
智能腰椎外骨骼的设计与探究
2022-12-04 12:06汪志航喻洪流
生物医学工程与临床 2022年3期
汪志航,喻洪流,石 萍
下腰痛是一种常见的疾病,在人的一生中,有85 %的人都经历过腰疼[1]。据中国卫生部门统计,中国腰痛患者已突破2亿,约占全国总人数的15.2%[2]。腰痛影响着个人生存质量,严重情况下会导致残疾,而且因为医疗费用和劳动力损失,腰痛对医疗事业和社会经济造成了很大的损害[3,4]。约37%下腰痛是由职业因素如重体力工作、长时间劳作等所造成的[5]。其中反复举起和搬运重物是下腰痛的主要危险因素。与下腰痛的治疗不同,辅助装置通过为人体增加机械动力、减少腰背部肌肉活动度从而降低下腰痛的风险[6]。所以小型便携的穿戴式外骨骼被人们所关注。各种主、被动腰椎外骨骼被开发出来,例如PLAD[7](personal lift augmentation device)、SPEXOR[8]、H-WEX v2[9]和Robo-Mate[10]。PLAD是被动外骨骼,不需要外部电源来工作,它主要是在穿戴者弯腰提物动作时给予力的辅助,从而降低穿戴者腰痛的风险;SPEXO同样是被动腰椎外骨骼,也是对弯腰提物进行助力,它使用了线圈弹簧和柔性梁来提供动力,大大减小了设备的质量;H-WEX v2和Robo-Mate则是主动外骨骼,HWEX v2使用了线驱动机构实现系统性能,可进行精细的力控制;Robo-Mate使用的是弹性驱动器,它为佩戴者提供了更大的活动范围,使其不妨碍日常生活。但这些外骨骼都只是简单地起到助力辅助的作用,不能为使用者提供相应的康复训练。而且它们都采用串联机构设计,不能满足腰部单关节多自由度耦合运动的需求。从生物力学的角度来看,并联机构正好可以满足腰部运动的耦合性。因此,有必要设计一款基于并联机构的便携、舒适、具有康复训练的助力牵引腰椎外骨骼。
笔者开发了一款智能腰椎外骨骼,采用4-SPS/SP(spherical joint:球形关节;prismatic joint:移动关节)并联机构设计,实现对腰椎的助力牵引、屈伸、侧屈和旋转,可单独或组合完成,以期达到缓解腰部疲劳、降低疼痛发生概率的目的。同时,设计了上位机系统,实现了使用者康复训练信息的上传和储存,方便医生查看和分析。
1 材料与方法
1.1 智能腰椎外骨骼结构设计
智能腰椎外骨骼的结构设计主要包括主体设计、绑带设计和动力模块设计。设计的腰椎外骨骼根据Stewart平台改进,采用4-SPS/SP机构,由围绕躯干的2个环组成上下平台,共有4个主动自由度。这2个环使用丙烯腈-丁二烯-苯乙烯共聚物(acrylonitrile butadiene styrene,ABS)材料进行三维(three dimensional,3D)打印并通过用于调节尺寸的调节带、子母扣连接而成,可以根据人的体质量调节环的大小。上下平台之间使用4个带有SPS配置的支链,即支链与上下平台连接处是球轴承(S),支链本身是移动关节(P)。约束链SP代表了人体脊柱的运动。上下平台之间的每个支链上都装有线性执行器Actuonix-L16型的电动推杆,连接到小型的直流电机驱动器,以控制执行器的长度或力。每个执行器内都有一个集成的线性电位器,并与压力传感器串联。见图1。

图1 智能腰椎外骨骼整体结构Fig.1 Overall structure diagram of intelligent lumbar exoskeleton
1.2 智能腰椎外骨骼控制系统设计
智能腰椎外骨骼的控制系统(图2)是整个设备运行的核心,实现各种模式下的康复训练数据的传输。用户通过智能终端设置训练参数,包括康复训练模式、角度、拉力和训练时间,无线保真(wireless fidelity,WiFi)通信模块ESP8266对参数进行解码并传输至微控制器。微控制器通过标准485(recommended standard-485,RS-485)通信协议将驱动指令传给电机驱动器,驱动器控制4根电动推杆的运动,实现助力牵引和不同模式的康复训练。同时,用户每次使用外骨骼,系统都会通过模数转换(analog-to-digital convert,ADC)模块采集训练数据(角度、压力、训练时间),通过信号处理器处理后会记录下来再传送到上位机,用于医生进行分析后制定更加合理的康复方案。
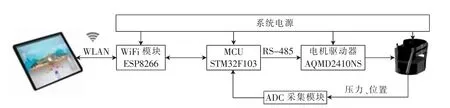
图2 智能腰椎牵引外骨骼控制系统架构Fig.2 Block diagram of intelligent lumbar traction exoskeleton control system
1.3 智能腰椎外骨骼系统模块设计
1.3.1 主控制及系统供电
由于智能腰椎外骨骼便携的特点,所以要求控制系统要相对集成化。这就对主控制系统芯片的性能和功耗有了一定的要求。主芯片不仅需要能够为系统提供定时器、外部中断和直接存储器存取(direct memory access,DMA)等功能,在数据传输上还得支持RS-485和串口等通信协议。智能腰椎外骨骼在实现基本功能的同时,还需要通过高分辨率的ADC转换器采集信号。所以该系统采用了ST公司的ARM系列Cortex-M3内核32位单片机STM32F103ZET6作为整个系统的主芯片。
电源是整个系统能够运行的基础,电路的安全性是电源系统设计中首先需要考虑的。智能腰椎外骨骼控制系统中各个硬件设备的工作电压都不相同,所以电源电压需要经过多次变换。220 V交流电压经过适配器输出12 V直流电压到电机驱动器和直流电机,12 V电压通过LM2576芯片做直流转直流(direct current to direct current,DC-DC)变换为5 V电压为压力传感器供电。主芯片及其外围电路的工作电压为3.3 V,所以5 V电压再通过DC-DC变换为3.3 V电压为主芯片供电,从而实现整个系统的电源供应。电源模块的电路原理图如图3所示。
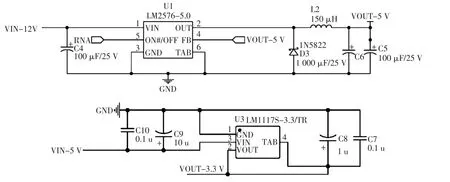
图3 电源模块电路原理图Fig.3 Circuit schematic diagrams of power module
1.3.2 驱动模块和执行元件
智能腰椎外骨骼系统的驱动模块采用的是AQMD2410NS直流电机驱动器。该驱动器使用了电机回路电流检测技术,自带电流环反馈,同时支持RS-485多站通信和现场总线远程中断控制(modbus remote terminal unit,Modbus-RTU)通信协议,方便通过主芯片进行通信控制。在调速方面也支持脉冲宽度调制(pulse width modulation,PWM)调速、力矩控制等多种调速方式。控制系统的驱动元件采用的是Actuonix-L16电动推杆,它包含了线性运动装置与位置反馈及复杂的位置控制能力。电动推杆的设计是沿着整个行程长度上推动或拉动负载,它的速度是由所施加的载荷决定的,可以通过降低驱动电压来降低。当电源被移除时,电动推杆将保持其位置。
1.3.3 人机交互
人机交互模块可以完成人与设备的信息传递与交流,通过上位机可以实现系统间的双向通信功能。该系统配备了WiFi模块ESP8266,上位机可以通过ESP8266连接主控制器,然后通过传输控制协议(transmission control protocol,TCP)向主控制器发送指令,调试、操作设备。同时,设备也能通过模块向上位机发送训练数据,实现双向通信。
1.4 软件设计
硬件系统搭建完成后,需要合适的软件设计保证系统能够安全运行并实现设想的各种功能。软件系统的设计包括主芯片与各模块之间的通信协议和数据传输、传感器信号的采集及上位机的设计和控制。整个系统的软件设计流程如图4所示。
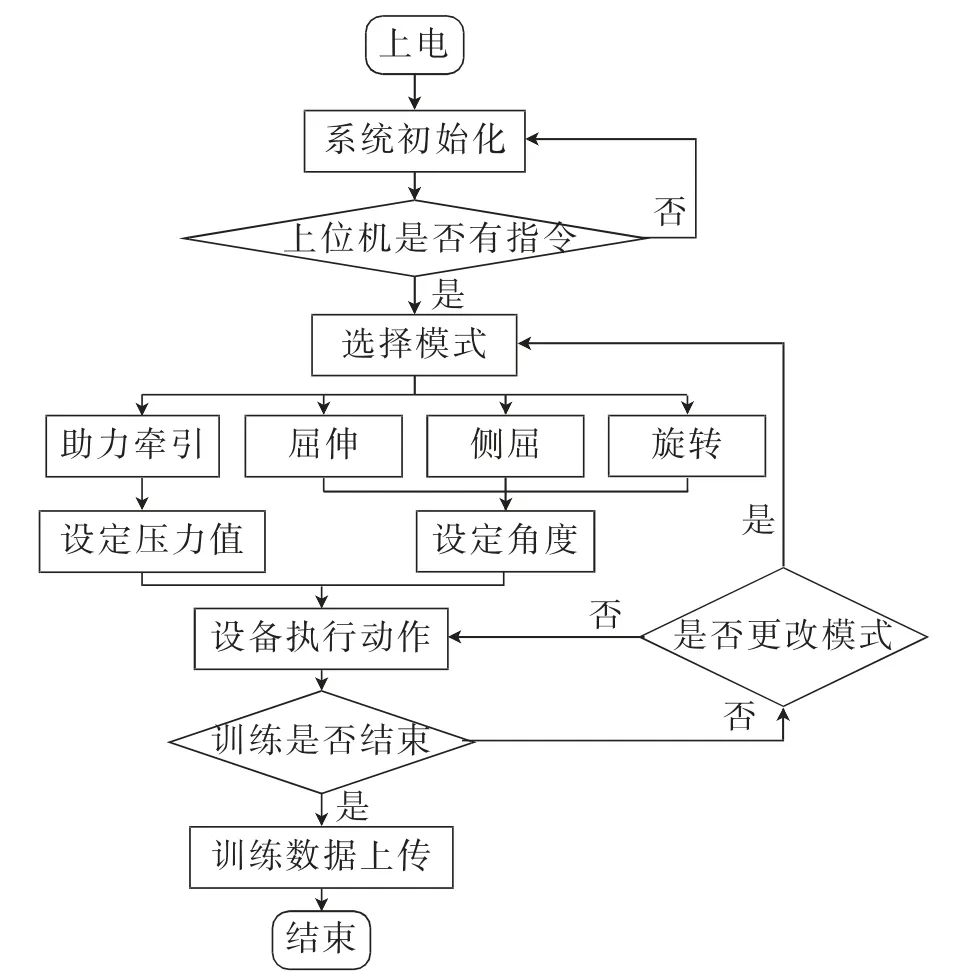
图4 控制系统软件设计流程图Fig.4 Software design flow chart of control system
当按下电源键时,智能腰椎外骨骼开始工作,所有模块进行初始化,随后检测各个模块是否正常运行。一切就绪后,系统等待上位机的指令并在之后进入患者选择模式。患者在选择助力牵引、屈伸、侧屈、旋转4种模式时可以设定不同的参数(助力牵引方向为纵向,只需设定压力值,其余模式设定角度值)。设定完这些参数后,主控制器通过RS-485通信协议与电机驱动器进行通信,设置电机运行模式为PWM调速模式或力矩模式,同时与电位计和压力传感器完成闭环控制,然后设备开始执行不同模式对应的动作。牵引开始后,患者可以自主选择训练是否结束。当进入更改模式后,主控制器接收信号,先将电动推杆复位,然后再根据患者选择的模式执行动作。康复训练结束后,传感器采集到的信号和训练时间会通过WiFi模块上传给上位机,方便日后医生的康复评估。
1.5 性能测试
为了确定智能腰椎外骨骼在不同模式下康复训练的角度能否达到设计的要求(该设计要求由医师设定)及测量助力牵引下的拉力大小,进行了角度和拉力的测试。将智能腰椎外骨骼放置在测试平台上,通过姿态传感器和电动推杆中的电位计采集不同模式下的执行角度;通过压力传感器采集助力牵引下拉力的大小。同时,对该外骨骼的安全性也进行了测试。
1.6 助力牵引功能验证试验
研究表明,当疼痛发生时,身体会通过收缩肌肉来保护自己[11]。所以通过测量腰部的肌电信号来评价腰椎的功能和治疗效果。为了证明智能腰椎外骨骼的功能,选择10例无脊柱疾病史的健康男性受试者,平均年龄26.1岁(标准差3.7岁),平均身高172.3 cm(标准差5.57 cm),平均体质量62.5 kg(标准差5.72 kg)。使用了高精度肌电信号采集系统Noraxon为每例受试者采集肌电信号,采样频率1 500 Hz。
根据以往的研究[12,13],肌电电极贴在受试者的胸椎竖脊肌(thoracic erector spinae,TES)T9棘突外5 cm和腰椎竖脊肌(lumbar erector spinae,LES)L3棘突外3 cm(图5A)。放置电极的地方用75 %乙醇溶液擦拭,以改善皮肤和电极之间的接触,提高肌电图数据的准确度。
试验分为2组:一组(无助力组)是在穿戴智能腰椎外骨骼但无助力牵引的情况下进行,一组(助力组)是在穿戴智能腰椎外骨骼助力牵引的情况下进行,受试者穿戴智能腰椎外骨骼如图5B所示。试验开始后,受试者先全身呈放松状态,双脚与肩同宽,保持5 s;然后5 s内双手将桌子上的10 kg箱子从腰部举到胸部,保持举重状态5 s;最后在5 s内把箱子放下,身体站立5 s。每个受试者循环5次,相邻举重任务之间有10 min的休息时间,以确保受试者TES和LES肌肉得到了充分的休息。

图5 肌电电极放置位置(A)与受试者穿戴智能腰椎外骨骼(B)图Fig.5 Images of EMG electrode position(A)and subject wearing intelligent lumbar exoskeleton(B)
试验获得的肌电信号应用10~500 Hz的带通滤波器去除非表面肌电伪影,再应用50 Hz陷波器来消除工频干扰,然后对信号进行整流,并在10 ms的滑动窗口内进行均方根包络。每个通道的肌电信号计算RMS并进行归一化处理。

其中:Xi是信号的第i个样本;N是期间的样本数;RMS_peak是肌电信号的最高均方根值。
1.7 统计学方法
采用SPSS统计软件进行分析。所有的定量均以平均值和标准差表示,采用配对样本t检验对实验数据进行分析。显著性水平为P<0.05的检验结果均认为有统计学意义。
2 结果
2.1 智能腰椎外骨骼性能测试
智能腰椎外骨骼执行屈曲伸展、侧向弯曲及轴向旋转3种训练模式达到的角度如表1所示。从表中可以看出各种模式下的角度与设定角度只存在<1°的误差。表明智能腰椎外骨骼在不同模式下康复训练的角度能够实现设计目标。

表1 3种训练模式下训练角度和设定角度Tab.1 Training angle and setting angle in 3 training modes
智能腰椎外骨骼在助力牵引模式下拉力的大小为0~400 N,在这个范围下人体不会产生任何的不适感。系统电路板和电池单独放置在控制盒中,不与使用者直接接触,同时在盒上设有急停按钮,安全可靠。经试验测得,在智能腰椎外骨骼执行过程中,当电动推杆达到设定量程时,电动推杆会停止工作,保持设定位置。
2.2 助力牵引功能验证试验结果
受试者进行举重任务时左右LES和TES的RMS_norm如图6。结果显示,在助力牵引情况下,不管是左LES还是右LES的肌电信号RMS均明显要低于未牵引的情况(t=2.67,P<0.05);对于TES,左TES在助力牵引情况下肌电信号RMS也是明显低于未助力牵引的情况(t=3.77,P<0.01),虽然右TES的肌电信号RMS没有呈显著性变化,但也可以看出是趋于降低的。由此可知,受试者在助力条件下,腰部的肌肉活动度大幅下降,肌肉疲劳降低。这也验证了智能腰椎外骨骼能够有效降低腰部疼痛发生的概率。
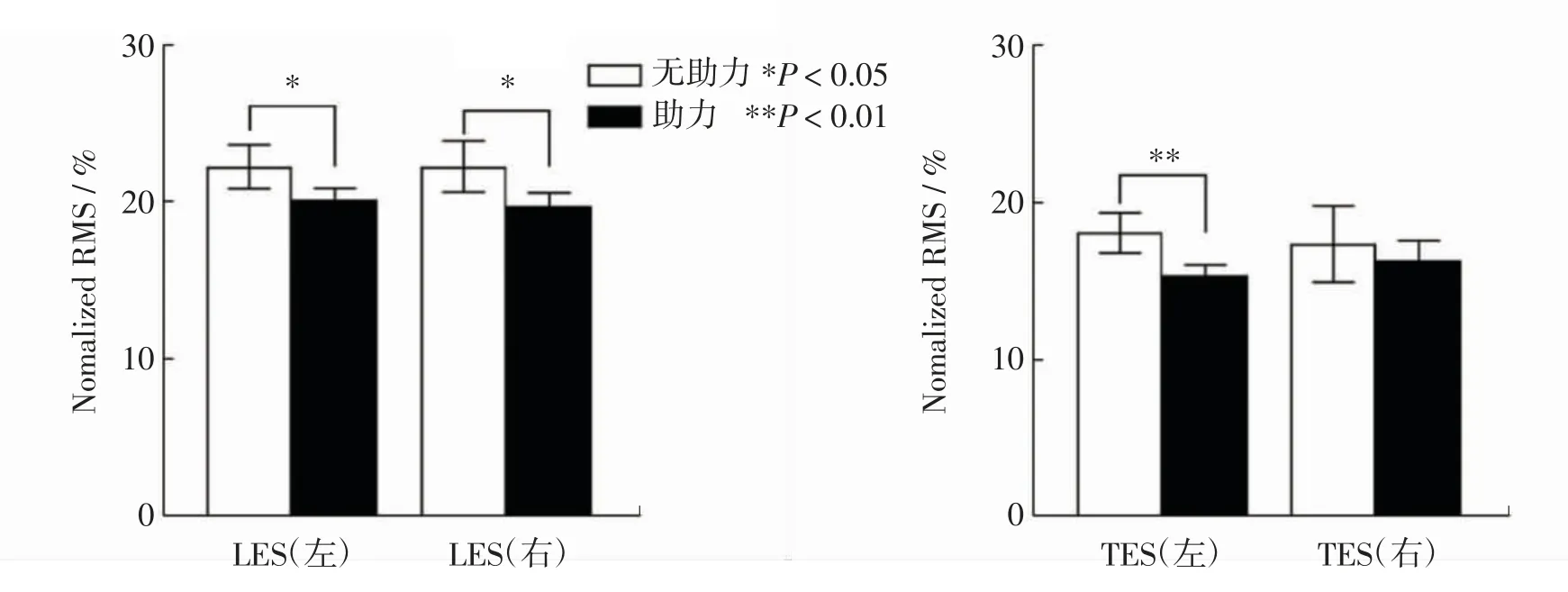
图6 举重任务中有无助力牵引情况下左右LES和TES肌电信号的RMSFig.6 RMS of LES and TES(left and right)of EMG with or without assisted traction in weight lifting task
3 讨论
笔者提出的智能腰椎外骨骼体积小、质量轻,易于穿戴,可用于下腰痛患者随时随地进行康复训练。该外骨骼安全可靠,结构上设置了机械限位,电气上设有急停开关,可以在第一时间保障使用者的安全。与现有的腰椎外骨骼相比,该外骨骼采用4-SPS/SP并联机构设计,符合腰部单关节多自由度耦合运动的需求。用户在使用的过程可以选择不同的训练模式;同时上位机可以人性化设置训练参数,能够更有针对性地对腰部进行康复训练。该外骨骼不仅实现助力牵引的功能,还可以进行屈伸、侧屈、旋转训练,各种训练的角度与设定角度只存在<1°的误差,能够按照医师设定的角度进行康复训练,不会产生不适感。在举重任务中,受试者在智能腰椎外骨骼的助力条件下,腰部的肌肉活动度大幅下降,这说明智能腰椎外骨骼可以通过辅助人体的肌肉关节的活动度来减少诱发因素对人体肌肉骨骼系统的影响,从而降低腰痛的发生的概率。笔者的试验都是针对健康人进行的,后期应考虑加入腰痛患者的试验数据。此外,智能腰椎外骨骼如能加入主动训练模式,可以增加使用者的训练多样化。
4 结论
笔者总结了现有腰椎外骨骼的优缺点,设计了一种穿戴式智能腰椎外骨骼,采用了高精度、体积小的4-SPS/SP并联机械结构。控制系统采用模块化设计并增加了人机交互功能,实现设备与上位机的双向通信。智能腰椎外骨骼能够安全实现不同模式下的康复训练,并且人体试验的结果证明,受试者在穿戴智能腰椎外骨骼且助力牵引的情况下,LES的肌电信号RMS显著降低,TES的肌电信号RMS也呈下降趋势,从而证明了智能腰椎外骨骼在降低腰部疼痛发生概率的有效性。
猜你喜欢
现代仪器与医疗(2022年4期)2022-10-08
中国典型病例大全(2022年11期)2022-05-13
现代仪器与医疗(2022年1期)2022-04-19
中国听力语言康复科学杂志(2021年6期)2021-12-21
成都信息工程大学学报(2021年4期)2021-11-22
现代仪器与医疗(2021年1期)2021-06-09
小哥白尼(野生动物)(2021年12期)2021-03-29
轻兵器(2019年5期)2019-06-21
科技传播(2019年24期)2019-06-15
北京航空航天大学学报(2017年9期)2017-12-18
