
自适应多智能体算法优化深度网络的列车智能驾驶
2022-11-30 13:02徐凯涂永超徐文轩吴仕勋
铁道科学与工程学报 2022年10期
徐凯,涂永超,徐文轩,吴仕勋
(1. 重庆交通大学 信息科学与工程学院,重庆 400074;2. 重庆大学 电气工程学院,重庆 400044)
列车自动驾驶ATO系统利用车载固化信息和地面通信实现对列车牵引、制动的控制,可使列车处于更佳的运行状态,提供更优的区间运行模式,提高旅客舒适度、行车密度和准点率[1]。列车控制算法是列车自动驾驶ATO系统的核心技术,将其研究分为两方面:一方面是ATO控制曲线的生成与优化,另一方面则是对生成速度曲线的跟踪控制。随着对列车多目标速度优化曲线研究的深入,如将粒子群优化算法与布谷鸟搜索相结合[2],差分进化算法和非支配排序遗传算法相结合[3]等智能算法被广泛应用于列车多目标的智能驾驶中;在速度曲线跟踪控制方面,提出了基于分数阶PID的控制方法[1]以及列车自动驾驶非线性模型预测控制算法[4]。优秀司机的驾驶策略在能耗和舒适度上的表现比ATO更为优越[5],对此,冷勇林等[6-7]结合专家系统,开发在线优化算法实现列车智能驾驶。将列车优秀驾驶员操纵数据称为“专家知识”,目前,它们尚处于“只存不用”的状态。倘若采用数据挖掘和机器学习的方法对“专家知识”充分利用,从海量数据中自动地发现隐藏于其中的规律性信息,将优秀司机驾驶策略应用于列车智能驾驶中,这不失为一种可行实用的方法。以上专家知识和经验,可从设计资料、列车运行监控装置LKJ、列车控制与管理系统TCMS设备上获取。基于数据驱动的机器学习方法是实现列车智能驾驶的常用手段。HUANG等[8]结合随机森林和支持向量机2种机器学习方法实现列车自动驾驶。李国华等[9-10]采用集成随机森林和CART等算法挖掘优秀驾驶数据。朱宇清[11]则提出一种BP浅层神经网络学习的货运列车控制方法。现有的优秀驾驶员操控模式学习方式,大多采用传统机器学习和浅层神经网络方法。在面对海量列车运行数据时,其特征表达不强、学习能力不足,不能全面反映列车运行状态,致使列车操控和预测精度不佳。因此,引入基于大数据的深度学习网络,从列车状态和环境中挖掘出所隐含的信息,并泛化出对未知状态的适应能力,用以实现列车智能驾驶。在深度学习网络中,卷积神经网络CNN的卷积运算特性决定其适用于处理具有网格状结构数据,它对于局部操作有很强的抽象表征能力,已广泛用于计算机视觉、语音和自然语言处理等各领域。对列车运行控制而言,其本质是一系列具有时间属性的档位和速度组合,而长短期记忆神经网络LSTM具有时序性特点,特别适用于对列车运行特征的表达。然而LSTM的结构设计涉及到网络的层数和节点数,属于超平面优化问题。目前通常依靠领域专家的经验知识,采用人为设定网络结构,具有随机性和盲目性[12]。若层数和节点数设计过少,则网络学习能力有限;若层数和节点数设计过多,则网络将过拟合,泛化能力较差。此外,LSTM超参数众多,是在一个维度极高的空间内,其优化是个非凸优化问题。非凸优化的主要难点是如何选择初始化参数和逃离局部最优点[13]。其中,对参数初值的选取十分关键,直接影响网络优化效率和泛化能力。然而在深度学习中最常用的Adam算法却难以解决上述问题,并在某些情况下可能不收敛。同时,朱海楠[14]构建深度神经网络对列车驾驶策略进行特征学习,所使用的网络仅针对单一回归学习任务,不能全面预测列车运行状态。李国华等[9]也分别使用4个模型来实现4个不同的任务,这仅属于单任务学习。而此处列车输出控制包括用于列车档位操纵的分类任务,同时还包括列车档位运行时间和速度预测的回归任务,它涉及到多个决策任务。若采用单任务学习方式,需要多个神经网络,不仅设计繁杂,信息冗余而且训练耗时。倘若仅用一个LSTM网络实现多任务学习,利用任务间的关联性来相互促进学习,不仅简化网络设计,且所得到的多任务学习网络比单任务具有更好的泛化效果[15]。但在多任务学习过程中,如何合理地处理不同任务之间的共性与差异,采用恰当的学习机制需要进一步地探讨和研究。因此,针对上述2个问题,本文做了以下两方面的工作,通过实验验证了所提模型的优越性和鲁棒性。第一,LSTM结构和超参数的初始化设计。在利用深度学习实现列车智能驾驶时,需要从深度网络类型和结构,以及优化算法等几方面充分考虑。具体地,在遗传算法GA优化LSTM结构基础上,结合多种群协同进化方式,提出一种新的自适应多种群链式多智能体算法(Adaptive Multi-Population Chainlike Multi-Agent,AMPCMA),用以对网络权值和阈值等参数进行初步寻优。从而解决了LSTM结构设计盲目和参数初始化的困难。第二,实现了档位分类、档位操纵时间和速度预测回归的多任务学习。通过设计有效的多任务学习机制,即共享LSTM网络输入特征、网络底层模块,并采用Adam算法对各特定任务层的参数精细优化,将任务共性与个性学习有机结合,实现了精准、有效的列车多任务决策。
1 智能计算分步优化的LSTM模型
1.1 LSTM神经网络
图1所示为LSTM单元结构。
LSTM引入了遗忘门、输入门和输出门,分别决定信息的遗忘、保留和输出程度。其中各个门涉及到的计算公式如下。
式中:ft,it,ot分别为t时刻遗忘门、输入门和输出门的输出;c"t,ct,ht分别为t时刻候选记忆单元,记忆单元和隐含层的状态;Wf,Wi,Wo,Wc分别为遗忘门,输入门,输出门及候选记忆单元的权重矩阵;bf,bi,bo,bc分别为其对应偏置项;xt为t时刻的输入;[ht-1,xt]为2个向量的拼接;σ表示激活函数sigmoid,⊙表示向量元素乘积。
由图1可见,LSTM网络中的权重W=[Wf,Wi,Wo,Wc]和阈值b=[bf,bi,bo,bc]等参数通常是随机赋初值,然后利用Adam等算法进行优化。
1.2 自适应多种群链式多智能体算法(AMPCMA)
1.2.1 链式多智能体
智能体能够感知环境,相互通信,具有智能思维与智能行为。一个智能体代表问题的一个解。图2所示为链式多智能体结构,每个圆圈为一个智能体,依次相联为封闭的链式结构,形成一个智能体链表。链表上每个智能体都有左右2个邻居为其邻域环境。所有智能体的邻域共同构成该链表的局部生存环境。每个智能体通过竞争,交叉,变异以及自学习完成进化。链式结构的引入,缩小了智能体竞争范围,加快算法比较速度。图中,i=1,2,…,L为智能体在链表中的位置,L为链表规模。
1.2.2 AMPCMA进化框架
吴亚丽等[16]提出了一种链式多种群多智能体(CMPMA)算法,它在高维问题优化上表现出良好性能。然而,该算法所设计的链表规模是固定的,是一种静态链表,从而降低了算法的灵活性和自适应性。与其不同的是,本文所提出的AMPCMA算法能在进化过程中根据各小种群的贡献程度,自适应地调整小种群链表规模,让其成为一个可伸缩的“弹性”链表;此外,文献[16]中仅采用测试函数验证其性能指标,而未对深度神经网络的结构和参数配置进行寻优,更没结合实际工程应用,降低了问题研究的深度和实用性。
图3所示为本文所提AMPCMA算法的进化框架,具体思路如下:
1) 多种群协同进化。一个多智能体链表形成一个小种群。多个小种群协同进化,在全局寻优中,以恰当的通信周期,实现种群间的信息交互。
2) 全局寻优。各小种群链表上的多个智能体进行竞争,交叉和变异,实现自我更新。根据各个智能体链表的优劣,自适应地调整链表的规模,即将优质链表的规模扩大,缩小表现不佳的链表规模,让各小种群智能体链表“弹性化”。此外,种群间以适当通信周期进行信息交互,提高了种群多样性,避免算法陷入局部最优,提高全局收敛能力。
3) 局部寻优。每个小种群链表输出一个精英智能体,以特定方式生成局部小种群,经自学习得到最优智能体,此最优智能体经比较后输出。
1.2.3 AMPCMA具体实现
1) 多种群。由图3可见,Pi表示第i个小种群,i=1,2,…,n,n为种群个数。
2) 种群进化的4种规则
① 竞争。在智能体链表中,若某智能体Ai=(a1,a2,…,ak,…,ad)优于其邻域内的最好智能体Hi=(h1,h2,…,hk,…,hd),则保留Ai,否则生成新智能体取而代之。生成过程为:给 定 占 据 概 率Ps,对A′i中 每 一 维 变 量a′k,若U(0,1)<Ps,则
否则,
式中:k=1,2,…,d,d为智能体维度;U(-1,1)为(-1,1)间均匀分布的一个实数;xkmax和xkmin分别为第k维变量ak取值上下限;r1和r2为[0,1)间均匀分布的随机数。
② 交叉。每个智能体以概率Pc与链表中其余一个智能体随机交叉,产生新智能体取代当前智能体,采用单点交叉方式。
③ 变异。某智能体Ai=(a1,a2,…,ak,…,ad)的每一维变量ak,以概率Pm变异,得到新智能体Mi=(m1,m2,…,mk,…,md)。其变异过程为:
④ 自学习。指在精英智能体附近生成一个局部小种群,然后对其实施竞争和变异操作,经演化后得到一个最优智能体。这个局部小种群初始时只有一个智能体Eij=(e1,e2,…,ek,…,ed),Eij表示第i个小种群输出的精英智能体,在链表中对应的位置为j,i=1,2,…,n,n为种群个数,j=1,2,…,L,L为智能体链表规模。在精英智能体附近按式(10)生成新智能体
式中:xkmax和xkmin分别为第k维变量ek取值上下限,mR∈[0,1]表示局部搜索半径,U(1-mR,1+mR)为(1-mR,1+mR)间均匀分布的一个实数。
3) 小种群链表规模的自适应调整方法
在全局寻优中,针对文献[16]算法中小种群链表规模固定不变,将造成算法性能下降的问题,这里采用自适应、动态调整链表规模的方式来解决。每次进化时,经过竞争、交叉和变异后,将产生的新智能体链表送至小种群规模调整控制模块。该模块根据各小种群的贡献率,在保持总智能体数量不变的条件下,动态调整各小种群链表规模,让各链表具备“弹性”伸缩的功能。具体的调整过程如下。
首先,按式(11)计算每个智能体k的适应度fk,其中e为网络3个输出量的误差总和。
按式(12),计算第i个种群平均适应度Fi。
式中:li表示小种群Pi调整前的链表规模。
依据式(13),计算出每个小种群的贡献率τi。
式中:n是小种群的数目。
然后,将各小种群的贡献率τi从大到小排序,按式(14)计算各小种群链表Pi调整后的规模δi。
式中:i=1,…,n,n为种群数目,N为智能体总数。
最后,完成对链表的伸缩调整。根据式(15),判断各个小种群所增加或者减少智能体的数目Δi。
对链表的伸缩调整,可分以下3种情形:
1) 若Δi>0,则该小种群链表Pi需增加智能体,即拉伸。将该链表上的原有智能体按适应度从大到小排序,由大到小克隆前Δi个智能体加入链表中。
2) Δi=0,则该小种群链表Pi无需改变。
3) 若Δi<0,则该小种群链表Pi需减少智能体,即压缩。将该链表上的智能体按适应度从大到小排序,由小到大逐一删除后|Δi|个智能体。
另外,为避免某一种小种群链表强占优于其余小种群链表,调整时需遵循以下2个原则:① 小种群链表最大规模的上限增至初始规模的80%;② 小种群最小规模的下限减至初始规模的30%。
4) 种群之间的信息交互操作
每当算法演化一定代数时,随机选取2个种群Pi和Pj进行交互,即用种群Pi的历代种群所产生的最优智能体取代Pj种群中较差的智能体。
1.3 多任务学习实现
图4所示为本文所采取的学习机制。
这里采用硬参数共享的多任务学习机制来实现列车操控与预测。即在所有任务的底层中共享部分参数,在特定任务的顶层中使用各自任务的独有参数。硬参数共享网络通过共享输入层和LSTM隐层来学习特征表示,在输出端为各任务设计单独的分类、回归器。这种硬参数共享机制适用于各任务相关性较高的场景,提高了网络的泛化能力[17],因此可将其用于列车智能驾驶。
在此多任务学习机制中,对网络参数的优化分为2个阶段。第1阶段是参数的初值预置,即利用AMPCMA算法对网络权值和阈值等参数进行初步寻优,将3种任务的误差总和作为网络训练目标,对多任务共性进行学习;第2阶段是参数的精细优化,即针对不同任务的个性,采用Adam算法对各特定任务层参数精细优化,将各任务的误差作为网络训练目标,分别对单任务的个性进行学习。通过以上方式,最终实现多任务共性和个性学习的有机结合,改善网络预测效果。
1.4 基于智能计算分步优化LSTM算法流程
首先,神经网络结构决定其信息处理能力,而网络结构一直是依靠领域专家的经验设计,这种人工设定方式具有随机性和盲目性。其次,神经网络参数的优化算法众多,其中Adam优势明显,在深度学习中使用较多。而本文优化的参数有1 747个,这是一个维度极高的非凸优化空间,若参数初值选择不当,将影响网络优化效率和泛化能力,而常用的Adam算法却难以解决上述问题。
因此,这里分步骤、分阶段并结合多智能算法优化LSTM网络。第1步采用GA优化网络结构;第2步利用AMPCMA和Adam算法优化参数。图5所示为其流程图。
2 仿真实验及分析
列车运行两目标优化就是在满足安全、平稳和精确停车等条件下,做到让列车运行时间短且能耗低。首先从列车运行监控装置、控制与管理系统获取重庆轨道3号线郑家院子到唐家院线路的1 440条司机驾驶曲线数据。然后将驾驶数据的能耗和时间在两维坐标轴上进行Pareto支配,剔除被支配解,再经拥挤距离裁剪得到均匀分布的147条驾驶曲线数据,将其定义为优秀驾驶员数据。接着用随机森林算法筛选出15个优质输入特征,包括线路、列车、列车运营和运行参数,见表1。
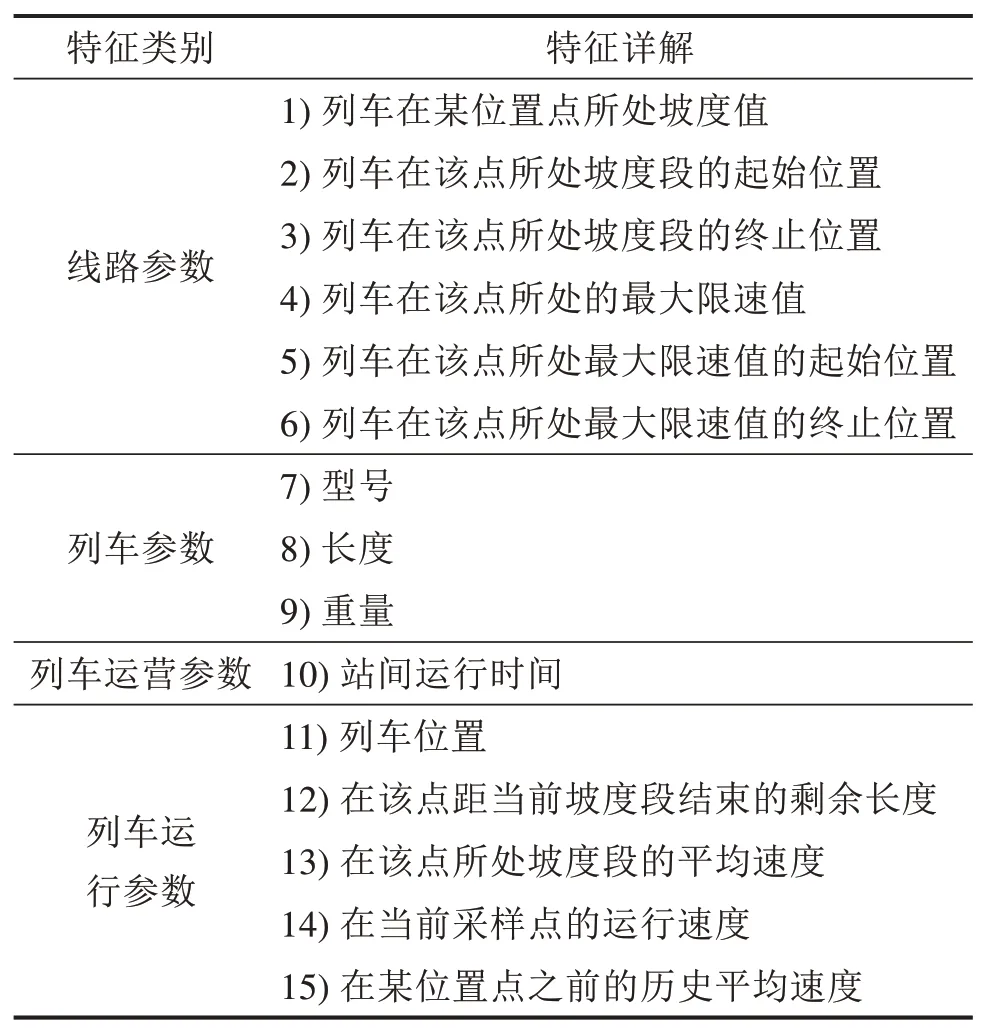
表1 LSTM网络输入特征Table 1 Input features of LSTM network
2.1 参数设置
1) 线路和列车参数。其参数如表2。
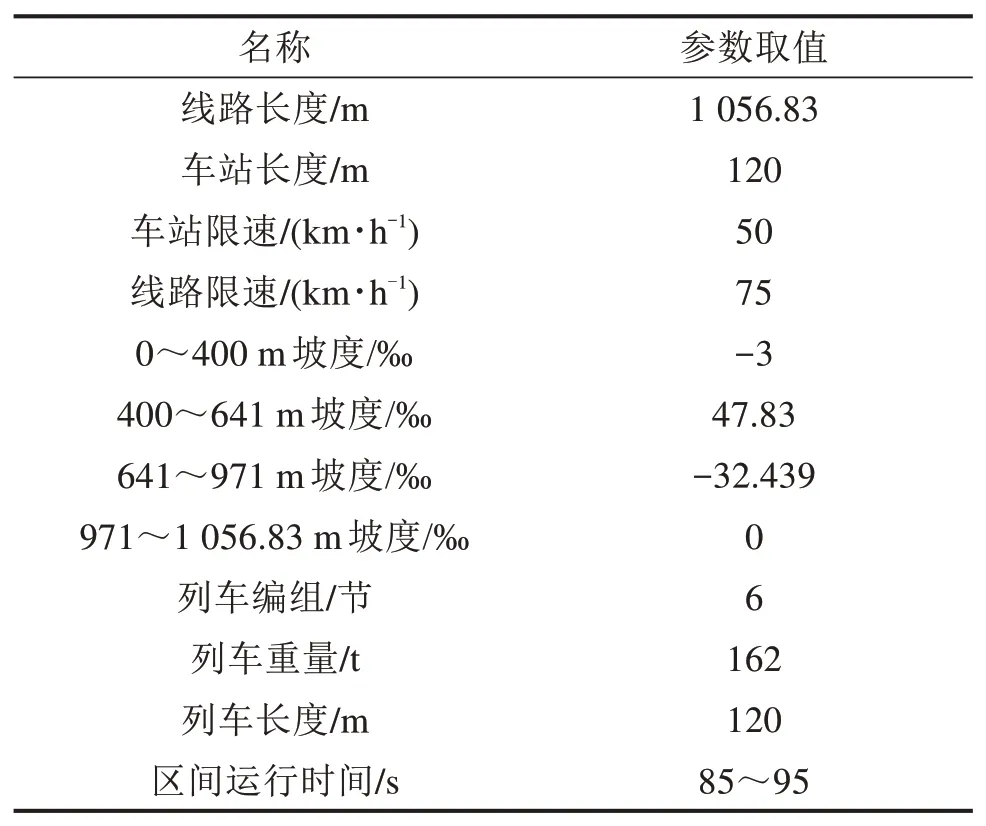
表2 线路和列车参数Table 2 Line and train parameters
2) 列车操纵档位、加速度值。列车档位共分8档,包括+3,+2,+1这3个牵引档,加速度分别为0.8,0.4,0.2 m/s2;0这个惰行档,加速度为0;-1,-2,-3,-4这4个制动档位,加速度分别为-0.2,-0.4,-0.6,-0.8 m/s2。此外,列车输入控制序列数为7。
3) 算法参数。GA中,网络隐含层及节点数量范围分别设为[1,4]和[6,15],最大迭代次数100。AMPCMA中,有5个小种群,每个小种群有10个智能体,最大迭代次数80,信息交互周期为10代,自学习中进化代数为10,局部进化的链表规模为5,占据概率0.5,交叉概率0.48,变异概率0.08。
2.2 网络评价指标
1) 正确率acc。
该值越大,表示档位操纵正确率越高。
2) 交叉熵损失J。
式中:n为样本数;c为类别数;是第i个样本第k类标签值;表示第i个样本预测为第k类标签值的概率。J越小,档位输出误差越小。
3) 均方误差MSE。
4) 平均绝对误差MAE。
MSE和MAE 2个指标中,n为样本数,yi和y′i分别为真实和预测值。它们均用于评价列车档位运行时间和列车速度预测误差,其值越小,网络预测越准确。
2.3 深度模型结构的确定与性能分析
本节通过实验确定LSTM网络结构,在此基础上采用不同算法优化网络参数,以验证所提模型的优越性,并进一步验证该模型的鲁棒性。
1) LSTM网络结构的优化
采用GA优化LSTM结构,图6为优化过程。其中图6(a)为LSTM隐含层数量优化过程:依次淘汰的是1,4和3个隐含层,当迭代至65次时,稳定在2个隐含层。究其原因,较少隐含层不能充分表达网络特征;而较多隐含层则对数据特征表达过度。最终确定的结构为2个隐含层,其节点数依次为10和8。图6(b)为网络损失值变化曲线,其中网络损失值是LSTM网络3个输出的损失值总和,其值随着迭代次数增加而不断下降,最终稳定于0.34。
2) AMPCMA-LSTM模型优越性验证
针对前言所提问题,在前述LSTM结构基础上,采用AMPCMA和Adam分阶段、粗与细学习相结合的方式全面优化网络参数。AMPCMA具有良好的全局搜索能力,旨在寻找网络最优初始参数,使其收敛到一个泛化能力强的全局最优解。因此,先用AMPCMA对参数进行预训练初始化,再采用Adam对参数精调。该寻优方式取代了原有参数随机赋初值训练方法,降低了网络调参难度,优质的初始参数加快了网络训练和收敛速度,提高了网络性能。
基于上述分析,可得到用于列车精准操控和预测的AMPCMA-LSTM模型。为验证该模型的优越性,将其分别与前馈神经网络,传统机器学习方法,深度LSTM网络以及经典的PSO和GA优化的LSTM网络进行对比分析,其结果见表3。

表3 不同模型各评价指标统计结果对比Table 3 Statistical results comparison of various evaluation indicators of different models
由表3明显看出,BP与MLP的各项指标都较差。这是因为前馈网络无记忆功能,难以表达时序特征,从而预测效果不佳;传统学习方法SVM和SVR则分别用于分类和回归,由于这2种方法指向性更强,其MSE和MAE指标比前馈网络有所改善。
其次,除列车速度的MSE和MAE指标外,LSTM,PSO-LSTM和GA-LSTM的其余指标均优于前馈网络和传统机器学习。这是因为LSTM具有深度和时序记忆特点,能全面、动态学习驾驶数据,从而多项指标均有较大改善;此外,引入PSO和GA初步搜索LSTM参数,各项指标又得到进一步改善。
特别地,在表3所有模型中,AMPCMALSTM所获得的各项性能指标均为最佳。其中列车档位操纵正确率是最为重要的指标,所提模型比性能最差的BP提高了13.184%,比性能很好的GA-LSTM也能提高1.046%。上述实验验证了所提模型的优越性,能实现更精准的列车操控和预测。
虽然所提模型比前馈网络和传统机器学习方法耗时长,但却是3种不同智能算法优化LSTM用时最少的。用较长训练耗时换取各项性能指标大幅改善是合理的,这符合算法改进的基本准则[18]。并且,可通过多CPU并行处理的方式来解决训练时长的问题。
3) AMPCMA-LSTM模型鲁棒性验证
前述实验是列车在操控序列数为7的情况下进行的。实际上列车在自动驾驶中还存在多种工况序列。因城轨交通站间距离较短,列车在行驶中工况转换点不宜过多。为验证AMPCMA-LSTM模型的鲁棒性,采用列车操控序列数分别为4,5,6和7下的数据进行实验。在4种操控序列下,将算法分别独立运行30次,统计对比各评价指标,其结果见图7。
由图7(a)和7(b)可见,随着操控序列长度的增加,交叉熵损失J逐渐变大,其档位正确率也随之下降,但始终稳定在94.62%~95.51%,变化幅度在1%的微小范围内;由图7(c)和7(d)知,档位运行时间、速度预测误差的MSE和MAE 2项指标均在小范围变内化,趋势平缓。该实验证明所提模型在不同操控序列下具有良好的适应性和稳定性。
图8所示为4种操控序列下的档位值及其速度曲线。在不同长度的操控序列下,使用所提出的模型,列车操纵档位预测和真实值间仅有少许出入,速度预测与真实值的吻合程度较高;其次,从图8(d)和8(d′)还可看出,随着操控序列长度的增加,操控次数变多,操控错误概率也随之增加,这是一种必然现象。
3 结论
1) 从自动化深度学习的角度出发,重点采用无梯度搜索方法,分步骤、分阶段并结合多种智能算法优化LSTM网络结构和参数,进一步提高列车操控和预测精度。所提出的AMPCMA-LSTM模型与经典及改进的学习方法相比,档位操纵精度提升至94.627%,档位运行时间和列车速度的MSE值分别降至0.002 43和0.003 42,具有明显的优越性,并在不同操控序列下,对应各指标变化微小,表现出良好的适应性和鲁棒性。
2) 通过有效的多任务学习机制,即共享网络输入特征,网络底层模块以及优化算法等知识,将任务共性与个性学习有机结合,所提出的模型能实现列车档位、档位操纵时间以及速度的多任务决策,从而更加全面地掌握列车运行状态,实现更为精准的列车智能驾驶。
猜你喜欢
应用心理学(2022年5期)2022-11-05
今日农业(2022年15期)2022-09-20
北京大学学报(自然科学版)(2022年1期)2022-02-21
现代信息科技(2021年21期)2021-05-07
智富时代(2018年9期)2018-10-19
智富时代(2018年9期)2018-10-19
生物学教学(2018年3期)2018-08-08
中学生物学(2018年8期)2018-03-01
中国新技术新产品(2016年23期)2016-12-26
中学生物学(2008年6期)2008-08-29
