
基于干扰观测器的改进滑模控制算法*
2022-11-09 02:34:28王冬青
计算机与数字工程 2022年9期
周 振 王冬青
(1.青岛大学自动化工程学院 青岛 266071)(2.青岛大学电气工程学院 青岛 266071)
1 引言
如今,机械臂越来越多地应用于工业领域,以完成复杂而艰巨的任务[1~3]。由于机械臂是强非线性、多变量系统,且存在负载变化、建模不确定性和外部干扰,使得机械臂轨迹跟踪控制一直以来都是机器人领域的重点难点[4~6]。因此,应采用适当的控制方法,实现快速的、高精度的轨迹跟踪控制。近年来,国内外学者对此做了大量研究。机械臂轨迹跟踪控制常用的算法有自适应PID控制、计算力矩控制、模糊自适应控制以及滑模变结构控制[7~9]。自适应PID控制不需系统建模,只需根据期望轨迹与实际轨迹的偏差进行负反馈控制,但是在外界干扰和系统不确定性较大的情况下难以保证机械臂的动静态品质[10]。计算力矩控制是在控制回路中引入一个非线性补偿使机械臂系统线性化且解耦[11~12],因此计算力矩控制法十分依赖精确的机械臂动力学模型,而这在实际应用中尤为困难。模糊自适应控制不需要机器臂精确的动力学模型,但是依赖于控制专家的经验知识[13~14]。
相比之下,滑模控制对参数变化和外部干扰具有理论上的完全鲁棒性[15],在没有精确模型的情况下易于设计,所以其成为处理具有非线性、不确定动力学和有界输入干扰下的机械臂轨迹跟踪控制问题的重要方法之一。但由于滑模控制具有非连续开关特性,会引起系统的高频抖振,抖振会增加控制器负担,甚至会损坏控制器的部件。而且滑模控制必须事先评估外部干扰和系统参数误差的边界,而这在驱动控制系统中通常很难实现。近年来,干扰观测器与滑模控制相结合的控制策略成为了研究重点[16~18]。文献[19]提出了一种干扰观测器和非线性滑模控制器相结合的控制算法,在两连杆机械臂上验证了算法的有效性。文献[20]将干扰观测器与非奇异终端滑模控制器相结合,设计了一种有限时间稳定系统,在跟踪速度和精度方面都有不错的表现。文献[21]利用模糊干扰观测器处理系统的不确定项,同时使用非线性滑模控制器对扰动做进一步补偿。
上述文献所提方法能够估计外界干扰并加以补偿,不需要未知上界的先验知识,但是在抑制抖振方面却并不理想,本文将干扰观测器与基于趋近律的滑模控制相结合,并且在指数趋近律的基础上提出了一种新的趋近律,提升系统的动态性能。
2 两连杆机械臂建模
两连杆机械臂如下图所示其中,l1和l2为后臂连杆和前臂连杆的长度。m1和m2分别是后臂连杆和前臂连杆的质量。q1和q2分别是两关节的角度。
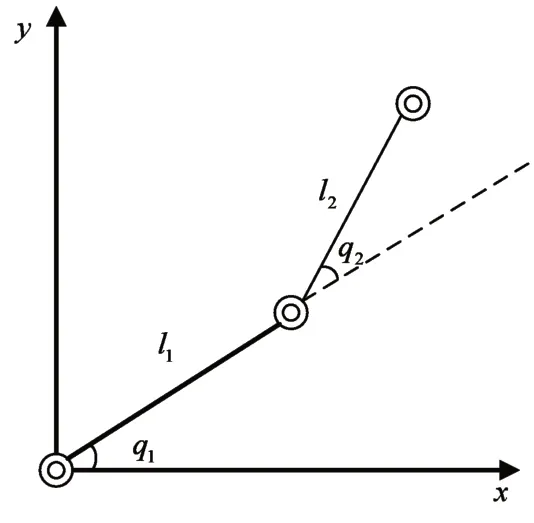
图1 双关节机械臂示意图
根据拉格朗日建模方法,将两连杆机械臂的动力学模型表示为

其中,M(q)∈R3×3为正定惯性矩阵,为离心力和哥氏力矩阵;G(q)∈R3为重力项矩阵。τ∈R3为控制力矩,D∈R3为外界干扰项,一般情况下,机械臂精确的动力学模型难以获得,所以将模型分为已知部分和未知部分:M(q)=M0(q)+ΔG(q)。那么机械臂的动力学模型可以表示为

其中d=D+ΔM+ΔC+ΔG,包括模型不确定性和不确定干扰项,并假设其有界。
3 控制算法
3.1 改进趋近律设计
本文在指数趋近律的基础上进行改进,指数趋近律表示如下:

可以看出指数趋近律的切换带为带状,系统状态在做滑模运动时,不能趋近于原点,而是在原点附近来回震动进而引起高频抖振。本文对指数趋近律做出如下改进,利用非线性函数fal(s,a,δ)代替符号函数sgn(s),并且引入自适应项||s2,表示如下:

非线性函数fal(s,a,δ)表示为
其中,常数a能够决定fal(s,a,δ)的非线性程度,a的取值越大,函数的非线性程度越高。δ为非线性函数在原点附近线性区间段的长度。自适应项|s|2能根据s绝对值的大小自适应的调节趋近速度。取a=0.2,δ=0.1,非线性函数fal(s,a,δ)和符号函数sgn(s)的比较曲线如下图所示。
由图2可以看出当系统误差比较大时,即|s|>δ时,趋近律为s˙=-ε|s|asgn(s)-k|s|2s,相较于传统指数趋近律有更大的绝对值,因此趋近律有更快的趋近速度。当系统状态接近滑模面时,即|s|≤δ时,fal(s,a,δ)为光滑的正比例函数,而此时趋近律为s˙=-εδa-1s-k|s|2s,δa-1s为主导项,趋近律等同于光滑的线性函数,使得系统的切换过程平滑而连续。
由上述分析可知,改进趋近律既克服了指数趋近律中滑模切换到为带状的缺点又提高了系统状态趋近于滑模面的速度。并且ss˙≤0,满足滑模存在及可达性条件。
3.2 干扰观测器设计
干扰观测器可以根据实际被控对象和名义被控对象的差异得出等价干扰,并在控制中引入等效的补偿,实现系统的精确控制。系统的控制流程图如图3所示。
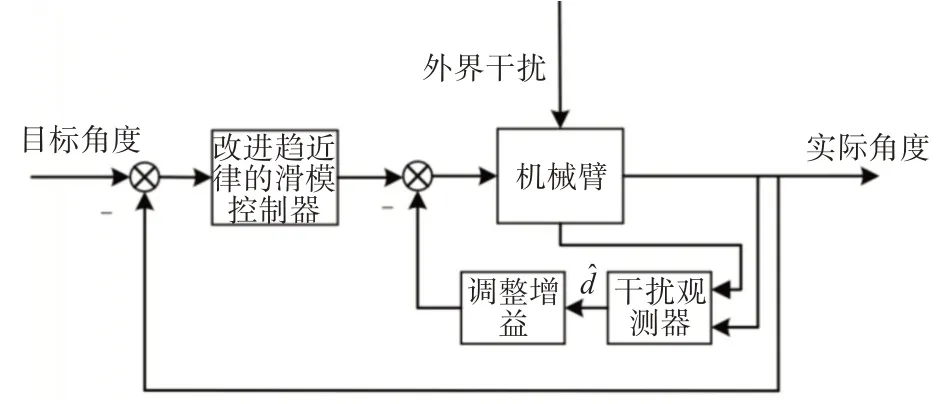
图3 基于DOB的机械臂滑模控制系统
将干扰观测器设计为

式(7)中,表示观测器干扰观测值,L(q,˙)表示待设计增益矩阵,定义辅助参数向量:

其中,p(q,˙)为待设计的非线性函数且应满足式(8)条件:

联立式(6)、(7)、(8)得到:

综上所述,DOB设计为

使用干扰观测器后,控制端会得到一个等价干扰,将干扰观测器的估计误差定义为ed=d-,机械臂动力学模型可变为

假设干扰的变化相对观测器的动态特性是缓慢的,即˙=0,由此可得:


3.3 滑模控制器设计
定义系统的跟踪误差为e=q-qd,并采用线性滑模面:

求导得到:

将式(11)带入上式得:

联立式(4)得到系统的总控制率:

4 仿真与分析
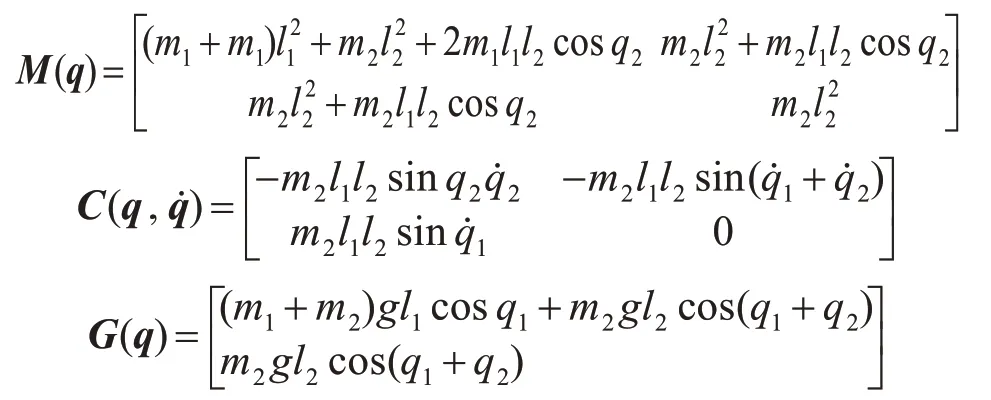
两连杆机械臂的动力学模型为

其中:
机械臂的参数取m1=1kg,m2=2kg,l1=1m,l2=0.9m,g取9.8。设计干扰观测器参数为滑 模 控 制 器 参 数 设 定 为a=0.2,δ=0.1,ε=0.2,k=0.2,Λ=diag(5,5)。
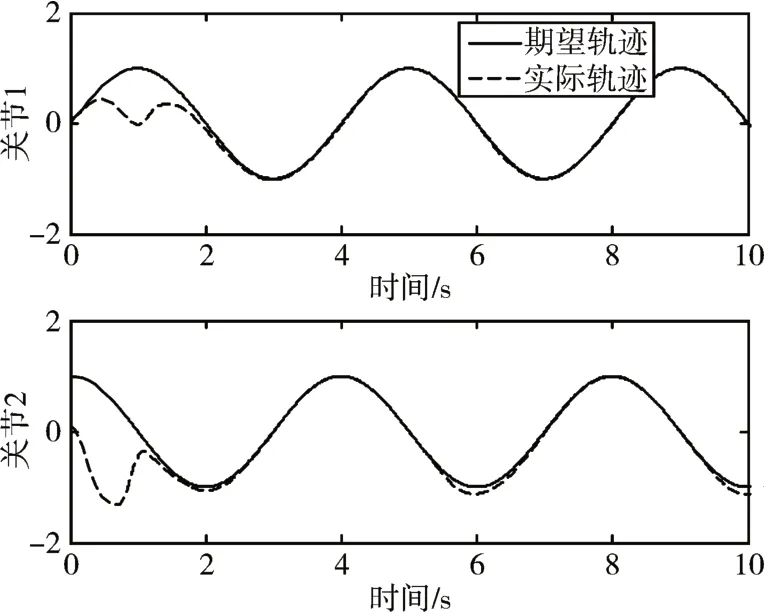
图4 基于指数趋近律的轨迹跟踪效果
结合图4、图5和图6可以看出,在建模误差和不确定干扰完全未知的情况下,本文改进算法的轨迹跟踪效果不仅提升了跟踪精度,而且由于趋近律中自适应项的引入,加快了误差收敛速度。
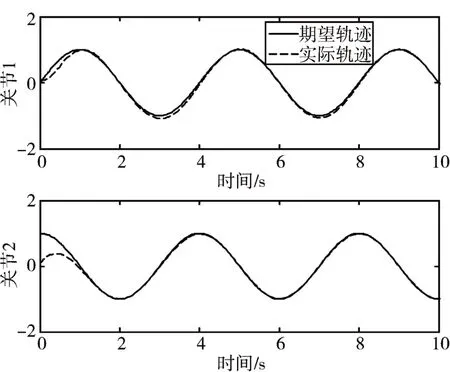
图5 本文改进方法的轨迹跟踪效果
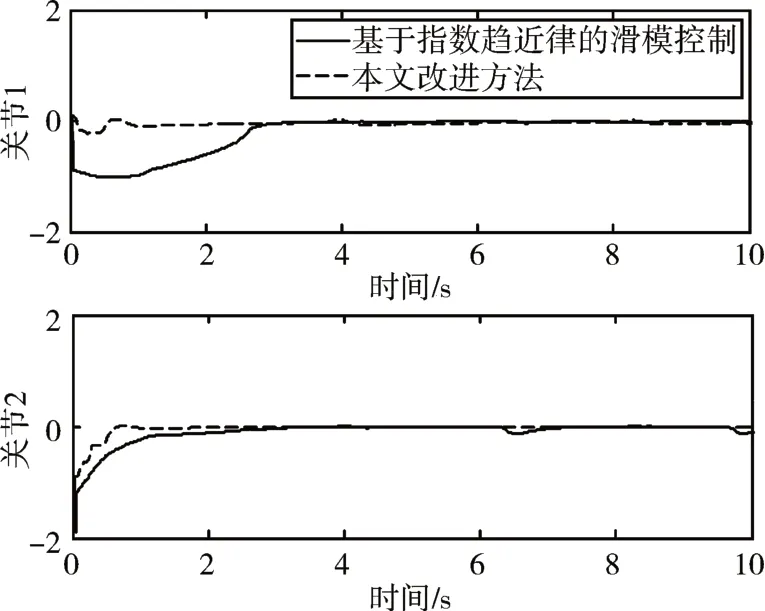
图6 两种方法轨迹跟踪误差对比
由图7和图8可以看出,基于指数趋近律的滑模控制的输出力矩抖振较为严重,尤其是在1s~2s处,而本文改进算法输出力矩基本平稳,仅有轻微抖振,这在实际应用中可以有效地避免机器人控制器件的消耗。
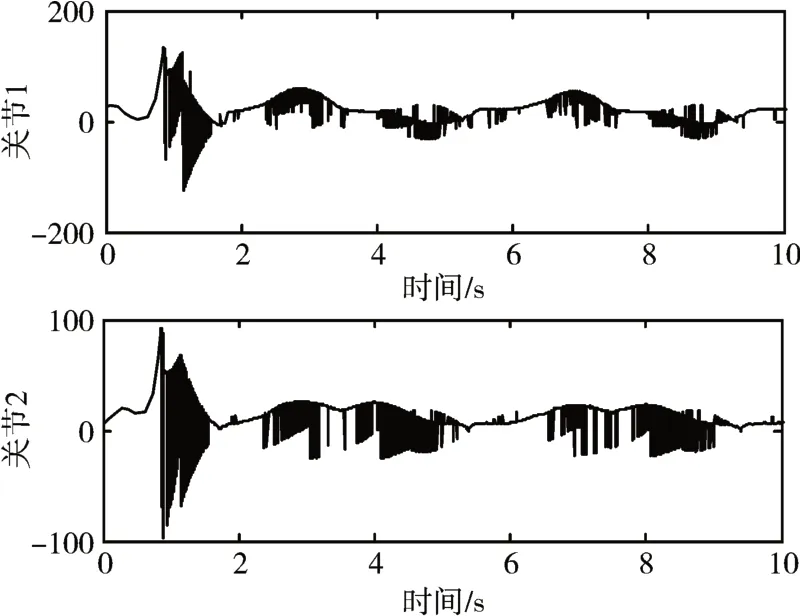
图7 基于指数趋近律的关节力矩输出
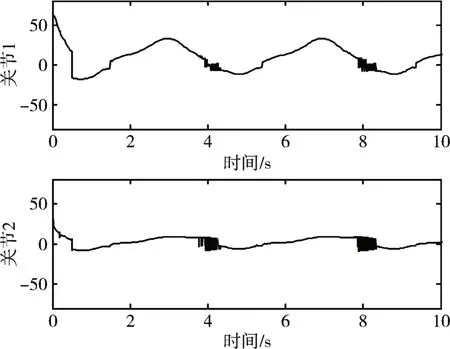
图8 本文改进方法的关节力矩输出
5 结语
本文提出的基于干扰观测器的改进滑模控制算法,无需上界先验知识,利用干扰观测器观测外部干扰和建模不确定性,并在控制输入端补偿。在指数趋近律中引入非线性fal函数有效地削弱了滑模控制中固有的抖振现象,引入自适应项目减小误差的收敛时间。对两连杆机械臂进行仿真实验,对比传统的基于指数趋近律的滑模控制,仿真结果表明本文所提算法在关节角度的跟踪速度和精度上都优于传统算法,并且极大地削弱输出力矩的抖振。
猜你喜欢
装备制造技术(2020年2期)2020-12-14 03:09:26
中国惯性技术学报(2019年6期)2019-03-04 09:50:06
测控技术(2018年4期)2018-11-25 09:47:26
测控技术(2018年3期)2018-11-25 09:45:40
铁道科学与工程学报(2015年5期)2015-12-24 12:12:08
深空探测学报(2015年3期)2015-12-07 11:15:06
电测与仪表(2015年19期)2015-04-09 11:32:56
机械工程师(2015年9期)2015-02-26 08:38:12
机械工程师(2015年10期)2015-02-02 01:14:36
电测与仪表(2014年11期)2014-04-04 09:21:36
