
带精准对位双向移动式启闭机研究与应用*
2022-12-28 05:54:36陈佛生
机电工程技术 2022年11期
郑 伟,陈佛生※
(1.广东省建筑机械厂有限公司,广州 510500;2.广东江海机电工程有限公司,广州 510500)
0 引言
水利水电工程中的设备大多面临山风等复杂的使用环境,传统移动式启闭机[1-2]的大车行走机构大多没有设置自动对位装置,存在自动化程度低、操作不方便等问题[3],特别是用移动式启闭机来启闭垂直水流方向上的多孔闸门(或拦污栅),或在水流方向上用其来启闭闸门、拦污栅和清污[4],由于启闭机行走速度较大、自身高度较大(门式)以及吊具通过柔性的钢丝绳与起升机构连接,在惯性等因素的作用下,需要人工反复点动行走电机来对位,对位时间较长,且效率低,这些问题在依赖驾驶室操作的门式启闭机的使用过程中特别明显,往往需要人辅助吊具或吊物入槽,人工成本高,同时存在一定的安全隐患。
在一些水利水电工程中,水流方向上的闸门与拦污栅之间、拦污栅与清污耙斗槽之间距离小,通过功能多样化设计的启闭机往往要兼顾启闭闸门、提栅和清污,通常不同功能之间的起吊中心距较小,移动式启闭机或其小车所需要行走的距离较小,一般在500~2 500 mm之间。短距离适合慢速行走,传统的慢速行走一般通过减速机减速或变频调速来实现,这些减速方式存在成本高等一系列问题。
针对水利水电工程中清污机的孔口对位的问题,刘晓蓉[5]开展了全自动清污机孔口定位研究,采用接近开关检测感应块与变频多速段相结合的控制的方法来实现清污机精准定位,但同时指明定位精度受接近开关检测距离和外界因素影响,并且未涉及双向移动式启闭机或双向移动式清污机的对位问题,其研究还未全面解决不同行走机构的精准对位问题。
本文研究了适合长距离快速行走的大车行走机构的精准对位方法和适合短距离行走的新型小车行走机构,可系统性全面解决双向移动式启闭机的大小车精确对位方法,且与传统的方法与装置相比,具有作业更加安全可靠、制造成本更低等优点,可提高移动式启闭机对位自动化、智能化[6]水平,促进智慧水利[7]建设。
1 两种不同行走机构的结构及工作原理
1.1 适合长距离快速行走的大车行走机构
(1)具有精准对位的大车行走机构的组成
具有精准对位[8]的大车行走机构(泛指适合长距离行走的快速行走机构)由行走电机(含减速机、制动器)、十字限位开关[9](双输出行程开关)、停位触发装置、减速触发装置、路轨和带变频器的PLC[10]控制系统等组成,其中的行走电机为变频电机。路轨安装在排架、闸墩或门架上;减速触发装置和停位触发装置安装在各个孔口对应的排架或闸墩上,如图1所示。
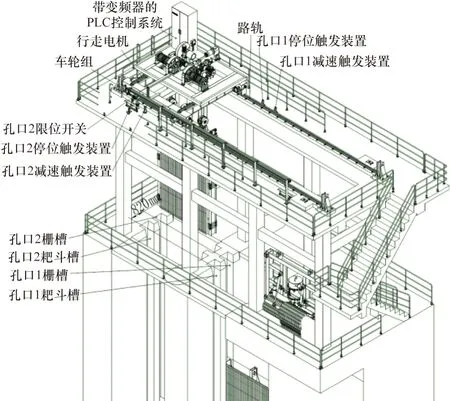
图1 具有精准对位的大车行走机构的组成
(2)大车行走机构的精准对位原理
根据布置,在排架或闸墩上设置各孔闸门或拦污栅启闭时控制移动式启闭机行走的减速和停位触发装置。当移动式启闭机沿轨道行走时,安装在其上的十字限位开关会先触碰对应孔口的减速触发装置,触碰后,十字限位开关旋转90°,并向PLC 发出减速指令,PLC 将指令发送至变频器,变频器控制行走电机以最低稳定运行频率(国产电机通常为5 Hz∕min)低速继续前行,运行至停位触发装置后,触发同一十字限位开关再次旋转90°,这时PLC 将停位指令反馈给变频器,变频器将0 Hz 运行频率反馈给行走电机,使行走电机无转速输出;与此同时,PLC 将制动指令反馈给制动器并对行走电机制动,行走电机无转速输出和制动的共同作用使启闭机实现自动精准对位,其工作原理如图2所示。
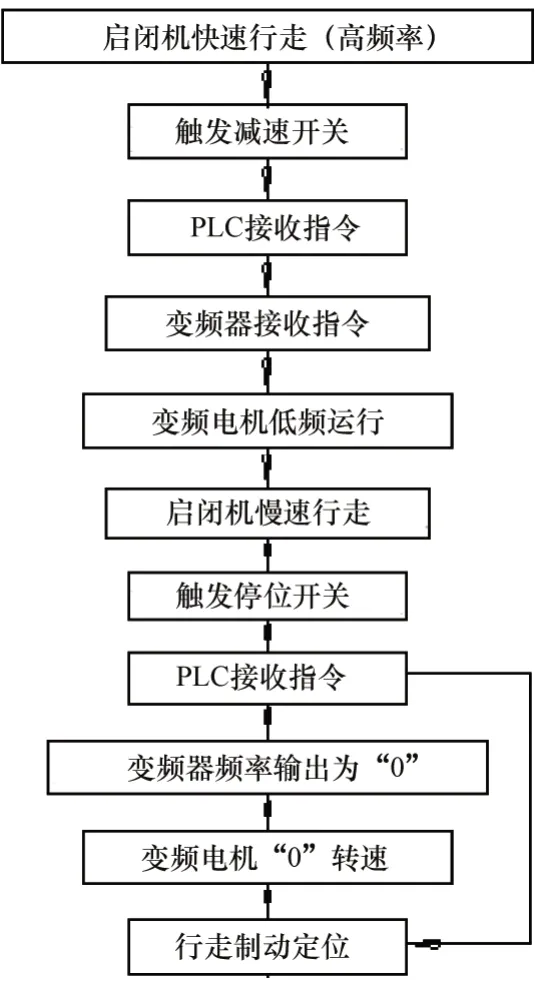
图2 具有精准对位的大车行走机构的控制原理图
(3)大车行走机构的精准对位的优点
大车行走机构通常为露天工作,安装定位感应块的平台经常有人员走动,感应块容易被人或物体扰动或遮挡,如果采用接近开关作为传感器,感应块扰动或高度变化均会影响检测的精度,从而影响定位精度。而采用十字限位开关,其触发方式为机械式,除非故意为之,发生扰动的概率较小,方便日常维护和使用。
1.2 适合短距离慢速行走的新型小车行走机构
(1)新型小车行走机构
如图3所示,新型小车行走机构[11]主要由路轨、行走滑块、行走滑块压板、侧导向轮、连接耳板、驱动装置和行程控制装置等组成。路轨通过压板固定在大车架(大车架可以是台车架,也可以是门架)上;行走滑块通过滑块压板与小车架连接,固定在小车架底部,滑块支撑在路轨上;侧导向轮安装在小车架上,与路轨间隙为2~3 mm,防止小车行走过程中发生侧向偏移或啃轨;连接耳板焊接在小车架上,连接耳板设有与驱动装置连接的轴孔;驱动装置为电液推杆及其相关连接件,电液推杆的缸体端通过推杆底座固定在大车架上。
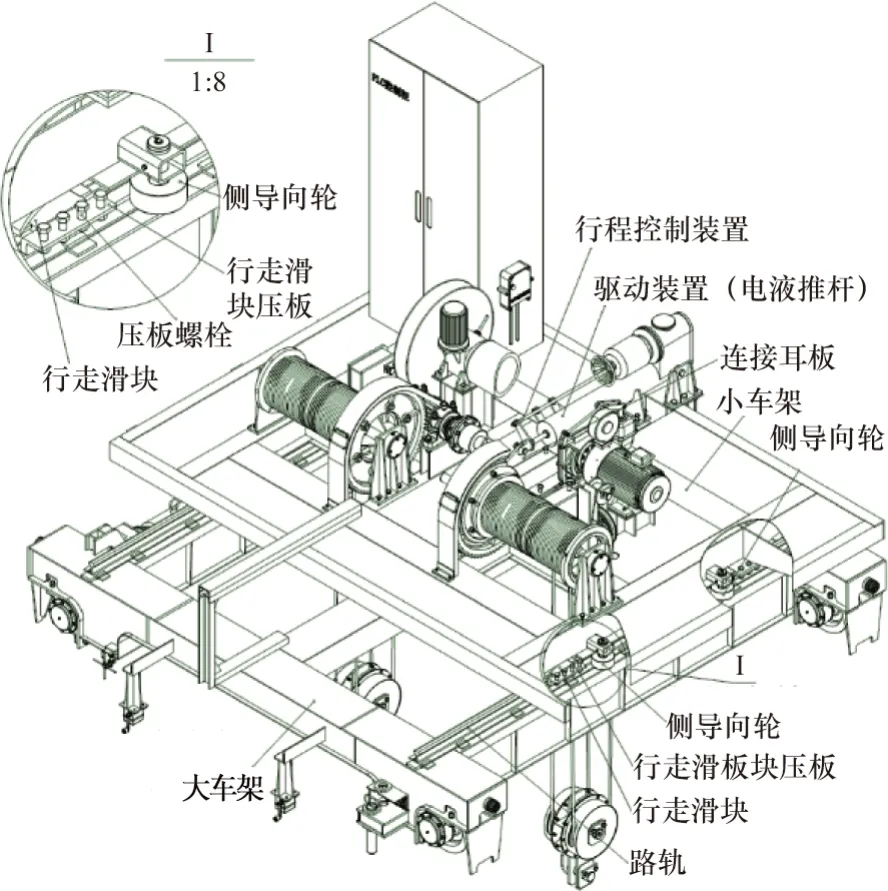
图3 新型小车行走机构组成
(2)驱动装置
如图4所示,驱动装置由电液推杆、手摇机构、推杆座、推杆底座、调节底座、调节座、调节螺栓螺母、缩回传感器、伸出传感器、定位杆和销轴等组成。电液推杆的缸体端与推杆座通过销轴连接;推杆座通过螺栓固定在推杆底座上;推杆底座焊接在大车架上。装配完成后,通过电液推杆的伸出与缩回使小车行走。电液推杆的活塞杆为截面较小的细长构件,长期处在水平状态的电液推杆,如果行程较大且处于伸出状态,在自重等作用下,容易造成活塞杆变形,影响推杆的正常使用。为了解决此问题,在电液推杆的油缸外壳底部增设一套推杆调节座,以使活塞杆基本不承受电液推杆缸体端的重力。装配时,先将电液推杆固定在推杆座上,并将活塞杆与连接耳板连接,使其呈水平状态,然后将调节底座放置在不影响小车运行的位置,并将其焊接在大车架上,配装好调节座使其与电液推杆的油缸底部接触,但不产生除支撑推杆重力以外的向上的附加支撑力,然后通过调节螺栓螺母固定好调节座。为限制小车的运动范围,在电液推杆上设置了伸出和缩回的位置传感器,传感器安装在电液推杆的油缸外壳上,定位杆安装在活塞杆上,活塞杆带动定位杆一起运动,可通过调节定位杆上的感应块的位置来控制活塞杆的伸出长度。
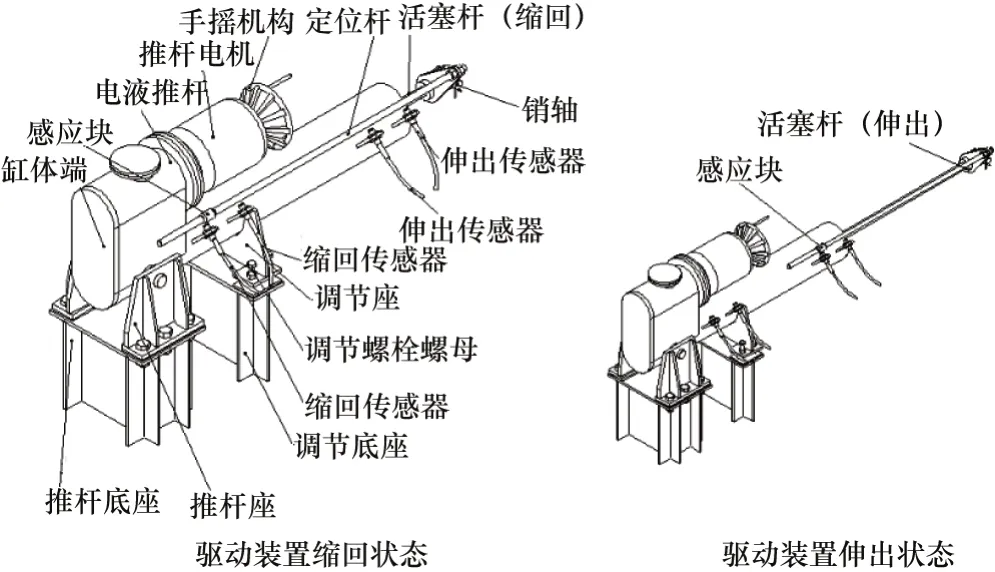
图4 驱动装置(电液推杆)组成
(3)新型小车行走机构精准定位原理及优点
电液推杆是一种机、电、液一体化的新型柔性传动机构[12-14],通过液压传动实现机械运动,具有调速性能好、运行速度慢、冲击性小等特点。因为其推拉速度可选择在1.5 m∕min 以内,且不像传统行走电机启动或制动时冲击大,一般不需要像大车行走一样先减速后停位便可实现精准对位。
如图3所示,通过安装在小车架上的导向轮导向作用,使得小车只能沿小车路轨方向上运动。工作时,通过电液推杆的伸出和缩回可实现小车的往复运动,同时可通过伸出和缩回位置传感器来控制小车的行走范围,如图5所示的小车分别处于启闭拦污栅和清污工作时的位置。
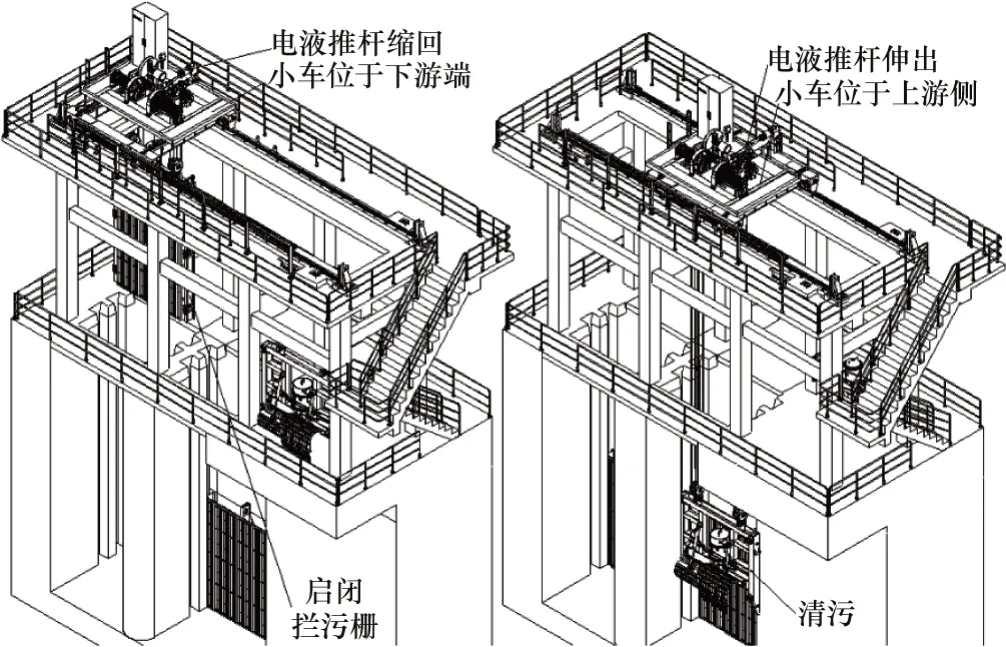
图5 新型小车行走机构运行状态图
小车通过滑块支撑在大车架上,且通过电液推杆与大车架一直保持连接,因电液推杆可施加推力和拉力,在行走滑块压板、侧导向轮和电液推杆的共同作用下,可克服来自任何方向上的风力,可等效于传统行走机构需要配置的锚定、行程限位(因电液推杆已配置)、夹轨等安全保护装置的作用。由于小车的行走是通过电液推杆的伸出与缩回来实现,并不需要像传统行走方式一样将小车锚定在大车架上,不需要人工解锚便可操作小车行走,有利于实现自动化控制,并且制造成本低。
在电液推杆电机的末端设有手摇机构,可实现无电或电气故障下的小车行走,因此新型小车行走机构可提高小车应急行走能力和安装调试的便利性。
2 两种不同行走机构在双向移动式启闭机上的应用
下面以甘肃中部生态移民扶贫开发供水工程总干渠前池双向移动式启闭机为例来说明两种不同行走机构的应用。
2.1 工程概况及总干泵站前池的布置
甘肃中部生态移民扶贫开发供水工程项目位于白银市靖远县北部及平川区境内[15],属Ⅱ等工程,工程规模为大(2)型,包括1条总干渠、3条干渠、4条分干渠,项目总投资为41.76 亿元。总干渠泵站进水口设有引水前池,前池进水口处设有两孔拦污栅、卸污平台、启闭机排架和一台QT-2×100-20 双向移动式启闭机。拦污栅前设有耙斗槽,耙斗可以沿耙斗槽升降以清理拦污栅前的污物,如图6所示。拦污栅栅槽与耙斗槽之间的中心距为820 mm,拦污栅与耙斗的吊点距为768 mm,小车行走距离小。
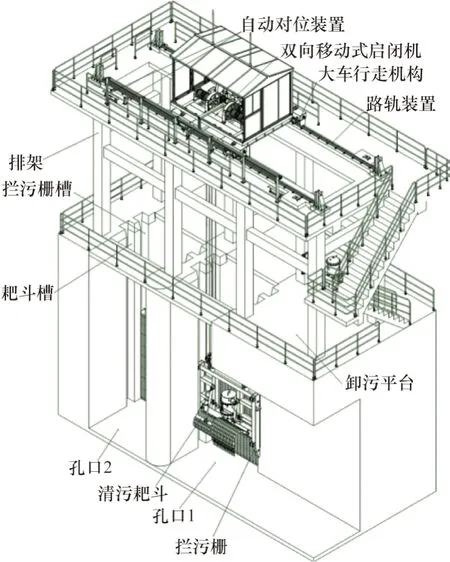
图6 总干泵站前池进水口布置图
2.2 QT-2×100-20双向移动式启闭机
(1)双向移动式启闭机
QT-2×100-20 双向移动式启闭机额定启闭容量为2×100 kN,用于清污和启闭拦污栅,主要由小车及小车上的起升机构、小车架、电缆卷筒、机房、小车行走机构、大车行走机构、台车架、液压抓梁、液压耙斗、保护装置及控制系统等组成,如图7所示,大车行走机构设有精准对位装置,小车行走采用电液推杆作为行走驱动装置,可实现各孔口清污和启闭拦污栅时的精准对位。

图7 QT-2×100-20双向移动式启闭机
(2)大车行走机构
大车轨距3 500 mm,行走机构采用变频调速,最高行走速度为12 m∕min,行走于两个孔口与卸污平台之间。在两个孔口分别设有减速和停位触发装置,如图7所示,用于两个孔口清污或提栅时在垂直于水流方向上的精准对位,触发减速后,其行走速度降至1.2 m∕min,以利于触发停位后的精准对位。
(3)小车行走机构
根据启闭拦污栅和清污时的吊点中心距为768 mm,选择集驱动、安全保护等功能于一体的电液推杆作为小车行走的驱动装置,电液推杆型号为DYTP5000,行走速度为1.08 m∕min (推)、1.38 m∕min(拉),综合卸污、功能转换和行程调节需要,选定电液推杆行程为1 100 mm,电液推杆推出时为清污、缩回时为启闭拦污栅,在清污和启闭拦污栅吊点中心外侧设有不少于50 mm的调节余量。
除甘肃中部生态移民扶贫开发供水工程外,所研究的自动对位方法和新型小车行走机构已同时或独立应用于广州市番禺区南顺泵站等工程的启闭机或清污上,自动精准对位效果良好,使用和维护方便,深受业主好评。
3 结束语
(1)大车行走精准对位技术可应用于移动式启闭机(包括门式启闭机和台车式启闭机)的大车行走机构、运行范围超过2 500 mm 的双向移动式启闭机的小车和桥门式起重机的大小车行走的精准对位。
(2)新型小车行走机构适用于短距离行走,其行走范围为500~2 500 mm 为宜,因其行走范围较小,小车行走速度建议小于2 m∕min,有利于运行安全。
(3)新型小车行走机构驱动装置的数量应根据小车的轨距来选择,整体刚性较好的小车,适宜采用推拉力较大的电液推杆取代多组驱动装置,避免因多组驱动装置推拉不同步发生故障或增加同步控制成本。
(4)带手摇机构的电液推杆,其电动时,必须将手摇机构拆下。
猜你喜欢
小水电(2022年5期)2022-10-17 05:24:36
天津音乐学院学报(2022年2期)2022-07-28 02:32:12
农业装备与车辆工程(2021年8期)2021-08-28 09:49:16
南方农机(2021年1期)2021-01-20 11:41:46
港口装卸(2020年3期)2020-06-30 10:37:54
四川水力发电(2020年2期)2020-05-23 10:51:10
山东水利(2016年8期)2016-04-07 13:29:11
印制电路信息(2015年6期)2015-12-30 12:57:52
当代音乐(下旬刊)(2015年5期)2015-05-30 05:21:05
印制电路信息(2014年4期)2014-05-04 07:09:24
