基于机器视觉的水上救援装置设计
2022-12-08 05:25赵泽鑫高兴宇冯钊杰陈以石马诗晏
装备制造技术 2022年9期
赵泽鑫,丁 畅,高兴宇,冯钊杰,陈以石,马诗晏
(桂林电子科技大学 机电工程学院,广西 桂林 541004)
0 引言
近年来,由于暴雨、风暴潮等自然因素引起江河湖海的水量急剧增长,多处区域频发洪水,而且随着人类在水域上活动的增加,如何进行高效、可靠的抗险救援已经成为重要的研究课题。目前,发达国家水上救援已经从救援绳、救生圈等简单装备发展到水上救援转运系统[1],如专用救生艇、无人机[2]、水上救援机器人[3]等先进设备。随着发达国家水上救援装备更新换代,水上救援效果也不断得到检验。目前现代的水上救援活动已经不能离开先进救援装备,救援装备更是不断向无人化、信息化、智能化方向发展,如水上无人机、无人巡视系统及水上救援机器人等。中国从1949年新中国成立以来,水上救援发展至今仍未能摆脱技术落后、研发规划不充足、研发人才短缺等问题[4]。当前,赵嘉厚等[5]提出了基于物联网的伺服式近岸水上救援系统,该系统通过救援手环、伺服救援装置以及管理监护终端组成,但该救援装置没有图像的自动识别功能。熊林林等[6]提出一种新型水上救援抛投弹的设计方法,通过空中抛投的方式进行水上救援,该设计思路具备救援及时的优势,但对落水人员的定位精度及救援的可靠性欠佳。裴林等[2]提出的旋翼无人机水上救援方案时效性强,但靠近和救起的可靠性不能保证。综上,提升水上救援装置的高可靠性、大负载能力、长时间续航里程是关键技术,当前的国内研究无论从机械结构还是技术方案层面都缺乏较为系统而完整的设计。
本研究重点关注了水上待救援目标的自动化识别与救援的问题,提出一种基于机器视觉的水上救援装置设计方案,设计有水上图像数据信息实时采集、传输与处理的功能,设计有图像传感器与控制电路的协同机制,兼顾了水上救援的时效性与可靠性。
1 装置的总体设计
该装置由总控系统、摄像头、推进器、机械臂、传送装置五个部分组成,装置整体如图1所示。其中总控系统由电源模块、图像处理模块、微控制器、电机驱动器四部分组成,其中,电源模块与图像处理模块是总控系统中最为重要且复杂的部分。
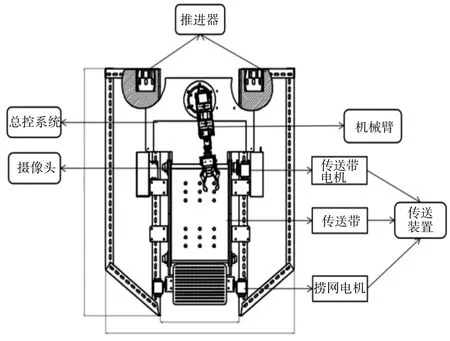
图1 装置整体
传送装置如图2所示,包括传送带电机、传送带与捞网。其中传送带所使用的材料为强力型尼龙片基带,采用带网孔设计,在被落水人员传送时将被救人员身上滴下的液体经由网孔带出装置,防止传送带表面打滑。在救援过程中,对有自主意识的落水人员,捞网电机会将捞网下降至水平面,落实人员可爬上捞网由传送带回到总控系统上的救生平台;对于已无自主意识的落水人员,救援装置会根据落水人员在摄像区域的坐标进行位置调整,使装置正对落水人员,此时捞网电机会将捞网降低至落水人员身下,接着升起捞网将落水人员轻轻放置在传送带上,传送带将其运送至救生平台。
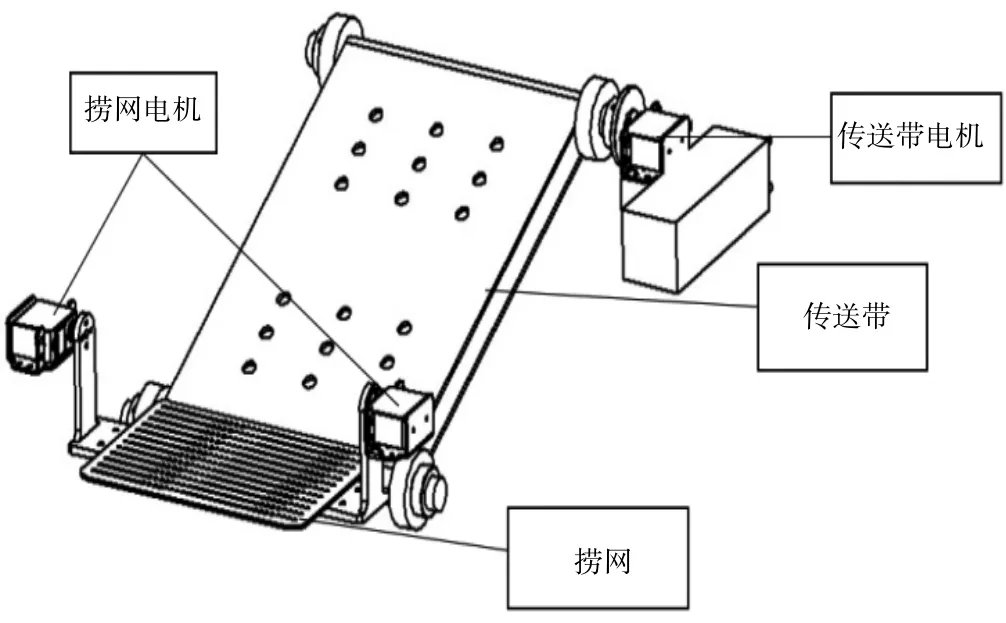
图2 传送装置设计方案
2 装置的总控系统设计
2.1 电源模块
电源模块分为两部分,第一部分使用TPS54302-DDCR电源芯片将直流24 V转为直流5 V,并以此电压作为摄像头以及图像处理器的供电电压,此电路具有反馈控制关断的特点,当反馈电压出现变化即降压后的直流5 V发生变化时,电源芯片会及时关断从而对其所供电的外设起到保护的作用,该电路图如图3所示,图3中的Uin1=24 V,Uout1=5 V;第二部分使用TLV62569电源芯片将电源模块第一部分降压后的直流5 V降压成直流3.3 V,并以此电压为微控制器供电电压,该电源芯片为开关电源芯片,当反馈电压即微控制器供电电压发生改变时,该电源芯片会及时关断从而达到对微控制器的实时保护,其电路如图4所示。图4中Uin2=Uout1=5V,Uout2=3.3V。
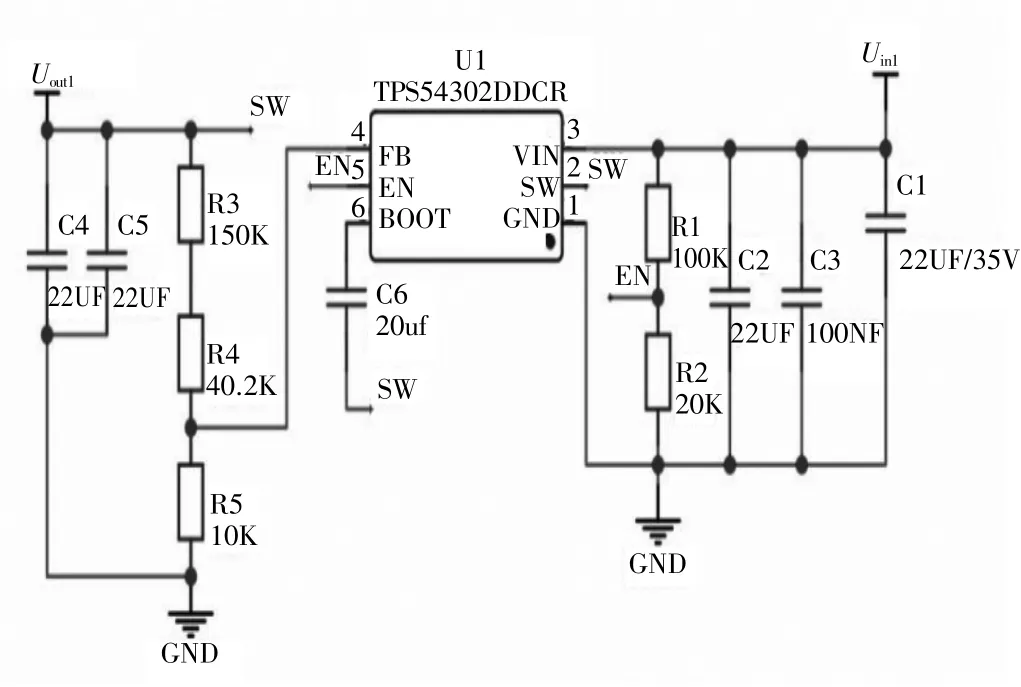
图3 24 V转5 V电路
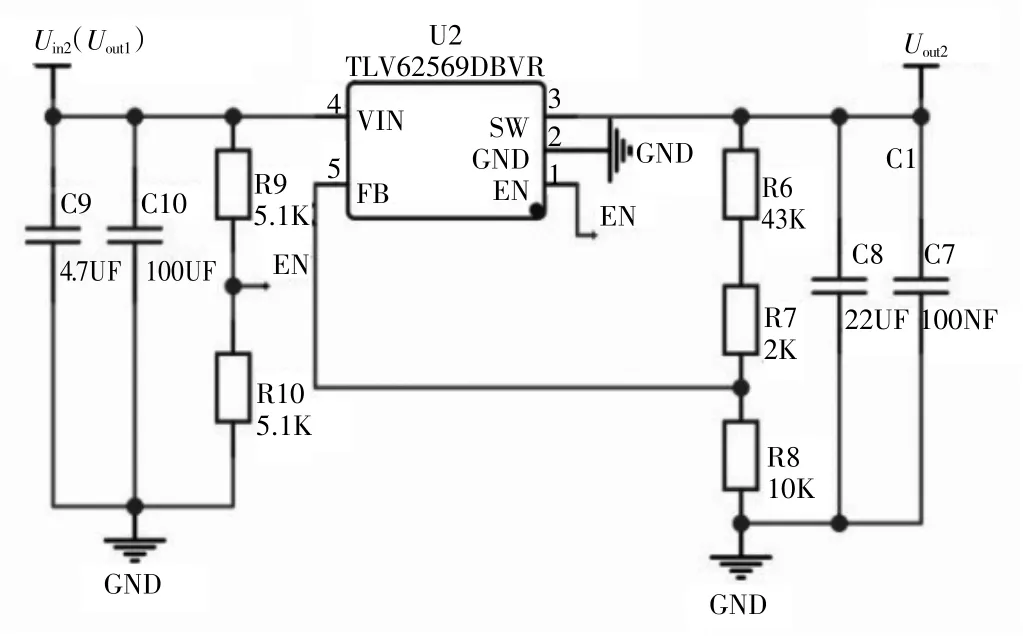
图4 5 V转3.3 V电路
在24 V转5 V电路设计中,采用的降压芯片为TPS54302。TPS54302是一款容压差较高的降压转换器[7],有效电压输入范围为4.5 V~28 V,其最大输出电流可达3 A。该芯片包含2个集成开关MOS并且拥有内部回路补偿。TPS54302芯片的各管脚功能如下:
(1)GND功能:低侧NFET的接地引脚、源极端子以及控制器电路的接地端子。
(2)SW功能:高侧NFET和低侧NFET之间的开关节点连接。
(3)VIN功能:输入电压电源引脚。
(4)FB功能:转换器反馈输入。
(5)EN功能:使能引脚。
(6)BOOT功能:高侧NFET栅极驱动电路电源输入
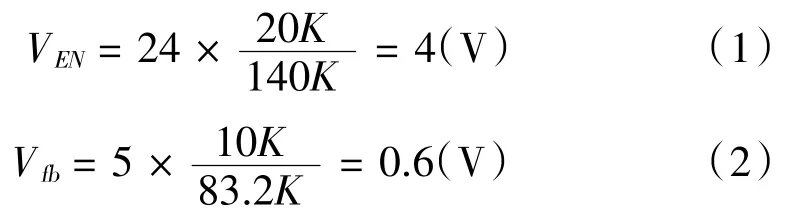
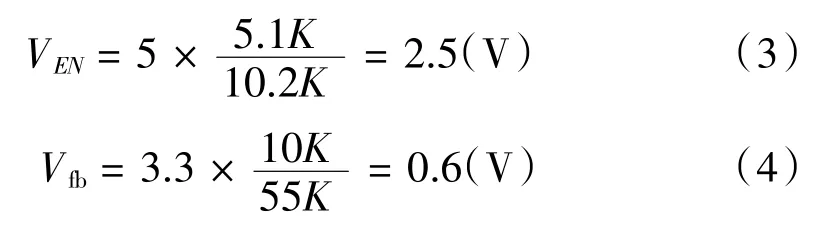
根据TPS54302数据手册,如需开启此芯片且输出5 V电压,必须使得使能电压大于1.2 V,且其反馈电压Vfb等于0.6 V,在本电路中开启电压VEN计算式、反馈电压Vfb计算结果分别为:
在5 V转3.3 V电路设计中,所用到的电源芯片为TLV62569。TLV62569是一款DC-DC同步电压转换器。TLV62569最大输出电流可达2 A。TLV62569芯片的各管脚功能如下所示:
(1)EN功能:使能引脚。
(2)GND功能:低侧NFET的接地引脚、源极端子以及控制器电路的接地端子。
(3)SW功能:高侧NFET和低侧NFET之间的开关节点连接。
(4)VIN功能:输入电压电源引脚。
(5)FB功能:转换器反馈输入。
在大负载条件下,TLV62569能够自动工作在PWM工作模式下;在小负荷状况下,该芯片自行开启节能模式。因此该芯片得以保证在所有负荷电流范围内一直保持着高效的工作状态。另外,在其外部需要增加一个滑动变阻器,通过调整滑动变阻器的阻值进而起到调整输出电压信号的作用。该电源控制器芯片内部结构具有软启动电路可限制晶片在开启期间产生的浪涌电流[8]。
根据TLV62569数据手册,如需开启此芯片且输出3.3 V电压,则需要满足其使能开启电压大于1.2 V,且反馈电压Vfb等于0.6 V。
在本电路设计中,其使能开启电压VEN与反馈电压Vfb的计算公式、结果分别为式(3)和式(4)
2.2 图像处理器
该装置搭载的图像处理器为STM32H743II处理器,图像处理器外接一个高清摄像头以保证采集图像的清晰度,STM32H743II主时钟频率可达到480 MHz,可以实现快速进行图像实时处理,保证救援的时效性;一个SPI总线传输数据时,可以达到100 Mbs的速度,允许将图像流数据[9]传送至LCD显示屏与微控制器,便于查看被救人员当前的状态,且该处理器带有红外热成像模组,便于夜间进行救援工作。
处理器以开发板形式置于装置。开发板使用模块+底板的设计方式,具有整洁、小巧的特点,板载Type-C接口和USB-UART电路,可以直接通过USB Type-C线连接电脑进行开发,配置128Mbit Flash、LCD、DVP、Micro SD卡等接口,功能十分强大,能够更好地支持水上救援装置进行快速的图像处理运算。
该图像处理器内含的算法是基于R-CNN的目标检测算法,以水上救援模型使用的图像处理器为例,整体工作流程如图5所示。
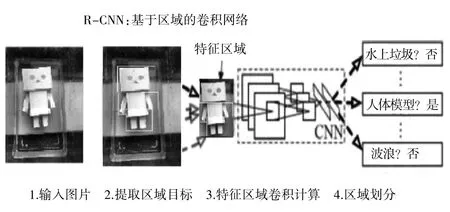
图5 R-CNN目标检测流程
图像处理器实时采集摄像头回传的数据,通过选择性搜索的方法大致生成2000个候选区域,每个候选区域都会被调整成固定大小(227像素×227像素)的图像并入1个CNN[10]模型中,通过5个卷积层和2个全连接层进行前向传播,最后得到1个4096维度特征向量,被送入1个多类别SVM分类器中,通过快速分析处理从而预测出候选区域中所含物体的属于每个类的概率值。当预测检测目标属于人体的概率达到设定值时,图形处理器会发送特定命令识别语句至微控制器,经由微控制器判断后对其他外设做出相应命令,从而达到救援的目的。上述中预测目标概率在本方案设计中,阈值默认为0.8。当阈值小于0.8时,图像中形似人体的信息会对处理器分析产生干扰;当阈值大于0.8时,处理器会丢失掉一些较为模糊的人体目标;实验结果证明,当阈值取为0.8时较为合理,处理器的分析效果最佳。
2.3 系统控制原理
该装置的总控系统采用意法半导体公司生产的STM32F407VGT6芯片作为核心控制器。总体控制原理如图6所示。其中的STM32F407VGT6型号芯片是基于ARMCortex-M3内核的32位微控制器。其时钟频率为72 MHz,便于快速处理分析摄像头回传数据,保证救援的时效性,该芯片多达112个快速I/O端口,满足了总控系统下接多外设的需求,其内置闪存程序存储器和512 K容量的FLASH及64 K容量的SRAM,便于存储水上救援的实时画面。
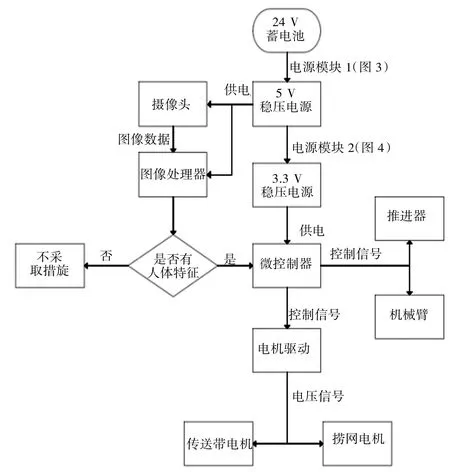
图6 系统控制原理
该装置在工作过程中摄像头实时回传所拍图像,经由图像处理器分析处理后回传至微控制器,由微控制器进行判断,如识别到需要进行救援的对象,处理器会发送信号至下接外设,从而对落水人员进行救援。
为验证装置可靠性,对装置总体性能进行了1次实验。在本次实验中,利用3D打印的人体模型代替落水人员。首先将该救援装置放入湖中,启动装置,装置进入巡航模式如图7(a),接着将人体模型抛入湖中,装置发现落水疑似目标并向其驶进,在靠近疑似目标后,利用装置搭载的机械臂将摄像头推进至疑似目标前方,由摄像头将目标及附近图像传送至图像处理器,经过图像处理器的快速处理分析得到疑似目标为落水人员的结果并且返回落水人员在图像中的坐标值,总控系统接收到结果后配合图像处理器返回的坐标值对装置整体进行细微调节从而使得落水人员处于捞网正中央,细调结束后,装置启动捞网与传送带如图7(b),落水人员通过传送带传送至装置的救生平台,最后装置返航,将落水人员运送至湖边,至此实验结束。在本次实验中,装置巡航以及返航共用时23 s,目标识别以及装置位置细微调节用时2 s(目标识别用时1 s不到),利用捞网以及传送带将落水人员传送至救生平台用时15 s,整个救援过程用时仅40 s,实验结果表明,该装置稳定性好,且功能效果突出。
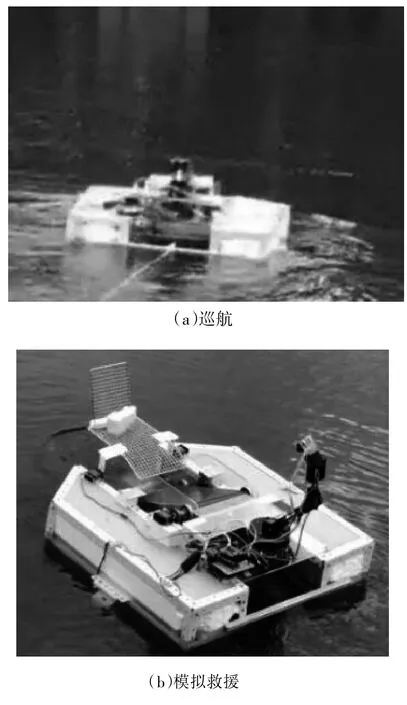
图7 装置工作
3 结语
本文针对传统水上救援装置存在的缺点设计了一种基于机器视觉的水上救援装置,该装置具有控制系统完善、环境适应性强、续航能力强以及功耗低的特点,综上所述该装置模型满足了水上救援的需求,对提高水上应急救援数字化、集成化、智能化有一定的借鉴意义,且具有较高的应用价值。
猜你喜欢
中学生数理化·高一版(2021年1期)2021-03-19
电子制作(2017年14期)2017-12-18
中学教学参考·理科版(2016年11期)2017-06-08
电子设计工程(2015年12期)2015-02-27
汽车零部件(2014年1期)2014-09-21
单片机与嵌入式系统应用(2014年8期)2014-03-23
单片机与嵌入式系统应用(2014年9期)2014-03-11
电子设计工程(2014年18期)2014-02-27
物理通报(2012年1期)2012-03-20
电子设计应用(2004年7期)2004-09-02