踏轮式下肢康复训练床人机模型的建立和仿真研究
2022-12-08 05:25韦海燕黄晓东邓盛深黄世玲
装备制造技术 2022年9期
韦海燕,黄晓东,邓盛深,黄世玲
(1.广西大学 机械工程学院,广西 南宁 530004;2.南宁学院 智能制造学院,广西 南宁 530200)
由于患病和运动等原因造成下肢运动障碍的患者日益增多[1],而对于国内外研发的下肢康复训练设备,主要依赖医生、康复治疗师的治疗手段和专业康复设备。其治疗费用高、移动麻烦、难以坚持[2],不适合患者长期、巩固地治疗,难以达到预期的治疗效果。有研究发现多数患者术后,关节功能的恢复需要较长时间,不利于患者的康复[3]。
要尽早恢复患者的下肢运动功能,需要提高患者下肢髋、膝及踝关节的活动度,改善髋、膝及踝关节的协调性与稳定性,同时能够不断刺激患者下肢肌肉群,缓解病人下肢肌肉萎缩和获得性肌无力的发生,利于病人早期逐步恢复站立行走的能力[4]。但使用传统的下肢康复机器人时,患者下肢通过绑带与机器人下肢外骨骼固定,被采用悬吊的方式进行康复训练,易导致患者血液循环流动不顺畅,影响下肢功能的恢复。为解决上述问题,同时便于居家康复训练,又能便于患者的移动,故设计了可进行康复训练的踏轮式下肢康复训练床。
1 下肢康复训练床的设计
根据患者需求在安全、平稳的状态下完成康复训练,下肢康复训练床的设计遵循人化、物化及环境原则[5],实现坐卧、斜躺及站立的多位姿功能。下肢康复训练床由床体和踏轮组成,结构如图1所示。
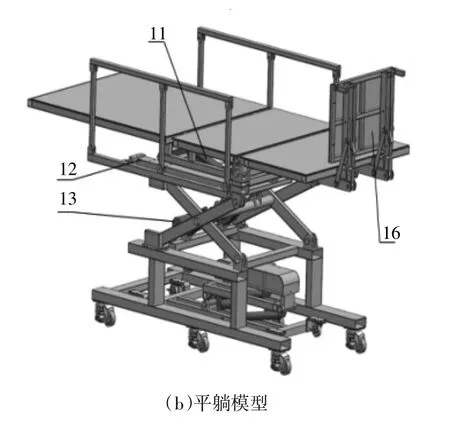
图1 下肢康复训练床三维模型
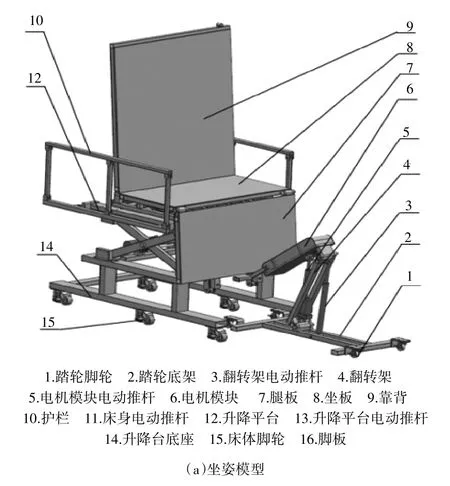
踏轮整体则采用“电动推杆+脚踏轮”的方式,踏轮包括翻转机构和电机模块动力源,采用电机驱动方式。床体包括床身和升降机构,其中床身分别由靠背、坐板、腿板、脚板构成;升降机构分别由剪叉式升降机构和底座构成。下肢康复训练床踏轮机构是负责踏轮式运动训练的主要机构,由踏轮翻转机构与电机模块组成。实现不同的训练模式需要的转速与扭矩,选择响应快、控制精度高和稳定性好的直流伺服电机作为踏轮的输出动力源。
考虑满足大部分患者康复训练的舒适性,踏轮翻转机构选择二级翻转机构,如图2,可改变踏轮轴心位置来适应不同身高和腿长的患者不同位姿康复训练,机构所占的空间尺寸最小,水平长度较小。
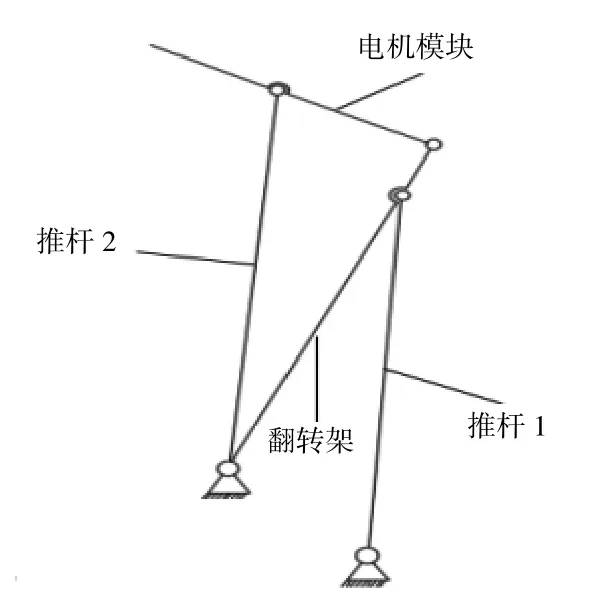
图2 二级翻转机构翻转后
2 下肢康复训练床参数的确定
下肢康复训练床床体与踏轮相互配合,脚踏轮通过电动推杆进行升降,患者可根据自身康复情况选择坐姿或斜躺进行踏轮康复训练。
结合成年人人体惯性参数和中国成年人人体尺寸以及床体2000 mm×880 mm的尺寸,确定下肢康复训练床各板块的尺寸,床身及脚踏轮尺寸见表1。
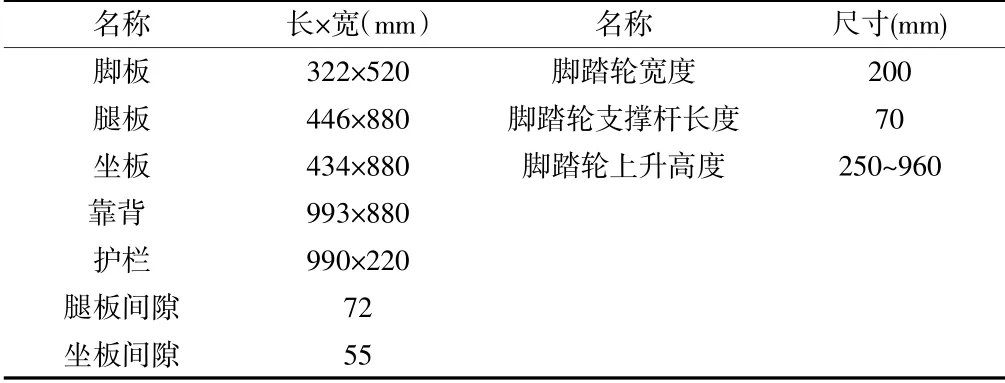
表1 床身及脚踏轮尺寸
3 人机模型的建立
3.1 坐卧姿人机模型
根据下肢康复训练床的设计目标,建立如图3的坐卧姿人机模型和直角坐标系。其中,未设置站立人机模型,坐姿与坐卧姿共用一个人机模型。图3中点A、B、C处分别为人体的髋、膝、踝关节点;D点为踏轮转动轴中心;E点为电机模块推杆与电机模块的铰接点;F点为电机模块与翻转架的铰接点;G点为翻转架与底座的铰接点;H点为翻转架推杆与底座的铰接点;h为髋关节到地面的高度;l为O点与踏轮G点的距离;a为大腿的长度;b为小腿的长度;c为脚踏撑杆的长度;d为A、D两点间的长度;e为电机模块的长度;α为髋关节与x轴的夹角;β为膝关节与X轴的夹角;γ为脚踏撑杆与X轴的夹角;δ为电机模块的翻转角度;ε为翻转架与x轴的夹角;同时设θ为d与X轴的夹角。其中h′为髋关节与踏轮转动轴的Y方向上的投影距离,l′为髋关节与踏轮转动轴的X方向上的投影距离。
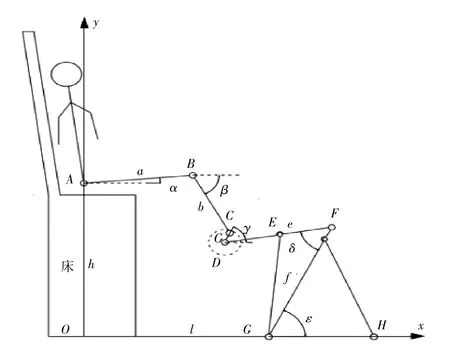
图3 坐卧姿人机模型
图3中人的下肢与踏轮组成四杆机构,即杆AB、BC、CD、AD。采用解析法分析其运动规律,在四杆机构ABCD中,根据图中的坐标和杆的矢量方向,将各杆分别在X、Y轴上投影得:

(1)关节角度分析
将式(1)、式(2)两式移项,平方相加消去β整理得:
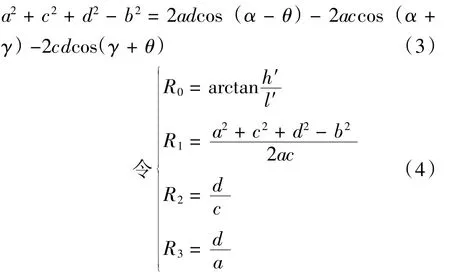
将式(4)代入式(3)得:

将式(1)、式(2)两式移项,平方相加消去α整理得:

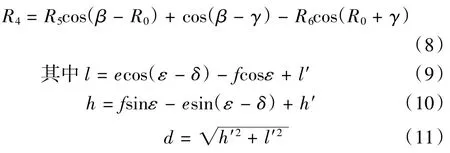
将式(7)代入式(6)得:
髋关节角度:

膝关节角度:

(2)关节角速度分析
式(5)和式(12)对时间t求导,联立得髋关节角速度:

式(8)和式(13)对时间t求导,联立得膝关节角速度:(3)关节角加速度分析

式(14)对时间t求导得髋关节角加速度:
式(15)对时间t求导得膝关节角加速度:
式(5)和式(8)分别为坐姿下肢髋关节角度与膝关节角度的方程;式(14)和式(15)分别为髋关节角速度与膝关节角速度的方程;式(16)和式(17)分别为髋关节角加速度与膝关节角加速度的方程。式中R1、R2、R3、R4、R5、R6、l、h为待定参数。从上述方程式可知,髋关节角度、膝关节角度、髋关节角速度、膝关节角速度、髋关节角加速度、膝关节角加速度是关于a、b、c、l、h、δ、ε、γ的函数,这些参数变化会引起方程数值的变化。
3.2 斜躺人机模型
根据下肢康复训练床的设计目标,建立如图4的斜躺人机模型,并建立直角坐标系。其中,斜躺的人机模型亦可适用于平躺的分析。图中A′点为床身电动推杆下端铰接点,B′点为床身与升降平台的铰接点,C′点为床身电动推杆上端铰接点,i为A′B′的水平距离,j为床身与升降平台的高度差,k为B′C′的长度,s为床身电动推杆的长度,μ为床身与X轴的夹角,θ为电动推杆与X轴的夹角。
根据图4坐标系,杆B′C′、A′C′及A′和B′两点的连线A′B′为封闭矢量,采用解析法分析其运动规律,将杆分别投影到x、y坐标轴上得:
图4 斜躺人机模型


式(20)为床身的位置方程,床身翻转的角度μ是关于s的函数,s的变化会引起床身翻转角度的变化。
4 人-机融合模型运动学仿真
结合MATLAB-ADAMS两个软件的优势,在ADAMS中建立虚拟样机模型,并将控制平台建立在MATLAB/Simulink中来进行联合仿真试验,探索人体下肢关节的运动规律来验证人体在下肢康复训练床上训练时下肢关节角度的变化量是否在正常范围内,并找出影响关节角度的因素,分析踏轮式下肢康复机器人的人机相容性和人机舒适性[6]。
4.1 建立人机仿真模型
在ADAMS中建立人机下肢的简化模型,如图5所示,其中关键构件和人体部位包括:支撑杆、翻转架、电机模块、大腿、小腿。
图5 下肢仿真模型
4.2 制定人机模型仿真方案
由式(5)和式(8)可知,在进行康复训练时,影响髋关节和膝关节角度变化的因素有大腿长度a,小腿长度b,床的高度h,踏轮电机翻转角度δ,A点到G点在x轴方向上的投影距离l。如果试验取5个变量,每个变量选取3个不相等的值,则需要进行35=243次试验。为了减少工作量,同时又不对结果产生影响,采用正交试验设计[7]。因患者的大腿长度和小腿长度会成组变化,所以视为一个变量,床的高度已定,踏轮撑杆已定ε角已定。有2个变量,每个变量取3组不同的值,则需要做32=9次仿真试验。试验中有试验指标和试验因素,即衡量试验效果的特征量和影响试验指标的因素。
(1)试验指标:大腿转过的角度和小腿转过的角度,角速度和角加速度。
(2)试验因素:踏轮电机翻转角度δ,髋关节到G点x轴的投影距离l。
(3)试验水平:踏轮电机翻转角度δ分别为45°、60°、75°,髋关节A点到G点关于x轴的投影距离l分别为635 mm、685 mm、735 mm。
(4)正交表可以写成L(a32),L表示正交表,a表示正交表的行数,32表示3水平的因素有2个,则因素水平表和仿真方案表分别见表2、表3。
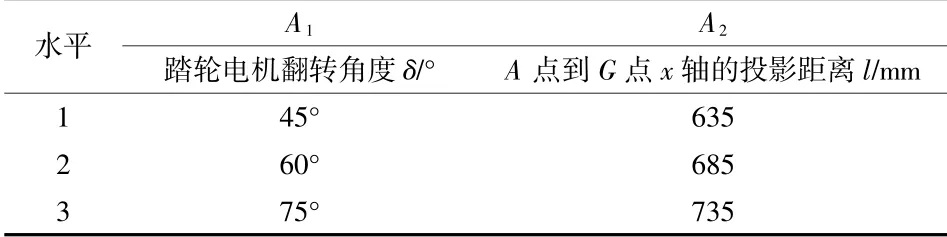
表2 因素水平

表3 仿真方案
选取男性K95、女性K5的值进行试验,分别用1.和2.表示。其中脚踏撑杆的长度C=70 mm,髋关节到地面的高度h男K95=700.50 mm,h女K5=681.50 mm。
4.3 人-机融合模型仿真试验结果与分析
在模型处添加驱动,设置角速度为30度每秒,脚踏转一周需要12 s,仿真步数为120步,每次仿真完成后,按照表的数据修改模型构件的位置,再次进行仿真。
4.3.1 关节角度分析
按照人体坐姿状态下肢关节活动度角度定位,髋关节和膝关节角度仿真结果分别如图6、图7所示。
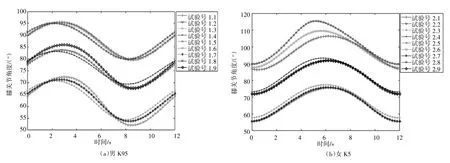
图6 髋关节角度变化规律
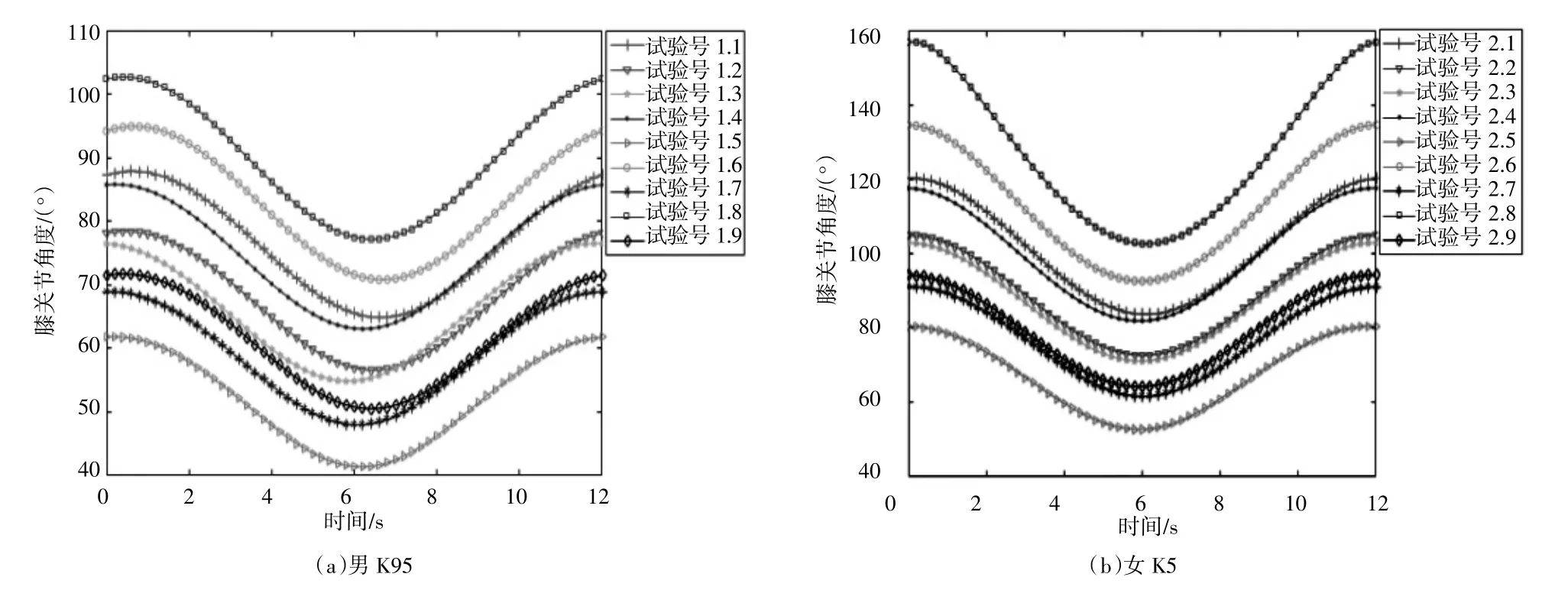
图7 膝关节角度变化规律
从图6和图7可得:膝关节和髋关节的角度都成周期性变化。由图6可得,髋关节的角度都是先增大再减小,电机在同一翻转角度δ,髋关节的角度随着距离的增大而增大;在同一距离l条件下,髋关节的角度随着翻转角度的增大而减小。
由图7可得,在同一角度δ条件下,膝关节的角度也随着距离的增大而增大;在同一距离l条件下,膝关节的角度随着距离的增大而减小。腿长较长的人体,膝关节角度先减小后增大。腿长较短的人体,膝关节角度先增大后减小,且出现相对较大的角度。为进一步分析仿真结果,了解髋关节和膝关节角度是否符合坐姿的角度调节范围,对仿真数据结果中的关节角度进行汇总,如表4所示。
由前面可知坐姿人体关节活动范围髋关节:65°~120°,膝关节75°~180°。从表4可得:试验号1.3、1.5、1.7、2.3、2.5、2.7的髋关节和膝关节的角度都不在坐姿人体关节角度范围内。试验号1.1、1.2、1.4、1.9、2.2、2.9的膝关节角度不在坐姿人体关节角度范围内。以上说明在坐姿状态下,电机翻转的角度过大时,改变人与踏轮的水平的距离会影响坐姿人体的正常康复训练。试验号1.6、1.8、2.1、2.6、2.8中的踏轮电机翻转角度都是相同值,说明电机模块的翻转角度δ在一定范围内,增加人体的髋关节与踏轮的水平距离l能使人体的关节角度处于正常范围内。但对于髋关节和膝关节比较脆弱的患者,关节活动范围不宜过大,所以在人体的髋关节与踏轮的水平距离l一定时,建议选用小的角度即δ=45°。这样患者在进行康复训练时,髋关节和膝关节的活动度较小,符合下肢康复训练关节的允许变化范围。
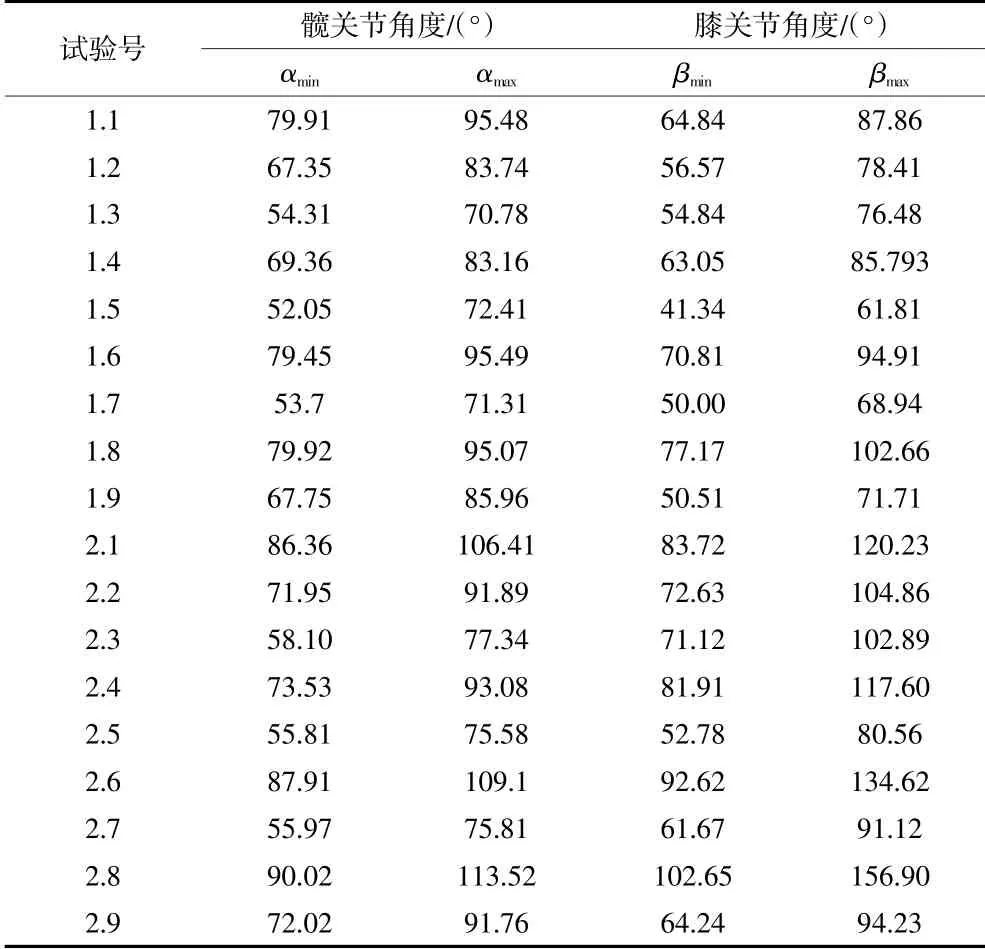
表4 关节角度
4.3.2 关节角速度与角加速度分析
男性K95的髋关节、膝关节角速度曲线、角加速度曲线分别如图8、图9所示。
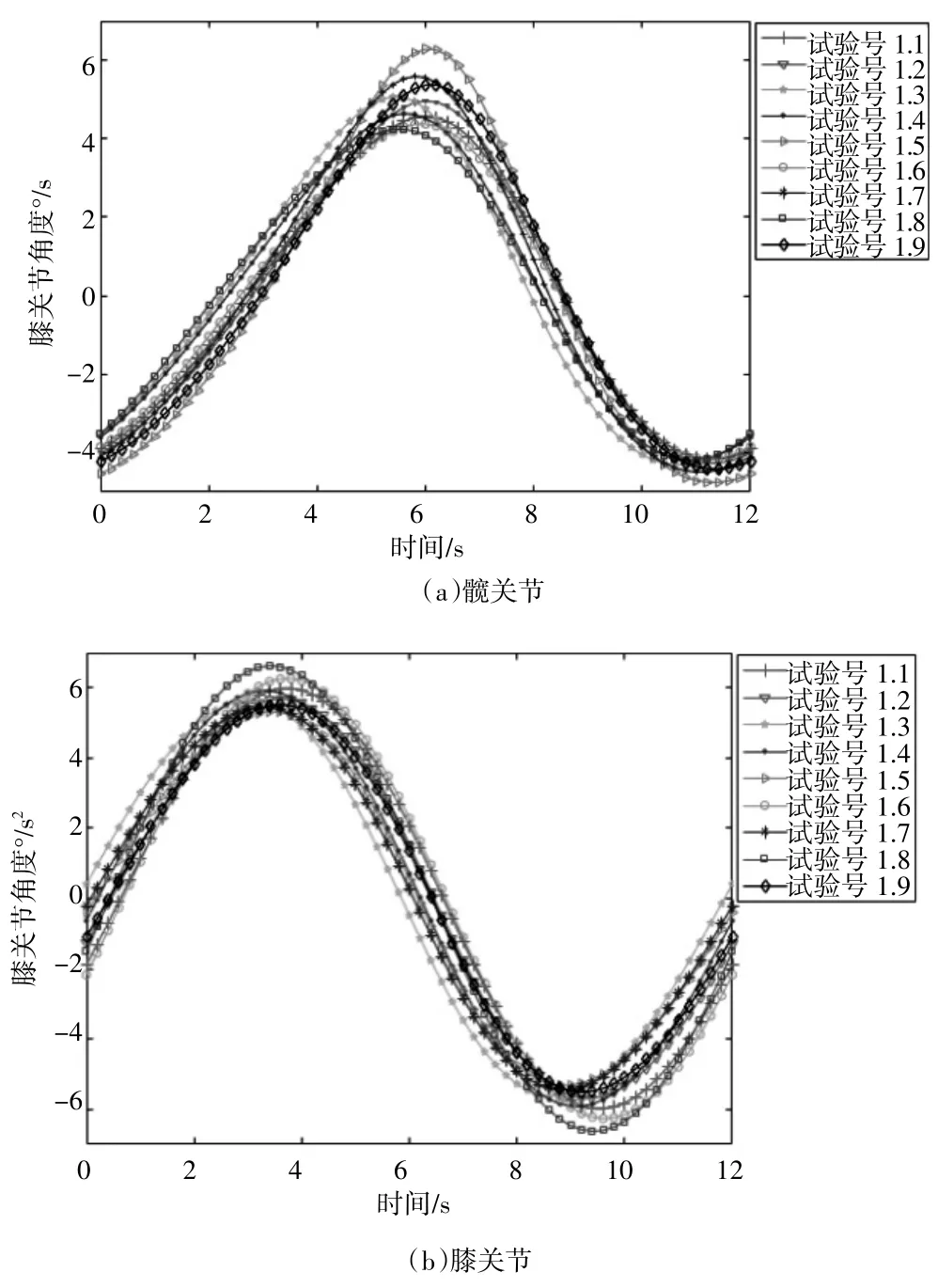
图8 关节角速度
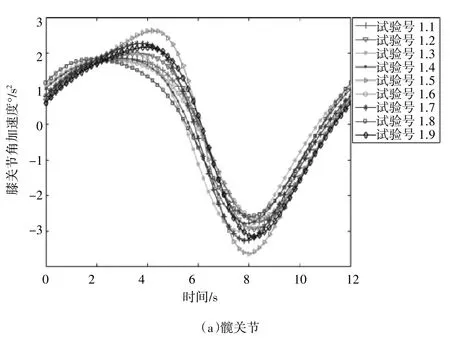
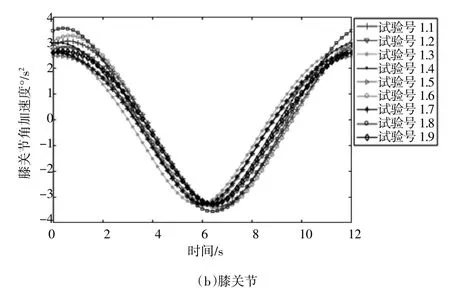
图9 关节角加速度t
从图6和图7可得,同种颜色的髋关节与膝关节的角度曲线走势相同,所以角速度与角加速度相近,只需要分析一种腿长的关节角速度与角加速度曲线。
由图8(a)可知,不同的因素条件下,关节的角速度变化不同,其中试验号1.8髋关节的角速度最大,试验号1.5髋关节的角速度最小,试验号1.7与试验号1.9髋关节角速度变化趋势相接近,试验号1.2与试验号1.3髋关节角速度变化趋势也相接近。由图8(b)可知,试验号1.8膝关节的角速度最大,试验号1.5膝关节的角速度最小,其他试验号角速度相差不大,而且变化走势相近。
由图9(a)可知,不同因素条件下,髋关节的角加速度的变化走势相同,试验号1.8膝关节的角加速度变化最大,试验号1.5膝关节的角速度变化最小,其他试验号角速度变化相差不大。由图9(b)可知,试验号1.8膝关节的角速度变化最大,试验号1.5膝关节的角速度变化最小,试验号1.1、试验号1.3、试验号1.4角加速度曲线变化相近。
试验号1.8的髋关节角加速度小,但膝关节的角加速度大;试验号1.5膝关节角加速度小,但髋关节角加速度大。两者任一角加速度过大不利于病人平缓康复的要求,其中试验号1.4髋关节角度与膝关节角加速度组合相对较小,结合方案表3,可选取l=735 mm作为踏轮与床体之间的适宜距离。
5 结论
(1)本研究探索患者对下肢康复训练的需求,设计智能康复训练床,其结构设计主要由床体和踏轮2个部分组成,患者可采用多位姿的康复训练模式,从人机相容性和人机舒适性出发,建立坐卧和斜躺的人机模型并加以分析。
(2)在ADAMS中建立人机下肢的简化模型,制定人机模型仿真方案,运用正交试验法进行人-机融合模型仿真试验。结果表明:在坐姿状态下,电机翻转的角度过大时,改变人与踏轮的水平距离会影响坐姿人体的正常康复训练。电机模块的翻转角度δ在一定范围内,增大人体的髋关节与踏轮的水平距离l能使人体的关节角度处于正常范围内。但对于髋关节和膝关节比较脆弱的患者,关节活动范围不宜过大,所以在人体的髋关节与踏轮的水平距离l一定时,建议选用小的角度即δ=45°,使得患者康复训练时的髋关节和膝关节的活动度符合下肢康复训练关节的允许变化范围。
(3)研究结果表明:患者康复训练过程的髋关节、膝关节角加速度不应过大,综合方案踏轮与床体之间的适宜距离可选取l=735 mm。
猜你喜欢
青少年科技博览(中学版)(2022年6期)2022-08-31
南都周刊(2021年3期)2021-04-22
液压与气动(2020年4期)2020-04-10
新课程·下旬(2018年10期)2018-01-28
科学与财富(2018年34期)2018-01-15
中学生数理化·高一版(2017年3期)2017-07-08
海外星云(2016年7期)2016-12-01
太空探索(2016年5期)2016-07-12
火控雷达技术(2016年1期)2016-02-06
中国铁道科学(2015年4期)2015-06-21