电动飞机螺旋桨动平衡试验研究
2022-11-28 11:20:02项松吴承雨赵为平张业伟刘远强
航空科学技术 2022年11期
项松,吴承雨,赵为平,张业伟,刘远强
1.辽宁通用航空研究院,辽宁 沈阳 110136
2.沈阳航空航天大学,辽宁 沈阳 110136
新能源电动飞机具有零碳排放、低噪声、使用维护方便、运行成本低等优点,已经成为世界航空业关注的焦点。近年来,在全球范围内兴起了新能源电动飞机技术研发热潮,截至2022 年5 月,全球约有700 个在研的电动飞机项目。我国也高度重视电动飞机的发展,2019年,中国航空研究院发布了《电动飞机白皮书》[1]。梁向东[2]根据电动飞机研究现状,通过分析电动飞行器的高能量密度和气动优化设计技术展望了电动飞行器的发展趋势。李开省[3]指出电动飞机技术是未来航空工业的发展方向。范振伟等[4]通过借鉴美国等航空产业大国经验提出了我国电动飞机发展的建议。王妙香[5-6]综述了美国国家航空航天局(NASA)亚声速大型电推进飞机关键技术,对我国电推进技术研究具有参考意义。穆作栋[7]分析了电推进技术在城市空运、短途运输等领域内的应用,提出了混合电推进技术是未来主要的解决方案。
电动通用飞机普遍采用螺旋桨产生拉力,螺旋桨振动原因包括质量不平衡和气动不平衡两个方面,本文主要研究质量不平衡。质量不平衡是由于螺旋桨—桨罩各部分的质量不能相互平衡,整个螺旋桨—桨罩的重心不在桨轴轴线上。质量不平衡的螺旋桨—桨罩旋转时,其产生的惯性离心力的大小与桨叶角大小无关,而只随转速的变化而变化。因此,前推油门杆,如果振动随着转速的增大而增大,则可判定为质量不平衡引起的振动。气动不平衡是由于螺旋桨旋转时,各片桨叶的空气动力大小不等。主要的影响因素是桨叶变形,桨叶安装角不符合规定。判断螺旋桨振动是否由空气动力不平衡引起,基本方法是检查和测量各桨叶的桨叶角。
在螺旋桨振动特性测试方面,国内外学者开展了大量的研究,其中郭海东、牛宏伟等[8]为了在试飞过程中对螺旋桨桨叶载荷进行测量,设计了一套遥测系统来实现桨叶应变信号传输,为后续螺旋桨载荷测量试飞提供了可靠的技术保障。程文华[9]发现螺旋桨飞机在飞行过程中有多种振源的扰动,设计了一种机载振动实时测试系统,采用飞行试验进行机体动态响应测试,用于评估飞机的振动特性,该方法对螺旋桨飞机的振动评估具有重大意义。屈玉池[10]建立某型号螺旋桨的动力学模型,采用锤击方法进行螺旋桨振动传递试验,并分析了传递路径,得到了螺旋桨到输出机匣的振动传递率,并根据振动传递率对机匣测量振动进行修正,将其结果应用于叶片振动应力计算。葛漫江、王凯[11]分析了螺旋桨振动的原因及特点,采用电子闪频仪对螺旋桨振动进行测试与排除,有效地解决了外场排故的难点,缩短了排故时间,提高了飞机利用率。项松、杨凤田等[12]为了防止螺旋桨在工作时发生共振,利用ES-2-150 振动试验系统对碳纤维复材螺旋桨和木质螺旋桨进行了振动特性试验,采用谐振搜索与驻留方法测量出螺旋桨的固有频率,通过比较两种螺旋桨的固有频率,最终选用碳纤维螺旋桨作为该型电动飞机的拉力产生装置。田傲[13]提出了一种螺旋桨振动的测试方法,采用无线电近距测量系统对试验数据进行采集记录,并在某型飞机的实际测试上取得较好效果而得到局方认可,该试验方法可为其他飞机进行螺旋桨振动测试提供参考。
目前,国内外学者主要通过模态试验、飞行振动测试、扫频振动测试等方法,开展燃油飞机螺旋桨振动特性测试,而电动飞机螺旋桨动平衡试验研究鲜见报道。本文采用DYNAVIBE动平衡仪对某型双座电动飞机、某型四座电动飞机、某型电动水上飞机进行螺旋桨外场动平衡,测量出电机架振动速度,并识别出不平衡位置,在不平衡位置加180°方向粘贴质量块,取得了较好的平衡效果。
1 试验方法
为降低螺旋桨振动水平,需要对螺旋桨进行动平衡,并控制振动值在可接受范围内。工程中通常是将螺旋桨安装在飞机上以后,再对螺旋桨和桨罩进行动平衡配平,这需要使用专业的动平衡仪进行操作,本次试验使用的是DYNAVIBE动平衡仪,该动平衡仪可以测量出转速、振动速度、不平衡位置,对于电动飞机螺旋桨动平衡具有较高的适用性。DYNAVIBE动平衡仪如图1 所示。振动速度标准为:完美(0~0.04)、极好(0.04~0.07)、好(0.07~0.15)、一般(0.15~0.25)、不佳(0.25~1.00),如图2所示。试验方法流程如图3所示。

图1 DYNAVIBE动平衡仪Fig.1 DYNAVIBE dynamic balancer
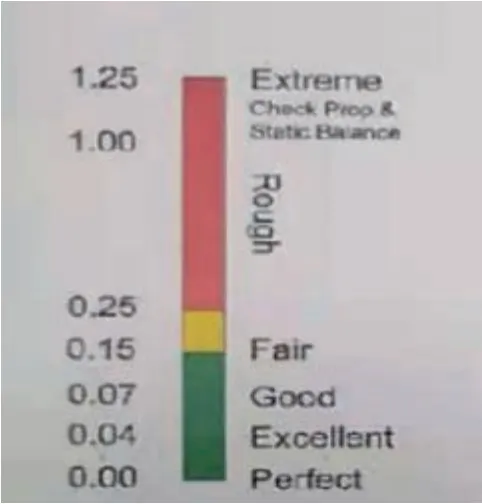
图2 振动速度标准Fig.2 Standard of vibration velocity

图3 试验方法流程Fig.3 Test method flow chart
确保电源开关是关闭的,小心地旋转螺旋桨,直到转速传感器背面的小灯亮起,这是0°的位置。DYNAVIBE指示的角度是螺旋桨—桨罩组件最重位置的角度。例如,如果系统显示90°时0.25IPS,90°就是不平衡量的位置,需要在另一侧(270°、90°+180°)的方向上增加重量(质量)。传感器安装示意图如图4所示。
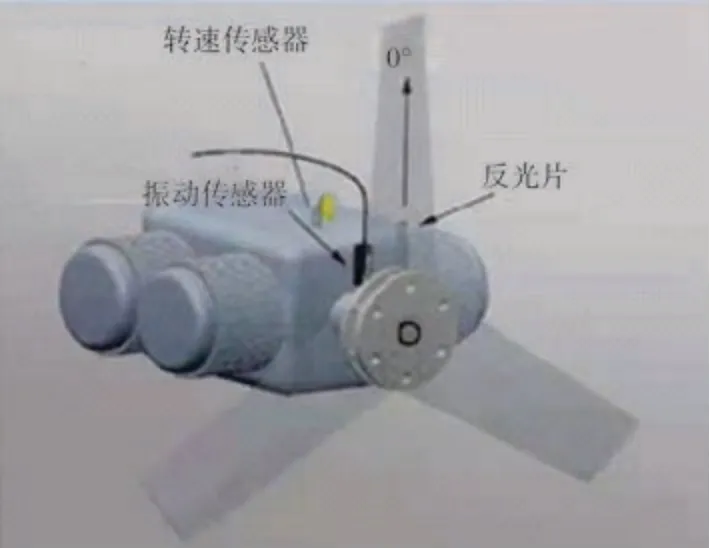
图4 传感器安装示意图Fig.4 Schematic diagram of sensor installation
2 试验结果
2.1 电动四座飞机
RX4E 电动四座飞机是由沈阳航空航天大学和辽宁通用航空研究院所研制的新能源通用航空飞机,其布局形式为上单翼、低平尾、前置螺旋桨、前三点式不可收放起落架,飞机翼展13.5m,机长8.4m,起飞重量达1200kg,最大功率为140kW,巡航速度为200km/h,续航时间为1.5h,航程为300km。在RX4E 电动四座飞机上安装转速传感器和振动传感器,安装完成后飞机进行地面测试,当螺旋桨转速达到2500r/min时,螺旋桨振动速度达到最大值。转速传感器和振动传感器安装位置如图5所示。
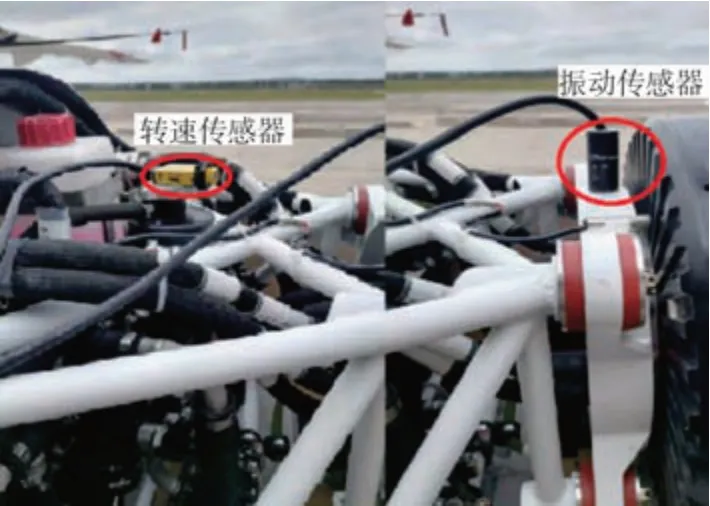
图5 四座电动飞机传感器安装Fig.5 Sensor installation of four seat electric aircraft
电动四座飞机平衡结果:平衡前电机架振动速度为2.93in/s,仪器显示不平衡位置在320°,根据使用说明书要求,在140°位置加配重如图6所示,振动速度降为0.2in/s,在座舱内感觉座椅振动明显降低。为了验证动平衡效果,采用AHAI3001 型工作测振仪开展了飞行振动测试,AHAI3001型工作测振仪采用了全数字信号处理技术,支持对1s时间和一段时间的振动加速度、速度、位移的峰值、峰峰值、有效值同时进行测量。该型号测试仪如图7所示。

图6 四座电动飞机配重位置Fig.6 Counterweight position of four seat electric aircraft
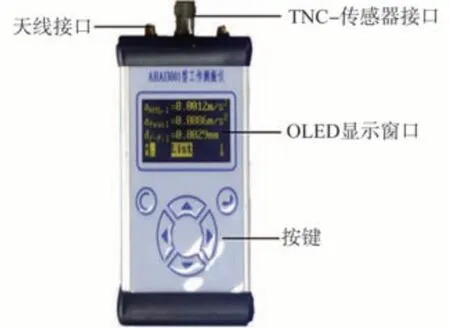
图7 AHAI3001型工作测振仪Fig.7 AHAI3001 working vibration meter
振动传感器位于仪表板上方,如图8所示,经过飞行试验,振动速度有效值为9.5mm/s。1/3OCT频谱如图9所示。

图8 显示仪表与传感器位置Fig.8 Position of display instrument and sensor
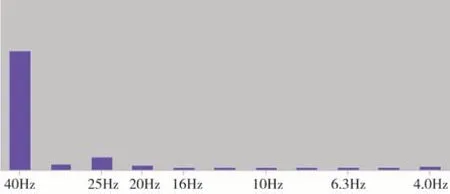
图9 1/3OCT频谱Fig.9 1/3OCT spectrum
根据1/3OCT频谱可知,40Hz时振动最大,40Hz对应的飞机爬升转速为2400r/min。
2.2 双座电动飞机
RX1E-A 双座电动飞机使用50kW 级的稀土永磁同步电动机作为动力,采用超高性能的锂电池作为主要能源,机体结构为全碳纤维复合材料,具有零排放、低噪声的特点。RX1EA 双座电动飞机翼展14.5m,机长6.6m,机高2.5m。最大飞行速度为164km/h,最大起飞重量600kg。电机效率为94%,锂蓄电池电芯容量为40Ah,续航时间为2.5h,具有很高的能源利用率。转速传感器和振动传感器安装位置如图10所示。

图10 双座电动飞机传感器安装Fig.10 Sensor installation of two seat electric aircraft
双座电动飞机平衡结果:平衡前电机架振动速度为0.7in/s,仪器显示不平衡位置在110°,根据使用说明书要求,在290°位置加配重,振动速度降为0.28in/s,在座舱内感觉座椅振动明显降低。
2.3 电动水上飞机
RX1E-S 是在RX1E-A 的基础上,通过增加电动力系统功率和换装双浮筒式水上起落装置研制而成的,是世界首款双座水上电动飞机。双浮筒支架式水上起落装置的排水量为1.2m3。RX1E-S 最大起飞重量为650kg,最大飞行速度为160km/h,最大功率为80kW,巡航功率为20kW,锂电池容量50Ah,续航时间为100min。RX1E-S 电动水上飞机转速传感器和振动传感器安装位置如图11所示。

图11 电动水上飞机传感器安装Fig.11 Sensor installation of electric seaplane
平衡结果:平衡前电机架振动速度为0.35in/s,仪器显示不平衡位置在105°,根据使用说明书要求,在285°位置加配重,振动速度降为0.20in/s,在座舱内感觉座椅振动明显降低。
3 结论
本文采用DYNAVIBE动平衡仪对某型双座电动飞机、某型四座电动飞机、某型电动水上飞机进行螺旋桨外场动平衡,测量出电机架振动速度,并识别出不平衡位置,在不平衡位置加180°方向粘贴质量块,使电机架振动速度降至0.3in/s以下,有效降低了电动飞机整机振动,该方法具有重要的推广应用价值。
猜你喜欢
中学生理科应试(2024年3期)2024-06-26 07:54:45
火控雷达技术(2023年2期)2023-07-15 14:00:06
一重技术(2021年5期)2022-01-18 05:42:12
赤峰学院学报·自然科学版(2021年10期)2021-11-11 03:34:02
固体火箭技术(2018年6期)2019-01-18 10:56:26
中学物理·高中(2016年11期)2016-12-15 01:30:36
河北地质(2016年1期)2016-03-20 13:51:58
振动工程学报(2015年2期)2015-03-01 01:16:07
固体火箭技术(2014年3期)2014-03-15 06:47:06
组合机床与自动化加工技术(2014年9期)2014-03-01 02:21:42