率为0;术前观察组中5例,差11例,优良率为0;两组优良率比较差异无统计学意义。术后对照组优7例,良5例,中2例,差1例,优良率80.0%;术后观察组优10例,良5例,中1例,优良率为93.4%;观察组优良率显著高于对照组,差异有统计学意义(P<0.05)。
2.3 两组手术前后肘关节活动范围 术前两组患者的肘关节活动范围比较,差异无统计学意义(P>0.05);术后两组患者的肘关节活动范围均较术前明显增加,差异有统计学意义(P<0.05);且观察组比对照组增加的更明显,差异有统计学意义(P<0.05,见表2)。
表2 两组手术前后肘关节活动范围比较
2.4 典型病例 35岁男性患者,骑电动车摔伤致左肘关节肿痛,X线片示左肱骨髁上骨折,位置尚可。行石膏固定,4周后拆除石膏,并行功能锻炼,半年后肘关节活动度为32°~81°。后患者来我院住院治疗,入院后完善相关辅查后,在臂丛麻醉辅以静脉全麻下行关节镜下松解手术,术后使用自适应力跟踪主动上肢康复训练机器人康复训练,术后3个月肘关节活动度为5°~120°。手术前后影像学资料见图1~8。
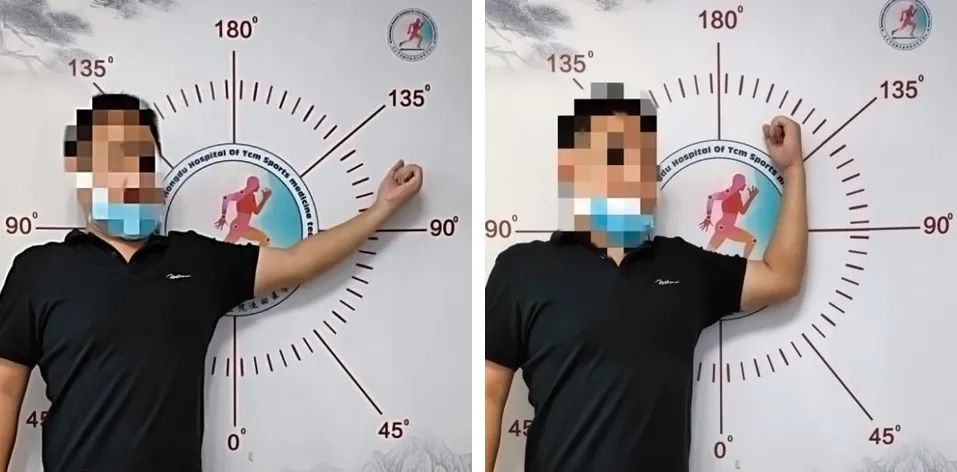
图1 术前左肘关节伸直角度为32°,屈曲角度为81°
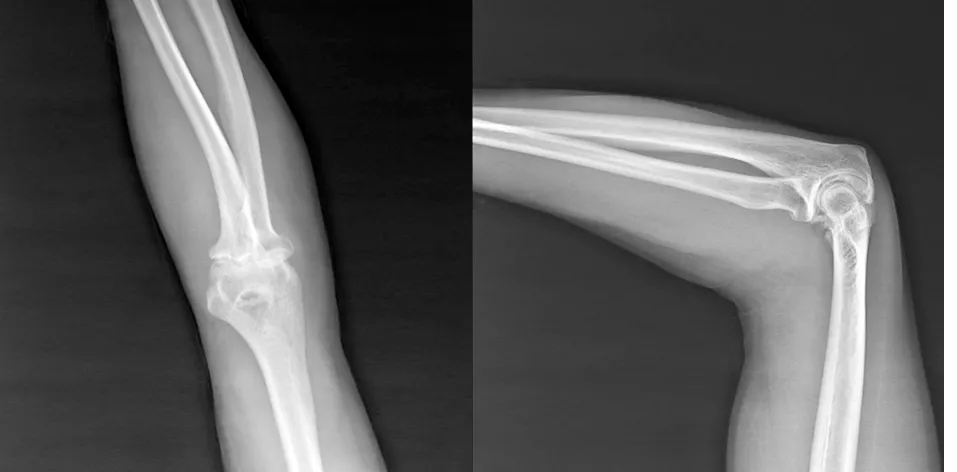
图2 术前X线片示左肘关节关节腔内游离体及骨赘形成
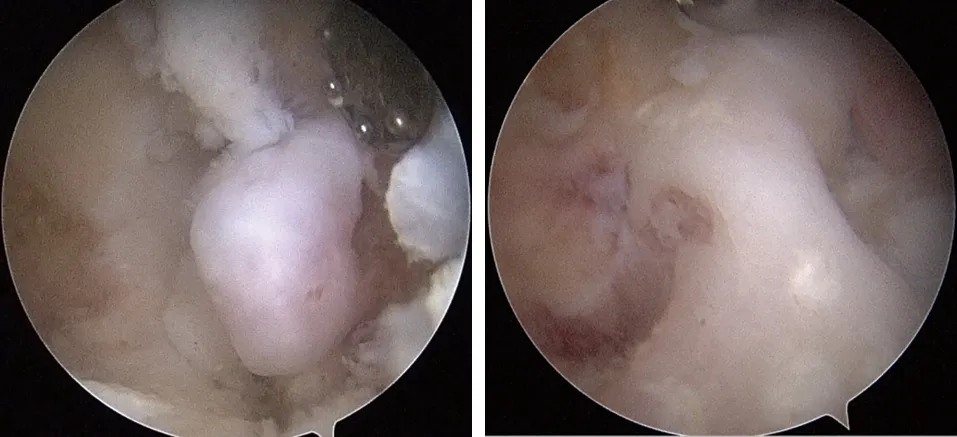
图3 关节镜下见左肘关节内瘢痕组织黏连及游离体

图4 术后2周内进行被动活动度训练 图5 术后2~8周进行主动功能训练
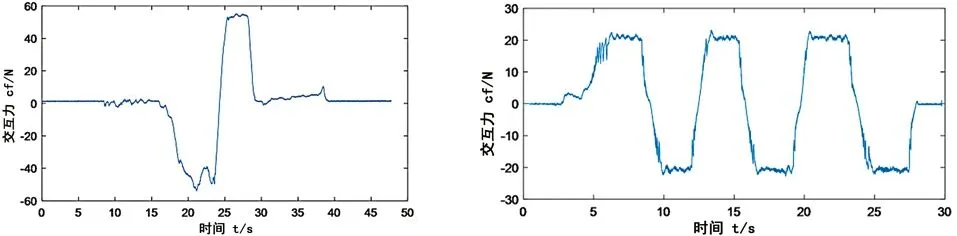
图6 初次测定患肢静态最大交互力约为52N 图7 由最大静态交互力制定实际交互力为26 N
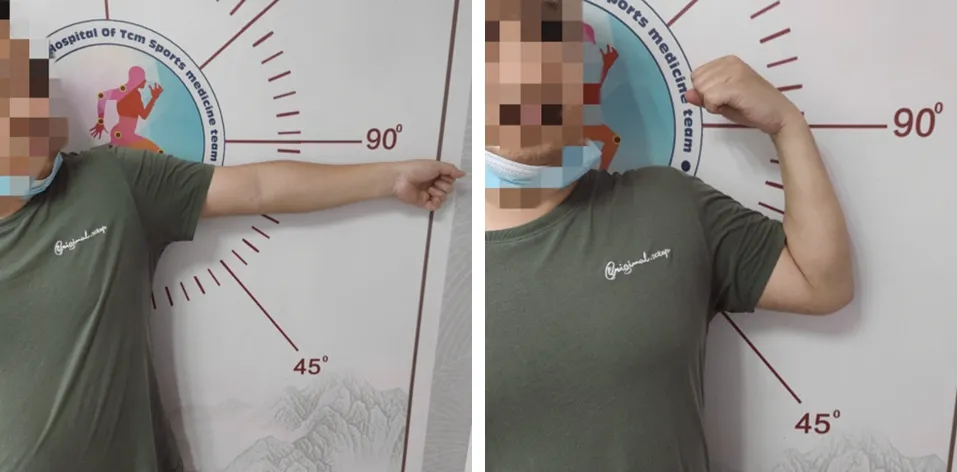
图8 术后3个月肘关节伸直角度为5°,屈曲角度为120°
3 讨 论
关节镜技术相较传统切开松解手术创伤更小、出血更少,已成为松解关节内因素导致肘关节僵硬的首选手术方式[4]。Kodde等[5]比较了开放关节松解术和关节镜关节松解术,研究表明关节镜手术比开放关节松解术更安全、创伤更小,但术后患者往往因为功能锻炼不当造成疼痛及肿胀加重,影响患者的康复效果或产生异位骨化,导致肘关节二次黏连[6-7]。杨超群等[8]认为,关节镜下松解肘关节僵硬,术后康复不当易发生异位骨化,而术后患肢无法科学地设计主动力量训练常常导致肌肉废用性萎缩或者二次损伤[9]。因此,术后科学化、个性化的康复计划尤为重要。
2000年清华大学首次成功研制出了肩关节康复机器人[10],近期东南大学潘礼正等[11]提高康复训练机器人的运动控制性能,提出基于动态插补策略的控制系统设计方法。目前大多数的肢体康复训练机器人还存在以下一些问题[12-14]:现有的大多数康复训练机器人都是进行的被动康复训练,达到恢复患肢运动功能的目的,缺乏主动康复训练,患者在康复训练中的参与度较低;患者常在术后功能康复中因为疼痛或者训练力度过大,常常出现沮丧或抗拒情绪。笔者认为,通过更加科学的主被动相结合的个体化训练方案,可减少患者术后因训练过度产生的抗拒情绪,还可提高康复训练的安全性。
本研究通过跟踪随访采用自适应力跟踪主动上肢康复训练机器人进行关节镜松解术后康复的16例患者的疗效,结果显示术后Mayo评分、肘关节优良率及肘关节活动度等指标均优于单纯使用关节镜松解术的15例患者,并能取得较好的临床效果。自适应力跟踪主动上肢康复训练机器人的机器臂设计针对主动康复训练方法和机械臂控制系统,患者通过推拉机械臂末端接触球完成训练任务,系统在训练过程中通过在线辨识算法实时记录患者训练数据,通过主被动的训练任务能够逐步改善患者患肢的运动功能,能够帮助患者进行针对性的康复训练,缩短康复时间,提高康复效果[15]。针对自适应力跟踪主动上肢康复训练机器人的运动控制方法和系统研究在现代康复医学中具有广阔的研究价值。
综上所述,关节镜下松解术联合自适应力跟踪主动上肢康复训练机器人治疗肘关节僵硬,能通过制定个性化锻炼方式,完成主被动的训练任务,能有效改善肘关节活动度及功能,具有较好的临床疗效。
猜你喜欢
实用手外科杂志(2022年2期)2022-08-31
中华养生保健(2022年10期)2022-05-23
昆明医科大学学报(2022年2期)2022-03-29
现代临床医学(2021年5期)2021-11-02
广西医科大学学报(2021年4期)2021-05-25
中华肩肘外科电子杂志(2020年1期)2020-12-20
健康大视野(2020年22期)2020-11-30
中华肩肘外科电子杂志(2020年1期)2020-08-24
中华肩肘外科电子杂志(2019年4期)2019-01-03
中国美容医学(2018年12期)2018-02-27