
基于虚拟样机的汽车冗余转向系统联合仿真
2022-12-08 12:10杨文志
汽车工程 2022年11期
张 博,杨文志,芦 勇
(1.清华大学车辆与运载学院,北京 100084;2.东华大学机械工程学院,上海 201620;3.上汽创新研发总院,上海 201799)
前言
近年来由转向系统控制单元故障带来的车辆事故问题日益突出,而随着智能驾驶技术的发展,人们对转向系统安全性的需求却不断提高,冗余转向系统以其高效、可靠性高等优势成为新的研究热点。冗余转向系统对传感器、控制单元(electronic control unit,ECU)等电子元器件进行冗余,避免转向时某个部件发生故障而导致转向失效的现象发生[1],确保转向系统的足够安全。
我国对冗余转向系统的开发还处于起步阶段。由于其机械部分和控制部分都较为复杂,利用计算机建立虚拟系统样机,进行各方案的分析优化和控制策略的设计,可以大大缩短研发周期,减少不必要的人力物力消耗[2]。现有对转向系统的仿真研究主要集中在单一的机械模型仿真或基于Simulink的控制仿真[3-6],两者之间交互不足,不能完整模拟转向过程。路怀华等[4]通过有限元分析软件对转向系统机械总成进行模态分析,并基于响应面法对灵敏度较大的零件进行分析优化,不仅降低了试验时人为造成的测量误差,也缩短了优化设计时间。刘芳等[5]基于ADAMS建立了精细化的转向系统机械模型,完成了对转向系统的助力特性分析,并通过试验验证了该仿真模型的准确性,但该模型是在理想的助力控制下完成的,没有考虑到控制系统对助力电机的控制效果。刘亚辉和季学武[6]在AMESim仿真软件中建立了15自由度的车辆模型,利用该模型测量出不同车速下、不同转向盘转角时的转向阻力,进而得到了可变化的转向助力曲线。Huang等[7]提出了一种滑模控制算法,基于Simulink建立了转向系统的控制模型并进行仿真,改善了双电机转速不同步的问题,转向系统的控制性能得到验证和优化。商显赫等[8]基于Simulink建立了包含机械模型、2自由度车辆模型和控制器模型的转向系统模型,验证了所设计控制策略具有超调量小、稳定性高的控制效果,但通过Simulink建立的转向系统机械模型参数复杂、计算过于繁琐,不能模拟实际转向时零件的运动状态。上述工作的研究对象多为电动助力转向系统,目前对冗余转向系统的仿真研究较少。
本文中将综合考虑转向系统的机械部分和控制部分,建立联合冗余转向系统动力学模型和控制模型的仿真模型,基于该模型进行仿真分析。首先依据齿轮齿条动力学理论推导齿轮齿条的动力学方程;然后基于Simulink建立冗余转向系统的控制模型;其次,利用ADAMS软件创建转向系统齿轮齿条的模型并进行运动学仿真,联立两个模型构成完整的冗余转向系统,对转向器的转向性能进行仿真分析。最后,通过转向器台架试验验证,所设计的冗余转向系统能够满足车辆的助力需求,且在部分控制回路出现故障时仍可以提供一半的助力协助驾驶员进行紧急转向,联合仿真方法的分析结果具有较高的准确性,有利于今后对冗余转向系统的设计开发。
1 冗余转向系统工作原理
如图1所示,冗余转向系统由齿轮齿条传动机构、蜗轮蜗杆减速机构、六相电机、ECU和转矩传感器构成。
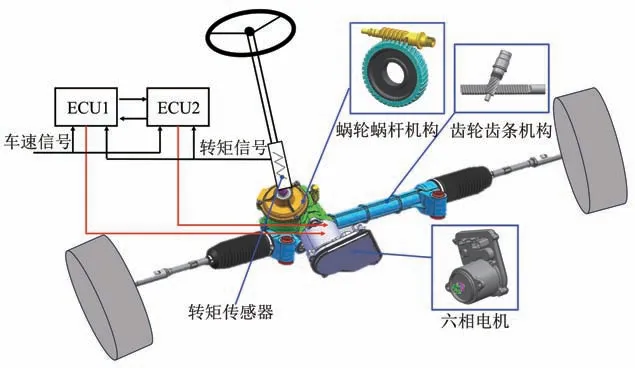
图1 冗余转向系统总体结构
车辆行驶过程中,驾驶员操纵转向盘转向时,两个ECU同时接受转矩传感器的转矩信号和车速传感器的车速信号后,分别产生目标电流,共同控制六相电机输出相应助力矩,电机输出的助力矩经过减速机构的增力矩作用后和转向盘力矩共同驱动转向齿轮,带动齿条横向运动实现转向。相对于传统的电动助力转向系统,冗余转向系统在单独控制回路中元器件出现故障时,另一条回路保持原来电流,控制助力电机输出相应助力矩,从而实现转向系统的安全可靠。
冗余转向系统控制部分的核心是ECU针对不同的车速信号和转向盘转矩信号根据所设计的助力特性曲线确定目标电流,并利用PID控制器调节目标电流控制助力电机。冗余转向系统的机械部分也会对转向造成不同的影响,如齿轮齿条传动机构参数的选择、摩擦因数等都会影响转向结果。因此,无论是对冗余转向系统控制部分的仿真还是对机械部分的仿真都不能完整模拟整个系统的转向过程。故本文选择ADAMS∕Simulink联合仿真的方法对冗余转向系统的助力性能进行分析。
2 转向系统运动学仿真
2.1 齿轮齿条动力学方程的建立
如图2所示,对齿轮齿条传动系统建立动力学模型[9]。其中齿轮为主动件;J为齿轮的转动惯量;r为齿轮基圆半径;e为轮齿齿廓误差;齿条质量为m;T、T1分别为作用在齿轮的力矩、地面对齿条的阻力;齿轮齿条啮合时,啮合刚度为kv;啮合阻尼系数为cv;齿轮转动θ角度时,齿条移动距离为s。
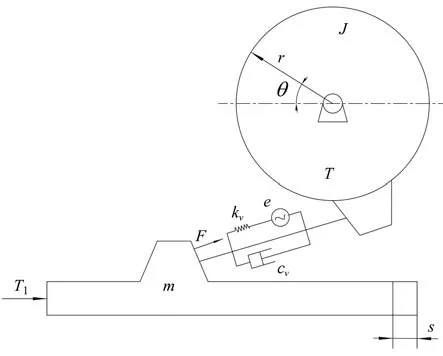
图2 齿轮齿条啮合动力学模型[9]
齿轮齿条接触时法向力[9]为

齿轮齿条传动系统的力矩平衡方程[9]为

整理可得齿轮齿条啮合的动力学方程[9]为
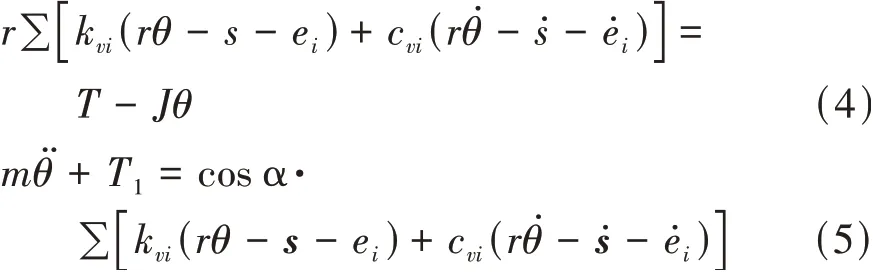
式中:ei为第i对啮合齿的齿廓误差;kvi为第i对啮合齿的啮合刚度;cvi为第i对啮合齿的啮合阻尼系数。
2.2 齿轮齿条运动学仿真
本文所设计冗余转向系统中齿轮齿条参数如表1所示,齿条选用的材料为37CrS4KL,采用调质处理;齿轮轴选用的材料为20CrMnTiH,采用渗氮后淬火处理,现已完成转向机整体的道路试验和耐久台架试验,均符合设计标准。按实际装配情况在SolidWorks中对转向器齿轮齿条进行建模装配后导入ADAMS,并对齿轮、齿条赋予材料、质量等属性,并添加约束:对齿轮轴和地面之间创建旋转副,对齿条和地面之间创建移动副。在齿轮齿条之间施加接触,以实现齿轮齿条之间的相对运动。
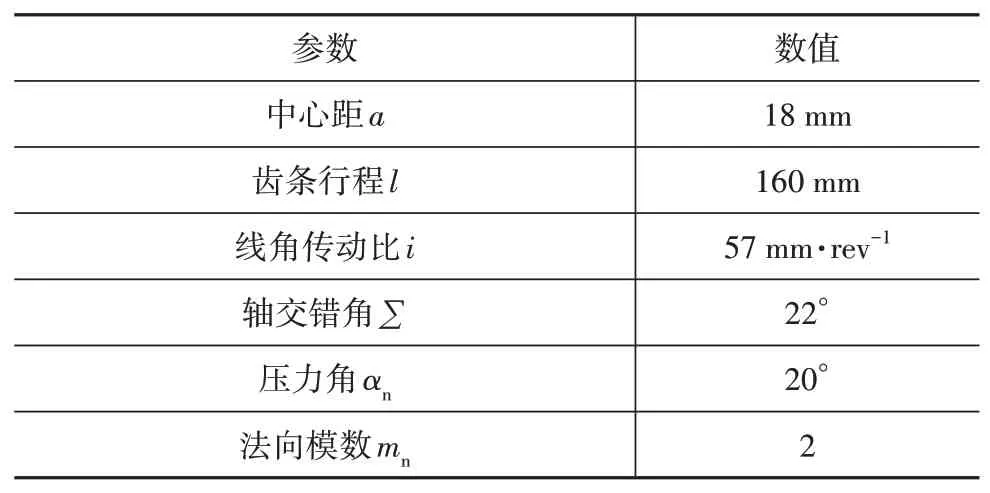
表1 齿轮齿条基本参数表
为验证转向系统运动的有效性和可靠性,定义齿轮轴的驱动力矩函数为:Function(time)=2sin(πt),如图3所示。以仿真时间为2 s、仿真步数为2 000步对转向系统的平顺性进行仿真。图4和图5为齿条的位移和速度曲线。
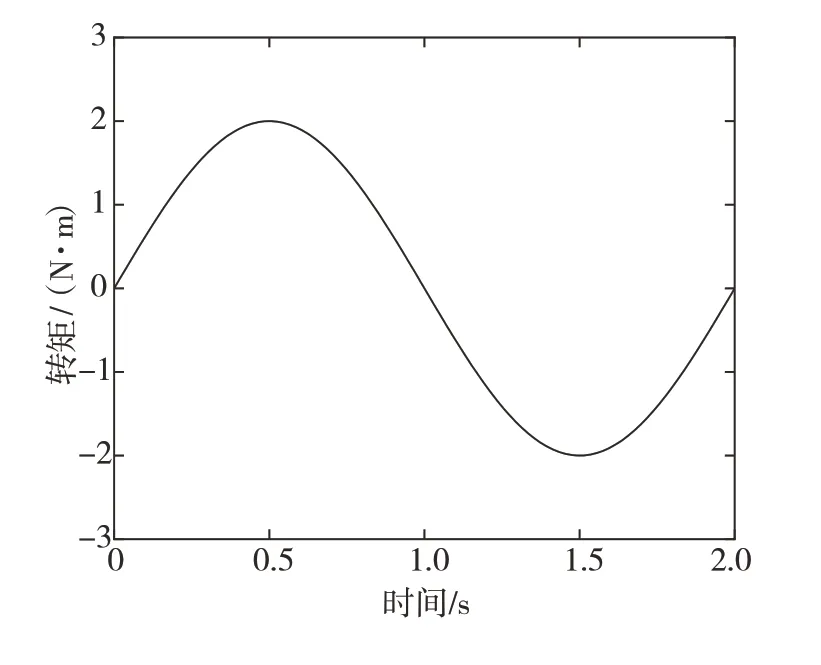
图3 齿轮轴驱动函数曲线
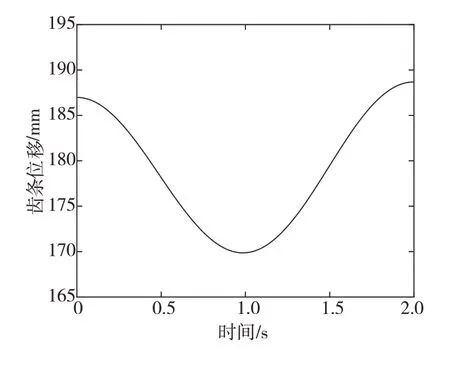
图4 齿条位移曲线
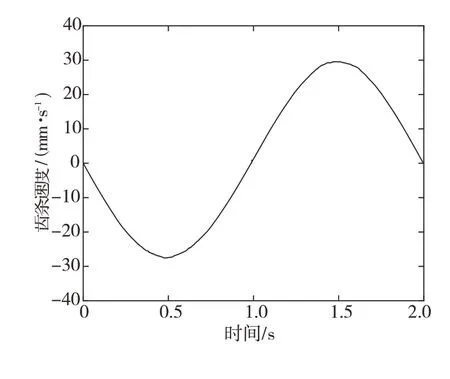
图5 齿条速度曲线
由图4和图5可知,齿条位移、速度分别呈近似余弦、正弦曲线变化趋势,与齿轮轴的驱动函数相一致。时间t=0.5、1.5 s时,转向盘力矩达到最大值,此时齿条速度也达到最大值;时间t=1 s时,转向盘反转,齿条位移达到最大;时间t=2 s时,齿条速度为0,回到起始位置。仿真表明转向系统模型平顺性良好,可以作为联合仿真系统里的机械子系统。
3 冗余转向控制系统设计
3.1 直线型助力特性曲线的确定
转向系统的助力特性决定了该转向系统在不同工况下输出助力的大小。为满足驾驶员转向需求,设计的助力曲线应满足低速下多助力、高速下少助力的原则[10]。本文对直线型助力特性曲线进行设计,需要确定以下参数。
(1)助力电机开始运行时的转向盘转矩Td0,助力电机输出力矩饱和时的转向盘力矩Tdmax
考虑到助力特性曲线要用到电动汽车上,为避免转向过度灵敏,在转向力矩较小时不提供助力,取Td0=1 N·m。助力电机最大输出转矩时,转向盘最大转矩为

取转向盘的最大操纵力Fmax=16 N,转向盘直径D=50 cm,最终确定转向盘最大转矩Tdmax=4 N·m。
(2)最大助力电流Imax
在原地转向(0车速)时转向阻力矩最大,计算出原地转向时齿条所受阻力矩,从而确定最大助力矩Tamax,最终可以得到最大助力电流Imax。


式中:Fn、Fa、Ft1、α、β1、β2、T'、d1分别是齿轮齿面正压力、齿条所受最大阻力、齿轮圆周力、齿形角、齿轮螺旋角、齿条倾角、齿轮轴所受最大阻力矩、齿轮分度圆直径。其中齿条所受最大阻力Fa=10.4 kN、齿形角α=20°、齿轮螺旋角β1=29.2°、齿条倾角β2=7.2°、电机转矩系数kt=0.867 N·m∕A、减速机构传动比gm=21。根据以上公式最大助力电流Imax=50 A。
(3)特征车速感应系数K
为保持曲线精度、提高计算速度、减少试验成本和时间并提高效率。现取0、50、100和150 km∕h为特征车速,在装配KISLER力矩转向盘和IMC数采系统的荣威marvel x样车上采集各特征车速下的最大转向阻力,通过计算可得各工况下助力电机应提供的助力矩,进一步即得出样本车速下的车速感应系数,各特征车速下车速感应系数如表2所示。

表2 特征车速下车速感应系数
(4)车速感应系数拟合
对表2中数据进行多项式拟合,可以得到全车下的车速感应系数,如图6所示。随着车速增加,车速感应系数越来越小,既保证了在低速下助力电机能够提供合适助力,便于驾驶员轻松驾驶,又满足高车速下提供较小助力,防止驾驶过程中过快转向失去“路感”[11]。
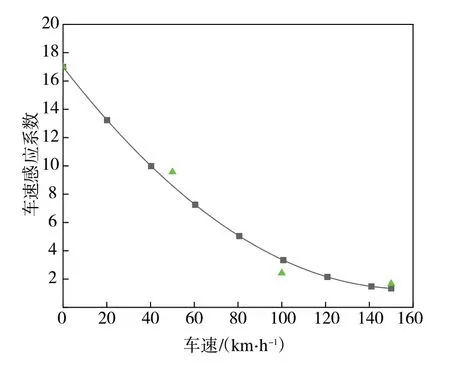
图6 车速感应系数拟合曲线
车速感应系数拟合曲线表达式为

于是可得到全车速下的助力特性曲线,如图7所示。
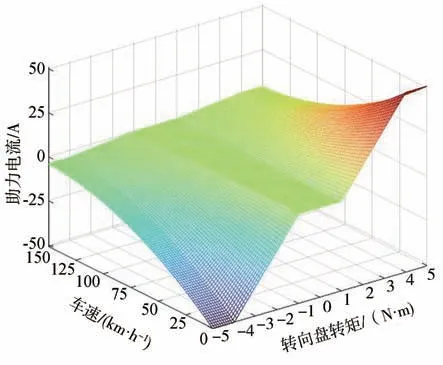
图7 直线型助力特性曲线
3.2 冗余转向控制策略设计
本文针对冗余转向系统的基本助力控制模式进行设计,两个ECU同时开始工作对转矩信号以及车速信号进行处理,并由图7中助力特性曲线计算得出该转向工况下的目标电流,将该电流分配得到主副电流,主副电流在控制器的作用后组成合电流,通过自主设计的仲裁模块进行判断,控制六相电机输出相应的助力矩,在经过蜗轮蜗杆机构的减速增力矩作用后,传递到齿轮轴上和转向盘转矩共同驱动齿条进行横向移动,从而实现车辆的转向。
而实际电流和目标电流会存在偏差,需要对电流修正使其尽可能接近目标电流,以便控制六相电机输出精确的助力矩。目前,PID控制器以其原理简单、容易实现等优点被广泛应用于转向系统中,利用PID控制器可以有效减低实际电流与目标电流之间的误差,理想条件下PID控制规律为

式 中:KP为 比 例 系 数;KI为 积 分 系 数;KD为 微 分系数。
冗余转向系统的电流分配方案如图8所示。正常工作下,每条回路承担总目标控制电流的一半,回路中有问题会反馈到仲裁模块,由仲裁模块进行故障识别、处理、仲裁和补偿机制的建立、完善和优化,通过合适的阈值和状态切换策略,保证转矩助力平衡分配、平稳过渡,极端情况一个回路失效,另外一个控制回路可以至少保持50%的助力电流。

图8 冗余转向系统电流分配方案
在Simulink创建冗余转向系统的控制模型,如图9所示。其中输入模块为车速信号、转向盘转矩信号,经过助力特性函数曲线模块处理后生成目标电流,目标电流被平均分配主副电流,在PID控制器对电流进行调整后,生成合电流控制六相电机输出助力矩。
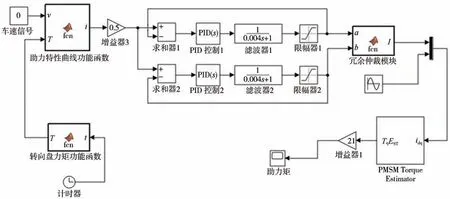
图9 冗余转向系统控制模型
4 冗余转向系统的联合仿真
4.1 联合仿真模型的建立
利用ADAMS中Control模块可以对机械子模型和控制子模型的输入接口、输出接口连接,从而实现机械模型和控制模型数据的交互[12]。在ADAMS动力学模型中,定义转向轴转速、转向助力矩为输入变量,齿轮轴力矩、齿条输出力为输出变量。利用Matlab软件的接口将动力学模型和控制模型联合起来,进行仿真分析。调整联合仿真的控制参数,其中动力学仿真采用离散型,联合仿真的时间间隔设为0.005 s,选择ode4作为迭代求解器。
4.2 联合仿真分析
4.2.1 输入输出特性仿真
依据汽车动力转向器总成台架试验方法进行输入输出特性仿真,在转向系统联合仿真模型中输入幅值为5 N·m、频率为1 rad∕s、初相为π∕2的正弦信号模拟转向盘操纵力,记录50、100 km∕h车速下转向系统单回路工作和正常工作状态下齿条输出力曲线。冗余转向系统齿条输出力曲线如图10所示。
由图10可知,转向盘转矩小于1 N·m时,助力电机不产生助力,齿条输出力全由转向盘力矩提供。转向盘转矩大于1 N·m时,助力电机开始工作,齿条输出力近似线性增加。转向盘转矩达到4 N·m时,助力矩保持恒定,曲线上升趋势变缓;转向盘转矩一定时,50 km∕h车速时齿条输出力较100 km∕h车速下的齿条输出力更大,体现了该转向系统具有较好的路感;双控制回路都正常工作时,助力电机两侧都正常工作。在一条控制回路出现故障时,关闭助力电机一侧助力,另一侧电机仍提供一半的正常助力保障驾驶时正常转向,由此说明该冗余转向系统具有较好的容错性。
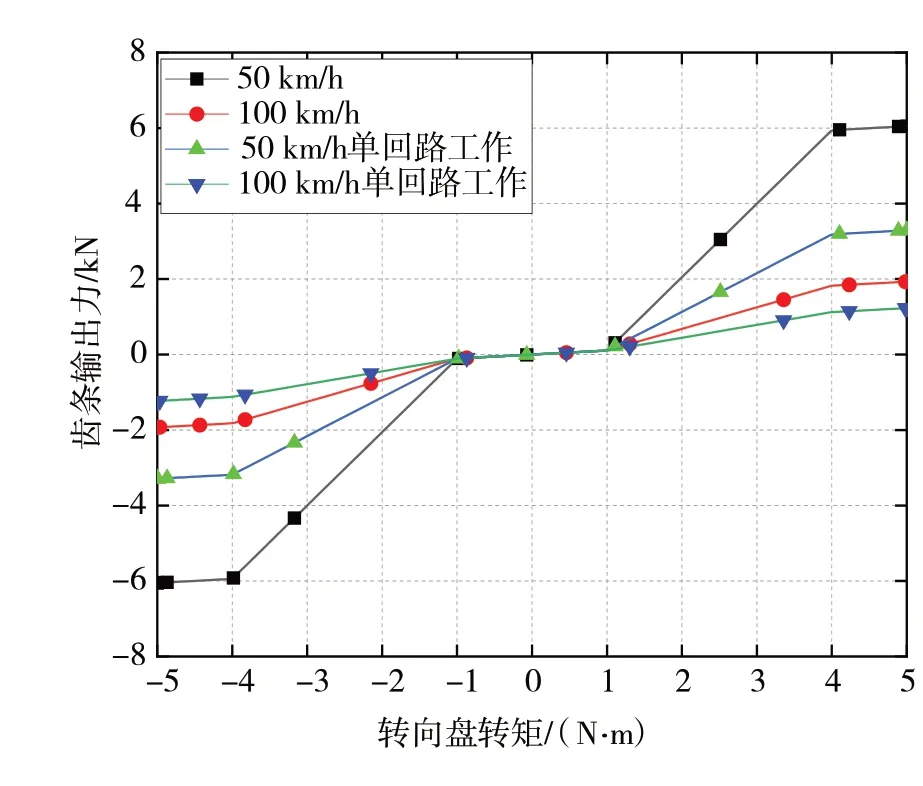
图10 输入输出特性曲线
4.2.2 助力功能特性仿真
为验证冗余转向系统满足助力需求,现对原地转向情况进行仿真。定义齿轮轴转速函数Function(time)=IF(time-24:IF(time-8:60d,60d,-60d),
-60d,60d),定义齿条负载为10 kN,转向盘转矩和转角之间的关系如图11所示。
由图11可知,转向盘从中间位置转至-480°再到480°最后回正的过程中,转向盘左转时平均转矩为2.462 5 N·m,右转时平均转矩为2.412 8 N·m,可见左右转向时电机助力基本一致,避免了转向时轻重不一的情况;转向盘转矩最大值为2.728 N·m,且转矩上下波动小于0.5 N·m,转向系统助力平稳,不存在转向卡滞现象,符合转向器设计标准。
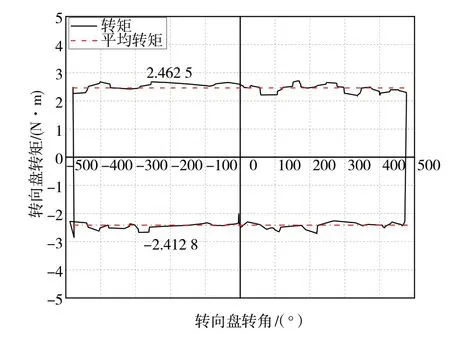
图11 原地转向力矩曲线
5 试验验证
为验证联合仿真的分析精度,开展转向系统台架试验进行对标。转向器试验台如图12所示,试验台输入端采取伺服系统加载的方式,利用伺服电机输出转矩来模拟驾驶员手力操纵转向盘[13]。齿条输出端采取伺服电机来模拟施加地面阻力,通过调节伺服电机电流施加不同阻力。利用计算机对各传感器中数据进行分析处理[14]。
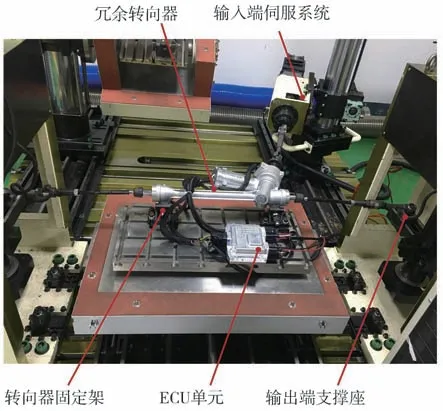
图12 转向系统试验台
为了与联合仿真对比,利用伺服电机对齿条施加10 kN的阻力,输入端伺服系统对齿轮轴施加10 r∕min的转速使其由中间位置转动至左极限,然后再转动至右极限,最后回到中位作为一个试验循环。转向盘转矩曲线如图13所示。
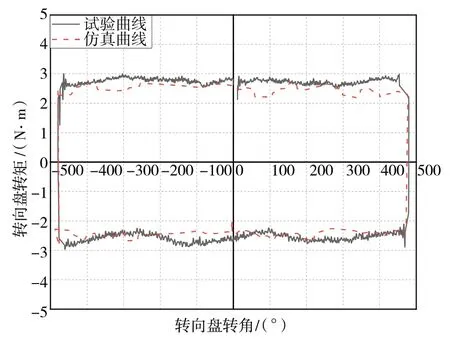
图13 原地转向力矩试验曲线
由图13可知,驾驶员在操纵装配冗余转向系统的车辆转向时,转矩波动仅有0.5 N·m,手感更加舒适。基于原地转向台架试验左右转向两种情况重复试验,得到仿真和试验对标情况如表3所示。
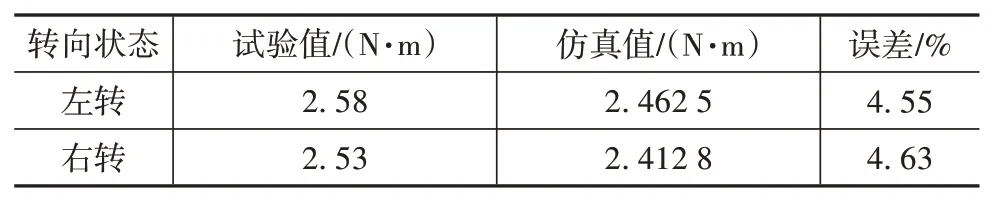
表3 转向系统原地转向力矩仿真试验对标
由表3可知,不论左右转向,联合仿真所得结果和试验测试结果误差均小于5%,联合仿真分析可靠,对转向系统前期研发设计具有指导意义。通过对转向系统台架试验的实际情况和联合仿真简化模型进行分析,存在的误差有以下几种原因:(1)联合仿真模型中利用转矩预测模块来模拟六相电机的输出转矩,实际上六相电机工作时也会存在转矩波动,从而造成转向盘转矩波动的现象;(2)仿真时没有考虑到蜗轮蜗杆传动时的转矩波动,而蜗轮蜗杆传动的平稳性会影响到转向轴的转矩变化;(3)动力学模型只考虑了齿轮齿条之间的摩擦,而试验时转向系统内部零件较多,装配时也会存在装配误差,实际阻力较大,所以试验数据偏大于仿真结果。
6 结论
(1)本文针对冗余转向系统开发周期长、试验成本高的问题,建立了ADAMS-Simulink的联合仿真模型。在ADAMS中建立齿轮齿条的动力学模型,并基于Simulink创建冗余控制系统模型,最后利用MATLAB软件的交互功能联合两个模型,进行冗余转向系统的助力性能仿真。
(2)冗余转向系统在助力过程中转矩平稳,具有良好的助力特性,且在单回路工作时,助力电机能够输出50%助力矩协助驾驶员靠边停车,转向可靠性大大增加,行车更加安全;联合仿真所得结果和试验测试结果误差不超过5%,该联合仿真的方法是正确的、有效的,可以实现对转向系统的性能仿真。
(3)建立的动力学模型仅考虑了转向传动机构,实际上转向系统中其它零件对转向系统的性能也有影响。因此,后续应进一步完善模型,从而获得更精确的仿真结果。
猜你喜欢
防爆电机(2022年2期)2022-04-26
大型铸锻件(2022年1期)2022-02-12
昆明医科大学学报(2021年12期)2021-12-30
防爆电机(2021年5期)2021-11-04
铁路通信信号工程技术(2021年7期)2021-07-27
物流技术与应用(2019年6期)2019-07-16
电机与控制学报(2018年9期)2018-05-14
汽车维护与修理(2018年1期)2018-04-04
作文周刊·小学一年级版(2017年27期)2017-08-10
汽车维护与修理(2015年5期)2015-02-28
