
基于点云的空间非合作目标结构识别问题研究
2022-12-17 02:59陈霈然张晓龙刘晓峰蔡国平吴勇军
上海航天 2022年4期
陈霈然,张晓龙,刘晓峰,蔡国平,吴勇军
基于点云的空间非合作目标结构识别问题研究
陈霈然1,张晓龙2,刘晓峰1,蔡国平1,吴勇军1
(1.上海交通大学 船舶海洋与建筑工程学院,上海 200240;2.上海航天控制技术研究所,上海 201109)
在空间非合作目标捕获任务中,从传感器数据中识别出目标表面的可抓取结构是一个有待解决的问题。以卫星点云数据集作为对象,对4种基于神经网络算法(PointNet、PointNet++、SPLATNet和SO-Net)在卫星结构分割识别任务中的性能进行了比较分析。为了能够更好地测试算法性能,基于NASA在线数据库构建了训练测试数据集,并给出一种点云数据的快速构建方法。使用该方法,可以实现成批量地生成点云数据。仿真测试结果显示:PointNet++在卫星完整点云数据集和非完整点云数据上的分割准确率都是最高,并且分割效果也优于其他算法。
空间抓捕;非合作目标;卫星点云;深度神经网络;结构识别
0 引言
使用空间机器人开展非合作卫星在轨服务任务是未来一项十分重要的空间任务。为确保任务的顺利开展,空间机器人首先需要完成对非合作卫星的捕获。相对于合作卫星,非合作卫星不能向服务航天器主动发动运动学信息,且无先验的几何信息和专门的抓取结构,这些不利因素给抓捕任务带来了极大的挑战。为完成该类目标的抓捕操作,空间机器人首先需要利用传感器数据完成对卫星整体及卫星上的可抓取结构的识别,然后操作机械臂完成抓捕操作。可以说,识别卫星以及卫星上的可抓取结构是非合作目标捕获任务得以完成的重要前提。
到目前为止,关于卫星识别问题的研究主要集中在如何利用卫星典型结构的局部特征或局部特征之间的关系来识别出卫星整体和其具体型号。相关研究包括,WANG等[1]在解决TSS-1卫星的识别问题时提出将图像数据中卫星边界和形心关系(例如边界长度、图形面积、形心到边界的最大和最小距离等)作为卫星特征,并利用这些特征通过搭建和训练人工神经网络来实现对TSS-1卫星的识别。DU等[2]提出使用图像特征索引(Eigen-indexing)来描述卫星局部结构之间的关系,并根据在线获取图像特征索引与数据集卫星图像特征索引的匹配程度完成对卫星具体型号的识别。MENG等[3]提出使用核局部保持映射(Kernel Locality Preserving Projections,KLPP)来对由不变矩(Moment Invariants)、傅里叶描述子(Fourier Descriptors)、区域协方差(Region Covariance)和方向梯度直方图(Histogram of Oriented Gradients)4类特征构成的卫星图像特征向量进行降维操作,进而获得特征流形(Feature Submanifold)。并在此基础上,采用-近邻法(-Nearest Neighbor Method,NN)来实现对BUAA-SID 1.0数据集中卫星图像数据的分类和识别。为了进一步提高图像数据中卫星的识别精度,DING等[4]提出使用卫星图像的放射不变矩(Affine Moment Invariant,AMI)和多尺度自卷积(Multi-scale Auto-convolution,MSA)来描述卫星,并利用-近邻分类器(-Nearest Neighbor Classifier)来进行卫星识别训练。ZHAO等[5]提出一种基于稀疏编码的统计隐含语义分析方法(Sparse Coding Based Probabilistic Latent Semantic Analysis,SC-PLSA)来提取卫星特征。不同于上述的工作,ZHANG等[6]没有采用特征提取+训练的方式来解决识别问题,而是直接采用数据集训练的方式来解决识别问题。实验结果表明,他们所采用的同胚流形分析(Homeomorphic Manifold Analysis,HMA)和高斯过程回归(Gaussian Process Regression,GPR)方法能够在BUAA-SID数据集上获得非常好的训练效果。除了以上基于可见光图像的卫星识别问题研究外,LIU等[7]对基于用雷达高分辨距离像(High Resolution Range Profile,HRRP)[8]的卫星识别问题进行了研究,并提出通过使用小波降噪法(Wavelet Denoising Method)来提高卫星HRRP数据特征的质量和稳定性,进而提高卫星的识别率。另外,HAN等[9]提出通过融合红外可见光图像(Visible and Infrared Image)的Zernike不变矩(Zernike Invariant Moments)来解决卫星的识别问题。
从以上文献调研的结果可以看出,现有的工作已经取得了不错的成果,但仍有些缺陷。例如,现有的工作几乎都是利用可见光图像作为对象来研究卫星识别问题。尽管这种数据包含许多卫星的结构特征,但其很容易受到光线条件的影响。在太空复杂的光线条件下,图像会因为过曝或曝光不足损失很多细节特征,这会导致卫星识别准确率下降。除此之外,鲜有科研人员对卫星子结构的识别问题进行研究。事实上,卫星子结构识别问题对于很多在轨任务来说是非常重要的,对于抓捕任务,通过识别卫星的子结构,空间机械臂可以决定潜在抓捕区域的位置,例如载荷连接装置、尾喷管或其他位置。另外,对卫星大尺度结构,例如太阳能帆板、天线等进行识别,空间机器人可以规划机械臂的无碰撞抓捕路径,从而避免任务风险。由此可见,卫星子结构识别问题是一个非常值得深入研究的工程问题。
考虑到由深度相机获得的点云数据不易受光照条件的影响,因此选择点云数据进行卫星结构的识别在工程上更具可行性。虽然点云数据能够提高识别的稳定性和精度,但其数据结构相对图像来说是过于复杂的,其自身的无序性、稀疏性使得传统的基于人为先验规则的识别和分割算法很难取得较高计算精度。近年来为解决这一问题,研究学者提出一系列的基于深度学习点云识别算法。尽管这类算法在很多结构的识别问题上取得了不错的效果,但这类算法是否可以解决卫星结构的识别问题是有疑问的。另外,在众多算法中哪种方法更适合解决卫星结构识别问题也是一个值得探讨的问题。本文对上述2个问题进行了深入的研究,并为此构建了由卫星点云数据构成的数据集。通过训练发现,最新提出的以PointNet[10]、PointNet++[11]、SPLATNet[12]和SO-Net[13]为代表的点云识别深度神经网络能够较好地解决完整卫星结构数据和非完整卫星结构数据的识别问题。通过对比4种深度神经网络训练结果,我们可以直观地了解它们的区别和优缺点。这些分析结果对于解决实际工程问题是十分有价值的。
1 点云分割识别算法比较
与二维可见光图像数据相比,三维点云数据在刻画物体表面结构细节方面具有明显的优势。同时,三维点云数据的精度不易受太空环境复杂光照条件的影响。这些优势让三维点云数据成为解决卫星结构分割识别问题的首选。然而,点云数据自身的无序性、稀疏性特点也给分割识别算法的开发设置了不小的难度。在早期的研究中,学者们提出了多种基于人类规则的算法[14-18]。但这些算法分割识别精度还远达不到工程应用的水平。近年来,随着机器学习算法的迅速发展,国内外学者提出了多种基于神经网络的点云分割识别算法,例如PointNet、PointNet++、SPLATNet和SO-Net等。
这些算法在多个公开点云数据集上都取得了非常高的分割识别精度,使得我们有理由相信上述算法是可以用于解决卫星结构的分割识别问题的。然而,选择哪种算法是一个值得深入研究和分析的问题。为了选出更优的选项,本章将对PointNet、PointNet++、SPLATNet和SO-Net算法的基本原理进行介绍,为后续算法性能比较奠定理论基础。
1.1 PointNet算法和PointNet++算法
PointNet算法(如图1所示)是2016年由CHARLES等提出一种针对点云分割与分类的多层神经网络算法。PointNet算法的输入为×3的点云坐标矩阵。为了实现在一个相同视角下提取点云特征,PointNet的开发者设计了一个T-Net网络,经过学习之后该网络可以生成一个3×3的位姿变换矩阵。输入的点云数据在与该矩阵相乘后可以实现空间上的对齐,即将点云旋转到正面。点云数据在经过1个多层感知器(Multi-Layer Perceptron, MLP)的操作后被映射到64维的空间上。PointNet算法会对得到64维空间点云进行特征变换,变换操作是通过乘以 1个T-Net网络生成64×64的矩阵完成的。经过特征变换后的数据再经过1个MLP完成升维操作,进而将原点云坐标映射到1 024维的空间上。此时,原始×3点云坐标矩阵已经被转化成了×1 024的点云特征矩阵。该点云特征矩阵经过最大池化操作(Max Pooling)后便得到了一个1 024维的行向量,该列向量被称为点云的全局特征向量。将全局特征向量特征变换后得到64维点云数据进行拼接,拼接后的数据再经过一个MLP后,输出每个点对应不同所属类型的×概率矩阵。最后每个点选取概率最大的类别作为分割结果,进而实现对点云的分割识别。

图1 PointNet网络[10]

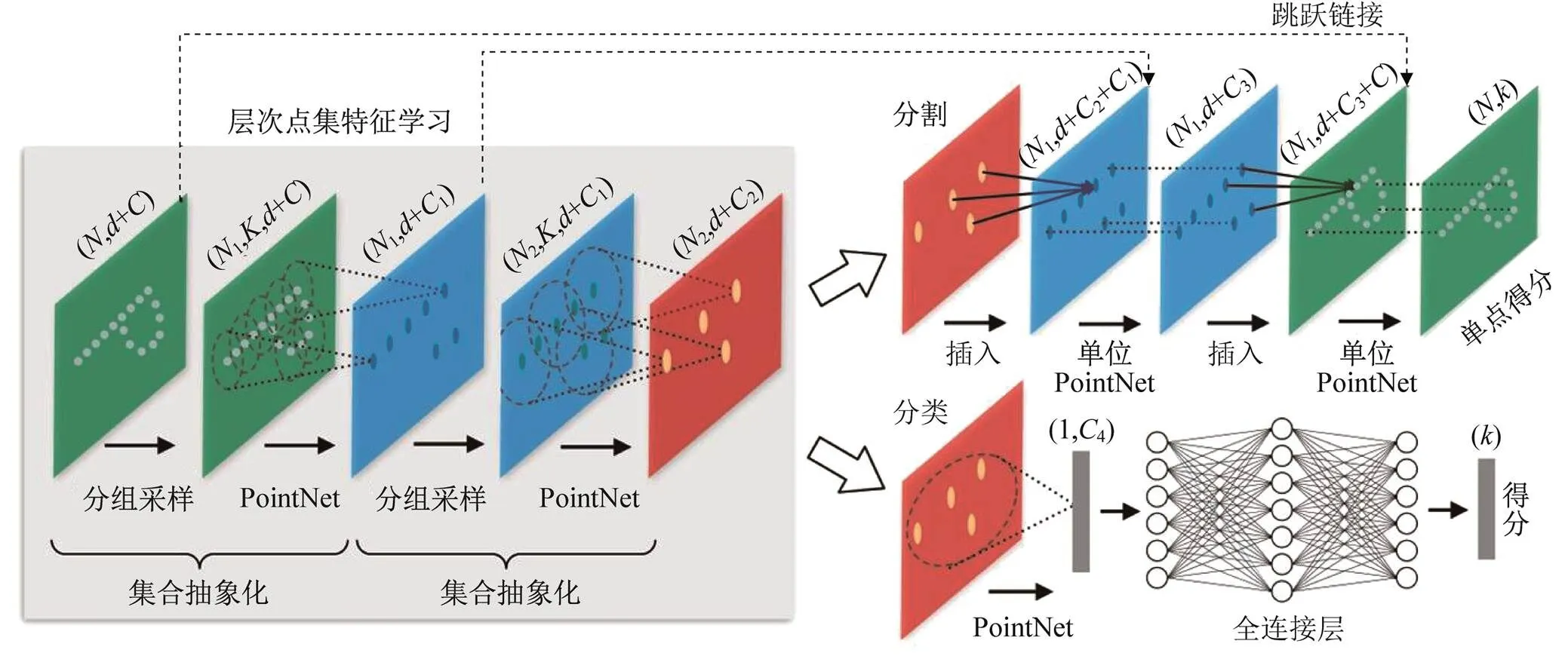
图2 PointNet++网络[11]
1.2 SPLATNet算法
SPLATNet算法是2018年由SU等[12]提出的一种适用于点云和点云+图像的分割识别问题的神经网络算法,由SPLATNet3D网络和SPLATNet2D-3D网络构成。由于本章的研究对象为点云,本文仅对适应于点云分割识别问题的SPLATNet3D网络进行介绍。
SPLATNet3D网络(如图3所示)由3个1×1卷积层(1×1 CONV)和个不同尺度双边卷积层(Bilateral Convolution Layer, BCL)[19]组成,其中为该网络的一个超参数。在使用SPLATNet3D网络进行分割识别时,×3的点云坐标矩阵会首先经过一个1×1卷积层,然后再依次通过个BCL。通过BCL的操作,SPLATNet3D网络便可以提取到不同尺度下点云数据的结构特征向量。再将这些特征结构特征向量拼接并通过2个1×1卷积层,输出每个点的对应不同类别概率,进而完成对点云的分割识别。

图3 SLPATNet网络[12]
1.3 SO-Net算法

1.4 算法比较
以上的各个深度学习算法均可以直接输入点云数据,输出点云分割结果。算法的大致结构也类似,均是对点云数据进行处理得到全局特征向量,之后将全局特征向量进行拼接,经过进一步处理得到点云分割结果。但是各个算法得到全局特征向量的方式不同。
PointNet算法首先将原始点云数据旋转对齐,之后将对齐后的点云通过MLP并再次对齐,进而将每点特征进行升维。算法的这个部分将原始点云映射到高维空间。最后算法通过最大池化操作得到全局特征向量。此算法结构简单,效率最高。
PointNet++算法首先将原始点云进行分组,并利用PointNet算法中特征提取的部分提取子集的全局特征向量,作为整个点云的局部特征向量。接着算法再将局部特征向量再进行分组并提取其全局特征向量作为最终的全局特征向量。此算法相较于PointNet算法新增了分组和分层提取特征向量的部分,结构较为简单,效率高。
SPLATNet算法将原始点云以此通过不同的BCL层,将原始点云映射到不同尺度晶格空间中,并分别提取不同尺度晶格空间中点云的特征向量。最后算法将得到各特征向量进行拼接得到全局特征向量。此算法因频繁通过BCL层进行映射操作,所以效率一般。
SO-Net算法将原始点云映射到SOM节点上,再通过MLP并进行最大池化操作得到每个SOM节点上的特征向量。之后算法将各SOM节点上的特征向量通过MLP并进行最大池化操作得到全局特征向量。算法具体区别见表1。

表1 4种深度学习算法的比较
从上述的介绍可知,4种神经网络算法各有其特点和优势。为了更好地比较评估算法优缺点,第3节将在自建的数据集上对算法性能进行测试。
2 点云数据集的构建
在真实的太空任务中,服务卫星可以使用2种不同的点云数据进行目标卫星结构的分割识别,它们分别是经过三维重建之后的完整卫星点云数据和激光传感器实时获得的非完整卫星点云数据。为评估上述机器学习算法对上述2类数据的分割识别的性能,需要分别构建2类数据对应的训练数据集。
一般来说,利用真实数据构建数据集是最为常见的手段[21]。然而对于卫星结构识别分割问题来说,由于获得在轨卫星真实数据的成本过于高昂,因此本文采用人工手段来构建训练点云数据集。为了保证人工构建的点云数据更贴近真实数据,分析了如图5所示“地球之眼”一号卫星、“日出”卫星、“普罗巴”五号、“依巴谷”卫星、“哨兵”二号、“哨兵”一号、欧洲环境卫星、“陆地卫星”四号、“陆地卫星”一号等真实卫星的结构组成,考虑到对于在非合作卫星抓捕任务中高刚度的卫星发动机喷管可作为抓取结构。因此,在本文构建的点云数据中包括卫星主体、太阳能帆板和尾喷管卫星结构。

图5 参考的卫星图片
在数据集的构建过程中,除了需要解决数据的真实性的问题,还需解决数据的快速生成问题。以著名的ShapeNet[22]数据集为例,其每种类物体所对应数据集都包含有几百到几千不等的点云数据。对于卫星结构的分割识别问题来说,如果采用每个卫星单独创建点云数据的方式来构建数据集,那么数据集的构建过程将是极其麻烦的。为了能够快速成批量地生成点云数据,提出分别采用卫星组件三维建模+点云抽取+点云拼接的总体方案方式来构建原始卫星点云数据集,该数据集中的点云数据不存在位置误差。
在实际的任务中,由于计时误差累积、反射光强度衰弱和散射光噪声存在,激光雷达或深度相机等传感器获得的卫星点云数据是存在位置误差的。为让神经网络的训练更接近实际情况,对每个原始卫星点云添加了1%左右的位置偏差,进而生成了带噪声的点云数据集。该数据集将用于算法的训练和测试。
2.1 卫星完整点云数据集的构建
卫星完整点云数据集构建流程主要分为3部分:三维建模、点云转换和点云拼接。各个部分的具体操作如下。
1)卫星部件三维建模。图5所示卫星的各个部件的形状,使用Inventor软件分别构建6种尾喷管、11种太阳能帆板和13种卫星主体三维模型(样例如图6所示),并将卫星部件三维模型以obj格式保存。obj格式是Alias公司为3D建模和动画软件“Advanced Visualizer”开发的一种标准文件格式,在格式中3D模型表面被离散成若干个三角形面片。obj标准文件主要包含4种数据,分别用以下字母作为每行的开头:v、vt、vn和f。v行数据为三角形面片顶点坐标,vt行数据表示三角形面片的纹理信息,vn行数据是三角形面片的法向量,f行数据为构成三角面片顶点的信息索引。

图6 卫星部件的三维模型
2)卫星部件三维模型的点云转换。首先提取卫星部件obj文件中构成部件表面所有的三角面片顶点信息;其次利用上述顶点坐标生成带1%位置偏差的点云数据,并打上标签;最后生成的部件点云数据模型。
样例如图7所示。

图7 卫星部件的点云模型
3)部件点云的拼接。为了构建卫星完整的点云数据,首先以卫星主体为基础,通过其他部件相对卫星主体的位姿关系计算点云拼接所需位姿变换矩阵。其次利用位姿变换矩阵将其他部件点云变换到卫星主体点云坐标下,进而完成点云的拼接操作。在拼接过程中,为了增加数据的多样性,对尾喷管点云进行了适当变长或缩短操作。完整卫星点云数据生成流程如图8所示。按照此过程,生成了5 263个不同的完整卫星点云数据,样例如图9所示。
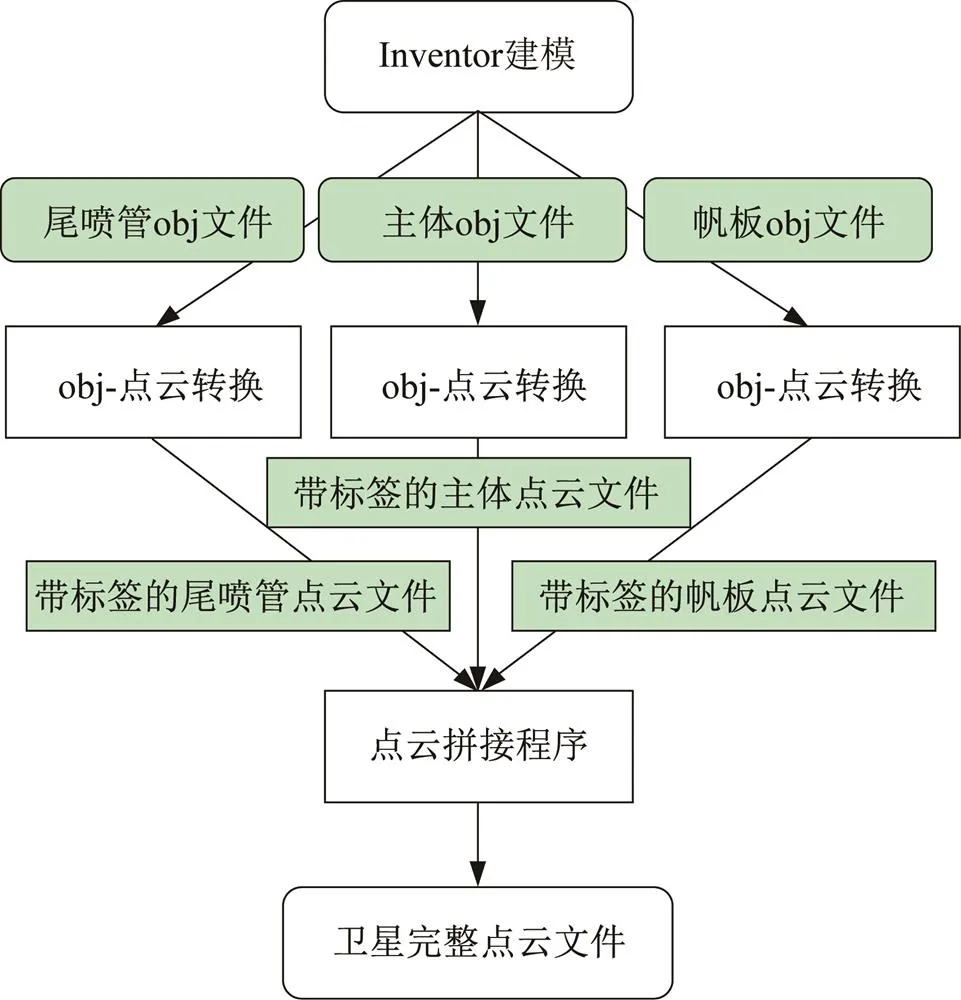
图8 卫星完整点云数据构建流程

图9 卫星三维点云模型示例
2.2 卫星非完整点云数据集的构建
根据激光传感器获取非完整点云数据的原理——激光传感器发射束光线,经物体表面反射后重新被相机接收,相机通过计算每束光的飞行时间,最终得到个物体表面点的三维坐标。将构建卫星非完整数据集的流程分为4个部分:三维建模、标记面片、拼接模型和激光拍摄模拟。各个部分的具体操作如下。
1)卫星部件三维建模。与完整点云数据构建流程相同,首先使用Inventor软件分别构建6种尾喷管、11种太阳能帆板和13种卫星主体三维模型并以obj文件格式保存。
2)标记三角形面片。在计算机图形学中,通常使用三角面片作为物体表面的最小单位[23]。所以构建的卫星表面模型也同样由三角面片构成。但是为了能得到带标签的非完整点云数据,将已构建的卫星部件obj文件中的每个三角面打上标签。
3)拼接得到卫星表面模型。
当此光束与表示部件表面的三角面片相交时,两者的交点便是卫星部件的点云点,计算过程如下。
其中:



图11 面积判别法
非完整卫星点云数据生成流程如图12所示,按照此过程,可以获得5 263个带标签的卫星非完整点云,样例如图13所示。

图12 卫星非完整数据构建方式
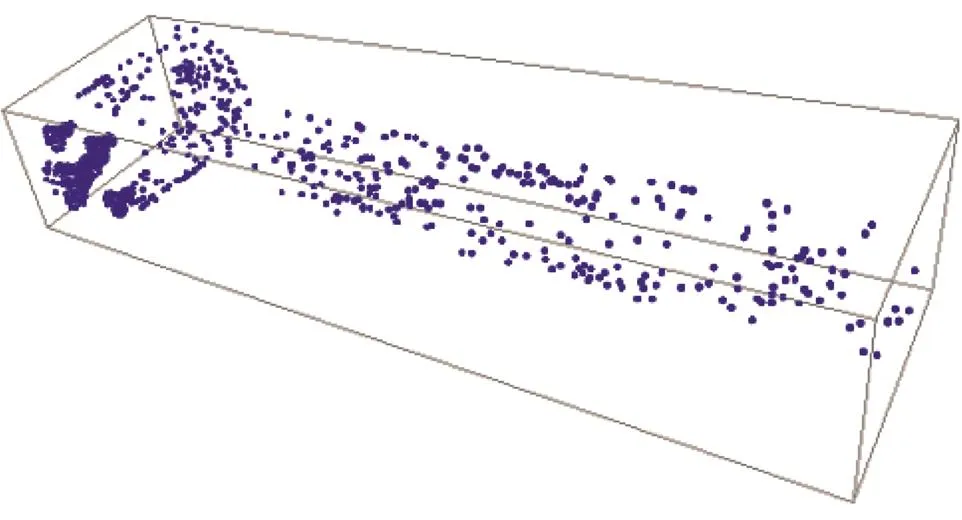
图13 卫星三维非完整点云模型示例
3 各点云算法的性能分析
使用已构建的卫星完整点云数据集和非完整点云数据集分别对PointeNet算法、PointNet++算法、SPLATNet算法和SO-Net算法进行训练和性能测试。为保证测试的公平性,各算法的网络结构以及超参数都与其所在文章保持一致。在训练和测试过程中,完整点云数据集和非完整点云数据集都被划分成3个子集,分别为训练集、交叉验证集和测试集。测试集、交叉验证集和测试集所包含点云的数量分别是 3 835、586和842。从算法的分割准确率和分割实际效果来比较各深度学习算法的性能。
3.1 分割准确率
比较各个深度学习算法的分割准确率。首先将在训练集上训练各深度学习深度网络,并在训练过程中在交叉验证集上进行同步测试,调整神经网络的超参数。其次利用训练后的深度学习网络对测试集上的卫星点云数据进行分割测试。最后利用如下公式求得深度学习算法在测试集上每簇卫星点云的分割准确率:
式中:r为分割识别正确的点云数量;t为此卫星点云簇点的总数。
计算在测试集上的点云分割准确率的平均值作为算法的分割准确率。得到各个算法的分割准确率见表2。由表2数据可知,在卫星完整数据集上,SO-Net算法准确率最低为96.1%,SPLATNet算法与PointNet算法分割准确率相同为98.2%,而PointNet++算法的分割准确率最高,达到了99.2%。而在非完整数据集上,SO-Net算法的准确率只有87.2%,SPALTNet算法的分割准确率为97.6%,略优于PointNet算法的95.7%,PointNet++算法准确率最高为99.6%。

表2 点云分割识别准确率平均值
综上所述,在2种数据集上PointNet++算法的分割准确率均是最高的。所以从分割准确率的角度而言,PointNet++算法在4种算法中为卫星点云分割识别最佳算法。
3.2 分割的实际效果
分割准确率不能作为衡量算法优劣的唯一指标,因为可能会出现准确率较高,但分割结果却很差的情况。使用Meshlab对各个算法在测试集上的点云分割结果进行可视化,借此来检验算法分割的实际效果。
各深度算法在完整数据集与非完整数据集上的分割效果如图14所示。每幅结果子图对应的算法从左到右依次为:PointNet、PointNet++、SPLATNet、SO-Net,其中红圈部分为点云分割错误处。

图14 分割结果
由各图所示的分割实际效果可见,SO-Net算法因为其算法特性,容易出现一个SOM节点分类错误从而导致点云分类片状错误。此种错误往往发生在尾喷管与主体之间,对后续的抓捕任务可能会产生影响。而PointNet算法与SPLATNet算法在各部分连接处(例如主体-帆板)和结构边缘(例如尾喷管的边缘)会出现个别点的分类错误。PointNet++算法的整体效果最好,并且在各部分连接处与精细结构的边缘都取得了很好的分割效果。从实际的分割效果来讲,PointNet++算法为4种算法中的最佳算法。
4 结束语
本文以卫星点云数据为对象,对应用神经网络算法解决非合作卫星捕获任务中的卫星结构识别与分割问题进行了研究。首先为研究测试神经网络算法性能,给出了一种点云数据集快速构建算法,并基于NASA在线数据构造了完整卫星点云数据集和非完整点云数据集。在此基础之上,通过研究发现经过训练后,基于神经网络的PointNet算法、PointNet++算法、SPLATNet算法与SPLATNet算法在2种数据集取得非常好的识别分割效果。相较而言,PointNet++算法的性能更优,卫星点云表面结构分割识别准确率达到了99.0%以上。本文所使用的卫星点云数据集为人工创建,真实情况拍摄得到卫星点云数据的表面分割识别问题仍待后续进一步研究。
[1] WANG Z, BARRACO I, ROVAZZOTTI M, et al. Recognition for TSS-1 satellite body by hybrid neural networks[J]. Nonlinear Image Processing VI, 1995, 2424: 544-555.
[2] DU X, MA J, QASEM M, et al. Eigen indexing in satellite recognition[J]. Proceedings of SPIE-The International Society for Optical Engineering, 1999, 3718: 397-405.
[3] MENG G, JIANG Z, LIU Z, et al. Full-viewpoint 3D space object recognition based on kernel locality preserving projections[J]. Chinese Journal of Aeronautics, 2010, 23(5): 563-572.
[4] DING H, LI X, ZHAO H. An approach for autonomous space object identification based on normalized AMI and illumination invariant MSA[J]. Acta Astronautica, 2013, 84: 173-181.
[5] ZHAO D, LU M, ZHANG X, et al. Satellite recognition via sparse coding based probabilistic latent semantic analysis[J]. International Journal of Humanoid Robotics, 2014, 11(2): 55-1477.
[6] ZHANG H, ZHANG C, JIANG Z, et al. Vision-based satellite recognition and pose estimation using Gaussian process regression [J]. International Journal of Aerospace Engineering, 2019: 1-20.
[7] LIU X, GAO M, FU X. Satellite recognition base on wavelet denoising in HRRP feature extraction[C]// 2007 2nd IEEE Conference on Industrial Electronics and Applications. Washington D.C., USA: IEEE Press, 2007: 2530-2533.
[8] DU L, LIU H W, BAO Z, et al. Radar automatic target recognition based on feature extraction for complex HRRP[J]. ENCE in China, 2008, 51(8): 1138-1153.
[9] PAN H, XIAO G, JING Z. Feature-based image fusion scheme for satellite recognition[C]// 2010 13th International Conference on Information Fusion. Washington D.C., USA: IEEE Press, 2010: 1-6.
[10] QI C R, YI L, SU H, et al. PointNet: deep learning on point sets for 3D classification and segmentation[C]// 2017 IEEE Conference on Computer Vision and Pattern Recognition (CVPR). Washington D.C., USA: IEEE Press, 2017: 77-85
[11] QI C R, YI L, SU H, et al. PointNet++: deep hierarchical feature learning on point sets in a metric space[C]// Advances in Neural Information Processing Systems 30. Washington D.C., USA: IEEE Press, 2017: 5099-5108.
[12] SU H, JAMPANI V, SUN D, et al. SPLATNet: sparse lattice networks for point cloud processing[C]// 2018 IEEE/CVF Conference on Computer Vision and Pattern Recognition. Washington D.C., USA: IEEE Press, 2018: 2530-2539.
[13] LI J, CHEN B M, LEE G H. SO-Net: self-organizing network for point cloud analysis[C]// 2018 IEEE/CVF Conference on Computer Vision and Pattern Recognition. Washington D.C., USA: IEEE Press, 2018: 9397-9406.
[14] AUBRY M, SCHLICKEWEI U, CREMERS D. The wave kernel signature: a quantum mechanical approach to shape analysis[C]// 2011 IEEE International Conference on Computer Vision Workshops (ICCV Workshops). Washington D.C., USA: IEEE Press, 2011: 1626-1633.
[15] BRONSTEIN M M, KOKKINOS I. Scale-invariant heat kernel signatures for non-rigid shape recognition[C]// 2010 IEEE Computer Society Conference on Computer Vision and Pattern Recognition. Washington D.C., USA: IEEE Press, 2010: 1704-1711.
[16] LING H, JACOBS D W. Shape classification using the inner-distance[J]. IEEE Transactions on Pattern Analysis & Machine Intelligence, 2007, 29(2): 286-99.
[17] RUSU R B, BLODOW N, BEETZ M. Fast point feature histograms (FPFH) for 3D registration[C]// 2009 IEEE International Conference on Robotics and Automation. Washington D.C., USA: IEEE Press, 2009: 3212-3217.
[18] RUSU R B, BLODOW N, MARTON Z C, et al. Aligning point cloud views using persistent feature histograms[C]// 2008 IEEE/RSJ International Conference on Intelligent Robots and Systems. Washington D.C., USA: IEEE Press, 2008: 3384-3391.
[19] JAMPANI V, KIEFEL M, GEHLER P V. Learning sparse high dimensional filters: image filtering, dense CRFs and bilateral neural networks[C]// 2016 IEEE Conference on Computer Vision and Pattern Recognition (CVPR). Washington D.C., USA: IEEE Press, 2016:4452-4461.
[20] KOHONEN T. The self-organizing map[J]. Proceedings of the IEEE, 1990, 78(9): 1464-1480.
[21] 桂力,郑顺义,曹姝清,等.基于点云的非合作航天器位姿测量方法研究[J].上海航天(中英文),2016,33(6):122-128.
[22] 赵晨帆,王萍,邢冠培,等.卷积神经网络应用于雷达目标检测[J].导弹与航天运载技术,2020(6):84-90.
[23] GREGORY J. Game engine architecture[M]. 2nd ed. Boca Raton: CRC Press,2018: 447
Research on Structure Recognition of Spatial Non-cooperative Objects Based on Point Cloud Data
CHENPeiran1, ZHANGXiaolong2, LIUXiaofeng1, CAIGuoping1, WUYongjun1
(1.School of Naval Architecture, Ocean and Civil Engineering, Shanghai Jiao Tong University, Shanghai 200240, China; 2.Shanghai Academy of Spaceflight Technology, Shanghai 201109, China)
How to recognize the graspable structure of non-cooperative target surface from the sensor data is a problem to be solved in spatial non-cooperative capture tasks. In this paper, the performance of four neural network-based algorithms, i.e., PointNet, PointNet++, SPLATNet, and SO-Net, in satellite structure segmentation and recognition tasks is compared and analyzed with a satellite point cloud data set. In order to better test the algorithm performance, a training test data set is built based on the NASA online data set, and a fast point cloud data building method is proposed. With the proposed method, point cloud data can be generated in batches. The simulation results show that among the four neural network-based algorithms, PointNet++ has the highest segmentation accuracy on both satellite complete and incomplete point cloud data sets, and has the best segmentation effect.
spatial capture; non-cooperative target; satellite point cloud; deep neural network; structure identification
2021‑03‑02;
2021‑04‑29
国家自然科学基金(11772187,11802174)
陈霈然(1997—),男,硕士研究生,主要研究方向为航天器控制。
刘晓峰(1985—),男,博士,长聘教轨副教授,主要研究方向为航天器动力学与控制问题。
V 520
A
10.19328/j.cnki.2096⁃8655.2022.04.012
猜你喜欢
保定学院学报(2022年2期)2022-04-07
计算机研究与发展(2022年1期)2022-01-19
健康之家(2021年19期)2021-05-23
医学食疗与健康(2021年27期)2021-05-13
农业科技与信息(2021年2期)2021-03-27
健康体检与管理(2021年10期)2021-01-03
计算机应用(2020年12期)2020-12-31
炎黄地理(2018年11期)2019-01-24
数学学习与研究(2018年15期)2018-11-12
文苑(2015年9期)2015-09-10
