
基于SSA-SVM的空中目标意图识别方法∗
2022-12-01 03:40吴广宇史红权邱楚楚
舰船电子工程 2022年3期
吴广宇 史红权 邱楚楚
(1.海军大连舰艇学院 大连 116018)(2.中国人民解放军91991部队 舟山 316041)
1 引言
空中目标意图识别作为态势感知的重要组成部分,通过作用于目标的威胁判断过程,进而对舰船指挥员的指挥决策产生重要的影响。因此,准确、快速地识别空中目标意图,不仅是舰船指挥员正确进行指挥决策和及时处置应对的前提和基础,更是舰船对空防御中的关键环节。
国内外的研究中,用于意图识别的方法主要包括基于贝叶斯推理的方法[1~2]、基于证据理论的方法[3]、基于模糊Petri网的方法[4]、基于模版匹配的方法[5]和基于深度学习的方法[6]等。其中前四种方法的识别结果受模型内部参数设置的影响较大,且参数一般依据专家经验设定,在参杂主观成分的同时对于复杂战场环境的适应能力不强。而基于深度学习的方法虽能通过自主学习获取参数,减少人为主观影响,但需要庞大的样本数据进行学习训练,对数据要求较高。
支持向量机(SVM)[7]作为一种基于统计学习理论的机器学习算法,通过对样本数据的自主学习,获取分类平面,可减小人为主观的影响,同时,它以结构风险最小化为原则,在小样本、多维数据的处理上效果较好,对数据的要求较低。因此,支持向量机可以较好地克服上述方法的不足。而支持向量机结果的好坏则取决于惩罚参数C和核参数,故如何寻找获取更优的惩罚参数C和核参数是研究的重点。文献[8]和[9]分别采用了传统的网格搜索算法(GSA)和粒子群算法(PSO)对上述参数进行寻优,虽然均可的到较好的结果,但却无法克服GSA存在的搜索速度慢和PSO存在的寻优能力不足导致准确率相对较低的问题。因而这两种方法用于舰船对空中目标意图识别时均无法做到既准确又快速。针对该问题,本文提出了一种基于麻雀搜索算法优化支持向量机(SSA-SVM)的空中目标意图识别方法,利用麻雀搜索算法(SSA)对支持向量机的惩罚参数C和核参数进行寻优,建立了基于SSA-SVM的空中目标意图识别模型,进行意图识别,使结果同时满足准确性和快速性的需要,并通过仿真实验对GSA-SVM、PSO-SVM和SSA-SVM的识别效果进行了对比。结果表明,SSA-SVM相比于GSA-SVM和PSO-SVM,同时具有较高的识别准确率和较短的识别运算时间,能够确保意图识别的准确性与快速性,具有更好的识别效果,证明了该方法的有效性。
2 SVM的基本原理
SVM的基本模型定义为特征空间上间隔最大的线性分类器,学习策略是间隔的最大化,在小样本分析时优势明显[10]。
对于一个分类问题,SVM首先通过核函数将样本数据的特征向量由低纬空间映射到高纬空间中,然后在高纬空间中构建一个分类超平面作为决策面,使不同标签类型样本间的隔离边缘至该平面的距离最大化。SVM的分类原理如图1所示。

图1 SVM分类原理图
图1中,样本数据集合为{(xi,yi)|1≤i≤n},xi为各样本数据的特征向量集合,yi为样本数据的类型标签,K(xi,x)为核函数,决策面函数为 f(x),其中a*为最佳拉格朗日因子,且0≤a*≤C,b*为最佳偏移量,可表示为

因此,决策面的分类性能主要受惩罚参数C和核参数的影响。
3 SSA的基本原理
SSA[11]是由薛建凯于2020年提出的一种全新的仿生算法,它通过麻雀种群的觅食行为和反捕食行为进行最优解的搜索。
麻雀作为一种群居性的鸟类,依靠种群间的协作进行觅食和反捕食。在觅食的过程中,根据分工的不同,所有麻雀可被分为三类。第一类是发现者,它们负责寻找食物的来源,并引导后续的麻雀向食物所在方向接近;第二类是加入者,它们在发现者的引导下接近并获取食物;第三类是警戒者,它们负责种群捕食过程中的警戒工作,当警戒值高于安全阈值时,及时发出警报,使种群放弃食物,向安全的区域聚集,避免成为被捕食对象。因此,SSA寻优的实质就是通过每代种群中发现者、加入者和警戒者的位置更新变化,逐步找到食物能量最高的位置,即最优解。三者的位置更新分别按式(2)~(4)[12]进行。
式(2)为发现者的位置更新,其中,t是当前代数,Tmax为最大迭代次数,为第i只麻雀第t代时所处的位置,为行向量形式,维数为d,α为(0,1]的一个随机数,Q为服从正态分布的随机数,L为一个d维且各元素均是1的行向量,R2为警戒值,ST为安全阈值。


式(4)为警戒者的位置更新,其中,β为步长控制参数,服从(0,1)正态分布,K为[-1,1]的一个随机数,fi为当前麻雀个体的适应度值,fb为当前全局中的最佳适应度值,fw为当前全局中的最差适应度值,ε为一个最小的常数,避免 fi=fw时,分母为0。
SSA的寻优过程如图2所示。

图2 SSA寻优过程图
4 基于SSA-SVM的空中目标意图识别模型
本节以舰船对空警戒探测为背景,针对巡逻机、侦察机和预警机的来袭意图,构建SSA-SVM模型进行意图识别。
4.1 空中目标的意图类别
根据所研究的目标对象,结合舰船指挥员不同的处置决策及相关领域的专业人员的研究分析,三种飞机的意图类别主要有以下四种:
1)情况察证:指目标为掌握舰船当前状态而采取的行动,包括确认舰船的国籍、型号等基本信息,以及获取舰船当前行动、各设备的配置和工作等情况。
2)特征收集:指目标为了解舰船的性能特征而采取的行动,包括实施电磁信号侦测、光学、红外、雷达成像侦察,从而获取舰船的电磁、光学、红外、雷达特性。
3)区域侦察:指目标为掌握海区内舰船的分布和运用情况,以及收集海区内的水文、气象、电磁信号等信息而采取的行动。
4)监视:指目标为实时掌握舰船的动态变化和行动信息,保持长时间的持续跟踪,并指挥引导其它目标活动而采取的行动。
4.2 空中目标的意图识别参数
意图识别参数的种类繁多,获取的难易程度各不相同。本节主要结合背景平台,选择舰船自身可获取的目标的相关信息要素作为意图识别参数。具体的参数信息如表1所示。
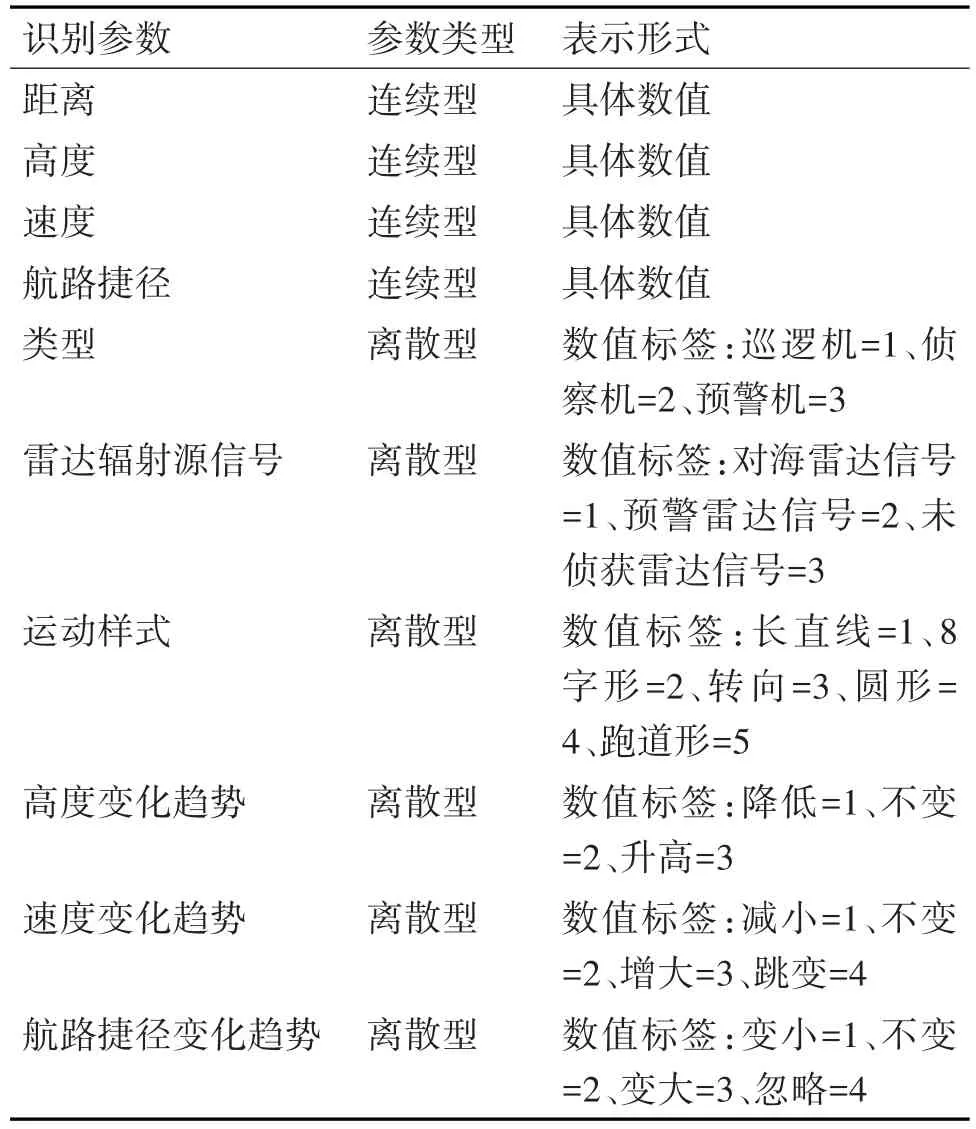
表1 意图识别参数信息
4.3 模型的组成及功能
基于SSA-SVM的空目标意图识别模型由数据预处理部分、SSA寻优部分和SVM识别部分组成。各部分的功能和相互间的信息传输情况如图3所示。
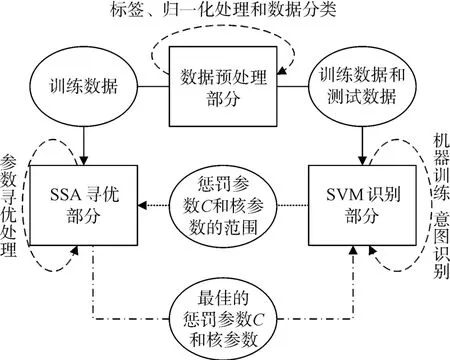
图3 模型各部分的功能和相互间信息传输情况
1)数据预处理部分
数据预处理部分首先是对目标数据中的离散型意图识别参数和各类意图进行标签化处理,转换为相应的数值标签,再对意图识别参数进行归一化处理,避免不同类型参数量纲上差异带来的影响,然后将数据按比例分为训练数据和测试数据,最后将训练数据传输给SSA寻优部分,将训练和测试数据传输给SVM识别部分。
2)SSA寻优部分
SSA寻优部分是分别接收来自数据预处理部分的训练数据和SVM识别部分的惩罚参数C及核参数的取值范围,利用SSA找出最佳的惩罚参数C和核参数,并返回给SVM识别部分。
3)SVM识别部分
SVM识别部分是先向SSA寻优部分传送惩罚参数C和核参数的取值范围,使其进行参数寻优处理,而后接收寻优后的最佳参数,并利用从数据预处理部分接收到的训练数据进行机器训练,完毕后对测试数据进行意图识别,检验识别效果。
4.4 模型算法流程
基于SSA-SVM的空中目标意图识别模型的算法流程如图4所示。

图4 模型算法流程图
算法的主要步骤如下:
1)数据预处理
将目标数据中的离散型意图识别参数和各类意图转换为数值标签,而后对意图识别参数进行归一化处理,消除量纲上的误差,并按比例对数据进行随机分类。
2)构建SVM
选择SVM的核函数,主要有线性核函数、RBF核函数、多项式核函数和Sigmod核函数四种,并设置惩罚参数C和核参数的取值范围。
3)初始化麻雀种群
设置种群的数量Size、最大迭代次数Tmax、个体的位置X(X为惩罚参数C和核参数组成的多维坐标),发现者、加入者和警戒者的比例F、J、Y,和安全阈值ST。
4)确定适应度函数
采用K-CV的分类准确率作为适应度函数值。
5)寻找全局最优位置
利用训练数据求得个体所处位置的适应度值f,值越大代表该位置越优,则全局最优位置即为f最大的位置。若多个位置的 f相同,则最优位置为惩罚参数C最小的位置。
6)更新种群位置及全局最优位置
按照式(2)~(4)更新种群的位置,按5)更新全局最优位置。
7)迭代次数条件判断
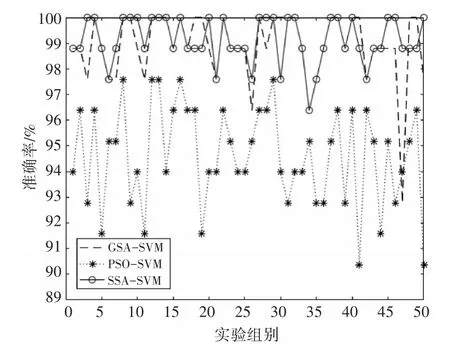
若当前代数t 8)机器训练 利用SSA寻优获得的最佳参数和训练数据对SVM进行训练。 9)意图识别和效果检验 将测试数据中的意图识别参数输入SVM中,输出运算得到的意图标签值,识别目标意图,并与测试数据中的目标实际意图进行对比,检验识别效果。 本节将对SSA-SVM、GSA-SVM、PSO-SVM的意图识别效果进行仿真分析比较。仿真环境为In⁃ter Core i5-4200M CPU 2.5GHz,采用Matlab R2016a平台和Libsvm工具箱。 1)数据预处理 选取418组目标数据,数据中的目标意图由领域专家根据实际情况结合相关经验研究分析后给出。部分数据信息如表2所示。其中意图为情况察证的有126组,特征收集的有91组,区域侦察的有72组、监视的有129组。 表2 部分目标数据信息 离散型意图识别参数的标签化处理按照表1进行。各类意图按照情况察证=1、区域侦察=2、特征收集=3、监视=4进行数值标签转换。再利用Matlab中的mapminmax函数对意图识别参数进行归一化处理。 对标签化、归一化处理后的数据按照训练集/测试集约1/4的比例进行随机分类,各意图的训练集和测试集的比例也满足1/4,则分类后训练集有335组、测试集有83组。 2)仿真参数设置 SVM的参数设置:核函数采用应用最广泛的RBF核函数,核参数为g,设置惩罚参数C和核参数g的取值范围均为[2-12,212]。 SSA的参数设置:Size=20、Tmax=20、F=0.2、J=0.8、Y=0.2、ST=0.8。 GSA的参数设置:搜索步长l=1。 PSO的参数设置:种群数量和最大迭代次数与SSA相同,局部搜索能力c1=1.6、全局搜索能力c2=1.6、弹性系数wv=0.9。 3)仿真与分析 为使空中目标意图识别模型具有更好的泛化能力,同时降低SSA和PSO中在种群初始化阶段位置分布的随机性造成的影响,对目标数据进行50次随机分类,通过50次实验进行综合分析。 经过仿真,可得到三种方法对测试数据的意图识别准确率和识别运算用时的情况对比,分别如图5和图6所示。 图5 意图识别准确率对比 图6 识别运算用时对比 图5中,从整体上看,SSA-SVM与GSA-SVM的识别准确率相当,SSA-SVM的平均准确率为99.1325%,GSA-SVM的平均准确率为98.8916%,且均高于PSO-SVM,PSO-SVM的平均准确率为94.6265%。由此可见,在空中目标意图识别的准确性方面,SSA-SVM与GSA-SVM优于PSO-SVM。 图6中,从整体上看,SSA-SVM与PSO-SVM的识别运算用时相当,SSA-SVM的平均用时为15.54846s,PSO-SVM的平均用时为 16.10552s,且均比GSA-SVM的用时少,GSA-SVM的平均用时为35.16882s。由此可见,在空中目标意图识别的快速性方面,SSA-SVM与PSO-SVM优于GSA-SVM。 综上分析可知,GSA-SVM进行意图识别时,虽然具有较好的识别准确性,但在快速性方面较差,需要更多的时间才能识别出目标意图,不利于舰船指挥员及时进行处置应对。PSO-SVM进行意图识别时,虽然识别用时较短,能够满足快速性的要求,但在识别准确性上相对较差,不利于舰船指挥员对目标情况的准确掌握。因此,两者均无法同时做到既准确又快速地识别目标意图。而SSA-SVM进行意图识别时,既具有较好的识别准确性,也能保证识别的快速性,能够满足意图识别的需要,使识别效果最佳。因此,采用SSA-SVM进行意图识别,将有利于舰船指挥员正确进行指挥决策和及时处置应对。 本文针对传统的GSA-SVM和PSO-SVM在舰船对空中目标意图识别中无法准确、快速地识别目标意图而导致识别效果较差的问题,提出了一种基于SSA-SVM的空中目标意图识别方法,建立了基于SSA-SVM的空中目标意图识别模型,并通过仿真实验与GSA-SVM和PSO-SVM进行效果对比。结果表明,相比GSA-SVM和PSO-SVM,SSA-SVM既具有较高的识别准确率,也具有较短的识别运算时间,能够同时满足准确性和快速性的需要,对空中目标意图识别的效果最佳,因而可以有效地辅助舰船指挥员正确进行指挥决策和及时处置应对。5 仿真实验


6 结语
猜你喜欢
舰船科学技术(2022年21期)2022-12-12
法律方法(2022年2期)2022-10-20
今日农业(2022年15期)2022-09-20
舰船科学技术(2022年10期)2022-06-17
福建基础教育研究(2022年4期)2022-05-16
舰船科学技术(2021年12期)2021-03-29
法律方法(2021年3期)2021-03-16
生物学教学(2018年3期)2018-08-08
中学生物学(2018年8期)2018-03-01
延河(下半月)(2014年3期)2014-02-28
