
源重构近远场变换的探头补偿算法
2022-12-01 08:14袁浩波董欣欣张瑞雪鲁榄埔
上海交通大学学报 2022年11期
袁浩波, 董欣欣, 张瑞雪, 鲁榄埔, 陈 曦
(西安电子科技大学 电子工程学院,西安 710071)
平面近场测量是天线测量与诊断的最重要技术之一,主要分成两种.主流的技术采用平面波谱展开待测天线和探头天线的近场,然后采用快速傅里叶变换算出待测天线的波谱[1].该方法一般用于测量窄波束天线.由于测量平面不可能无限大,需要进行截断,所以平面近场测量的方向图中存在一个可信角[2],在可信角范围内的结果比较可靠,在此范围之外则不太可靠.即使采用某些特殊的技巧对截断误差进行弥补[3-4],也不能使得可信角范围外的方向图足够准确.此外,平面近场测量难以得到天线的后向方向图.
另一种平面近场测量方法称为源重构方法(SRM)[5-6].首先假定测量得到的接收信号即为待测天线的近区电场;然后采用等效磁流建立积分方程,并转化为矩阵方程进行求解;最后对磁流积分得到远场方向图.该方法在快速多极子、图形处理器(GPU)和机器学习等[7-9]最新技术的支持下,已经广泛应用于天线诊断、电磁成像和无相位测量等[10-16]各个方面.
SRM经常用于平面扫描的近远场变换,它最大的优点是对扫描面没有任何限制.比如该方法用于电磁场全息成像时[12],会将扫描面扩展为一个包围待测天线的长方体盒子,从而避免扫描面截断的问题.因此,SRM不需要考虑可信角,可以测量宽波束天线,还可以得到天线的后向方向图.
然而,SRM存在两个主要缺点.一是采用矩量法求解积分方程时速度较慢,这个问题目前可以通过快速多极子方法[8]或GPU计算[9]进行加速.另一个问题是,SRM还没有合适的探头补偿算法,这制约了算法的使用范围和发展前景.
最合理的SRM应该采用长方体包围面,并配合完善的探头补偿算法.作为初步的尝试,本文设计了一种基于互易定理的探头补偿算法,它适用于任意扫描面的情况.由于现有硬件设备不能进行长方体包围面扫描,所以只讨论平面扫描的情况.研究旨在摸索提高SRM精度的可能途径,从而进一步改善天线测量、天线诊断以及电磁成像等实际应用的性能.
1 互易定理
图1为平面测量系统的结构图.将待测天线记为A,探头天线记为B,探头在扫描平面S上进行测量.图中:r=(x,y,z)为场点坐标;r′=(x′,y′,z′)为源点坐标;R=|r′-r|为源点与场点之间的距离.根据洛伦兹互易定理[17]可知探头天线接收的信号功率为
(1)

根据等效原理,假定在天线A的口面附近建立一个无穷大平面S′,然后将S′的左侧包围区域全部替换成理想磁导体,而右侧不变.那么S′上的等效磁流M(r′)可以在S′右侧区域产生与原问题中EA和HA完全相同的场.这两种场可以根据电场积分算子K和磁场积分算子L写成等效磁流的表达式:
EA(r)=-K(M)=
企业的发展需要有效的平台、工具进行支撑,科学的线上审批平台让企业的发展至少在管理和审批的业务上得到了充分发挥和应用。
(2)
G2(R)(r′-r)×(r′-r)×M(r′)]ds′
(3)
(4)
(5)
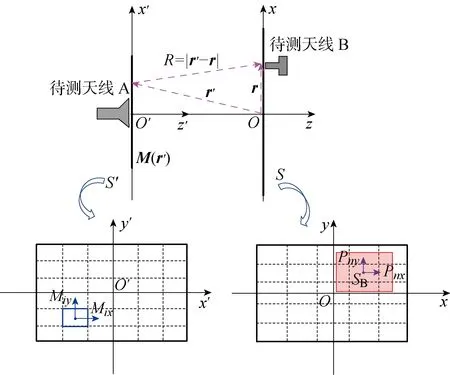
图1 天线测量系统模型Fig.1 Antenna measurement system model
P(r)=
(6)
式中:sB为区域SB面积.上式右侧是个双重面积分,计算量较大.
2 矩量法求解积分方程
采用类似于文献[5]中的矩量法求解式 (6).首先仅考虑有限大区域上的磁流分布和有限大的测量面,即对理论上无限大的磁流面S′和测量面S进行截断.


最后,式(6)右侧的积分区域SB的几何中心位置rn由第n个采样点确定.SB往往覆盖S面上若干个矩形面片,其具体尺寸由探头口面场的分布确定.比如对于波导探头来说,其电磁场在口面之外快速衰减到几乎没有,因此SB一般取口面向外扩展1个波长即可.继续扩大该尺寸,则算法消耗的时间快速增加,但对于整个算法精度的提高没有明显的作用.
采用上述离散过程可将式(6)展开为
(7)
(8)
写成矩阵方程:
(9)
其中矩阵元素为
α=
(10)
β=
(11)
μ=
(12)
υ=
(13)
求解式(9)得到磁流分布的展开系数,再通过式(2)即可算出待测天线的方向图.式(9)的系统矩阵是强奇异性的矩阵,求解时很不稳定.首先对系统矩阵进行奇异值分解[10],然后丢弃较小的奇异值以及对应的奇异矢量,最后解出磁流展开的系数.这种解法相当于通过滤波压制了数值误差以及测量数据中的噪声,因此得到的方向图比较光滑.
3 计算结果
图2所示的喇叭天线工作频率为8.15 GHz,对应自由空间的波长λ= 36.81 mm.喇叭的口面尺寸为122.5 mm×84.5 mm.探头天线为BJ70矩形开口波导,其口面大小为34.85 mm×15.80 mm.测量平面S大小为550.94 mm×512.94 mm,网格数设为 38×40,平面S距离喇叭天线口面150 mm,探头天线距离测量平面1 mm.此测量系统的可信角范围为[-55°,55°].等效磁流面S′大小为6λ×6λ,网格数为30×30,距离待测天线口面0.1λ.平面S和S′中心均与喇叭天线口面中心对齐.探头天线口面附近进行互易定理积分的区域为SB.本文算法中系统矩阵的规模为 3 040×1 800,将探头补偿的平面波谱算法[1]得到的方向图作为对比的参考结果.
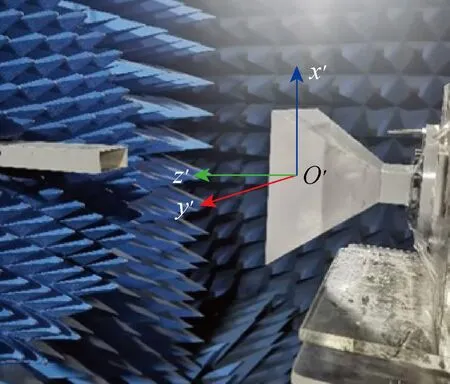
图2 喇叭天线测量系统Fig.2 Measurement configuration of a horn antenna
首先取互易定理的积分面积sB=9λ2,测试不同奇异值截断时的方向图.如图3和图4所示,本文方法求解式(9)时奇异值σ的截断主要影响方向图左右两侧,即可信角的附近范围.图中:θ为待求场点的矢径与z′轴的夹角;Eunit为归一化电场强度的幅度,Eunit=20lg(|E|/|E|max),其中E为电场强度,|E|max为最大电场幅度.保留的奇异值越多,则方向图左右两侧的抖动越明显,反之,则方向图越光滑.这主要是因为采用脉冲基函数来表示等效磁流导致积分后填充的矩阵十分病态,对误差十分敏感,在保证矩阵特性的前提下保留较少的奇异值能够有效抑制噪声.从总体上看,奇异值的截断对方向图影响不大.图中丢弃σmax×10-2以下奇异值时,仅保留了349个奇异值,此时E面和H面方向图的均方根误差(RMSE)只有0.53 dB和 0.56 dB.
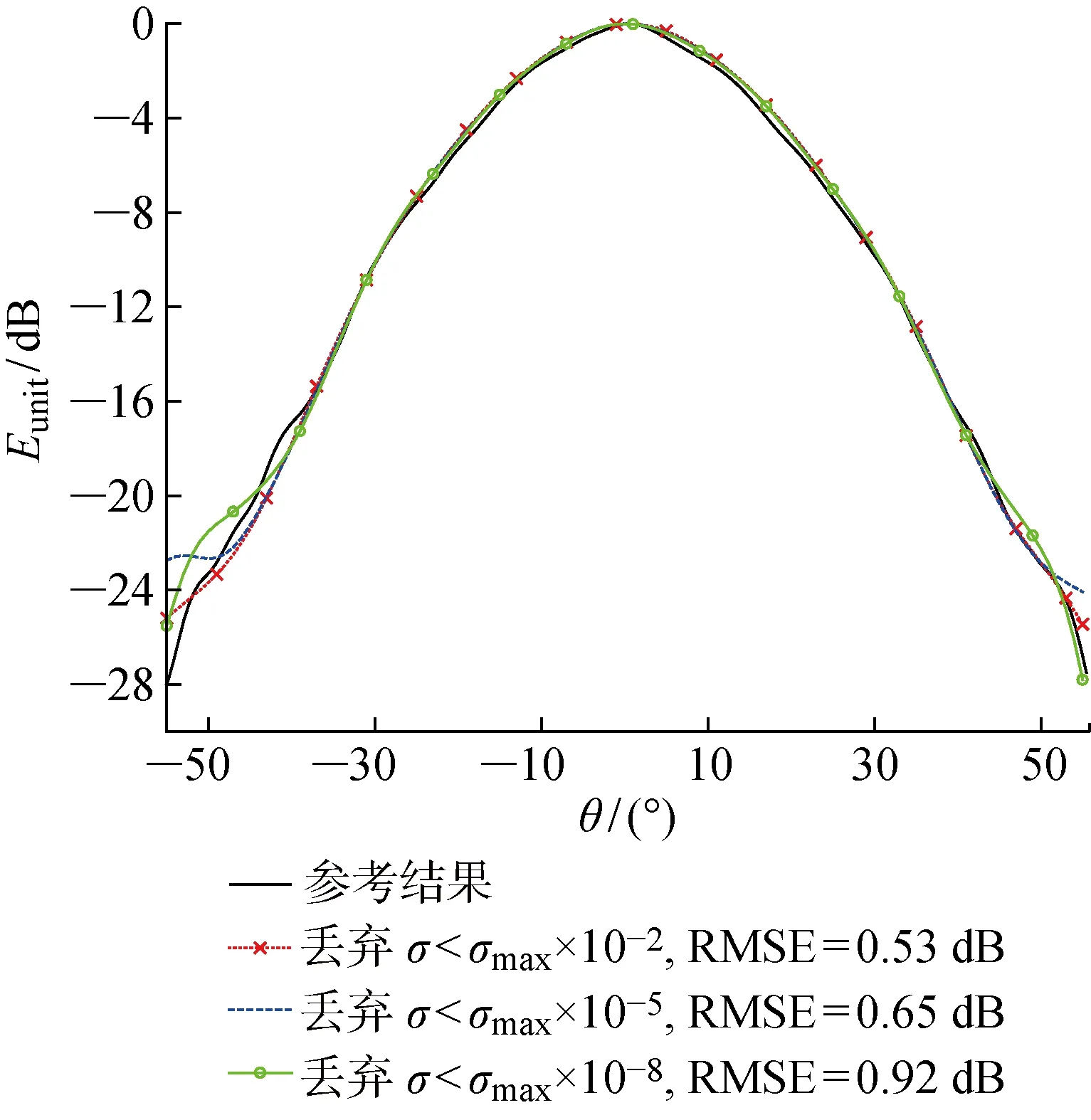
图3 不同奇异值截断时的E面方向图Fig.3 E-plane pattern for different truncation of the singular value of the system matrix
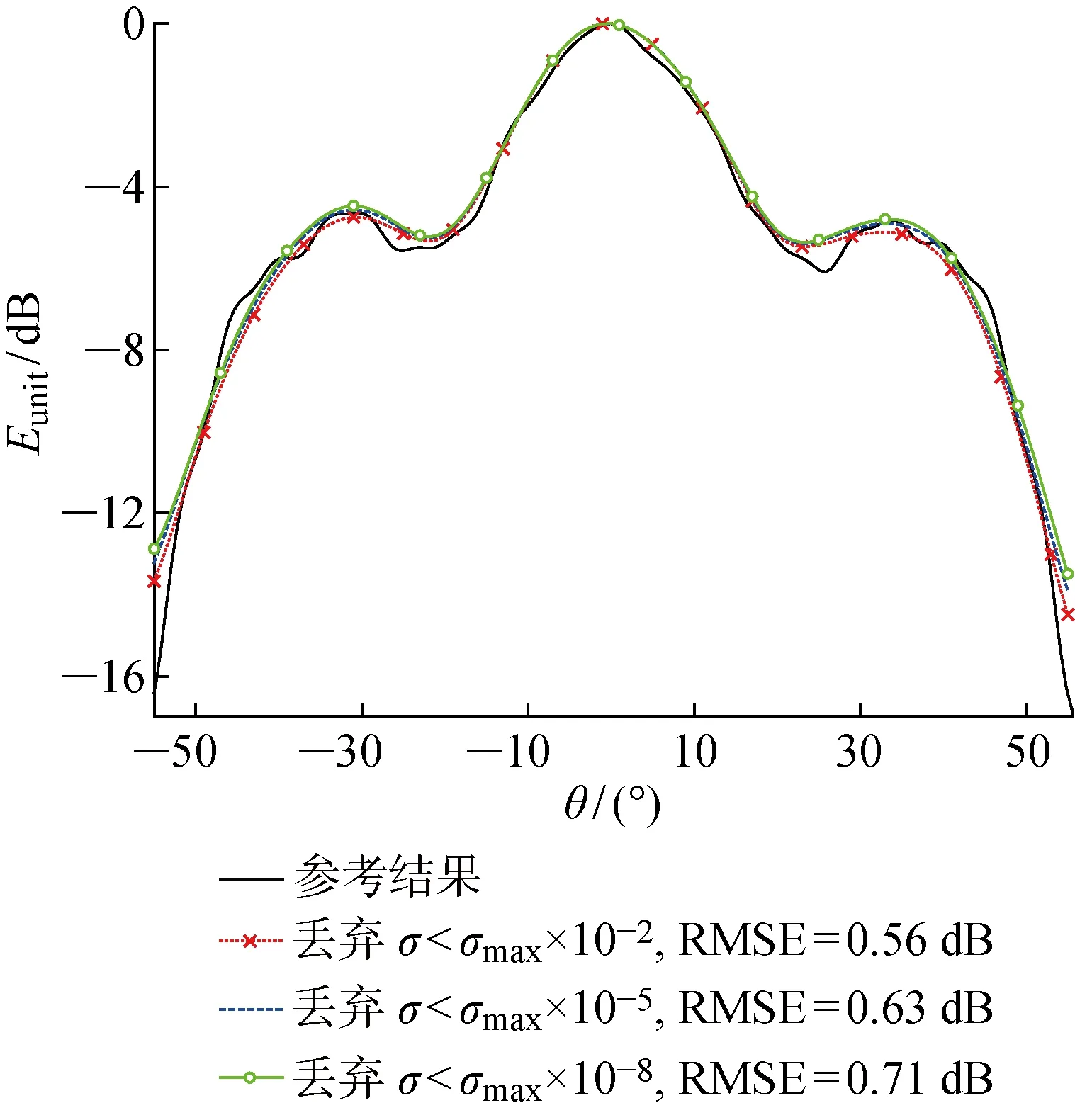
图4 不同奇异值截断时的H面方向图Fig.4 H-plane pattern for different truncation of the singular value of the system matrix
其次,求解矩阵方程时丢弃σmax×10-2以下奇异值,测试不同积分面积sB时的方向图.从图5和图6可见,积分面积sB越大,则计算结果越接近参考结果.但积分面积增加至一定程度时,计算结果将趋于稳定.为了降低计算量,并保持较好的计算精度,sB一般取略大于波导探头口面的尺寸即可.
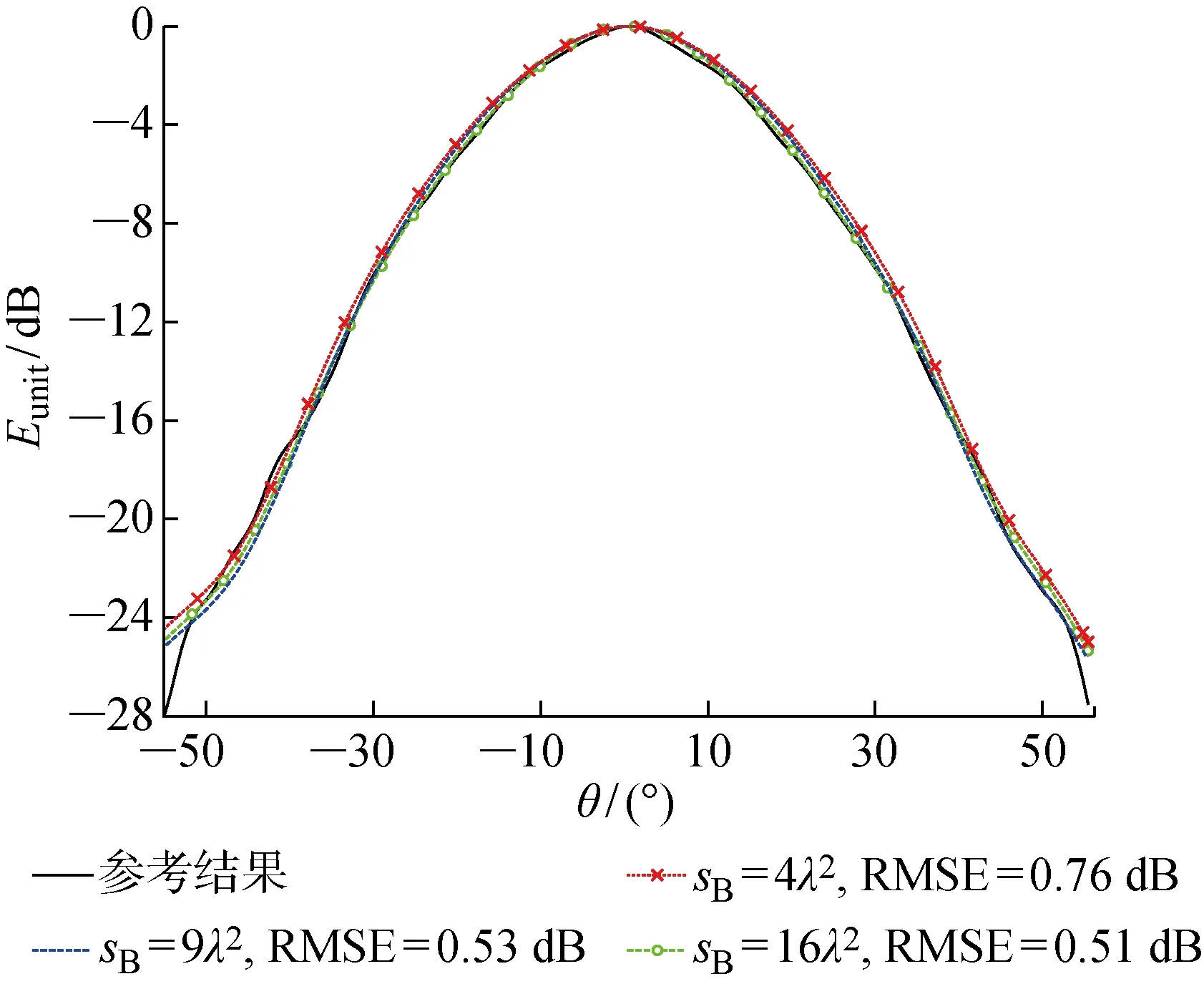
图5 不同积分面积sB下的E面方向图Fig.5 E-plane pattern for different integral areas sB
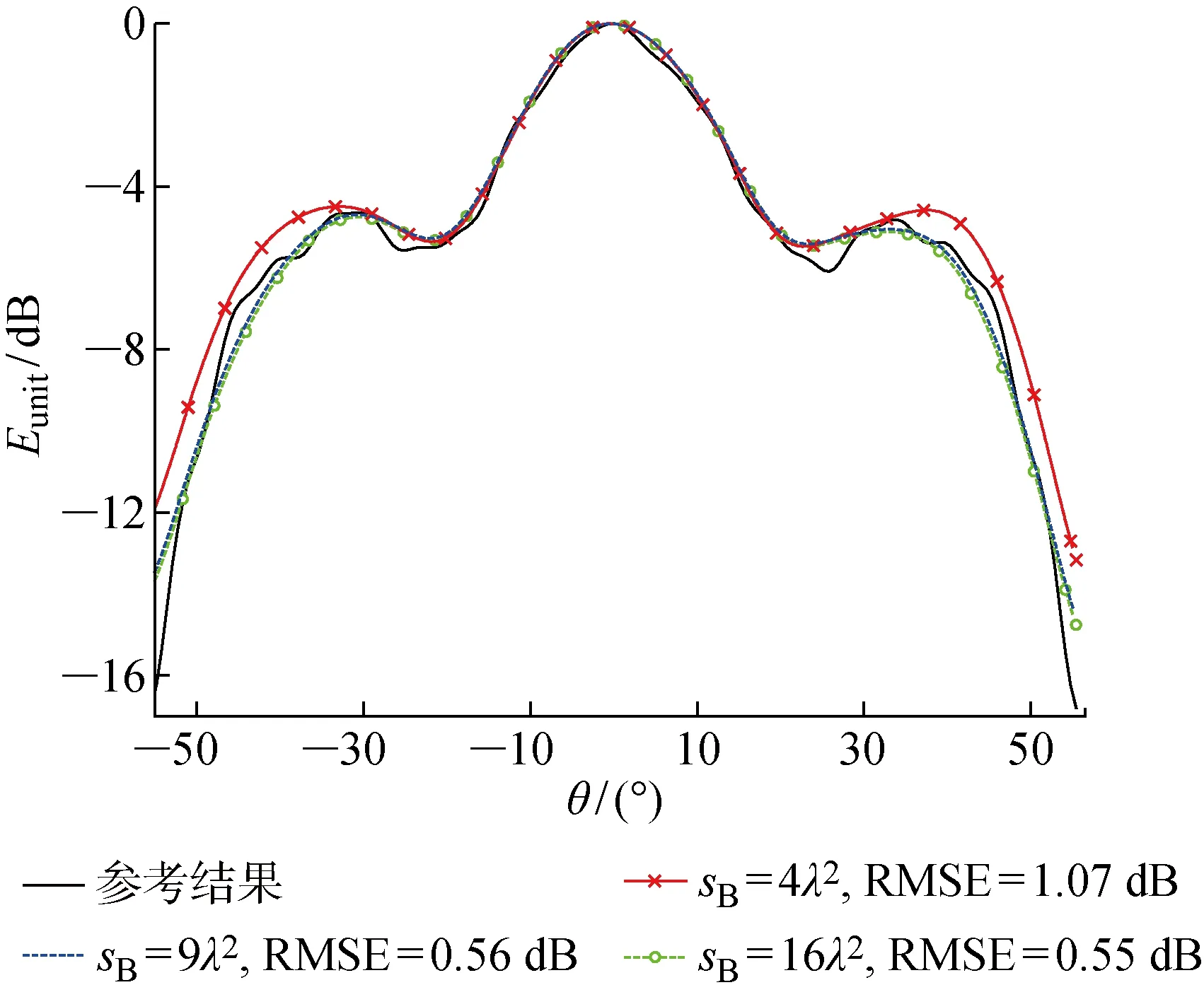
图6 不同积分面积sB时的H面方向图Fig.6 H-plane pattern for different integral areas sB
最后,在本文方法中取sB=9λ2,对σmax×10-2以下奇异值进行截断,其结果与无补偿的源重构算法[5]以及探头补偿的平面波谱算法对比.从图7和图8可以看出无补偿的源重构算法在磁面上的主瓣明显偏离参考方向图,其RMSE为2.21 dB;在E面上的RMSE也高达1.55 dB.而本文方法在两个主面上的RMSE分别为0.53 dB和0.56 dB.因此本文的探头补偿算法更准确有效.在计算时间方面,无补偿算法平均计算时间为10 s,平面波谱算法的平均计算时间为0.5 s,有补偿算法由于需要在每次探头移动后进行互易定理积分,平均计算时长为 134 s.测量算法运行一次即可得出结果,但缩短计算时间并不是该算法研究的重点.
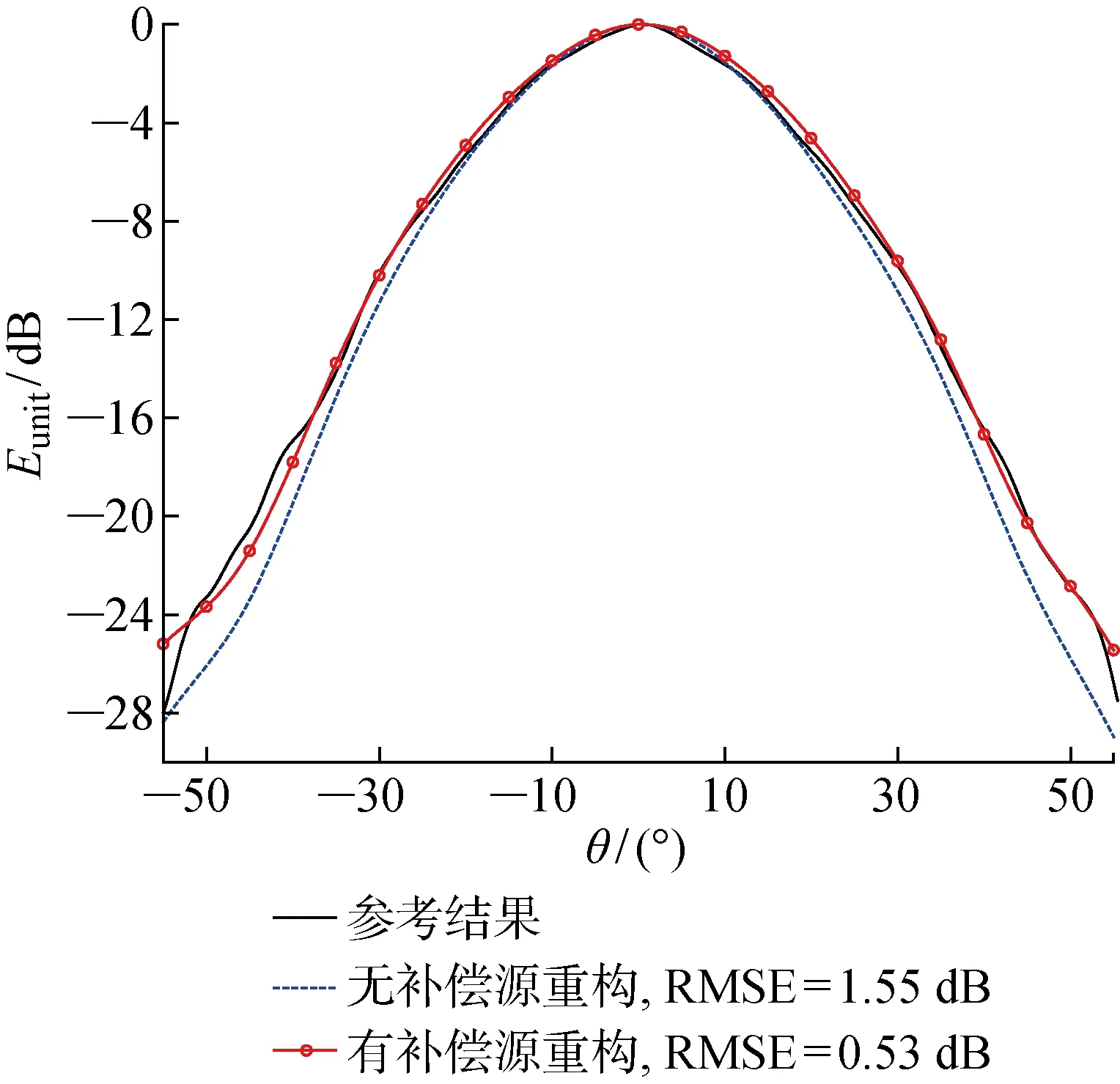
图7 喇叭天线E面方向图Fig.7 E-plane pattern of the horn computed by different methods
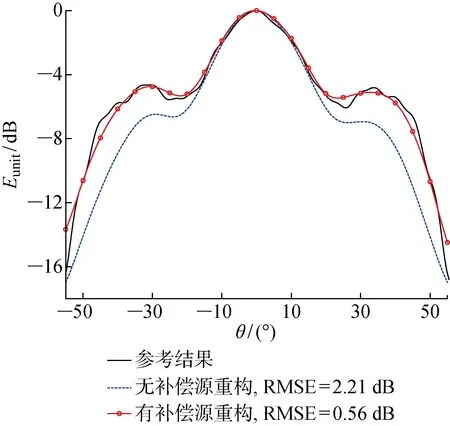
图8 喇叭天线H面方向图Fig.8 H-plane pattern of the horn computed by different methods
4 结语
本文提出一种对源重构近远场变换进行探头补偿的算法,通过喇叭天线的例子验证该方法的有效性.此外,该方法对扫描面和测量探头都没有限制.后续工作中,首先将把扫描面扩展为长方体盒子的形式,以便解决平面近场测量中对于扫描面的截断问题.其次将尝试采用多探头测量系统以提高测量效率,并通过本文方法进行补偿,以实现高精度的测量.
猜你喜欢
成都信息工程大学学报(2022年2期)2022-06-14
制造技术与机床(2019年12期)2020-01-06
中学生数理化·高三版(2019年1期)2019-07-03
中国交通信息化(2017年10期)2017-06-06
人生十六七(2016年14期)2016-12-01
电子制作(2016年1期)2016-11-07
试题与研究·高考数学(2016年1期)2016-10-13
肇庆学院学报(2016年5期)2016-03-11
现代防御技术(2014年6期)2014-02-28
海峡姐妹(2014年5期)2014-02-27
