基于VCSEL半导体激光器的浊度传感器设计
2022-11-22 08:42:06李先瑞倪文军
仪表技术与传感器 2022年10期
李先瑞,许 斌,倪文军,张 磊
(1.天津大学,天津 300072;2.交通运输部天津水运工程科学研究所,天津 300456)
0 引言
通常待测水样越浑浊,对光线的阻碍程度越强。在物理现象中表现为:当水越浑浊,透射光越弱,散射光越强;反之,透射光越强,散射光越弱。由此可见,浊度是水中的悬浮颗粒对光线有阻碍作用的光学效应,与水中悬浮颗粒的质量无关,因为密度大且质量大的悬浮颗粒会迅速下沉至底部,对光线不会造成阻碍作用。
文献[1-3]提出采用透射光检测的方式进行浊度测量,该方式结构简单,但浊度较低或光源较强时易造成透射光接收器上光饱和,若降低光强,则会出现透射光接收器灵敏度不够问题;文献[4-5]提出采用散射-投射比较式浊度探测法,该方式可削弱水样变色和光源变化导致的误差,但需保证散射光接收器和透射光接收器在待测水样中的路径一样长,而散射光和透射光之比并非严格线性关系,造成该种方式的局限性。
文献[6-7]提出采用前向散射式和垂直90°散射式浊度测量,这2种方式的光源与散射光接收器距离较远,因此对光源选择和整体设计结构有较高要求,无法满足便携式测量要求。
综上所述,本文采用后向散射光接收方式,以850 nm的VCSEL半导体激光器为光源,设计了一种浊度传感器,可输出稳定的4~20 mA信号,测量量程最高可达400 NTU。
1 半导体激光器浊度传感器设计
1.1 总体架构设计
半导体激光器浊度传感器整体结构包括光学采集模块、信号处理模块、信号输出模块、电源供电模块等,如图1所示。光学采集模块主要提供稳定性强、线性度高、功耗低的光源,滤除干扰波段的外界光源,并接收850 nm波段的散射光信号;信号处理模块包括积分放大电路、I/V转换电路、滤波检波电路、三级运放电路、振荡电路、温度补偿电路和差分放大电路,用于将接收的散射光信号进行处理;信号输出模块包括反向放大电路和4~20 mA转换电路,将散射光信号转换成4~20 mA信号;电源供电模块可提供9~15 V宽电压电源,给硬件电路中的芯片供电。

图1 浊度传感器整体结构
1.2 光学采集模块设计
光学采集模块采用后向散射光接收方式,光源以水为介质进行传播,由于介质中存在杂质导致部分光源偏离原来传播方向,通过接收该部分光源,当水中悬浮物直径小于入射光波长时,根据瑞利散射定律推导出散射光光强[8-10],如式(1)所示。
(1)
式中:IR为散射光光强;I0为入射光光强;V为单个微粒的体积数;N为单个体积水中的微粒数;λ为入射光波长;γ为悬浮颗粒到散射光接收点的距离;n为水的折射率;n0为微粒的折射率。
当水中悬浮物直径大于入射光波长时,根据米尔散射定律推导出散射光光强,如式(2)所示。
IR=KmANI0
(2)
式中:Km为米尔散射系数;A为悬浮微粒的表面积;N为水中的悬浮微粒个数。
综合瑞利散射定律和米尔散射定律可得出,入射光在水中与水中悬浮物的体积、数量成正比,与波长成反比。因此,选择合适的光源和滤光处理十分重要。
本文以VCSEL半导体激光器作为光源[11-12],波长为850 nm,半导体激光器相对于其他光源具有更好的线性度,温度更易控制,并且功耗较低,其比较如表1所示。

表1 探测器光源比较
光学采集模块前端由VCSEL半导体激光器、遮光套管、滤光片、散射光接收器统一整合到一起,采用聚氨树脂进行密封灌胶,如图2所示。其中遮光套管套于半导体激光器外部,以免发出的光源直接被散射光接收器接收,造成测量误差;滤光片置于半导体激光器和散射光接收器上方,用于滤除多余的环境光和其他波段的光源;散射光接收器用于接收后向散射的光源。

图2 光学采集模块整体图
鉴于VCSEL半导体激光器的发射角度为垂直腔面出射,为提高浊度检测范围以及对光学采集窗口大小的控制,半导体激光器和散射光接收器间的距离设置为固定值,以保证散射光接收角度为140°~170°。
1.3 信号处理模块设计
信号处理模块由I/V转换电路、滤波检波电路、三级运放电路、振荡电路、温度补偿电路和差分放大电路组成。
I/V转换电路在接收到光源散射后,将μA级的光电流信号进行初步放大,转换为电压信号并经过滤波检波电路滤除低频信号,电路如图3所示。鉴于接收的光电信号较微弱,设计采用低噪声、偏置电流小的运算放大器,其容性负载可超过500 pF,电源电流低于630 μA/amp,轨到轨摆幅能力可缓冲CMOS和DAC等器件。

图3 I/V转换电路图
由于电路在放大微弱的光电信号过程中会产生额外的误差,特别是放大电路引起的失调误差和输出漂移[13-14],因此增加振荡电路,为各运算放大器提供标准频率的振荡信号,该信号为5 kHz的方波,经过调制后的交流方波信号在处理过程中受噪声和误差的影响较小,确保信号放大的稳定性。
温度补偿电路用于对发射的光电信号进行补偿,采用高精度的热敏电阻捕获外界环境温度的变化,然后经过一级运算放大器获取相应的电压值,再通过振荡电路和高精密模拟开关的控制,每0.2 ms对发射光源信号进行温度修正补偿,将温度对浊度的影响降到最低,如图4所示。
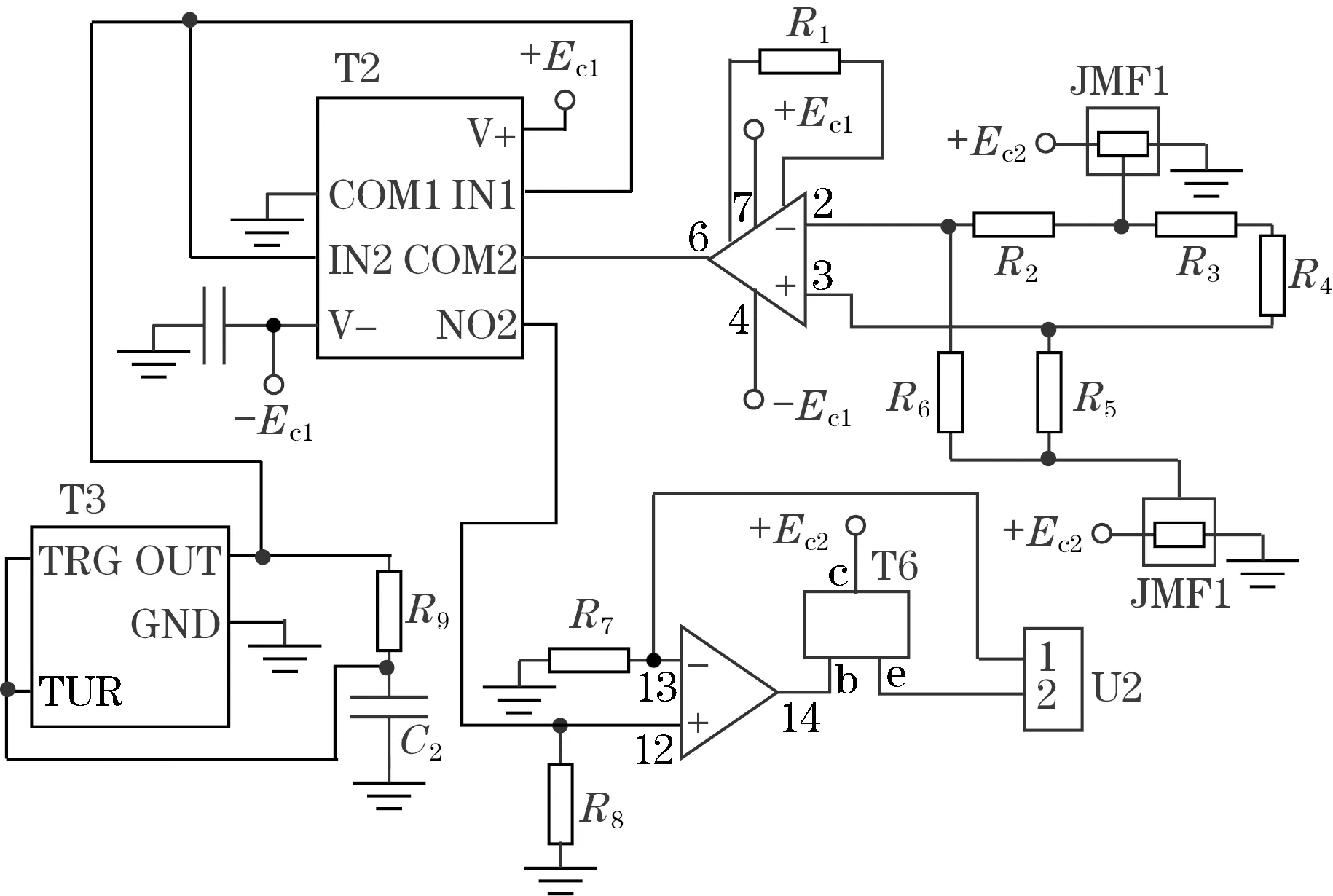
图4 振荡及温度补偿电路图
1.4 信号输出模块设计
考虑到信号稳定性和用户使用便捷性,信号输出模块主要由反向放大电路和4~20 mA转换电路组成。
反向放大电路主要具有2个功能,一是将信号处理模块输出的信号进行进一步放大,提供给4~20 mA转换电路,二是在反向放大电路的同向端加入电压补偿电路,该电路可将运算放大器差分输入信号控制在一定范围,以防压差太大,无法进行4~20 mA信号的转换。
4~20 mA转换电路主要用于将电压信号转换成4~20 mA信号,考虑到增益误差和非线性度的影响,本次设计采用INA105系列的芯片,该芯片通过配置对应的源阻抗可将共模抑制比降低到80 dB,且非线性度误差影响可降到0.001%,具体设计如图5所示。

图5 信号输出模块电路图
2 实验环境与分析
2.1 实验环境
基于VESEL半导体激光器的浊度传感器计量方式分为标准浊度溶液下的测量和非标准溶液下的测量2种方式。
标准浊度溶液测量采用0.01 g/mL的硫酸肼与0.1 g/mL的六次甲基甲胺,按照1∶1混合制成浊度为4 000 NTU的标准溶液500 mL。然后依次稀释至2 000 NTU、1 000 NTU、500 NTU、250 NTU及125 NTU。非标准溶液采用清水和牛奶的混合,通过调整两者的配比得到不同浊度溶液。
浊度传感器的率定工作在标准浊度溶液中进行,如图6所示。率定完成后将浊度传感器与标准的计量器具进行对比,以验证传感器的精确性和稳定性。

图6 浊度传感器
2.2 实验分析
2.2.1 率定分析
将浊度传感器分别置于空气、清水、125 NTU、250 NTU、500 NTU、1 000 NTU、2 000 NTU和4 000 NTU的标准浊度溶液中,记录输出的4~20 mA电流值。注意率定过程中需保证测量容器侧壁无反光,光路20 cm内无障碍物。每组率定数据测试5次,测量结果如表2所示。

表2 浊度率定数据
根据5次的测量结果取平均值,然后获取浊度的率定曲线图,如图7所示。其中x为测量的4~20 mA电流信号值,y为溶液的浊度。

图7 浊度传感器率定曲线
根据获得的拟合曲线进行反算可知,该拟合曲线最大示值误差为1.6%,拟合度较好,精度符合要求。
2.2.2 重复性分析
重复性试验是浊度传感器的重要指标,将传感器浸泡于清水中72 h,每0.5 h记录1次浊度数据值,测得对应的浊度数据曲线图如图8所示。

图8 浊度传感器重复性试验曲线
由测试结果可知,该浊度传感器在水中浊度保持不变的条件下,所测得的电流信号值也趋于稳定,最大误差值为3 μA,能够保证浊度传感器长期置于水中稳定可靠。
2.2.3 精度分析
精度试验主要将浊度传感器和计量设备同时放置于标准浊度溶液和非标准溶液中,比对两者的精度值。
标准浊度溶液测量中,将4套浊度传感器和一套计量设备同时置于31.25、62.5、125、250、500、1 000、2 000、2 666、3 000、4 000 NTU的标准溶液中,测得对应的4~20 mA电流值信号,根据率定曲线转化成NTU值,数据结果如表3所示。

表3 标准溶液下浊度比对数据 NTU
通过实验测得,在标准浊度溶液下,计量设备的最大相对偏差为1.39%,1#~4#浊度传感器的最大相对偏差分别为0.94%、1.29%、1.36%、0.91%,测量结果较精准,能够准确地测量不同浑浊度的溶液的浊度值。
非标准浊度溶液测量中,将4套浊度传感器和一套计量设备同时置于牛奶和清水混合的非标准溶液中,测得对应的4~20 mA电流值信号,根据率定曲线转化成NTU值,将4套浊度传感器和计量设备数据进行比对,结果如表4所示。

表4 非标准溶液下浊度比对数据 NTU
通过实验测得,在非标准浊度溶液下,1#~4#浊度传感器与计量设备的最大相对偏差分别为0.162%、0.154%、0.105%、0.91%,测量结果较精准,能够准确地测量不同浑浊度的溶液的浊度值。
3 结论
本文设计一种浊度传感器,利用850 nm的VESEL半导体激光器为光源,采用后向散射光检测法,配合光学采集模块、信号处理模块、信号输出模块和电源供电模块,将散射光信号转换成4~20 mA信号,并通过率定曲线计算出具体的溶液浊度,其搭配浊度含沙量采集器可实时传输测量数据至管理中心。浊度传感器准确度误差在±1.36%以内,稳定性优于0.6%,具有较高的准确性和可靠性。
猜你喜欢
供水技术(2022年1期)2022-04-19 14:11:38
云南化工(2021年6期)2021-12-21 07:31:06
科技资讯(2021年2期)2021-03-28 02:24:49
中国医科大学学报(2020年2期)2020-04-18 00:54:54
铁道通信信号(2018年8期)2018-11-10 05:15:48
酒·饮料技术装备(2018年1期)2018-04-28 09:09:09
南方人物周刊(2017年25期)2017-08-25 06:06:50
科学与财富(2017年15期)2017-06-03 19:40:59
中国医药指南(2016年20期)2016-01-31 17:16:46
上海铁道增刊(2015年1期)2015-03-23 09:25:02